Область техники, к которой относится изобретение
Изобретение относится к области радиолокации и может быть использовано для защиты от несинхронных импульсных помех (НИП), с целью улучшения характеристик обнаружения полезного эхо-сигнала.
Уровень техники
В настоящее время в импульсно-доплеровских радиолокационных станциях (РЛС) по-прежнему актуальна задача обнаружения полезного эхо-сигнала на фоне несинхронных импульсных помех, которые воздействуют на амплитуду и фазу эхо-сигнала в одном или нескольких периодах пачки импульсов. Влияние на полезный эхо-сигнал повлечет за собой искажение радиолокационной информации, увеличение вероятности ложной тревоги и снижение вероятности правильного обнаружения. При этом для корректной работы импульсно-доплеровских РЛС помимо защиты эхо-сигнала от влияния НИП, также востребовано картографирование НИП для их последующего анализа и классификации.
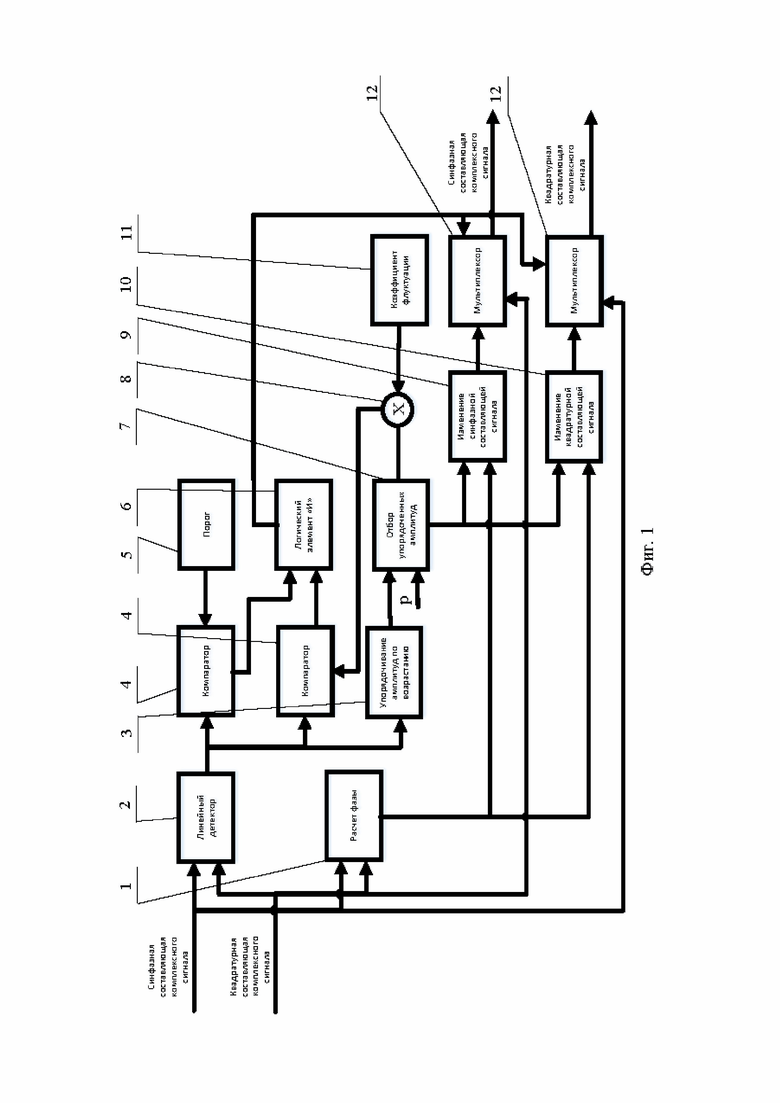
Известный способ защиты эхо-сигналов от НИП в приемном канале импульсно-доплеровских радиолокационных станций, учитывающий опыт предыдущих разработок, представлен на фиг. 1 (патент РФ №2736625, МПК G01S 7/292, 2006.01). Способ содержит: блок расчета фазы, блок линейного детектора, блок упорядочивания амплитуд по возрастанию, блоки компаратора, блок порога, блок логического объединения признаков по «И», блок отбора упорядоченных амплитуд, блок умножения, блок изменения синфазной составляющей сигнала, блок изменения квадратурной составляющей сигнала, блок коэффициента флуктуации, блоки мультиплексоров. Способ позволяет регулировать чувствительность обнаружения НИП и уменьшить их влияние на полезные сигналы с помощью задаваемых параметров: прогнозируемого среднего значения и превышения допустимой флуктуации амплитуд. Однако, недостатком такого способа является отсутствие возможности выполнить анализ воздействия НИП с классификацией, учитывающей: возникновение помехи на временном интервале и количество попаданий помехи в элемент разрешения по дальности.
