Область техники, к которой относится изобретение
Изобретение относится к области радиолокации и может быть использовано в импульсно-доплеровских радиолокационных станциях (РЛС) для защиты от пассивных помех (ПП).
Уровень техники
Защита от ПП является одной из важнейших задач направленной на улучшение характеристик обнаружения и точностных характеристик РЛС. Наличие ПП ухудшает отношение сигнала к аддитивной смеси помехи с шумом, что приводит к его маскированию и пропуску. А также, при обработке эхо-сигнала неподавленные ПП увеличивают вероятность ложного обнаружения на выходе порогового устройства. Поэтому для уменьшения влияния ПП на характеристики обнаружения в РЛС применяются специализированные устройства защиты.
Из уровня техники широко известен способ защиты РЛС от ПП основанный на череспериодной компенсации (ЧПК) принятых сигналов («Теоретические основы радиолокации». /Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970, с. 467, а также рассмотренный в «Теоретические основы радиолокации». /Под ред. В.Е. Дулевича. - М., Сов. Радио, 1978, с. 463, 469). Уменьшение количества обнаружений ПП достигается за счет излучения в направлении зоны обзора не менее двух импульсов и последующего вычитания отраженных сигналов. Однако, назначение на области пространства с наличием ПП межимпульсной обработки с достаточно широкой зоной режекции приводит к увеличению «слепых» по скорости зон, что может привести к значительному ослаблению спектральных составляющих полезного эхо-сигнала и ухудшению характеристик его обнаружения. Поэтому назначение защиты от ПП следуют применять только к тем областям пространства, в которых были выявлены мешающие отражения.
Другой способ защиты от ПП, заключается в исключении (бланкировании) областей обрабатываемого сигнала с повышенной концентрацией обнаруженных отметок (Ангельский Р.Д., Шестов И.В. Отечественные зенитные ракетные комплексы: Иллюстрированный справочник/ Р.Д. Ангельский. - М.: ООО «Издательство Астрель»: ООО «Издательство АСТ», 2002. - 256 с.: ил. - (Военная техника). Недостатком такого способа является высокая вероятность пропуска сигналов, отраженных от целей. Это объясняется тем, что в процессе бланкирования исключаются как ПП, так и сигналы от целей, оказавшиеся в пределах границ области бланкирования.
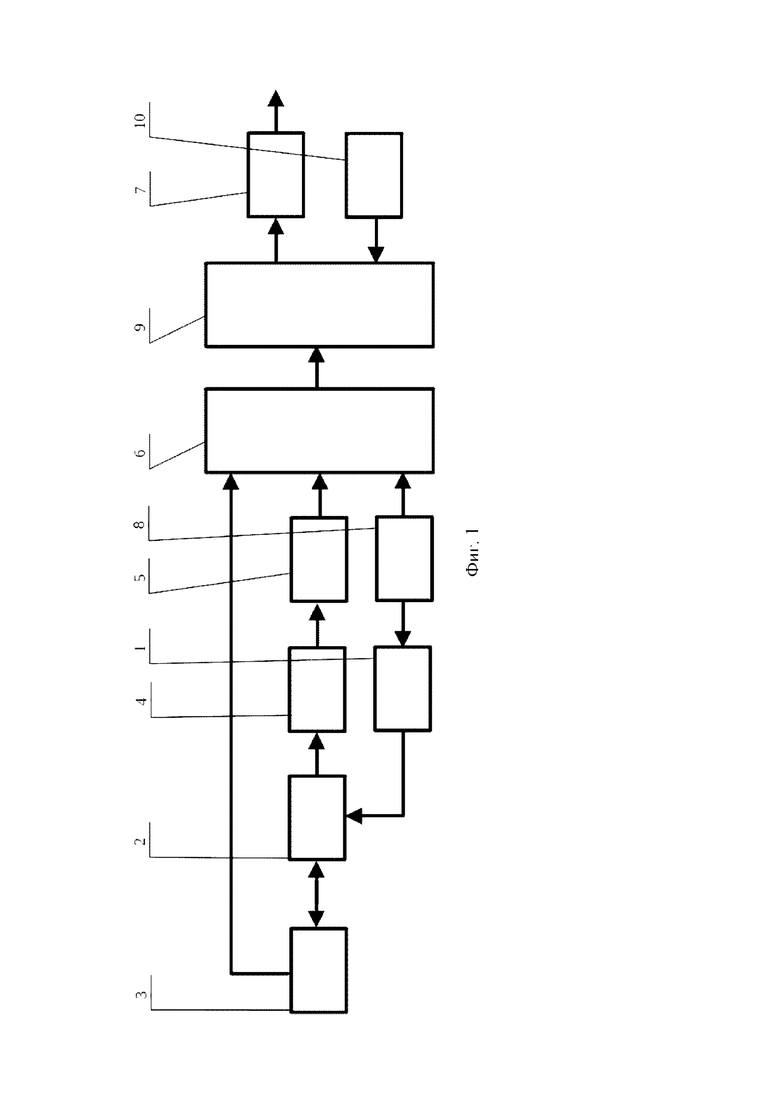
Наиболее близким к заявленному является способ защиты от ПП (патент РФ №2584696, МПК G01S 7/36, 2006.01), который осуществляется с помощью заявляемой РЛС, которая содержит (фиг. 1) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, блок вычисления дальности 6, блок подавления пассивных помех 7, синхронизатор 8, блок оценки количества превышений порога обнаружения 9, запоминающее устройство пороговой дальности 10. Способ схож с предыдущим вариантом, но в нем предотвращено бланкирование целей с заранее определенной эффективной площадью рассеяния ЭПР, на выбранной дистанции. Однако недостатками такого способа является:
- снижение защиты от ПП при расширении списка целей, требуемых для обнаружения на выбранных дистанциях. Например, к таким целям можно отнести беспилотные летательные аппараты с малым ЭПР, которые в настоящее время получили широкое применение, вследствие чего возникает необходимость их обнаружения с помощью средств радиолокации. Кроме того, исходя из описанного алгоритма защиты от ПП, любой тип цели, внесенный в список приоритета обнаружения, будет снижать защиту от ПП в РЛС:
- пропуск полезного сигнала, попавшего в область бланкирования;
- потребность в подтверждении оператором результатов работы алгоритмов защиты от ПП, приходящих от электронной вычислительной машины (ЭВМ).
Раскрытие изобретения
Техническая проблема, на решение которой направлено заявляемое техническое изобретение, заключается в автоматическом назначении защиты от ПП в импульсно-доплеровских радиолокационных станциях.
Техническими результатами изобретения является:
- автоматическое назначение защиты от ПП с применением алгоритмов селекции движущихся целей;
- назначение защиты на элементы пространства, пораженные ПП (под элементами пространства подразумеваются кластеры, соответствующие интервалам по дальности, азимуту и углу места);
- возможность работы как при синхронном, так и асинхронном обзоре;
- возможность предотвратить ошибочное классифицирование в кластерах сигнала от одиночных или близкорасположенных объектов с доплеровским сдвигом частоты, как ПП;
- индифферентность к скорости и способу радиолокационного обзора при межобзорном картографировании ПП.
Указанные технические результаты обеспечиваются способом автоматического назначения защиты от пассивных помех (ПП) для импульсно-доплеровских радиолокационных станциях (РЛС), заключающийся в том, что: хранят признаки обнаружения наличия/отсутствия сигнала после дополнительной межпериодной обработки (ДМПО) и базовой межпериодной обработки (БМПО), поступающие с устройства обработки входных данных; задают количество пространственных кластеров, для которых рассчитывают и хранят: сумму признаков обнаружения сигнала, превысившего порог по шуму (СППШ); номер цикла обзора, на котором сумма признаков обнаружения СППШ была изменена; амплитуды сигналов после межпериодной обработки, для текущего цикла обзора; максимальные амплитуды после межпериодной обработки, для текущего цикла обзора; признаки обнаружения точечных объектов с доплеровским сдвигом частоты после межпериодной обработки, коэффициентов режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО; далее максимальные амплитуды в кластерах используют для выделения ПП из внешних и собственных шумов путем сравнения с пороговыми значениями и формированием признаков превышения; после формирования признаков превышения над пороговыми значениями и признаков обнаружения точечных объектов с доплеровским сдвигом частоты аккумулируют признаки СППШ и изменяют номера циклов обзора в кластерах, значения аккумулированных признаков СППШ проверяют, что значения лежат в заданных интервалах; проверяют информацию в кластерах, в которые не были внесены изменения, изменяют номер цикла на текущий, а сумму признаков СППШ уменьшают на единицу; накопленные значения суммы признаков СППШ сравнивают с критерием обнаружения ПП, получая обнаружение ПП в кластерах; расширяют стробы обнаруженных ПП, в результате чего формируют стробы ПП, признаки их расширения и признаки обнаруженных точечных объектов с доплеровским сдвигом частоты; отбирают номера межпериодной обработки (МПО) для кластеров, по коэффициентам режекции сигналов после ДМПО относительно БМПО, в соответствии с которыми происходит назначение защиты от ПП и отбор признаков наличия/отсутствия обнаруженных сигналов.
