Изобретение относится к измерительной технике в области атомной и тепловой энергетики, химической и других отраслей промышленности.
Известны устройство для акустического детектирования в ядерном реакторе (патент Великобритании, N 1349435, кл. G 01 H 3/00, 1974), установка для акустических измерений в среде реактора (патент США, N 3838593, F 17 D 3/04, 1974), устройство для дистанционного измерения угла наклона подвижного объекта (авт. св. СССР N 1069512, кл. G 01 C 09/08, 1981), содержащие подвижные объекты измерения с пьезоэлементами и измерительными приборами.
Недостатками указанных устройств являются неточность проводимых измерений, ненадежность и ограниченность в применении, высокая материалоемкость.
Наиболее близким к изобретению является автоматическое устройство (патент США, кл. В 62 D 55/26 N 758443), содержащее прямоугольную раму на колесах, приводимую с помощью электродвигателя.
Недостатками прототипа являются ненадежность и неточность измерения, ограниченность применения.
Целью изобретения является повышение качества и расширение функциональных возможностей, повышение точности измерений.
Цель достигается так, что рама установки выполнена подвижной и сканирующее устройство, закрепленное на раме, имеет возможность вертикального перемещения и снабжено измерительными элементами, причем рама выполнена в виде Г-образной трубчатой пространственной конструкции, содержащей подвижную полость с устройствами вращения (турель, зубчатое колесо) с силовыми цилиндрами, оборудованными сканирующими устройствами, телеобъективами, механизмы перемещения приводятся с помощью шаговых двигателей с редукторами.
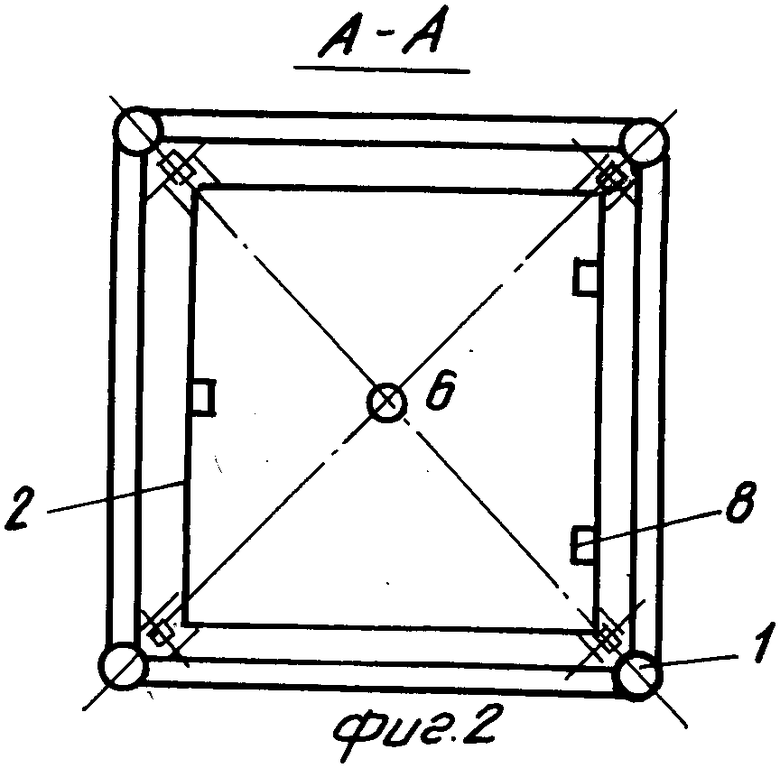
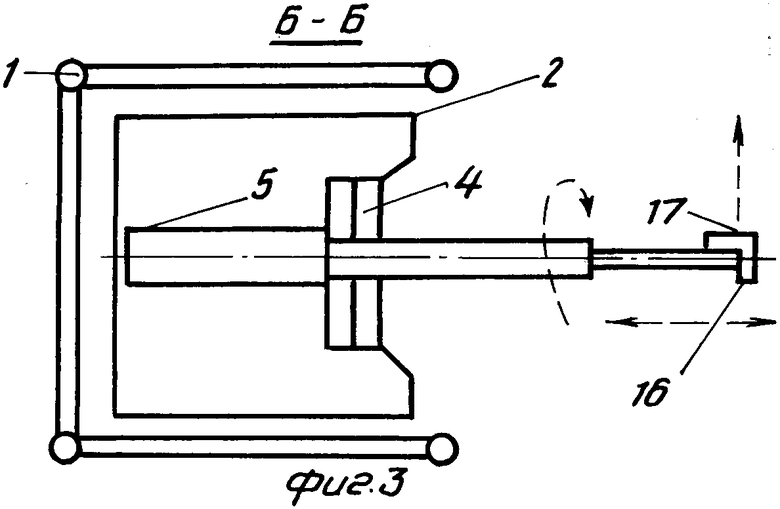
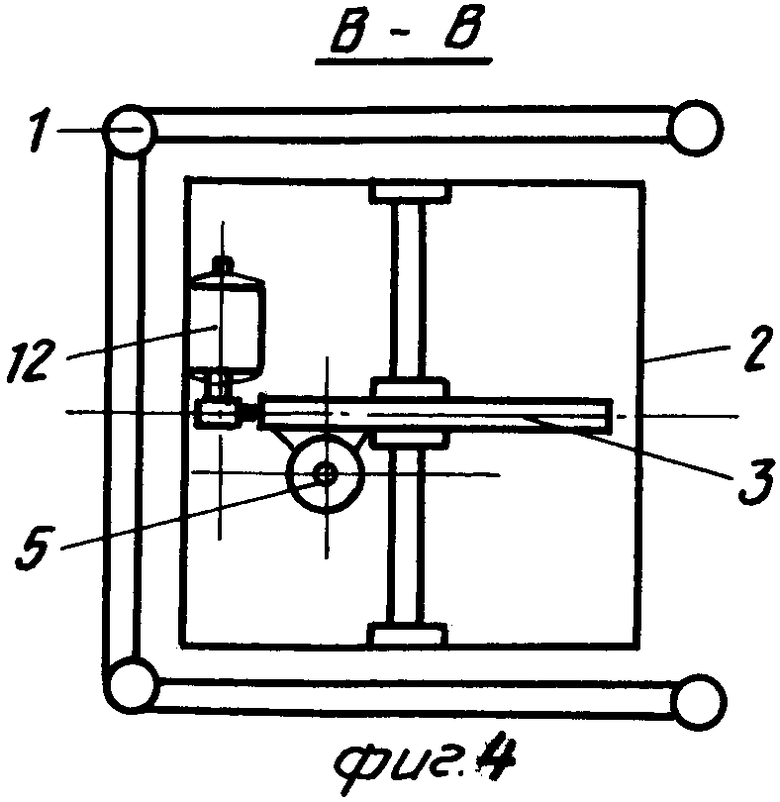
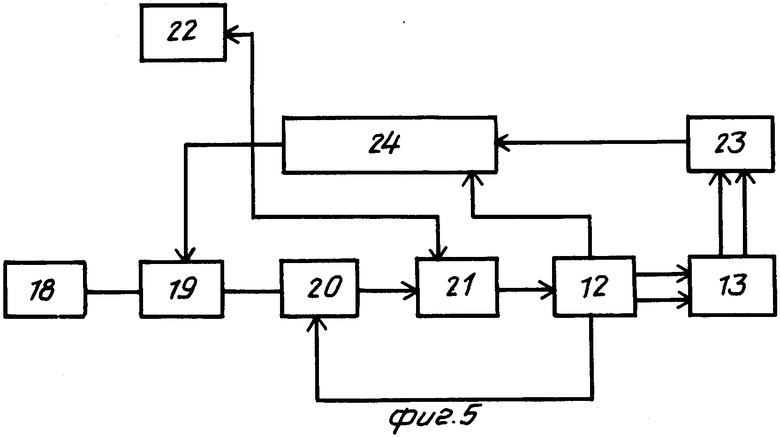
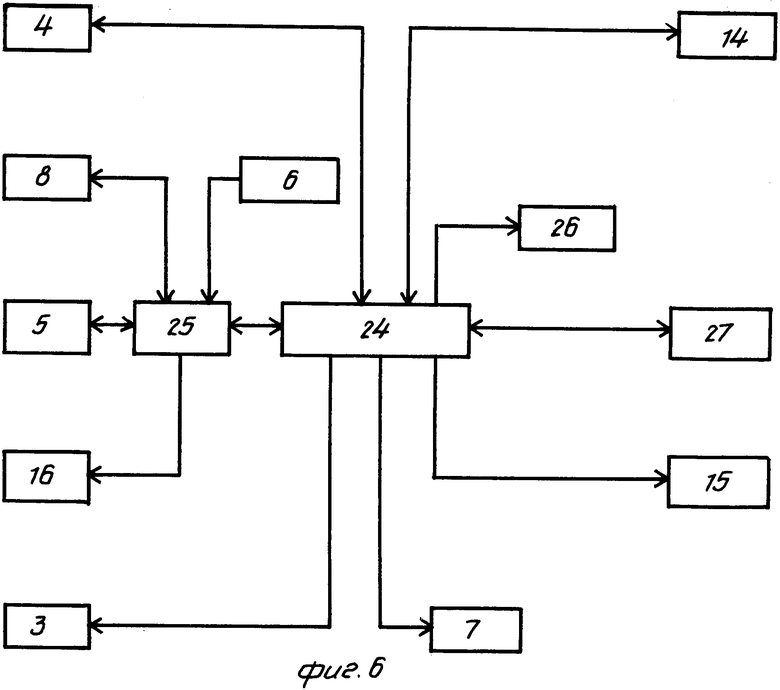
На фиг. 1 схематично изображена установка, общий вид; на фиг.2 показано сечение А-А на фиг.1; на фиг.3 сечение Б-Б на фиг.1; на фиг.4 сечение В-В на фиг. 1; на фиг.5 приведена структурная схема управления шаговым двигателем; на фиг.6 схема управления установкой.
Установка для неразрушающего контроля ядерных реакторов имеет Г-образную трубчатую пространственную раму в виде блоков-модулей 1, оборудованную подвижной полостью 2, снабженной внутри поворотным зубчатым колесом 3 и турелью 4 с силовыми цилиндрами 5, лазерной установкой 6, а снаружи установлены телеобъективы 7 и ультразвуковые измерительные элементы 8 положения полости. Рама установлена на катках 9, контактирующих с опорным прогоном 10 и лимбом 11. Ее вращение и опускание подъем подвижной полости, а также зубчатого колеса и турели, осуществляются с помощью шаговых двигателей 12 с редукторами 13 соответственно механизмов измерительного 14 и вертикального 15 перемещения. Силовые цилиндры 5 оборудованы сканирующими устройствами 16, снабженными преимущественно ультразвуковыми измерительными элементами 17. Управление шаговыми двигателями осуществляется с помощью генератора 18 частоты, делителя 19 частоты, логического блока 20, инвертора 21 со счетчиком 22 шагов и датчиком 23 положения ротора преобразователя угла в код, связанными с микроЭВМ 24. Управление установкой выполняется через механизм вращения турели 4, зубчатое колесо 3, перемещение силовых цилиндров 5, азимутальное 14 и вертикальное 15 перемещения, а также измерениями через датчики 23 положения, датчики сканирующих устройств 16 и визуального наблюдения с помощью лазерного устройства 6 и телеобъективов 7, которые через пульт 25 ручного управления связаны с микроЭВМ 24, дисплей 26 и ЭВМ 27.
Установка для неразрушающего контроля корпуса реактора работает следующим образом.