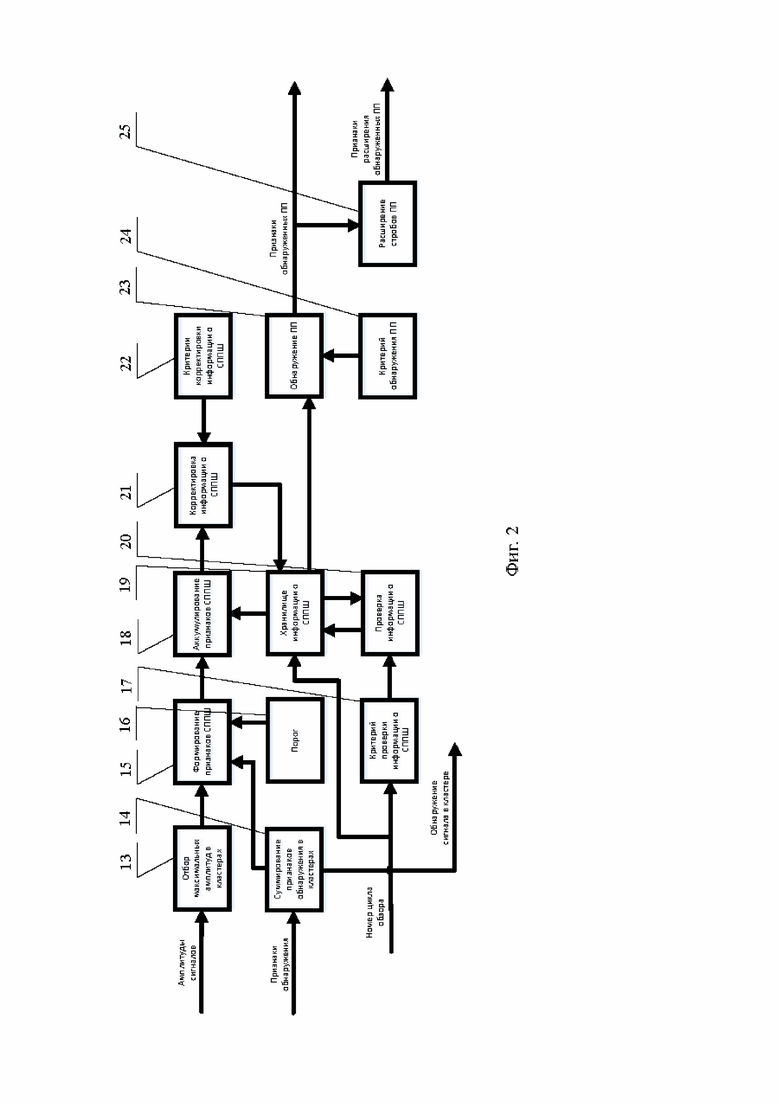
Из уровня техники также известен способ межобзорного картографирования пассивных помех (МКПП) для импульсно-доплеровских радиолокационных станций (Фиг. 2, патент РФ №2734071, МПК G01S 13/89, 2006.01), учитывающий опыт предыдущих разработок. Способ МКПП содержит: блок отбора максимальных амплитуд в кластерах, блок суммирования признаков обнаружения в кластерах, блок формирования признаков сигнала, превысившего порог по шуму (СППШ), блок порога, блок критерия проверки информации о СППШ, блок аккумулирования признаков СППШ, блок хранения информации о СППШ, блок проверки информации о СППШ, блок корректировки информации о СППШ, блок критериев корректировки информации о СППШ, блок обнаружения ПП, на выходе которого будут признаки обнаруженных ПП, блок критериев обнаружения ПП, блок расширения стробов ПП, на выходе которого будут признаки расширения обнаруженных ПП.
Выберем рассмотренные устройства (Фиг.1, патент РФ №2736625, МПК G01S 7/292, 2006.01; Фиг. 2, патент РФ №2734071, МПК G01S 13/89, 2006.01) за прототипы, так как они являются наиболее близкими по технической сущности к заявленному устройству.
Раскрытие изобретения
Техническая проблема, на решение которой направлено заявляемое техническое изобретение, заключается в межобзорном картографировании НИП для импульсно-доплеровских радиолокационных станций.
Техническим результатом изобретения является:
- картографирование НИП в пространственных кластерах по дальности, азимуту и углу места;
- расширение кластеров НИП по дальности, азимуту и углу места;
- регулировка минимальных кластеров картографирования НИП в соответствии с пространственными кластерами, рассматриваемыми в отдельно взятой РЛС;
- возможность работы как при синхронном, так и асинхронном обзоре РЛС;
- определение границ НИП при картографировании;
- определение НИП на азимутальных направлениях;
- классификация НИП по ее параметрам;
- определение признаков наличия НИП до и после согласованной фильтрации;
- индифферентность к скорости и способу радиолокационного обзора при межобзорном картографировании НИП.
Указанный технический результат достигается в способе межобзорного картографирования несинхронных импульсных помех для импульсно-доплеровских радиолокационных станций (РЛС), заключающийся в том, что задают количество пространственных кластеров, для которых рассчитывают и хранят: признак наличия/отсутствия несинхронных импульсных помех (НИП), межобзорно аккумулированные признаки обнаружения НИП, номер цикла обзора, на котором сумма признаков обнаружения НИП была изменена, усредненное количество периодов, содержащих НИП, усредненное значение амплитуд полезного сигнала превышающих уровень собственных и внешних шумов, усредненное значение превышения амплитуды НИП над амплитудами полезного сигнала; далее комплексный сигнал, состоящий из синфазной и квадратурной составляющей, поступает для расчета модуля сигнала параллельно для двух случаев, один из которых включает в себя защиту от НИП, второй без защиты от НИП; на основе разницы модулей, полученных при наличии и отсутствии защиты от НИП формируют информации о НИП до согласованной фильтрации (СФ); далее комплексный сигнал после СФ поступает для расчета модуля сигнала параллельно для двух случаев, один из которых включает в себя защиту от НИП, второй без защиты от НИП; на основе разницы модулей, полученных при наличии и отсутствии защиты от НИП формируют информацию о НИП после СФ; после формирования информации о НИП до и после СФ для кластеров отбирают: элементы дальности с признаками наличия НИП, количество периодов, содержащих НИП в элементе разрешения по дальности; усредненное значение превышения амплитуды полезного сигнала над заранее рассчитанным значением собственных и внешних шумов; усредненное значение превышения амплитуды НИП над полезным сигналом; аккумулируют признаки наличия НИП в кластерах и изменяют номера циклов обзора в кластерах, которые соответствуют тому, когда были внесены последние изменения; значения аккумулированных признаков НИП проверяют на соответствие заданному диапазону; при превышении максимального значения, записывают максимальное значение, а при значении ниже минимально возможного, выбирают признак отсутствия НИП в кластере; проверяют информацию в кластерах, в которые не были внесены изменения в текущем цикле обзора изменяют номер цикла на текущий, а сумму признаков наличия НИП уменьшают на единицу; далее определяют признаки наличия НИП на азимутальных направлениях; осуществляют расширение признаков обнаружения НИП; по информации о НИП в кластерах проводят их классификацию; результатом рассмотренного способа являются признаки обнаружения НИП в кластерах; расширенные признаки обнаружения НИП в кластерах; классифицированная информация о НИП в кластерах; признаки наличия НИП на азимутальных направлениях.
Количество азимутальных направлений выбирают исходя из задач, поставленных перед РЛС.