Указанные технические результаты достигаются также в устройстве автоматического назначения защиты от ПП для импульсно-доплеровских РЛС, реализующее указанный способ, и содержащее устройства обработки входных данных (УОВД), являющиеся источниками исходных данных для устройства отбора максимальных амплитуд в кластерах, для устройства суммирования признаков обнаружения в кластерах, для устройства отбора коэффициентов режекции сигнала в кластерах по результатам ДМПО относительно БМПО, для формирователя объединенных признаков обнаружения после ДМПО и БМПО, для устройства назначения номера МПО для кластеров, для логического элемента «И», который объединяет признаки окончаний записи данных и после чего передает сигнал запуска очистки признаков обнаруженных ПП и сигнал запуска расчета информации на устройство отбора максимальных амплитуд в кластерах и устройство суммирования признаков обнаружения в кластерах, после расчета данные отправляются для последующей записи в хранилище информации о кластерах, через устройство записи информации о кластерах в устройство хранения информации о кластерах, а также номера элементов с максимальными амплитудами в кластерах после БМПО передаются в устройства отбора коэффициентов режекции сигнала в кластерах по результатам ДМПО относительно БМПО, где формируются признаки окончания записи для логического элемента «И» и отобранные коэффициенты режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО для последующей записи в хранилище информации о кластерах, устройство записи информации о кластерах в устройство хранения информации о кластерах, в устройстве хранения информации о кластерах выдается соответствующий признак на устройство суммирования циклов обзора, устройство записи количества циклов обзора передается на устройство хранения информации о СППШ и на устройство критерия проверки информации о СППШ, после чего выдается признак окончания записи на устройство чтения информации о кластерах, который передает данные на устройство формирования признаков СППШ, куда также поступает информация о пороге с порогового устройства, данные значения сравниваются, определяя наличие СППШ в кластерах, после чего сформированные признаки аккумулируются в устройстве аккумулирования признаков СППШ, корректируются в устройстве корректировки информации о СППШ с учетом критериев с формирователя критериев корректировки информации о СППШ и записываются через устройство записи информации о СППШ в устройство хранения информации о СППШ, а также с формирователя признаков СППШ передается сигнал для считывания информации о кластерах устройством для чтения информации о кластерах и передачи коэффициентов режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО на устройство хранения информации о СППШ, через устройство записи информации о СППШ, а затем информация о СППШ считывается и передается устройством чтения информации о СППШ на формирователь признаков обнаружения ПП, с формирователя критериев обнаружения ПП и передаются в устройство хранения признаков обнаруженных ПП через устройство записи признаков, обнаруженных ПП, далее устройство чтения признаков обнаруженных ПП передает признаки на устройство расширения стробов ПП, на выходе которого будут сформированы признаки обнаруженных ПП и признаки расширения обнаруженных ПП, поступающие на устройство назначения номера МПО для кластеров, в то же время происходит считывание устройством чтения информации о СППШ коэффициентов режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО с устройства хранения информации о СППШ и их передача на устройство выбора номеров ДМПО для кластеров при наличии ПП, с которого на устройство назначения номера МПО для кластеров поступают отобранные номера ДМПО и сигнал запуска выбора МПО, после этого устройство отбора обнаруженных отметок в кластерах на основе признаков обнаружения сигналов после МПО с формирователя объединенных признаков обнаружения после ДМПО и БМПО и номеров МПО, назначаемых в кластерах, с устройства назначения номера МПО для кластеров выбирает признаки обнаружения сигнала и номеров МПО, назначаемых в кластерах, выбирает признаки обнаружения сигнала.
Краткое описание чертежей
Фиг. 1 – Блок-схема используемого устройства защиты от ПП содержит:
1 – передатчик;
2 – антенный переключатель;
3 – антенна;
4 – приемник;
5 – пороговое устройство;
6 – блок вычисления дальности;
7 – блок подавления пассивных помех;
8 – синхронизатор;
9 – блок оценки количества превышений порога обнаружения;
10 – запоминающее устройство пороговой дальности.
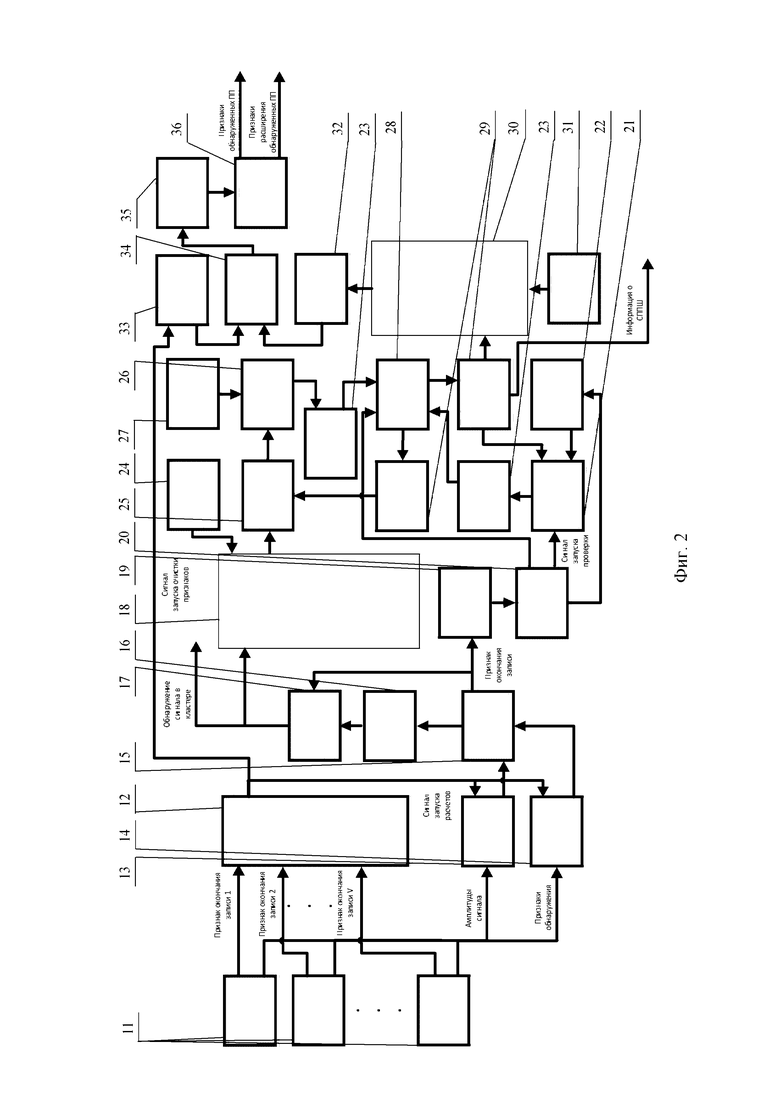
Фиг. 2 – Блок-схема используемого устройства межобзорного картографирования ПП (МКПП) для импульсно-доплеровских радиолокационных станций содержит:
11 – устройство обработки входных данных (УОВД);
12 – логический элемент «И»;
13 – устройство отбора максимальных амплитуд в кластерах;
14 – устройство суммирования признаков обнаружения в кластерах;
15 – устройство записи информации о кластерах;
16 – устройство хранения информации о кластерах;
17 – устройство чтения информации о кластерах;
18 – формирователь признаков сигнала, превысившего порог по шуму (СППШ);
19 – устройство суммирования циклов обзора;
20 – устройство записи количества циклов обзора;
21 – устройство проверки информации о СППШ;
22 – формирователь критерия проверки информации о СППШ;
23 – устройство записи информации о СППШ;
24 – пороговое устройство;
25 – устройство аккумулирования признаков СППШ;
26 – устройство корректировки информации о СППШ;
27 – формирователь критериев корректировки информации о СППШ;
28 – устройство хранения информации о СППШ;
29 – устройство чтения информации о СППШ;
30 – формирователь признаков обнаружения ПП;
31 – формирователь критериев обнаружения ПП;
32 – устройство записи признаков обнаруженных ПП;
33 – устройство удаления признаков обнаруженных ПП;
34 – устройство хранения признаков обнаруженных ПП;
35 – устройство чтения признаков обнаруженных ПП;
36 – устройство расширения стробов ПП, на выходе которого формируются признаки обнаруженных ПП и признаки расширения обнаруженных ПП.
