Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) для улучшения качества обнаружения модулированных сигналов на фоне пассивных помех (ПП).
Уровень техники
Защита от пассивных помех в РЛС является одной из важнейших задач при обнаружении полезного эхо-сигнала, которая существенно усложняется необходимостью корректного обнаружения полезных эхо-сигналов, отраженных от малоскоростных объектов (СОМО). Назначение на области пространства с наличием ПП межимпульсной обработки с достаточно широкой зоной режекции приводит к увеличению «слепых» по скорости зон, что может привести к значительному ослаблению спектральных составляющих полезного эхо-сигнала и ухудшению характеристик его обнаружения.
Из уровня техники широко известно межобзорное устройство картографирования ПП при использовании ЛЧМ сигналов (Фиг.1, патент РФ №2510863, МПК G01S 13/89, 2006), учитывающее опыт предыдущих разработок, таких как патент Франции №2241077, МПК G01S 9/42, 1975, патент США №4068231, МПК G01S 9/02, 1978, патент РФ №2040802, МПК G01S 13/89, G01S 7/36, 1985. Это устройство содержит обнаружитель сигналов, три логических элемента по И, два блока расширения строба по дальности, счетчик целей, два пороговых блока, оперативный запоминающий блок, линию задержки, блок ранжирования и умножитель.
Выберем данное устройство за прототип, так как оно является наиболее близким по технической сущности к заявленному устройству.
Указанное устройство за счет информации о ПП, полученной в текущем и предыдущем обороте, включая расширение стробов ПП по дальности в двух местах устройства, а также за счет использования блока ранжирования, пороговых устройств, счетчика целей, не ухудшило качество межобзорного картографирования ПП по сравнению с ранее известными устройствами, а также позволило добиться отсутствия картографирования не только по одиночному точечному СОМО, но и по двум близкорасположенным эхо-сигналам.
Однако, в рассмотренном прототипе, следует обратить внимание на следующие недостатки, устранение которых позволит повысить качество межобзорного картографирования ПП, делая его более универсальным при применении в многофункциональных РЛС. К таким недостаткам прототипа можно отнести:
- отсутствие функциональных блоков, учитывающих асинхронный обзор РЛС;
- формирование стробов ПП в азимутально-дальностной плоскости без картографирования по углу места;
- отсутствие возможности расширения стробов по азимуту и углу места, так как блоки 5 и 3 формируют только расширение стробов по дальности;
- применение порогового обнаружителя с постоянным уровнем, который не позволяет корректно обрабатывать точечные СОМО с малой мощностью в дальностных элементах, где используется временная автоматическая регулировка усиления (ВАРУ), или где принимается лишь часть эхо-сигнала (зона неполного «сжатия»), так как уровень мощности шума в таких элементах отличается для остальных элементов по дальности;
- отсутствие возможности регулировки минимального размера строба при картографировании ПП для соответствия кластерам (пространственных интервалов по дальности, азимуту и углу места), рассматриваемым для отдельно взятой РЛС, а также отсутствует алгоритм объединения признаков обнаружения ПП в регулируемых стробах.
Раскрытие изобретения
Техническая проблема, на решение которой направлено заявляемое техническое изобретение, заключается в межобзорном картографировании ПП для импульсно-доплеровских радиолокационных станций.
Техническими результатами изобретения являются:
- картографирование ПП по дальности, азимуту и углу места;
- расширение стробов ПП по дальности, азимуту и углу места;
- регулировка минимальных стробов картографирования ПП в соответствии с пространственными кластерами, рассматриваемыми в отдельно взятой РЛС;
- использование пороговых устройств с адаптивными пороговыми значениями для исключения полезных точечных СОМО в процессе картографирования ПП;
- возможность работы как при синхронном, так и асинхронном обзоре;
- определение границ ПП при картографировании;
- определение признаков обнаружения от одиночных или близкорасположенных объектов с доплеровским сдвигом частоты в кластерах;
- индифферентный к скорости и способу радиолокационного обзора при межобзорном картографировании ПП.
Указанные технические результаты достигаются в способе межобзорного картографирования на фоне пассивных помех (ПП) для импульсно-доплеровских радиолокационных станций включающий этапы на которых: во время процесса пространственного обзора картографируют ПП в кластерах, обновляя их каждый цикл обзора; накопленные значения признаков сигнала, превысившего порог по шуму СППШ в кластере записывают и хранят совместно с номером оборота, в котором произошло последнее изменение аккумулированного значения; определяют совокупность параметров, предоставляющих возможность регулировать картографирование ПП с различным доплеровским спектром; формируют входные данные содержащие амплитуды сигнала после межпериодной обработки, признаки обнаружения после дополнительной межпериодной обработки, номер текущего цикла обзора; производят отбор максимального значения амплитуды; формируют сумму признаков обнаружения сигнала; осуществляют сравнение отобранного максимального значения амплитуды с порогом, исключающим работу по шуму и учетом признаков обнаружения сигнала; рассчитывают суммы признаков СППШ; изменяют номер цикла обзора, при пересчете суммы признаков СППШ; редактируют рассчитанные суммы признаков СППШ, после проверки номеров цикла обзора: определяют признак обнаружения ПП по критерию обнаружения ПП, который указывает на минимальное количество аккумулированных признаков обнаружения СППШ в кластере, превышение которого сигнализирует о наличии ПП; производят расширение признаков обнаружения ПП.
Дополнительной особенностью является то, что совокупность параметров, предоставляющих возможность регулировать картографирование ПП с различным доплеровским спектром включает в себя значение критерия обнаружения ПП, минимально и максимально возможные значения аккумулированных признаков СППШ, интервалы по дальности, азимуту и углу места, характеризующие размер кластера.