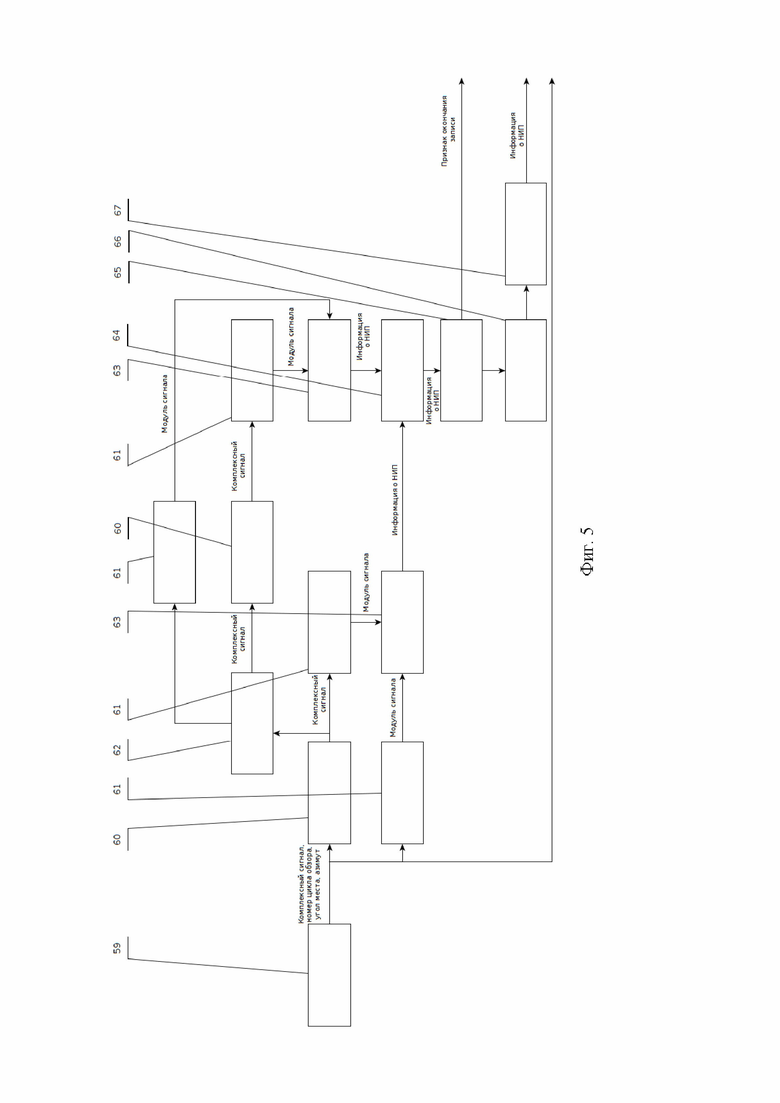
Технический результат достигается также в устройстве межобзорного картографирования несинхронных импульсных помех для импульсно-доплеровских РЛС, реализующее способ по п.1, и содержащее источники входных данных (59), передающие комплексный сигнал на первое устройство защиты от НИП (60) и первое устройство расчета модуля сигнала (61), а также передающие номер цикла обзора, угол места и азимут на устройство отбора информации о НИП (64), после чего комплексный сигнал, прошедший защиту от НИП поступает на второе устройство расчета модуля сигнала 61, а далее совместно с первым устройством расчета модуля сигнала 61 модули сигналов поступают на формирователь информации 63, а также комплексный сигнал после защиты от НИП поступает на устройство свертки сигнала (62), после чего параллельно передает комплексный сигнал на третье устройство расчета модуля сигнала (61) и второе устройство защиты от НИП (60), с которого комплексный сигнал поступает на четвертое устройство расчета модуля сигнала (61), а с него модуль сигнала и модулем сигнала с третьего устройства расчета модуля сигнала (61) поступают на второй формирователь информации о НИП (63), затем информация с первого и второго формирователя информации о НИП (63), а также признаки окончания записи поступают на устройство отбора информации о НИП (64), а потом информация о НИП, через блок записи информации о НИП (65) поступает на устройство хранения информации о НИП (66) и становится доступна для чтения на устройстве (67), кроме того с на блок логического элемента «И» (44) поступают признаки окончания записи, а на формирователь номера цикла обзора в кластерах, содержащих НИП (48), и на устройство отбора информации о НИП от УОВД (45) поступает номер цикла обзора, угол места, азимут, обрабатываемого сигнала, накопив на логическом элементе «И» (44) требуемое количество признаков окончания записи, передается сигнал запуска расчетов на устройство отбора информации о НИП от устройства обработки входных данных (УОВД) (45), которое считывает информацию о НИП от УОВД (67), а отобранную информацию о НИП передает на устройство усреднения количества периодов, содержащих НИП в кластерах (50), а также на устройство усреднения значений превышения амплитуды НИП над амплитудами полезного сигнала (57) и устройство усреднения значений амплитуд полезного сигнала, превышающих уровень собственных и внешних шумов (58), после чего информация о НИП через устройство записи поступает на устройство хранения информации о НИП (53), а также с устройства отбора информации о НИП (45) информация поступает на устройство аккумулирования признаков наличия/отсутствия НИП в кластерах (49) и на формирователь номера цикла обзора в кластерах, содержащих НИП (48), с помощью которого формируются критерии корректировки информации о НИП в кластерах (47), которые передаются на устройство корректировки информации о НИП в кластерах (46), совместно с поступлением на устройство аккумулирования признаков наличия/отсутствия НИП в кластерах (49), после чего откорректированная информация о НИП в кластерах через устройство записи (52) поступает в устройство хранения информации о НИП в кластерах (53), а затем, через блок чтения информации о НИП в кластерах (51) на выход межобзорного устройства картографирования НИП поступают признаки обнаружения НИП в кластерах, кроме того считанная информация о НИП передается на устройство расширения признаков обнаружения НИП в кластерах (54), а также на устройство классификации НИП в кластерах (55) и устройство определения признаков наличия НИП на азимутальных направлениях (56), с которых на выход межобзорного устройства картографирования поступят расширенные признаки обнаружения НИП в кластерах, классифицированная информация о НИП в кластерах, признаки наличия НИП в азимутальных направлениях.