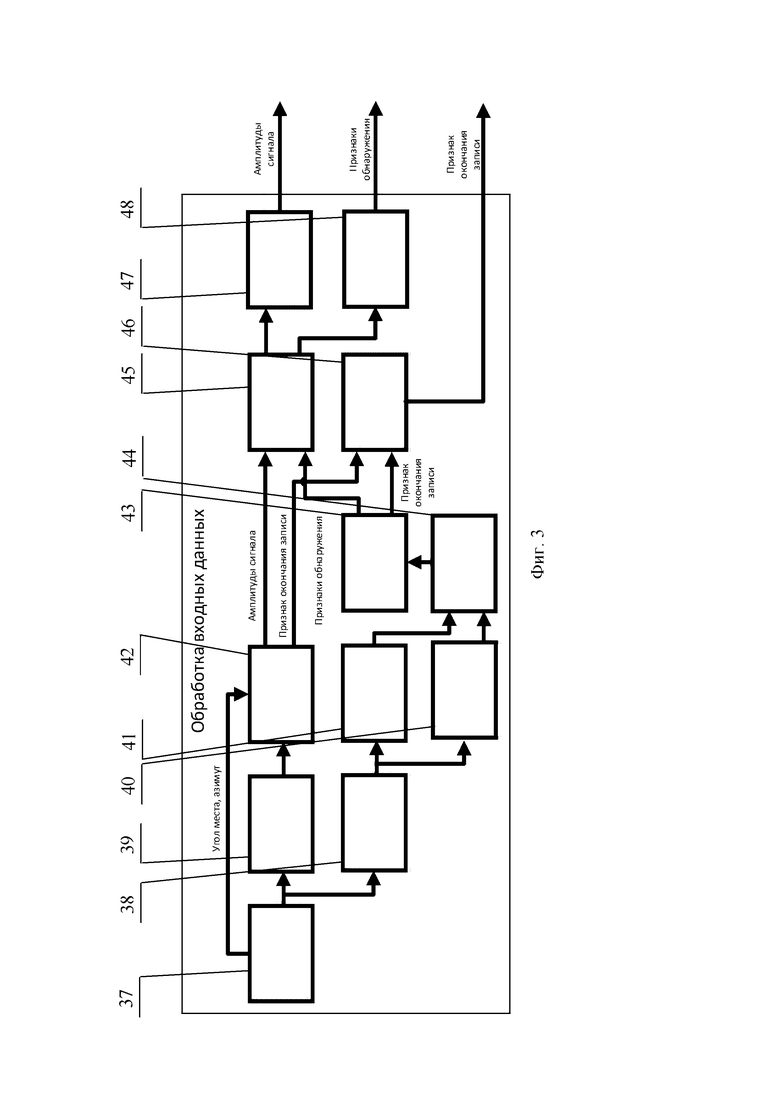
Фиг. 3 – Блок-схема используемого УОВД содержит:
37 – источник информации;
38 – устройство межпериодной обработки информации 2;
39 – устройство межпериодной обработки информации 1;
40 – пороговое устройство 2;
41 – пороговое устройство 1;
42 – устройство записи амплитуд сигнала;
43 – устройство записи признаков обнаружения;
44, 45 – логический элемент «и»;
46 – устройство хранения информации;
47 – устройство чтения информации об амплитудах, на выходе которого будут амплитуды сигнала;
48 – устройство чтения информации о признаках обнаружения, с выхода которого передаются признаки обнаруженных ПП.
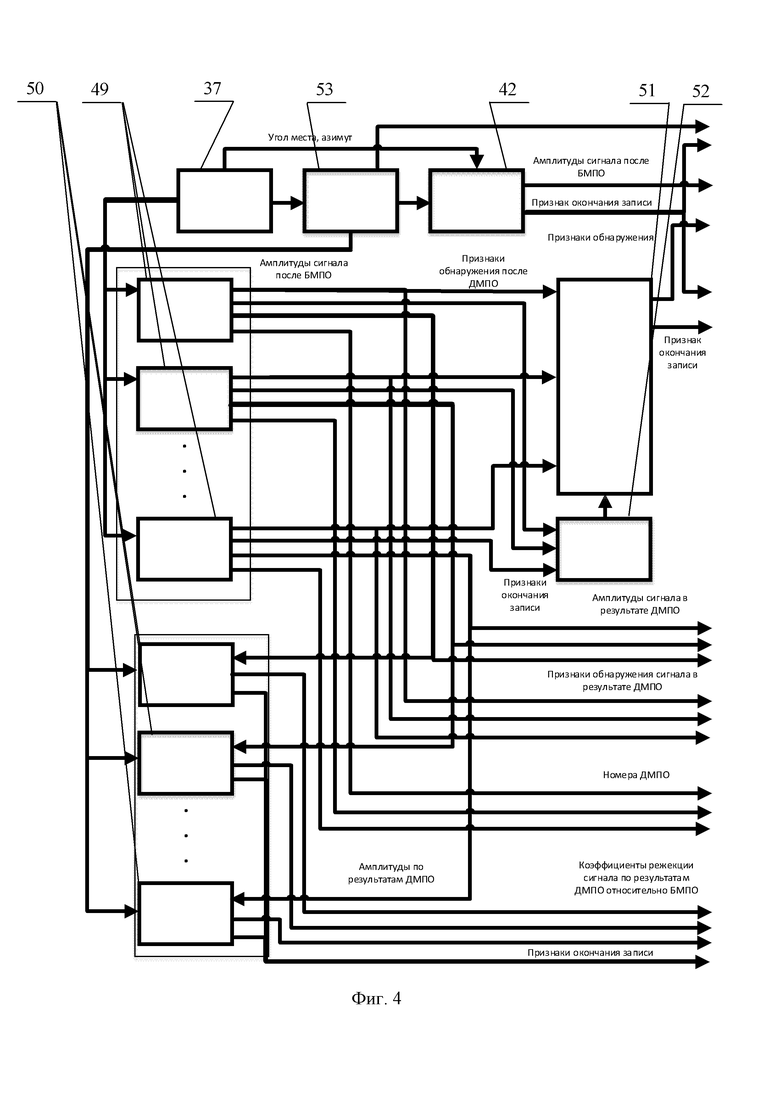
Фиг. 4 – Блок-схема предлагаемого УОВД (часть 1) содержит:
37 – источник информации;
42 – устройство записи амплитуд сигнала;
49 – устройство дополнительной межпериодной обработки (ДМПО);
50 – устройство расчета коэффициентов режекции сигнала по результатам дополнительной МПО;
51 – логический элемент «ИЛИ»;
52 – логический элемент «И»;
53 – устройство базовой МПО.
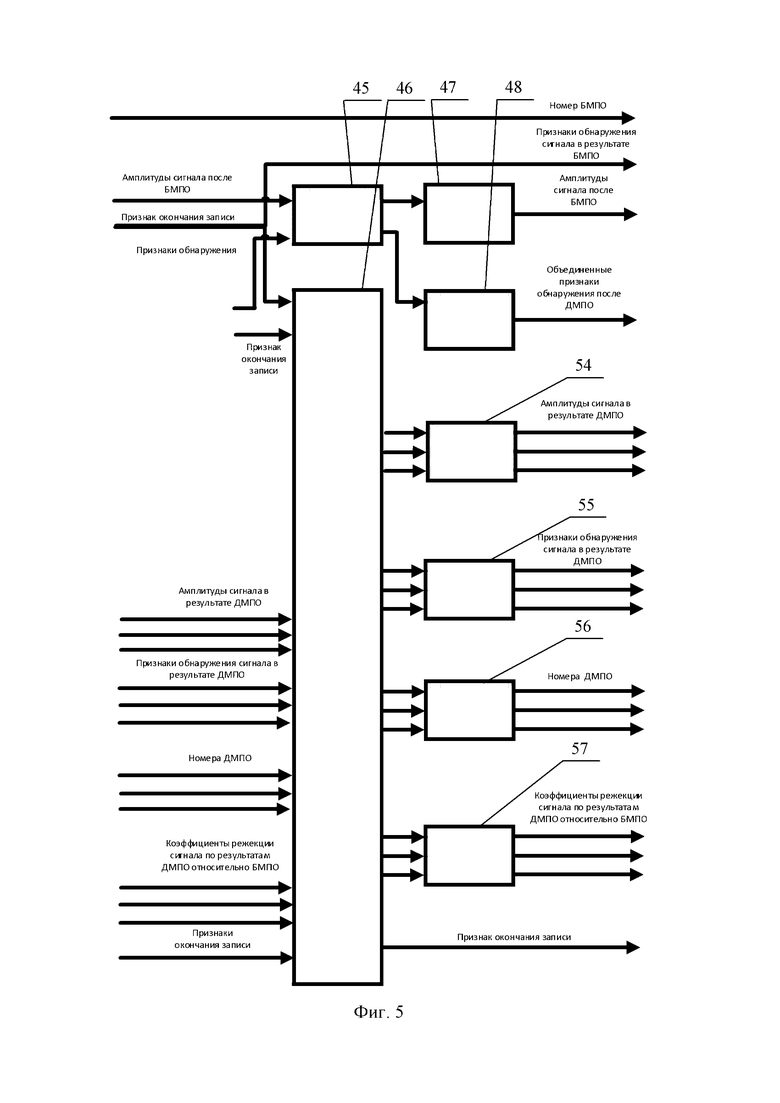
Фиг. 5 – Блок-схема предлагаемого УОВД (часть 2) содержит:
45 – логический элемент «И»;
46 – устройство хранения информации;
47 – устройство чтения информации об амплитудах;
48 – устройство чтения информации о признаках обнаружения;
54 – устройство чтения информации об амплитудах в результате дополнительных МПО;
55 – устройство чтения информации о признаках обнаружения в дополнительных МПО;
56 – устройство чтения информации о номерах дополнительных МПО;
57 – устройство чтения информации о коэффициентах режекции сигнала по результатам дополнительных МПО относительно базовой.