По программе ЭВМ 27 и микроЭВМ 24 с помощью механизма 14 азимутального перемещения Г-образная пространственная рама 1 устанавливается в требуемое положение в плане, которое контролируется датчиками 23 и визуальное телеобъективами 7 по лимбу 11 и положению лазерного луча от установки 6, после чего с помощью механизма 15 подъема-опускания полость 2 опускается на необходимую глубину, контроль которой осуществляется ультразвуковыми измерительными элементами 8 по величине отражаемого сигнала от поверхности, датчиками 23 положения и визуально по величине затухания лазерного луча. Далее с помощью шаговых двигателей 12 турель 4 или зубчатое колесо 3 приводятся в заданное положение и с помощью силовых цилиндров 5 сканирующие устройства 17 устанавливаются на поверхность, которая исследуется с помощью измерительных устройств 17, например ультразвуковых. Полученные данные передаются на микроЭВМ 24, высвечиваются на дисплей 26 и вводятся в ЭВМ 27.
При необходимости могут быть задействованы для проведения измерений одновременно два сканирующих устройства. Весь процесс измерения и управления автоматизирован.
Известны отечественные устройства для неразрушающего контроля корпуса реактора СК-187, АСТ500-СК-500, ВВЭР-440-УСК-213 (НИКИМТ), стран СЭВ "Реактортест-Шкода" и ведущих капиталистических стран фирмы Siemens, "Реактортест" (Швеция), Reactor Pressute Vessel Examination (Франция), Nuccamm-80 (Япония) и др. которые не обладают достаточной точностью, имеют малую производительность, сложны в эксплуатации и ограничены в применении.
Технико-экономическая эффективность применения предложенной установки для неразрушающего контроля корпуса реактора в сравнении с базовым объектом (прототипом) заключается в следующем. Повышение точности достигается за счет улучшения контактов в местах измерений, точности фиксирования положения сканирующих устройств и установки в целом на основе повышения жесткости конструкции, совмещения ультразвуковых, визуальных и других измерений. Повышение производительности установки достигается за счет ускорения перемещений и двойного обследования сканирующими устройствами стенок корпуса