Краткое описание чертежей
Фиг. 1 - Алгоритм используемого способа защиты эхо-сигналов от НИП в приемном канале РЛС содержит:
1 - блок расчета фазы;
2 - блок линейного детектора;
3 - блок упорядочивания амплитуд по возрастанию;
4 - блок компаратора;
5 - блок порога;
6 - блок логического объединения признаков по «И»;
7 - блок отбора упорядоченных амплитуд;
8 - блок умножения;
9 - блок изменения синфазной составляющей сигнала;
10 - блок изменения квадратурной составляющей сигнала;
11 - блок коэффициента флуктуации;
12 - блок мультиплексора.
Фиг. 2 - Алгоритм используемого способа межобзорного картографирования ПП для импульсно-доплеровских радиолокационных станций содержит:
13 - блок отбора максимальных амплитуд в кластерах;
14 - блок суммирования признаков обнаружения в кластерах;
15 - блок формирования признаков сигнала, превысившего порог по шуму (СППШ);
16 - блок порога;
17 - блок критерия проверки информации о СППШ;
18 - блок аккумулирования признаков СППШ;
19 - блок хранения информации о СППШ;
20 - блок проверки информации о СППШ;
21 - блок корректировки информации о СППШ;
22 - блок критериев корректировки информации о СППШ;
23 - блок обнаружения ПП, на выходе которого формируются признаки обнаруженных ПП;
24 - блок критериев обнаружения ПП;
25 - блок расширения стробов ПП, на выходе которого формируются признаки расширения обнаруженных ПП.
Фиг. 3 - Алгоритм предлагаемого способа межобзорного картографирования НИП для импульсно-доплеровских радиолокационных станций содержит:
26 - блок расчета модуля сигнала;
27 - блок защиты от НИП;
28 - блок рассчитанных значений собственных и внешних шумов;
29 - блок расчета свертки сигнала;
30 - блок формирования информации о защите от НИП;
31 - блок усреднения максимального количества периодов, содержащих НИП в кластерах;
32 - блок усреднения значения превышения амплитуды фона над собственными и внешними шумами в кластерах, содержащих НИП;
33 - блок усреднения значения превышения в кластерах амплитуды НИП над фоном;
34 - блок отбора информации о НИП;
35 - блок изменения номера цикла обзора в кластерах;
36 - блок аккумулирования признаков наличия НИП в кластерах;
37 - блок корректировки информации о НИП;
38 - блок критериев корректировки информации о НИП;
39 - блок расширения признаков НИП;
40 - блок классификации НИП в кластерах;
41 - блок определения признаков наличия НИП на азимутальных направлениях.
42 - блок хранения информации о НИП в кластерах;
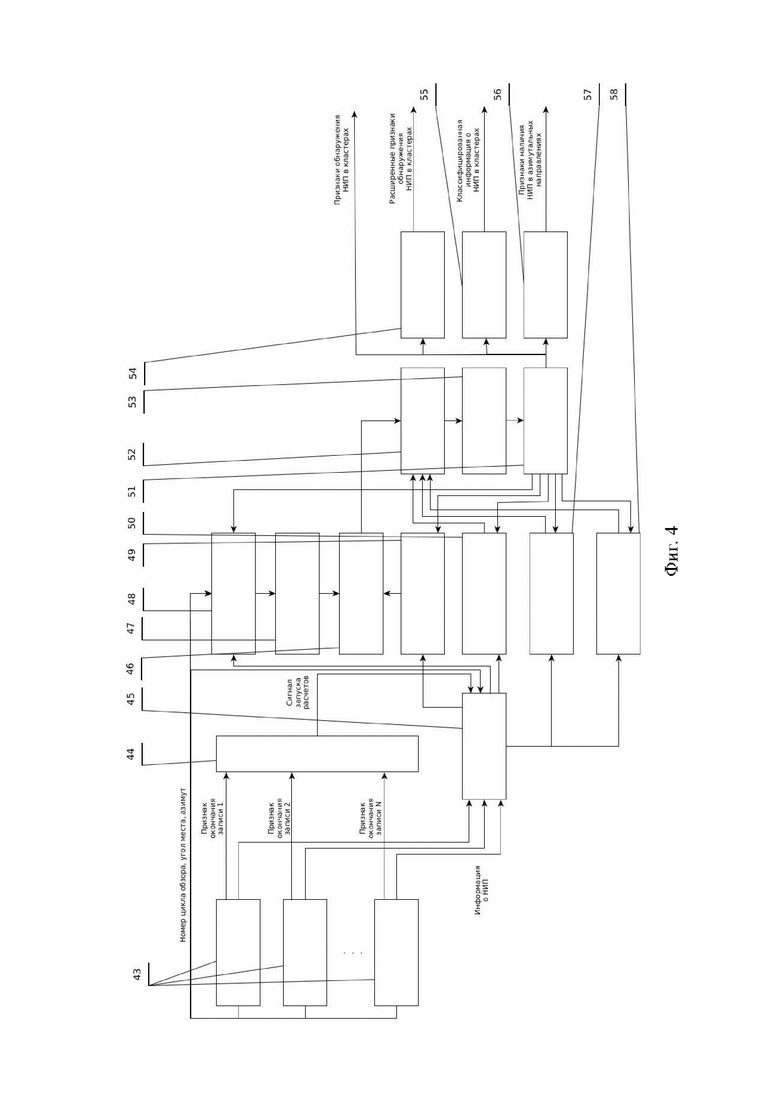
Фиг. 4 - Блок-схема заявленного устройства межобзорного картографирования НИП для импульсно-доплеровских радиолокационных станций содержит:
43 - устройства обработки входных данных (УОВД);
44 - логический элемент «И»;
45 - устройство отбора информации о НИП от УОВД;
46 - устройство корректировки информации о НИП в кластерах;
47 - формирователь критериев корректировки информации о НИП в кластерах;
48 - формирователь номера цикла обзора в кластерах, содержащих НИП;
49 - устройство аккумулирования признаков наличия/отсутствия НИП в кластерах;
50 - устройство усреднения количества периодов, содержащих НИП в кластерах;
51 - устройство чтения информации о НИП в кластерах;
52 - устройство записи информации о НИП в кластерах;
53 - устройство хранения информации о НИП в кластерах;
54 - устройство расширения признаков обнаружения НИП в кластерах;
55 - устройство классификации НИП в кластерах;
56 - устройство определения признаков наличия НИП на азимутальных направлениях;
57 - устройство усреднения значений превышения амплитуды НИП над амплитудами полезного сигнала;
58 - устройство усреднения значений амплитуд полезного сигнала, превышающих уровень собственных и внешних шумов.