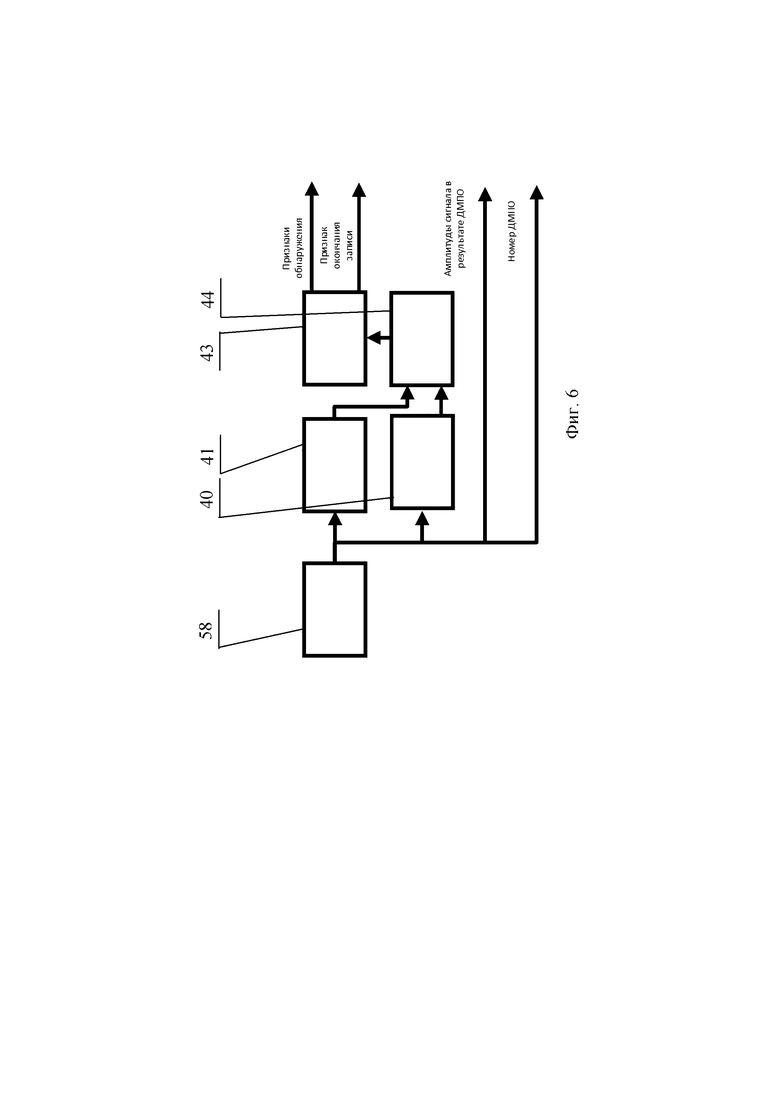
Фиг. 6 – Блок-схема предлагаемого устройства дополнительной МПО:
58 – устройство МПО для режекции ПП;
40 – пороговое устройство 2;
41 – пороговое устройство 1;
43 – устройство записи признаков обнаружения;
44 – логический элемент «И».
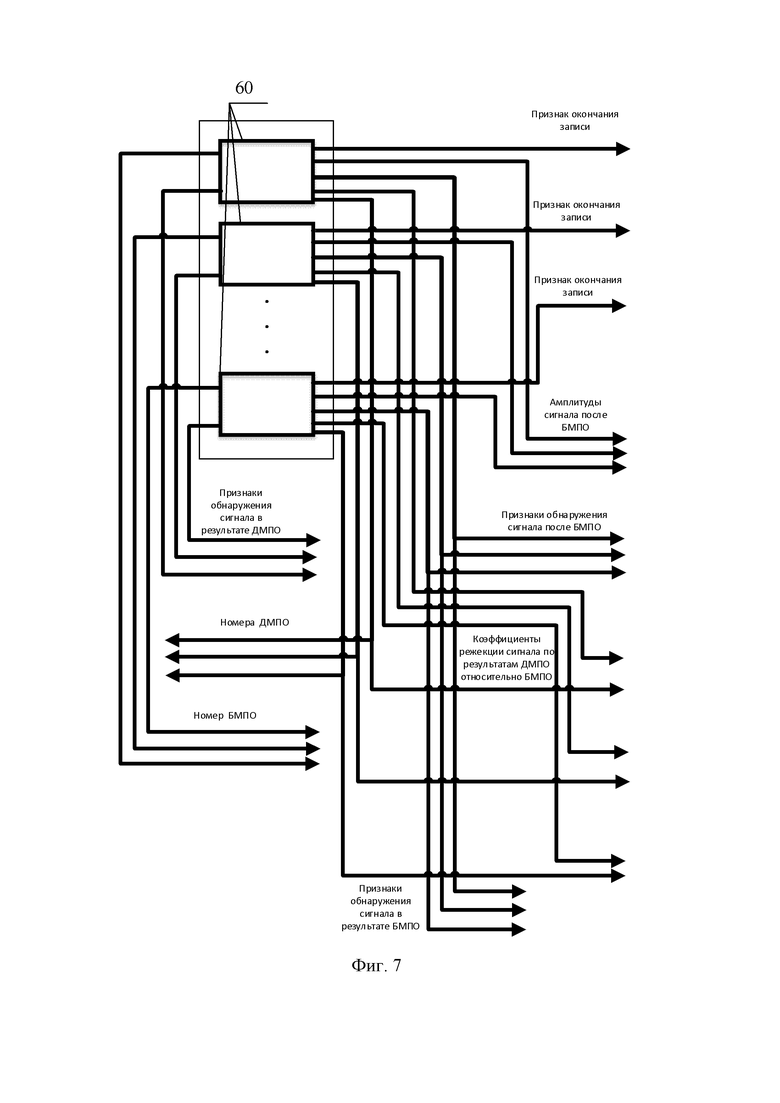
Фиг. 7 – Блок-схема предлагаемого устройства МКПП для импульсно-доплеровских радиолокационных станций (часть 1) содержит:
60 – УОВД.
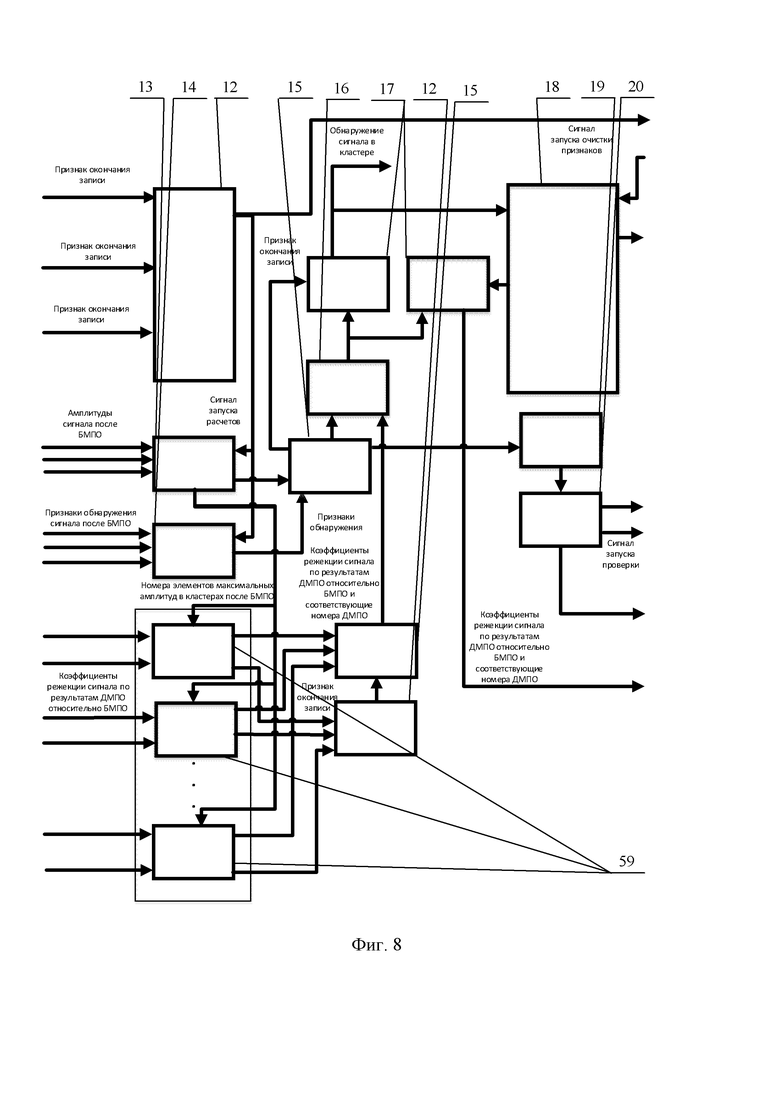
Фиг. 8 – Блок-схема предлагаемого устройства МКПП для импульсно-доплеровских радиолокационных станций (часть 2) содержит:
12 – логический элемент «И»;
13 – устройство отбора максимальных амплитуд в кластерах;
14 – устройство суммирования признаков обнаружения в кластерах;
15 – устройство записи информации о кластерах;
16 – устройство хранения информации о кластерах;
17 – устройство чтения информации о кластерах;
18 – формирователь признаков СППШ;
19 – устройство суммирования циклов обзора;
20 – устройство записи количества циклов обзора;
59 – устройство отбора коэффициентов режекции сигнала в кластерах по результатам дополнительной МПО (ДМПО) относительно базовой (БМПО).