с одной установки. Расширение функциональных возможностей обеспечивается модульностью и применением установки для контроля стенок днища и патрубков во всех измерениях. Кроме того, предлагаемая установка имеет меньшую общую металлоемкость на 40-50% многоцелевой характер за счет сборно-разборности блок-модулей рамы, простоту в эксплуатации узлов, звеньев и установки в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1992 |
|
RU2061612C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ФЕРРОМАГНИТНЫМ ПОВЕРХНОСТЯМ | 1992 |
|
RU2051058C1 |
| УСТРОЙСТВО ДЛЯ ЗАЧИСТКИ СВАРНЫХ ШВОВ | 1994 |
|
RU2115518C1 |
| СПОСОБ ДИАГНОСТИКИ АВАРИЙНОГО ЯДЕРНОГО РЕАКТОРА | 2012 |
|
RU2503075C1 |
| ЭЛЕКТРОННО-МЕХАНИЧЕСКИЙ МАГНИТНЫЙ ОРТОГРАФ | 1994 |
|
RU2115114C1 |
| УЛЬТРАЗВУКОВОЙ ИЗМЕРИТЕЛЬ ЗАЗОРОВ В МНОГОСЛОЙНЫХ КОНСТРУКЦИЯХ | 1993 |
|
RU2084821C1 |
| УЛЬТРАЗВУКОВОЙ НАКЛОНОМЕР | 1994 |
|
RU2084823C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ | 1994 |
|
RU2115089C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНЫМ ПОВЕРХНОСТЯМ ТРУБОПРОВОДОВ | 1991 |
|
RU2023619C1 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ ПРИ ОПРЕДЕЛЕНИИ НАПРЯЖЕННОГО СОСТОЯНИЯ МЕТАЛЛА СТЕНОК ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ ЯДЕРНЫХ РЕАКТОРОВ ТИПА РБМК | 1999 |
|
RU2188412C2 |
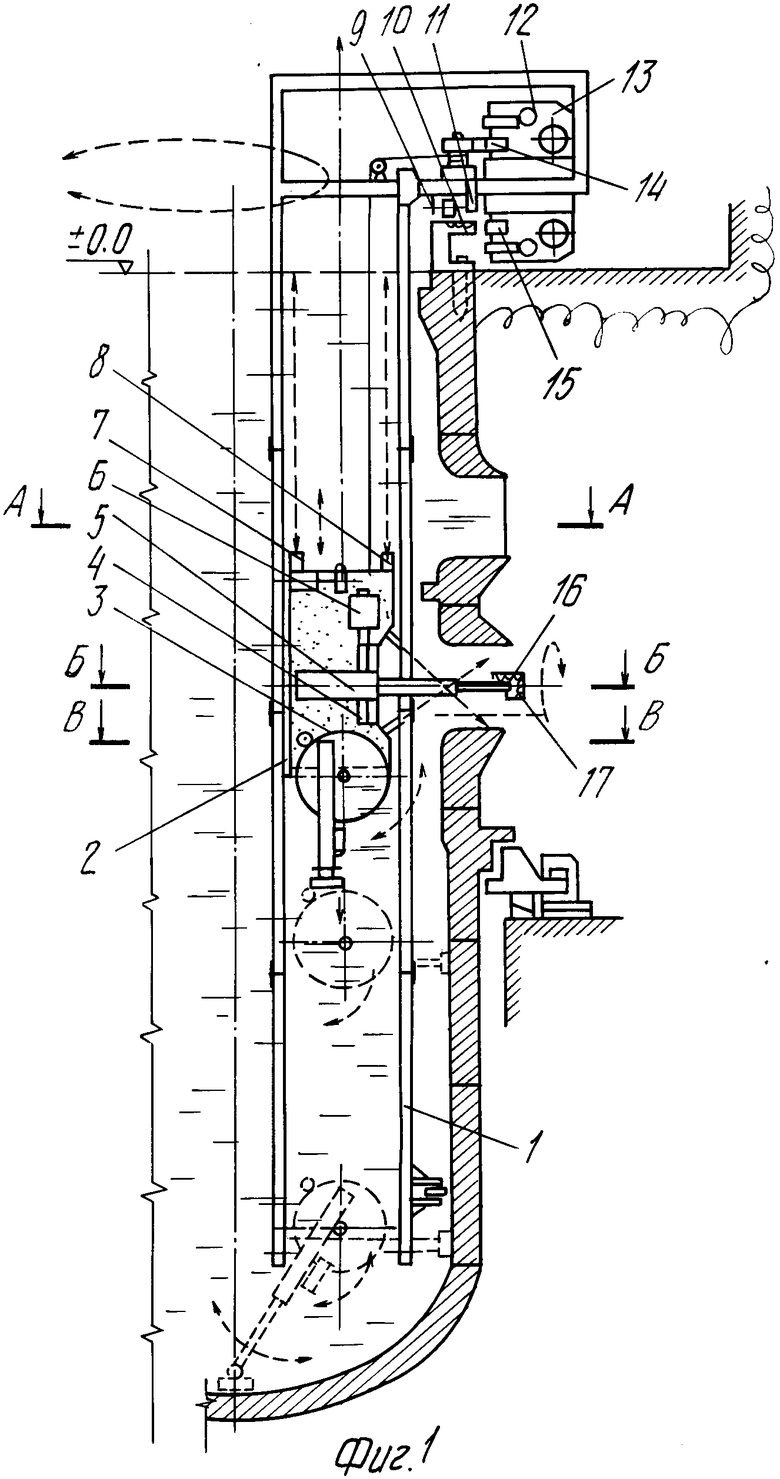
Сущность изобретения: установка имеет Г-образную трубчатую пространственную раму в виде блоков-модулей, оборудованную подвижной полостью, снабженной внутри поворотным зубчатым колесом и турелью с силовыми цилиндрами, лазерной установкой. Снаружи установлены телеобъективы и ультразвуковые измерительные элементы положения полости. Рама установлена на катках, контактирующих с опорным прогоном. Ее вращение и опускание подъем подвижной полости, а также зубчатого колеса и турели осуществляются с помощью шаговых двигателей. Силовые цилиндры оборудованы сканирующими устройствами, снабженными ультразвуковыми измерительными элементами. 1 з.п. ф-лы, 6 ил.
| Манипулятор для неразрушающего контроля корпуса реактора | 1984 |
|
SU1263116A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