Фиг. 5 - Блок-схема устройства обработки входных данных в предлагаемом устройстве межобзорного картографирования НИП для импульсно-доплеровских радиолокационных станций содержит:
59 - источник входных данных;
60 - устройства защиты от НИП;
61 - устройства расчета модуля сигнала;
62 - устройство свертки сигнала;
63 - формирователи информации о НИП;
64 - устройство отбора информации о НИП;
65 - устройство записи информации о НИП;
66 - устройство хранения информации о НИП;
67 - устройство чтения информации о НИП;
Работа заявленного устройства межобзорного картографирования НИП для импульсно-доплеровских радиолокационных станций заключается в следующем: во время процесса пространственного обзора необходимо картографировать НИП в кластерах, обновляя их каждый цикл обзора. В устройстве применяется защита от НИП до и после СФ, на основе которой происходит формирование информации о НИП в кластерах, включающей: межобзорно аккумулированные признаки наличия НИП; усредненное количество периодов, содержащих НИП; номер оборота, в котором произошло последнее изменение аккумулированного значения; признак наличия/отсутствия НИП; номер цикла обзора, на котором произошло последнее изменение информации о НИП; усредненное значение превышения амплитуды фона над заранее рассчитанным значением собственных и внешних шумов; усредненное значение превышения амплитуды НИП над фоном.
В заявленном устройстве, в случае использования одновременного (параллельного) обзора, как и в случае с последовательным обзором, количество параллельных лучей может быть любым, так как они являются лишь дополнительными источниками информации (см. Фиг. 4).
Алгоритм заявленного способа межобзорного картографирования НИП для импульсно-доплеровских РЛС представляет собой обработку пачечного комплексного сигнала  , состоящего из синфазной
, состоящего из синфазной  и квадратурной составляющей
и квадратурной составляющей  , с дополнительной информацией о его принадлежности к номеру цикла обзора, углу места, азимуту и включает следующие действия:
, с дополнительной информацией о его принадлежности к номеру цикла обзора, углу места, азимуту и включает следующие действия:
1. Вычисление модуля комплексного сигнала для каждого элемента разрешения по дальности в пачке импульсов:
 (1)
(1)
M - количество элементов по дальности,
T - количество периодов в пачке.
2. Выполнение защиты от НИП для  каждого элемента разрешения по дальности в пачке импульсов способом, представленным на фиг. 1 (патент на НИП РФ №2534030, МПК G01S 7/292, 2006), на выходе которого будет комплексный сигнал
каждого элемента разрешения по дальности в пачке импульсов способом, представленным на фиг. 1 (патент на НИП РФ №2534030, МПК G01S 7/292, 2006), на выходе которого будет комплексный сигнал  .
.
3. Вычисление модуля для комплексного сигнала после выполненной защиты от НИП для каждого элемента разрешения по дальности в пачке импульсов:
 (2)
(2)
4. Формирование информации о защите от НИП для каждого элемента разрешения по дальности в пачке импульсов, включающей: количество периодов  (3); межобзорный аккумулированный признак наличия НИП
(3); межобзорный аккумулированный признак наличия НИП  (4); значение превышения амплитуды фона над заранее рассчитанным значением собственных и внешних шумов
(4); значение превышения амплитуды фона над заранее рассчитанным значением собственных и внешних шумов  (5); значение превышения амплитуды НИП над фоном
(5); значение превышения амплитуды НИП над фоном  (6):
(6):
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
B - значение собственных и внешних шумов.
5. Вычисление свертки комплексного сигнала для каждого элемента разрешения по дальности в пачке импульсов:
 (7)
(7)
6. Вычисление модуля комплексного сигнала  после свертки для каждого элемента разрешения по дальности в пачке импульсов:
после свертки для каждого элемента разрешения по дальности в пачке импульсов:
 (8)
(8)
7. Выполнение защиты от НИП для  для каждого элемента разрешения по дальности в пачке импульсов способом, представленным на фиг. 1 (патент на НИП РФ №2534030, МПК G01S 7/292, 2006), на выходе которого будет комплексный сигнал
для каждого элемента разрешения по дальности в пачке импульсов способом, представленным на фиг. 1 (патент на НИП РФ №2534030, МПК G01S 7/292, 2006), на выходе которого будет комплексный сигнал  .
.
8. Вычисление модуля для каждого элемента разрешения по дальности в пачке импульсов для  после выполненной свертки и защиты от НИП:
после выполненной свертки и защиты от НИП:
 (9)
(9)
9. Формирование информации о защите от НИП после свертки для каждого элемента разрешения по дальности в пачке импульсов, включающей: количество периодов (10); межобзорный аккумулированный признак наличия НИП (11); значение превышения амплитуды фона над заранее рассчитанным значением собственных и внешних шумов (12); значение превышения амплитуды НИП над фоном (13):
 (10)
(10)
 (11)
(11)
 (12)
(12)
 (13)
(13)
10. Отбор НИП из кластера c наибольшим количеством попаданий в периоды пачки:
 (14)
(14)
где I - количество попаданий в кластер,
Y - количество кластеров по дальности,
A - количество кластеров по азимуту,
U - количество кластеров по углу места,
N - отобранный номер попадания в кластер с максимальным количеством периодов, содержащих НИП, в соответствии с индексацией по I,
n -индекс отобранных попаданий в кластер.