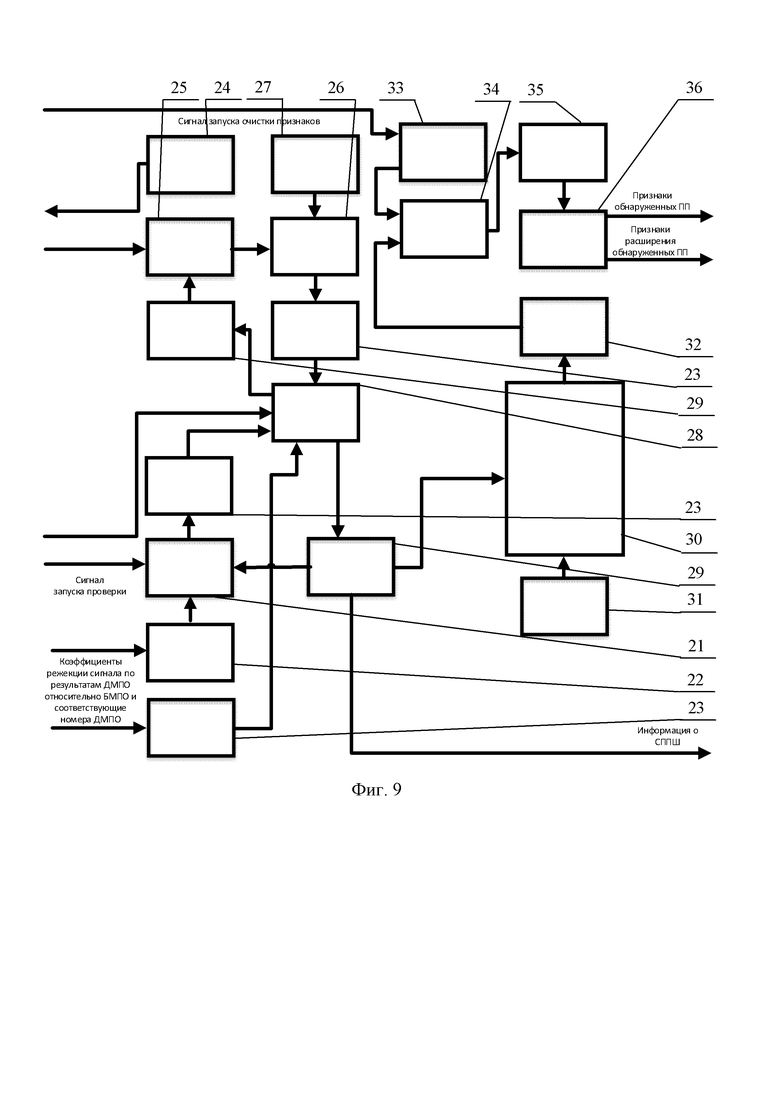
Фиг. 9 – Блок-схема предлагаемого устройства МКПП для импульсно-доплеровских радиолокационных станций (часть 3) содержит:
21 – устройство проверки информации о СППШ;
22 – формирователь критерия проверки информации о СППШ;
23 – устройство записи информации о СППШ;
24 – пороговое устройство;
25 – устройство аккумулирования признаков СППШ;
26 – устройство корректировки информации о СППШ;
27 – формирователь критериев корректировки информации о СППШ;
28 – устройство хранения информации о СППШ;
29 – устройство чтения информации о СППШ;
30 – формирователь признаков обнаружения ПП;
31 – формирователь критериев обнаружения ПП;
32 – устройство записи признаков обнаруженных ПП;
33 – устройство удаления признаков обнаруженных ПП;
34 – устройство хранения признаков обнаруженных ПП;
35 – устройство чтения признаков обнаруженных ПП;
36 – устройство расширения стробов ПП, на выходе которого формируются признаки обнаруженных ПП и признаки расширения обнаруженных ПП.
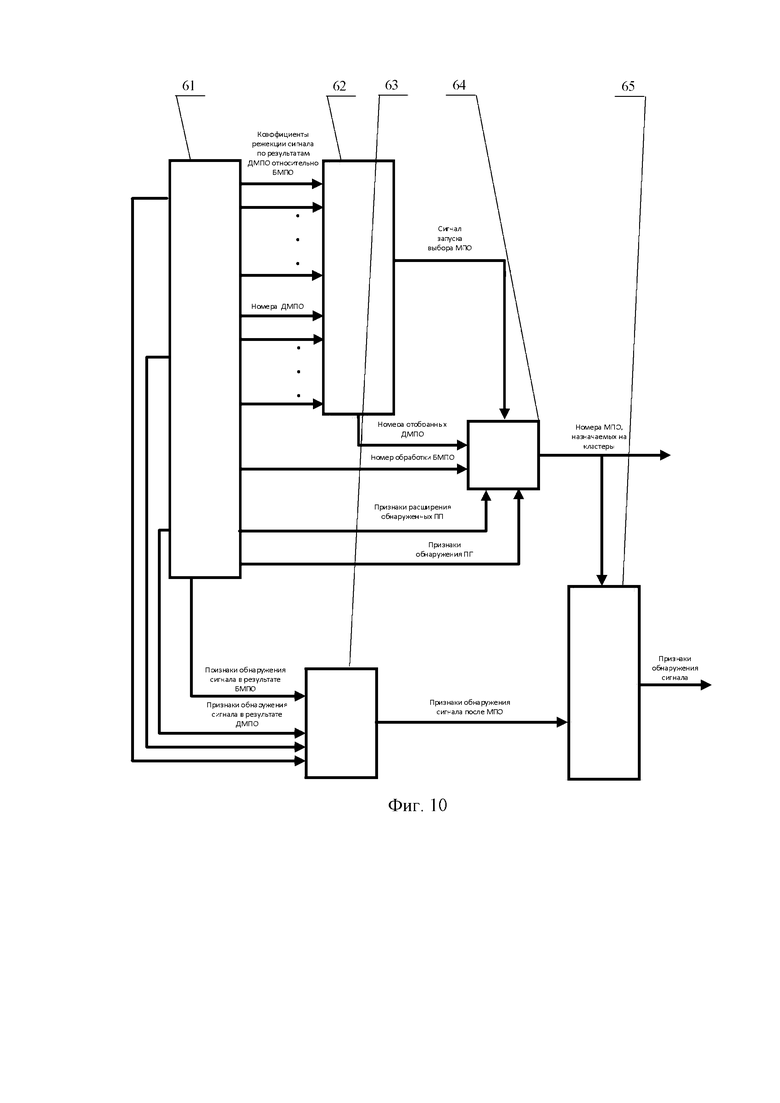
Фиг. 10 – Блок-схема предлагаемого устройства автоматического назначения защиты от ПП для импульсно-доплеровских РЛС содержит:
61 – устройство МКПП;
62 – устройство выбора номеров ДМПО для кластеров при наличии ПП;
63 – формирователь объединенных признаков обнаружения после ДМПО и БМПО;
64 – устройство назначения номера МПО для кластеров;
65 – устройство отбора обнаруженных отметок в кластерах.
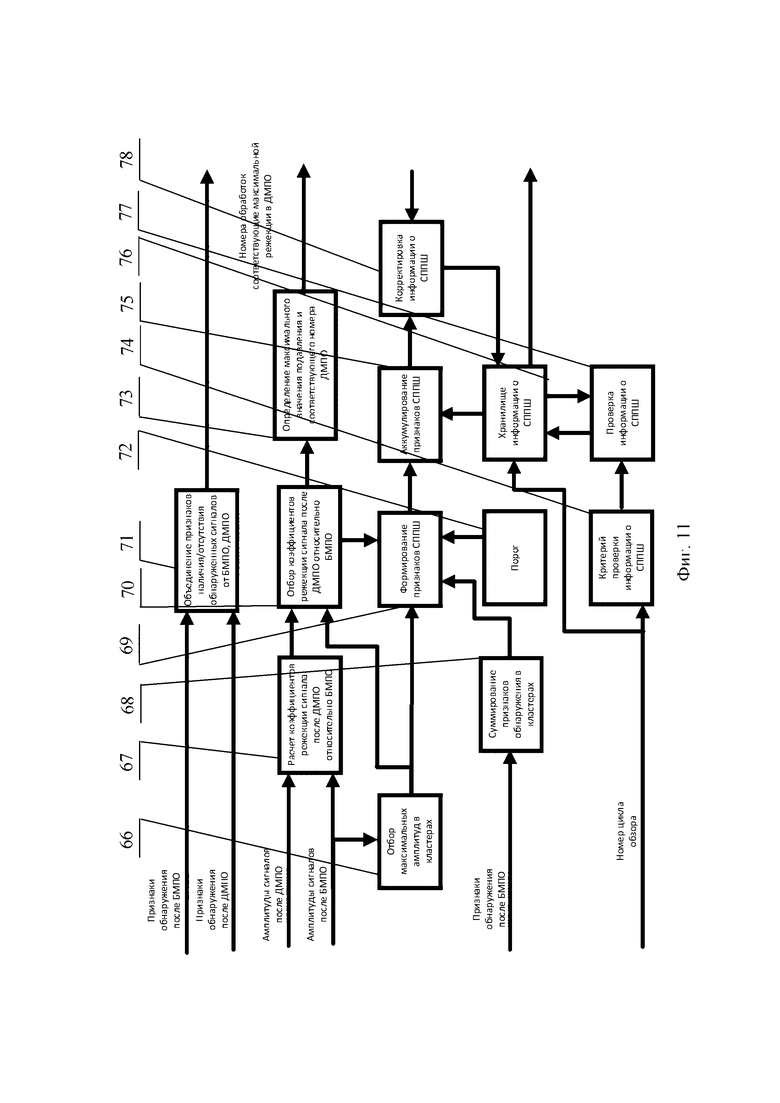
Фиг. 11 – Алгоритм предлагаемой последовательности автоматического назначения защиты от ПП для импульсно-доплеровских РЛС (часть 1) содержит:
66 – блок отбора максимальных амплитуд в кластерах;
67 – блок расчета коэффициентов режекции сигнала после ДМПО относительно БМПО в кластерах;
68 – блок суммирования признаков обнаружения в кластерах;
69 – блок формирования признаков сигнала, превысившего порог по шуму (СППШ);
70 – блок отбора коэффициентов режекции сигнала после ДМПО относительно БМПО в кластерах;
71 – блок объединения признаков наличия/отсутствия обнаруженных сигналов от БМПО, ДМПО в кластерах;
72 – блок порога;
73 – блок определения максимального значения подавления и соответствующего номера ДМПО в кластерах;
74 – блок критерия проверки информации о СППШ;
75 – блок аккумулирования признаков;
76 – блок хранения информации о СППШ;
77 – блок проверки информации о СППШ;
78 – блок корректировки информации о СППШ.
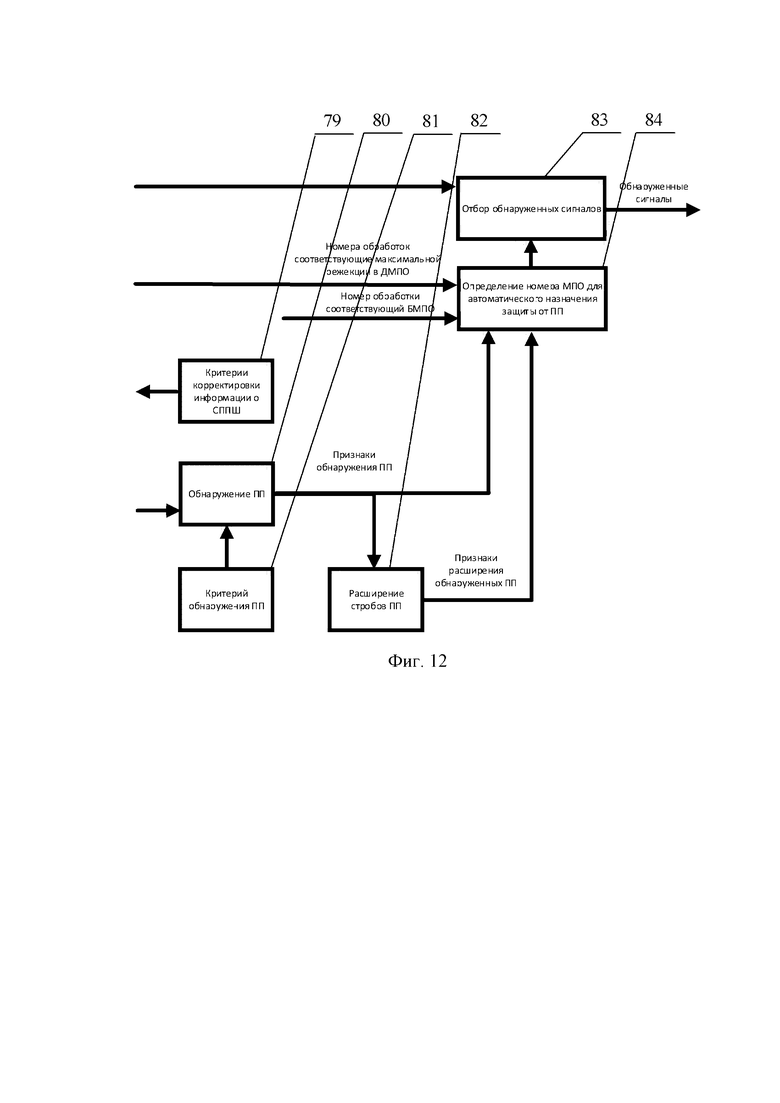
Фиг. 12 – Алгоритм предлагаемой последовательности автоматического назначения защиты от ПП для импульсно-доплеровских РЛС (часть 2) содержит:
79 – блок критериев корректировки информации о СППШ;
80 – блок обнаружения ПП, на выходе которого будут признаки обнаруженных ПП;
81 – блок критериев обнаружения ПП;
82 – блок расширения стробов ПП, на выходе которого будут признаки расширения обнаруженных ПП;
83 – блок отбора обнаруженных сигналов;
84 – блок определения номера МПО для автоматического назначения защиты от ПП в кластерах.
Для того чтобы перейти к описанию заявленного устройства автоматического назначения защиты от ПП для импульсно-доплеровских РЛС, рассмотрим принципы работы устройства МКПП (фиг. 2 патент РФ №2734071, МПК G01S 13/89, 2006.01), результаты работы которого послужат источником данных.
В соответствии с описанием устройство МКПП предоставляет для пространственных кластеров:
- признаки обнаружения ПП, а также расширенные признаки обнаружения (приходящие с блока 36, фиг. 2);
- информацию о СППШ, включающую в себя амплитуду сигнала после МПО 1 (приходящие с блока 29, фиг. 2).
Перечисленный состав данных является необходимым для заявленного устройства автоматического назначения защиты от ПП для импульсно-доплеровских РЛС, но не является достаточным. Для достижения технического результата заявленного устройства предлагается изменить устройство МКПП, а именно изменить в нем УОВД (фиг. 2, блок 11).
Рассмотрим подробнее реализованное УОВД. Во время процесса пространственного обзора отраженные эхо-сигналы (фиг. 3) обрабатываются внутрипериодно (например, согласованным фильтром) и поступают в два параллельных канала межпериодной обработки (МПО). Первый канал содержит, например, некогерентное накопление. После межпериодной обработки амплитуды сигналов и соответствующие им номера по дальности сохраняются. Второй канал межпериодной обработки содержит, например, черезпериодный компенсатор сигнала и пороговые устройства. Главная задача второго канала состоит в том, чтобы подавить низкочастотные составляющие сигнала и выдать объединенные по «И» признаки обнаружения, для соответствующих элементов по дальности, служащие критерием для картографирования в кластере. Вариант межпериодной обработки определяется индивидуально для каждой РЛС, исходя из технического задания.
Такой подход используется в УОВД (фиг. 2, блок 11), являющегося частью устройства МКПП (фиг. 2).
Для заявленного устройства предлагается изменить УОВД (фиг. 2, блок 11) на устройство, показанное на фиг. 4, 5. Где первый канал МПО будет называться БМПО и передавать на выход УОВД признаки обнаружения сигнала и номер обработки, которой будет соответствовать БМПО. Второй канал межпериодной обработки (фиг. 3, блок 39) заменен на группу устройств с ДМПО (фиг. 6), вводимыми для возможности комбинирования зон режекций при назначении защиты от ПП. Количество используемых ДМПО выбирается исходя из задач, решаемых РЛС. Для получения объединенных признаков обнаружения и для расчета коэффициентов режекции сигнала с выхода каждого из устройств ДМПО передаются:
- амплитуды сигнала по результатам работы МПО;
- признаки обнаружения сигнала;
- номер обработки МПО;
- признак окончания записи амплитуды.
Для расчета коэффициентов режекции сигнала после ДМПО относительно БМПО введены соответствующие устройства для каждой из ДМПО отдельно. Каждый блок ДМПО из группы также будет выдавать на выход УОВД (фиг. 4, 5):
- амплитуды сигнала по результатам работы МПО;
- признаки обнаружения сигнала по результатам работы МПО;
- признак окончания записи амплитуды;
- номера МПО, которым соответствуют выдаваемые амплитуды.
Кроме того, для достижения технического результата заявленного устройства предлагается изменить устройство МКПП, а именно добавить в него устройства отбора коэффициентов режекции сигнала в кластерах по результатам ДМПО относительно БМПО для элементов по дальности, соответствующих максимальным амплитудам после БМПО. После чего результаты отобранных коэффициентов в соответствии с номерами ДМПО записываются в устройство хранения информации о кластерах.
После этого необходимо с формирователя признаков СППШ передать сигнал о чтении отобранных коэффициентов с устройства хранения информации о кластерах и о их последующей записи в устройство хранения информации о СППШ.
Таким образом, изменение МКПП (фиг. 7, 8, 9) позволяет подготовить автоматическое назначение защиты от ПП в импульсно-доплеровских РЛС, за счет формирования следующего состава данных:
- признаков обнаружения ПП, а также расширенных признаков обнаружения ПП (приходящие с блока 36, фиг. 2);
- информации о СППШ, включающей в себя коэффициенты режекции сигнала после ДМПО относительно амплитуд после БМПО, а также соответствующих номеров ДМПО (приходящие с блока 29, фиг. 2);
- признаки обнаружения сигнала по результатам работы ДМПО;
- признаки обнаружения сигнала по результатам работы БМПО;
- номера, соответствующие БМПО и ДМПО.