11. Отбор информации о НИП в кластере, включающей: значение превышения амплитуды НИП над фоном (15); максимальное количество периодов в пачке, содержащих НИП (16); межобзорный аккумулированный признак наличия НИП (17); значение превышения амплитуды фона над заранее рассчитанным значением собственных и внешних шумов (18):
 (15)
(15)
 (16)
(16)
 (17)
(17)
 (18)
(18)
12. Обновление информации о НИП в кластерах, включающей: усредненное значение превышения амплитуды НИП над фоном (19); усредненное количество периодов в пачке импульсов, содержащих НИП (20); усредненное значение превышения амплитуды фона над заранее рассчитанным значением собственных и внешних шумов (21):
 (19)
(19)
 (20)
(20)
 (21)
(21)
 - весовой коэффициент, влияющий на инертность обновления информации, чем больше коэффициент, тем больше влияние текущего значения выбранного параметра. Весовой коэффициент выбирается в зависимости от задач, поставленных перед РЛС и не превышает 1.
- весовой коэффициент, влияющий на инертность обновления информации, чем больше коэффициент, тем больше влияние текущего значения выбранного параметра. Весовой коэффициент выбирается в зависимости от задач, поставленных перед РЛС и не превышает 1.
13. Обновление информации о межобзорном аккумулировании признаков наличия НИП в кластерах:
 (22)
(22)
14. Изменение номера цикла обзора в кластерах:
 (23)
(23)
 - номер цикла обзора.
- номер цикла обзора.
15. Корректировка информации о межобзорном аккумулировании признаков наличия НИП в кластерах по допустимому интервалу накопления, зависящих от поставленных задач перед РЛС:
 (24)
(24)
 - минимальное значение межобзорного аккумулирования признака наличия НИП в кластере;
- минимальное значение межобзорного аккумулирования признака наличия НИП в кластере;
 - максимальное значение межобзорного аккумулирования признака наличия НИП в кластере.
- максимальное значение межобзорного аккумулирования признака наличия НИП в кластере.
16. Корректировка информации о межобзорном аккумулировании признаков наличия НИП в кластерах по текущему номеру обзора:
 (25)
(25)
17. Корректировка номера цикла обзора в кластерах:
 (26)
(26)
18. Корректировка признака наличия/отсутствия НИП в кластерах:
 (27)
(27)
19. Расширение признаков обнаружения НИП:
 (28)
(28)
20. Определение признаков наличия НИП на азимутальных направлениях:
 (29)
(29)
21. Классификация НИП в кластерах, включающая информацию: признак подавления НИП до собственных и внешних шумов (30); усредненное значение превышения амплитуды НИП над фоном  ; усредненное количество периодов в пачке, содержащих НИП
; усредненное количество периодов в пачке, содержащих НИП  ; признак постоянства обнаружения НИП (31):
; признак постоянства обнаружения НИП (31):
 (30)
(30)
 (31)
(31)
 - параметр для определения подавления НИП в кластере до уровня собственных и внешних шумов, выбирается в зависимости от поставленных перед РЛС задач, например,
- параметр для определения подавления НИП в кластере до уровня собственных и внешних шумов, выбирается в зависимости от поставленных перед РЛС задач, например,  ;
;
 - верхняя и нижняя граница для признака обнаружения НИП в кластере, при
- верхняя и нижняя граница для признака обнаружения НИП в кластере, при  признак непостоянного присутствия; при
признак непостоянного присутствия; при  признак отсутствия; при
признак отсутствия; при  признак постоянного присутствия. При этом
признак постоянного присутствия. При этом  , а
, а  .
.
В результате применения описанного алгоритма, за счет:
- применения защиты от НИП до и после СФ;
- контроля признака наличия НИП в кластерах с помощью счетчика цикла обзора;
- проверки изменений межобзорного аккумулированного признака наличия НИП в кластерах в текущем цикле обзора, с учетом минимального и максимального возможных значений;
- обнаружения признаков НИП в кластерах;
- расширения признаков обнаружения НИП в кластерах;
- классификации НИП в кластерах;
- определения признаков наличия НИП на азимутальных направлениях;
происходит межобзорное картографирование НИП по дальности, азимуту и углу места в импульсно-доплеровских радиолокационных станциях, как в режиме синхронного радиолокационного обзора, так и в асинхронном режиме, и достигается технический результат изобретения.
Необходимо указать, что предлагаемый алгоритм предоставляет: возможность определения границ НИП при картографировании; признаков наличия НИП на азимутальных направлениях; классифицированную информацию о НИП в кластерах.
Предлагаемый вариант нового устройства межобзорного картографирования НИП для импульсно-доплеровских радиолокационных станций содержит источники входных данных 59, передающие комплексный сигнал на устройство защиты от НИП 60 и устройство расчета модуля сигнала 61, а также передающие номер цикла обзора, угол места и азимут на устройство отбора информации о НИП 64, после чего комплексный сигнал, прошедший защиту от НИП 60 поступает на устройство расчета модуля сигнала 61, а далее совместно с аналогичным устройством 61 модули сигналов поступают на формирователь информации 63, а также комплексный сигнал после защиты от НИП 60 поступает на устройство свертки сигнала 62, после чего параллельно передает комплексный сигнал на устройство расчета модуля сигнала 61 и устройство защиты от НИП 60, с которого комплексный сигнал поступает на устройство расчета модуля сигнала 61, а с него модуль сигнала и модулем сигнала с другого устройства расчета модуля сигнала 61 поступают на формирователь информации о НИП 63, после этого информация о НИП от двух формирователей информации о НИП 63, а потом информация о НИП, через блок записи информации о НИП 65 поступает на устройство хранения информации о НИП 66 и доступно для чтения устройству 67, кроме того с УОВД (43) на блок логического элемента «И» 44 поступают признаки окончания записи, а на формирователь номера цикла обзора в кластерах, содержащих НИП 48, и на устройство отбора информации о НИП от УОВД 45 поступает номер цикла обзора, угол места, азимут, обрабатываемого сигнала, в случае появления на логическом элементе «И» 44 требуемого количества признаков окончания записи, передаваемых с блоков УОВД 43 и в соответствии с используемым количеством блоков УОВД для конкретного случая, будет соответствующее количество этих признаков, передается сигнал запуска расчетов на