Рассмотрим фиг. 10, на которой представлено заявленное устройство автоматического назначения защиты от ПП для импульсно-доплеровских РЛС. При наличии признаков картографирования ПП по данным ДМПО для кластеров назначаются такие ДМПО, которые имеют наибольшее значение коэффициента режекции сигнала. Для кластеров, в которых отсутствует картографирование ПП, назначается БМПО. В соответствии с этим происходит автоматическое назначение защиты в кластерах, подверженных влиянию ПП, в результате которого происходит отбор признаков наличия/отсутствия обнаруженного сигнала в выбранных МПО для кластеров и достигается заявленный технический результат.
Исходя из алгоритма МКПП (патент РФ №2734071, МПК G01S 13/89, 2006.01), который послужил прототипом для достижения заявленного технического результата, алгоритм автоматического назначения защиты от ПП (Фиг. 11, 12) для кластеров будет следующим:
1. Расчет коэффициентов режекции сигнала после ДМПО относительно БМПО:
 (1)
(1)
где i – количество попаданий в кластер,
A – амплитуды сигнала в кластере после БМПО,
M – амплитуды сигнала в кластере после ДМПО,
D – количество кластеров по дальности,
A – количество кластеров по азимуту,
U – количество кластеров по углу места,
V – количество обработок ДМПО.
2. Отбор максимального значения амплитуды после БМПО:
 (2)
(2)
где md – элемент по дальности с максимальной амплитудой в кластере,
ma – элемент по азимуту с максимальной амплитудой в кластере,
mu – элемент по углу места с максимальной амплитудой в кластере.
3. Отбор коэффициентов режекции сигнала отдельно для каждой ДМПО относительно БМПО следует от выбранных значений в элементах с максимальной амплитудой сигнала после БМПО:
 . (3)
. (3)
4. Сумма признаков обнаружения сигнала:
где F –признаки обнаружения сигналов в кластере.
5. Выделение ПП из внешних и собственных шумов путем сравнения с пороговыми значениями и учетом признаков обнаружения сигнала:
 (5)
(5)
где P – пороговое значение,
O – количество положений сканирующего луча при локации.
6. Расчет суммы признаков СППШ:
7. Изменение номера цикла обзора, при пересчете суммы признаков СППШ:
8. Редактирование рассчитанных сумм признаков СППШ, после проверки номеров цикла обзора:
9. Определение признака обнаружения ПП:
где K – критерий обнаружения ПП.
Критерий обнаружения ПП указывает на минимальное количество аккумулированных признаков обнаружения СППШ в кластере, превышение которого сигнализирует о наличии ПП.
10. Расширение признаков обнаружения ПП:
11. Определение максимального значения коэффициентов режекции среди ДМПО и соответствующего номера обработки:
 (11)
(11)
где kv – номер ДМПО с максимальным подавлением.
12. Определение номера МПО для автоматического назначения защиты от ПП:
 . (12)
. (12)
где j – количество обработок БМПО.
13. Объединение признаков наличия/отсутствия обнаруженных сигналов от БМПО, ДМПО:
 . (13)
. (13)
где G – признаки наличия/отсутствия сигнала после БМПО,
H – признаки наличия/отсутствия сигнала после ДМПО,
jv – объединенная нумерация МПО.
14. Отбор обнаруженных сигналов по объединенным признакам наличия/отсутствия в соответствии с определенными номерами МПО:
 . (14)
. (14)
В результате применения описанного алгоритма, за счет:
- расчета коэффициентов режекции сигнала после ДМПО относительно БМПО;
- отбора максимальных значений амплитуд сигнала в кластерах;
- контроля устаревшей информации аккумулированных признаков СППШ в кластерах с помощью счетчика цикла обзора;
- проверки изменений аккумулированных признаков СППШ в кластерах в текущем цикле обзора, с учетом минимального и максимального возможных значений;
- изменения расчета порога по шуму в соответствии с элементами по дальности для отдельно взятых источников информации;
- расширения стробов ПП по дальности, азимуту и углу места;
- формирования стробов ПП для требуемых пространственных кластеров;
- выбора МПО для определения признаков наличия/отсутствия обнаруженных сигналов в соответствии с рассчитанными коэффициентами режекции сигнала после ДМПО относительно БМПО и в соответствии с определенными стробами ПП;
происходит автоматическое назначение защиты от ПП в импульсно-доплеровских РЛС по дальности, азимуту и углу места в импульсно-доплеровских радиолокационных станциях, как в режиме синхронного радиолокационного обзора, так и в асинхронном режиме, и достигается технический результат изобретения.
Предлагаемый вариант нового устройства автоматического назначения защиты от ПП для импульсно-доплеровских РЛС (фиг. 4-10) содержит устройство обработки входных данных 60, являющиеся источниками исходных данных, таких как амплитуды сигнала после БМПО для устройства отбора максимальных амплитуд в кластерах 13, признаки обнаружения сигнала после БМПО для устройства суммирования признаков обнаружения в кластерах 14, коэффициенты режекции сигнала по результатам ДМПО относительно БМПО и соответствующие им номера обработок для устройства отбора коэффициентов режекции сигнала в кластерах по результатам ДМПО относительно БМПО 59, признаки обнаружения сигнала после ДМПО И БМПО для формирователя объединенных признаков обнаружения после ДМПО и БМПО 63, номер обработки БМПО для устройства назначения номера МПО для кластеров 64, признаки окончания записи для логического элемента «И» 12, который объединяет признаки окончаний записи данных и после чего передает сигнал запуска очистки признаков обнаруженных ПП на устройство удаления признаков, обнаруженных ПП 33 и сигнал запуска расчета информации на устройство отбора максимальных амплитуд в кластерах 13 и устройство суммирования признаков обнаружения в кластерах 14, после расчета данные отправляются для последующей записи в хранилище информации о кластерах через устройство записи информации о кластерах 15 в устройство хранения информации о кластерах 16, а также номера элементов с максимальными амплитудами в кластерах после БМПО передаются в устройство отбора коэффициентов режекции сигнала в кластерах по результатам ДМПО относительно БМПО 59, где формируются признаки окончания записи для логического элемента «И» 12 и отобранные коэффициенты режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО для последующей записи в хранилище информации о кластерах через, устройство записи информации о кластерах 15 в устройство хранения информации о кластерах 16 по окончанию записи в устройстве хранения информации о кластерах 16 выдается соответствующий признак на устройство суммирования циклов обзора 19, значение суммы циклов обзоров через устройство записи количества циклов обзора 20 передается на устройство хранения информации о СППШ 28 и на устройство критерия проверки информации о СППШ 21, после чего выдается признак окончания записи на устройство чтения информации о кластерах 17, который передает данные на устройство формирования признаков СППШ 18, куда также поступает информация о пороге с порогового устройства 24, данные значения сравниваются, определяя наличие СППШ в кластерах, после чего сформированные признаки аккумулируются в устройстве аккумулирования признаков СППШ 25, корректируются в устройстве корректировки информации о СППШ 26 с учетом критериев с формирователя критериев корректировки информации о СППШ 27 и записываются через устройство записи информации о СППШ 23 в устройство хранения информации о СППШ 28, а также с формирователя признаков СППШ 18 передается сигнал для считывания информации о кластерах устройством для чтения информации о кластерах 17 и передачи коэффициентов режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО на устройство хранения информации о СППШ 28, через устройство записи информации о СППШ 23, а затем информация о СППШ считывается и передается устройством чтения информации о СППШ 29 на формирователь признаков обнаружения ПП 30, где аккумулированные признаки СППШ в кластерах сравниваются с критерием обнаружения ПП с формирователя критериев обнаружения ПП 31 и передаются в устройство хранения признаков обнаруженных ПП 34 через устройство записи признаков, обнаруженных ПП 32, далее устройство чтения признаков обнаруженных ПП 35 передает признаки на устройство расширения стробов ПП 36, на выходе которого будут сформированы признаки обнаруженных ПП и признаки расширения обнаруженных ПП, поступающие на устройство назначения номера МПО для кластеров 64, в то же время происходит считывание устройством чтения информации о СППШ 29 коэффициентов режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО с устройства хранения информации о СППШ 28 и их передача на устройство выбора номеров ДМПО для кластеров при наличии ПП 62, с которого на устройство назначения номера МПО для кластеров 64 поступают отобранные номера ДМПО и сигнал запуска выбора МПО, после этого устройство отбора обнаруженных отметок в кластерах 65 на основе признаков обнаружения сигналов после МПО с формирователя объединенных признаков обнаружения после ДМПО и БМПО 63 и номеров МПО, назначаемых в кластерах, с устройства назначения номера МПО для кластеров 64 выбирает признаки обнаружения сигнала.
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) для улучшения качества обнаружения модулированных сигналов на фоне пассивных помех (ПП). Техническим результатом изобретения является обеспечение автоматического назначения защиты от ПП для импульсно-доплеровских РЛС. Заявленный способ заключается в том, что хранят признаки обнаружения наличия/отсутствия сигнала после дополнительной межпериодной обработки (ДМПО) и базовой межпериодной обработки (БМПО), поступающие с устройства обработки входных данных. Задают количество пространственных кластеров, для которых рассчитывают и хранят сумму признаков обнаружения сигнала, превысившего порог по шуму (СППШ); номер цикла обзора, на котором сумма признаков обнаружения СППШ была изменена; амплитуды сигналов после межпериодной обработки, для текущего цикла обзора; максимальные амплитуды после межпериодной обработки, для текущего цикла обзора; признаки обнаружения точечных объектов с доплеровским сдвигом частоты после межпериодной обработки, коэффициентов режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО. Далее максимальные амплитуды в кластерах используют для выделения ПП из внешних и собственных шумов путем сравнения с пороговыми значениями и формированием признаков превышения. После формирования признаков превышения над пороговыми значениями и признаков обнаружения точечных объектов с доплеровским сдвигом частоты аккумулируют признаки СППШ и изменяют номера циклов обзора в кластерах, значения аккумулированных признаков СППШ проверяют, значения лежат в заданных интервалах; проверяют информацию в кластерах, в которые не были внесены изменения, изменяют номер цикла на текущий, а сумму признаков СППШ уменьшают на единицу. Накопленные значения суммы признаков СППШ сравнивают с критерием обнаружения ПП, получая обнаружение ПП в кластерах. Расширяют стробы обнаруженных ПП, в результате чего формируют стробы ПП, признаки их расширения и признаки обнаруженных точечных объектов с доплеровским сдвигом частоты. Отбирают номера межпериодной обработки (МПО) для кластеров по коэффициентам режекции сигналов после ДМПО относительно БМПО, в соответствии с которыми происходит назначение защиты от ПП и отбор признаков наличия/отсутствия обнаруженных сигналов. 2 н.п. ф-лы, 12 ил.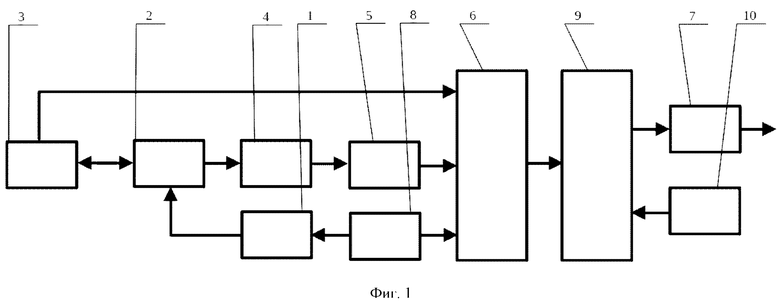
1. Способ автоматического назначения защиты от пассивных помех (ПП) для импульсно-доплеровских радиолокационных станций (РЛС), заключающийся в том, что:
хранят признаки обнаружения наличия/отсутствия сигнала после дополнительной межпериодной обработки (ДМПО) и базовой межпериодной обработки (БМПО), поступающие с устройства обработки входных данных;
задают количество пространственных кластеров, для которых рассчитывают и хранят: сумму признаков обнаружения сигнала, превысившего порог по шуму (СППШ); номер цикла обзора, на котором сумма признаков обнаружения СППШ была изменена; амплитуды сигналов после межпериодной обработки, для текущего цикла обзора; максимальные амплитуды после межпериодной обработки, для текущего цикла обзора; признаки обнаружения точечных объектов с доплеровским сдвигом частоты после межпериодной обработки, коэффициентов режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО;
далее максимальные амплитуды в кластерах используют для выделения ПП из внешних и собственных шумов путем сравнения с пороговыми значениями и формированием признаков превышения;
после формирования признаков превышения над пороговыми значениями и признаков обнаружения точечных объектов с доплеровским сдвигом частоты аккумулируют признаки СППШ и изменяют номера циклов обзора в кластерах, значения аккумулированных признаков СППШ проверяют, что значения лежат в заданных интервалах;
проверяют информацию в кластерах, в которые не были внесены изменения, изменяют номер цикла на текущий, а сумму признаков СППШ уменьшают на единицу;
накопленные значения суммы признаков СППШ сравнивают с критерием обнаружения ПП, получая обнаружение ПП в кластерах;
расширяют стробы обнаруженных ПП, в результате чего формируют стробы ПП, признаки их расширения и признаки обнаруженных точечных объектов с доплеровским сдвигом частоты;
отбирают номера межпериодной обработки (МПО) для кластеров, по коэффициентам режекции сигналов после ДМПО относительно БМПО, в соответствии с которыми происходит назначение защиты от ПП и отбор признаков наличия/отсутствия обнаруженных сигналов.
2. Устройство автоматического назначения защиты от ПП для импульсно-доплеровских РЛС, реализующее способ по п.1 и содержащее устройства обработки входных данных (УОВД) (60), являющиеся источниками исходных данных для устройства отбора максимальных амплитуд в кластерах (13), для устройства суммирования признаков обнаружения в кластерах (14), для устройства отбора коэффициентов режекции сигнала в кластерах по результатам ДМПО относительно БМПО (59), для формирователя объединенных признаков обнаружения после ДМПО и БМПО (63), для устройства назначения номера МПО для кластеров (64), для логического элемента «И» (12), который объединяет признаки окончаний записи данных и после чего передает сигнал запуска очистки признаков обнаруженных ПП и сигнал запуска расчета информации на устройство отбора максимальных амплитуд в кластерах (13) и устройство суммирования признаков обнаружения в кластерах (14), после расчета данные отправляются для последующей записи в хранилище информации о кластерах, через устройство записи информации о кластерах (15) в устройство хранения информации о кластерах (16), а также номера элементов с максимальными амплитудами в кластерах после БМПО передаются в устройства отбора коэффициентов режекции сигнала в кластерах по результатам ДМПО относительно БМПО (59), где формируются признаки окончания записи для логического элемента «И» (12) и отобранные коэффициенты режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО для последующей записи в хранилище информации о кластерах, устройство записи информации о кластерах (15) в устройство хранения информации о кластерах (16), в устройстве хранения информации о кластерах (16) выдается соответствующий признак на устройство суммирования циклов обзора (19), устройство записи количества циклов обзора (20) передается на устройство хранения информации о СППШ (28) и на устройство критерия проверки информации о СППШ (21), после чего выдается признак окончания записи на устройство чтения информации о кластерах (17), который передает данные на устройство формирования признаков СППШ (18), куда также поступает информация о пороге с порогового устройства (24), данные значения сравниваются, определяя наличие СППШ в кластерах, после чего сформированные признаки аккумулируются в устройстве аккумулирования признаков СППШ (25), корректируются в устройстве корректировки информации о СППШ (26) с учетом критериев с формирователя критериев корректировки информации о СППШ (27) и записываются через устройство записи информации о СППШ (23) в устройство хранения информации о СППШ (28), а также с формирователя признаков СППШ (18) передается сигнал для считывания информации о кластерах устройством для чтения информации о кластерах (17) и передачи коэффициентов режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО на устройство хранения информации о СППШ (28), через устройство записи информации о СППШ (23), а затем информация о СППШ считывается и передается устройством чтения информации о СППШ (29) на формирователь признаков обнаружения ПП (30), с формирователя критериев обнаружения ПП (31) и передаются в устройство хранения признаков обнаруженных ПП (34) через устройство записи признаков, обнаруженных ПП (32), далее устройство чтения признаков обнаруженных ПП (35) передает признаки на устройство расширения стробов ПП (36), на выходе которого будут сформированы признаки обнаруженных ПП и признаки расширения обнаруженных ПП, поступающие на устройство назначения номера МПО для кластеров (64), в то же время происходит считывание устройством чтения информации о СППШ (29) коэффициентов режекции сигнала после ДМПО относительно БМПО с соответствующими номерами ДМПО с устройства хранения информации о СППШ (28) и их передача на устройство выбора номеров ДМПО для кластеров при наличии ПП (62), с которого на устройство назначения номера МПО для кластеров (64) поступают отобранные номера ДМПО и сигнал запуска выбора МПО, после этого устройство отбора обнаруженных отметок в кластерах (65) на основе признаков обнаружения сигналов после МПО с формирователя объединенных признаков обнаружения после ДМПО и БМПО (63) и номеров МПО, назначаемых в кластерах, с устройства назначения номера МПО для кластеров (64) выбирает признаки обнаружения сигнала и номеров МПО, назначаемых в кластерах, выбирает признаки обнаружения сигнала.
| Межобзорное устройство картографирования пассивных помех для импульсно-доплеровских радиолокационных станций и способ его осуществления | 2020 |
|
RU2734071C1 |
| СПОСОБ ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584696C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2015 |
|
RU2593276C1 |
| СПОСОБ КЛАССИФИКАЦИИ И БЛАНКИРОВАНИЯ ДИСКРЕТНЫХ ПОМЕХ | 2018 |
|
RU2710894C1 |
| МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПАССИВНЫХ ПОМЕХ ПРИ ИСПОЛЬЗОВАНИИ ЛЧМ СИГНАЛОВ | 2012 |
|
RU2510863C1 |
| СПОСОБ ИЗМЕРЕНИЯ МЕЖДУПЕРИОДНОГО КОЭФФИЦИЕНТА КОРРЕЛЯЦИИ ПАССИВНЫХ ПОМЕХ | 2009 |
|
RU2419809C1 |
| СОЛОНАР А.С., ГОРШКОВ С.А., ХМАРСКИЙ П.А., ВАШКЕВИЧ А.М | |||
| Межобзорная компенсация дискретных мешающих отражений с формированием карты помех и накоплением решений // Журнал "Доклады | |||