устройство отбора информации о НИП от УОВД 45, которое считывает информацию о НИП от УОВД 67, а отобранную информацию о НИП передает на устройство усреднения количества периодов, содержащих НИП в кластерах 50, а также на устройство усреднения значений амплитуд НИП над амплитудами полезного сигнала 57 и устройство усреднения значений амплитуд полезного сигнала, превышающих уровень собственных и внешних шумов, 58, после чего информация о НИП через устройство записи поступает на устройство хранения информации о НИП 53, а также с устройства отбора информации о НИП 45 информация о НИП поступает на устройство аккумулирования признаков наличия/отсутствия НИП в кластерах 49 и на формирователь номера цикла обзора в кластерах, содержащих НИП 48, с помощью которого формируются критерии корректировки информации о НИП в кластерах 47, а далее происходит передача критериев корректировки на устройство корректировки информации о НИП в кластерах 46, совместно с поступлением на устройство аккумулированных признаков наличия/отсутствия НИП в кластерах с устройства 49, после чего откорректированная информация о НИП в кластерах через устройство записи 53 поступает в устройство хранения информации о НИП в кластерах, а затем, через блок чтения информации о НИП в кластерах 51 на выход межобзорного устройства картографирования НИП поступают признаки обнаружения НИП в кластерах, кроме того считанная информация о НИП устройством 51 передается на устройство расширения признаков обнаружения НИП в кластерах 54, устройство классификации НИП в кластерах 55, устройство определения признаков наличия НИП на азимутальных направлениях 56, с которых на выход межобзорного устройства картографирования поступят расширенные признаки обнаружения НИП в кластерах, классифицированная информация о НИП в кластерах, признаки наличия НИП в азимутальных направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Межобзорное устройство картографирования пассивных помех для импульсно-доплеровских радиолокационных станций и способ его осуществления | 2020 |
|
RU2734071C1 |
| Устройство автоматической защиты импульсно-доплеровских радиолокационных станций от пассивных помех и способ его осуществления | 2021 |
|
RU2762375C1 |
| СПОСОБ НЕКОГЕРЕНТНОГО ЭКСТРЕМАЛЬНОГО НАКОПЛЕНИЯ-ОБНАРУЖЕНИЯ СИГНАЛА В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2019 |
|
RU2694809C1 |
| Способ защиты эхо-сигналов от несинхронных импульсных помех в приемном канале радиолокационных станций и устройство для его осуществления | 2020 |
|
RU2736625C1 |
| МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПАССИВНЫХ ПОМЕХ ПРИ ИСПОЛЬЗОВАНИИ ЛЧМ СИГНАЛОВ | 2012 |
|
RU2510863C1 |
| МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПОМЕХ | 1985 |
|
RU2040802C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| Способ определения скорости и направления движения наземных объектов бортовой радиолокационной станцией с антенной решеткой | 2021 |
|
RU2786678C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ ПАССИВНОГО РАДИОМОНИТОРИНГА ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2440588C1 |

Заявленная группа изобретений относится к области радиолокации и может быть использована для защиты от несинхронных импульсных помех (НИП), с целью улучшения характеристик обнаружения полезного эхосигнала. Техническим результатом изобретения является обеспечение возможности картографирования НИП в пространственных расширенных кластерах по дальности, азимуту и углу места работы как при синхронном, так и асинхронном обзоре РЛС и классификации НИП при индифферентности к скорости и способу радиолокационного обзора при межобзорном картографировании НИП. В заявленном способе задают количество пространственных кластеров, для которых рассчитывают и хранят: признак наличия/отсутствия НИП, межобзорно аккумулированные признаки обнаружения НИП, номер цикла обзора, на котором сумма признаков обнаружения НИП была изменена, усредненное количество периодов, содержащих НИП, усредненное значение превышения амплитуды полезного сигнала над заранее рассчитанным значением собственных и внешних шумов, усредненное значение превышения амплитуды НИП над полезным сигналом. Далее определяют модуль сигнала до и после согласованной фильтрации (СФ) как при обеспечении защиты от НИП, так и без нее. На основе разницы полученных модулей сигнала формируют информацию о НИП до и после СФ, после чего происходит отбор информации о НИП: элементы разрешения по дальности с признаками наличия НИП, количество периодов, содержащих НИП в элементе разрешения по дальности; усредненное значение превышения амплитуды полезного сигнала над заранее рассчитанным значением собственных и внешних шумов; усредненное значение превышения амплитуды НИП над полезным сигналом. Аккумулируются признаки наличия НИП в кластерах и изменяются номера циклов обзора в кластерах, которые соответствуют тому, когда были внесены последние изменения. Значения аккумулированных признаков НИП проверяются и лежат в заданном интервале. При превышении максимального значения последнее записывается. При значении ниже минимально возможного выбирается признак отсутствия НИП в кластере. Затем проверяется информация в кластерах, в которые не были внесены изменения в текущем цикле обзора, например, из-за асинхронного обзора. Изменяется номер цикла на текущий, а сумма признаков наличия НИП уменьшается на единицу. Определяются признаки наличия НИП на азимутальных направлениях. После чего происходит расширение признаков обнаружения НИП, а по информации о НИП в кластерах проводится их классификация. Результатом на выходе рассмотренного изобретения будут: признаки обнаружения НИП в кластерах; расширенные признаки обнаружения НИП в кластерах; классифицированная информация о НИП в кластерах; признаки наличия НИП в азимутальных направлениях. 2 н. и 2 з.п. ф-лы, 5 ил.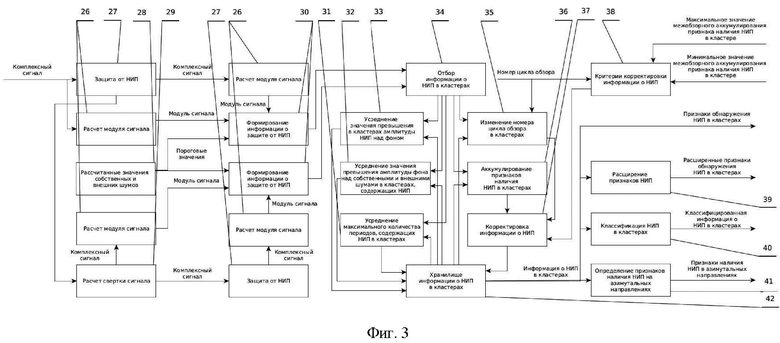
1. Способ межобзорного картографирования несинхронных импульсных помех для импульсно-доплеровских радиолокационных станций (РЛС), заключающийся в том, что задают количество пространственных кластеров, для которых рассчитывают и хранят:
признак наличия/отсутствия несинхронных импульсных помех (НИП),
межобзорно аккумулированные признаки обнаружения НИП,
номер цикла обзора, на котором сумма признаков обнаружения НИП была изменена,
усредненное количество периодов, содержащих НИП,
усредненное значение амплитуд полезного сигнала, превышающих уровень собственных и внешних шумов,
усредненное значение превышения амплитуды НИП над амплитудами полезного сигнала;
далее комплексный сигнал, состоящий из синфазной и квадратурной составляющих, поступает для расчета модуля сигнала параллельно для двух случаев, один из которых включает в себя защиту от НИП, второй без защиты от НИП;
на основе разницы модулей, полученных при наличии и отсутствии защиты от НИП, формируют информации о НИП до согласованной фильтрации (СФ);
далее комплексный сигнал после СФ поступает для расчета модуля сигнала параллельно для двух случаев, один из которых включает в себя защиту от НИП, второй без защиты от НИП;
на основе разницы модулей, полученных при наличии и отсутствии защиты от НИП, формируют информацию о НИП после СФ;
после формирования информации о НИП до и после СФ для кластеров отбирают: элементы дальности с признаками наличия НИП, количество периодов, содержащих НИП в элементе разрешения по дальности; усредненное значение превышения амплитуды полезного сигнала над заранее рассчитанным значением собственных и внешних шумов; усредненное значение превышения амплитуды НИП над полезным сигналом;
аккумулируют признаки наличия НИП в кластерах и изменяют номера циклов обзора в кластерах, которые соответствуют тому, когда были внесены последние изменения;
значения аккумулированных признаков НИП проверяют на соответствие заданному диапазону;
при превышении максимального значения записывают максимальное значение, а при значении ниже минимально возможного выбирают признак отсутствия НИП в кластере;
проверяют информацию в кластерах, в которые не были внесены изменения в текущем цикле обзора;
изменяют номер цикла на текущий, а сумму признаков наличия НИП уменьшают на единицу;
далее определяют признаки наличия НИП на азимутальных направлениях;
осуществляют расширение признаков обнаружения НИП;
по информации о НИП в кластерах проводят их классификацию;
результатом рассмотренного способа являются признаки обнаружения НИП в кластерах; расширенные признаки обнаружения НИП в кластерах; классифицированная информация о НИП в кластерах; признаки наличия НИП на азимутальных направлениях.
2. Способ по п. 1, отличающийся тем, что количество азимутальных направлений выбирают исходя из задач, поставленных перед РЛС.
3. Способ по п. 1, отличающийся тем, что информация в кластерах, в которые не были внесены изменения в текущем цикле обзора, происходит вследствие асинхронного обзора.
4. Устройство межобзорного картографирования несинхронных импульсных помех для импульсно-доплеровских РЛС, реализующее способ по п. 1 и содержащее источники входных данных (59), передающие комплексный сигнал на первое устройство защиты от НИП (60) и первое устройство расчета модуля сигнала (61), а также передающие номер цикла обзора, угол места и азимут на устройство отбора информации о НИП (64), после чего комплексный сигнал, прошедший защиту от НИП, поступает на второе устройство расчета модуля сигнала (61), а далее совместно с первым устройством расчета модуля сигнала (61) модули сигналов поступают на формирователь информации (63), а также комплексный сигнал после защиты от НИП поступает на устройство свертки сигнала (62), после чего параллельно передает комплексный сигнал на третье устройство расчета модуля сигнала (61) и второе устройство защиты от НИП (60), с которого комплексный сигнал поступает на четвертое устройство расчета модуля сигнала (61), а с него модуль сигнала совместно с сигналом запуска расчета и модулем сигнала с третьего устройства расчета модуля сигнала (61) поступают на второй формирователь информации о НИП (63), затем информация с первого и второго формирователей информации о НИП (63), а потом информация о НИП через блок записи информации о НИП (65) поступает на устройство хранения информации о НИП (66) и становится доступна для чтения на устройстве (67), кроме того, с устройства обработки входных данных (УОВД) (43) на логический элемент «И» (44) поступают признаки окончания записи, а на формирователь номера цикла обзора в кластерах, содержащих НИП (48), и на устройство отбора информации о НИП от УОВД (45) поступает номер цикла обзора, угол места, азимут обрабатываемого сигнала, накопив на логическом элементе «И» (44) требуемое количество признаков окончания записи, передается сигнал запуска расчетов на устройство отбора информации о НИП от устройства отбора информации о НИП от УОВД (45), которое считывает информацию о НИП от УОВД (67), а отобранную информацию о НИП передает на устройство усреднения количества периодов, содержащих НИП в кластерах (50), а также на устройство усреднения значений превышения амплитуды НИП над амплитудами полезного сигнала (57) и устройство усреднения значений амплитуд полезного сигнала, превышающих уровень собственных и внешних шумов (58), после чего информация о НИП через устройство записи поступает на устройство хранения информации о НИП (53), а также с устройства отбора информации о НИП (45) информация поступает на устройство аккумулирования признаков наличия/отсутствия НИП в кластерах (49) и на формирователь номера цикла обзора в кластерах, содержащих НИП (48), с помощью которого формируются критерии корректировки информации о НИП в кластерах (47), которые передаются на устройство корректировки информации о НИП в кластерах (46), совместно с поступлением на устройство аккумулирования признаков наличия/отсутствия НИП в кластерах (49), после чего откорректированная информация о НИП в кластерах через устройство записи (52) поступает в устройство хранения информации о НИП в кластерах (53), а затем через блок чтения информации о НИП в кластерах (51) на выход межобзорного устройства картографирования НИП поступают признаки обнаружения НИП в кластерах, кроме того, считанная информация о НИП передается на устройство расширения признаков обнаружения НИП в кластерах (54), а также на устройство классификации НИП в кластерах (55) и устройство определения признаков наличия НИП на азимутальных направлениях (56), с которых на выход межобзорного устройства картографирования поступят расширенные признаки обнаружения НИП в кластерах, классифицированная информация о НИП в кластерах, признаки наличия НИП в азимутальных направлениях.