Указанные технические результаты достигаются также благодаря устройству межобзорного картографирования на фоне пассивных помех (ПП) для импульсно-доплеровских радиолокационных станций (РЛС) содержит параллельно подключенные первый, второй, n-й блоки обработки входных данных(27), сигналы с которых передаются на блок отбора максимальных амплитуд(15) в кластерах, блок суммирования признаков обнаружения в кластерах (14), а также блок логического элемента И (28), с выхода которого передается сигнал, содержащий объединенные признаки окончаний записи данных, на блок запуска очистки признаков обнаруженных ПП (38), а также сигнал запуска расчета информации поступающий на входы блоков отбора максимальных амплитуд в кластерах (15) и суммирования признаков обнаружения в кластерах (15), выходные сигналы которых поступают в блок записи информации о кластерах (29), далее с первого выхода, сигнал поступает на блок сумматора циклов обзора 32 и, через блок записи 33, передается на блок хранения информации о СППШ 20, блок проверки информации СППШ 21, блок критерия проверки информации о СППШ 18; при этом через второй выход блока записи информации о кластерах (29) сигнал передается на блок хранения информации кластеров (30) и далее через блок чтения информации о кластерах (31) в блок формирователя признаков СППШ (16), куда также поступает информация о пороге с блока порога 17, где значения данные сигналов сравниваются, определяя наличие СППШ в кластерах, после чего сигнал, содержащий сформированные признаки, передается в блок аккумулирования признаков СППШ (19), далее корректируются в блоке корректировки информации о СППШ (22) с учетом критериев с блока формирователя критериев корректировки информации о СППШ (23) и передаются через блок записи информации о СППШ (34) в блок хранения информации о СППШ (20), а затем через блок чтения информации о СППШ (35) сигнал поступает на блок формирователя признаков обнаружения ПП (24), где сигнал, содержащий аккумулированные признаки СППШ в кластерах сравниваются с критерием обнаружения ПП с блока формирователя критериев обнаружения ПП (25) и через блок записи 36, передаются в блок хранения признаков обнаруженных ПП (37) и далее в блок чтения признаков обнаруженных ПП (39) и в блок расширения стробов ПП (26), на выходе которого будут сформированы признаки обнаруженных ПП и признаки расширения обнаруженных ПП.
Краткое описание чертежей
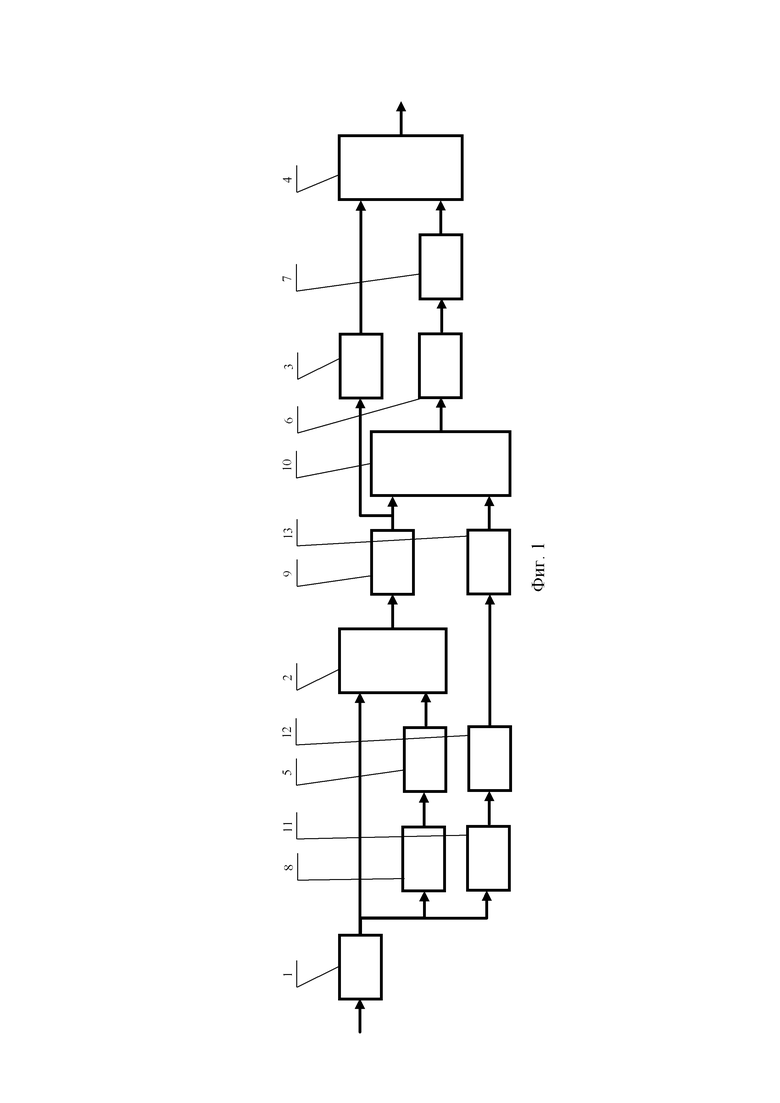
Фиг. 1 – Блок-схема используемого устройства межобзорного картографирования ПП при использовании ЛЧМ сигналов содержит:
1– обнаружитель сигналов;
2, 4, 10 – логические элементы по И;
3, 5 – блоки расширения по дальности;
6 – счетчик целей;
7, 13 – пороговые устройства;
8 – оперативное запоминающее устройство;
9 – линию задержки;
11 – блок ранжирования;
12 – умножитель.
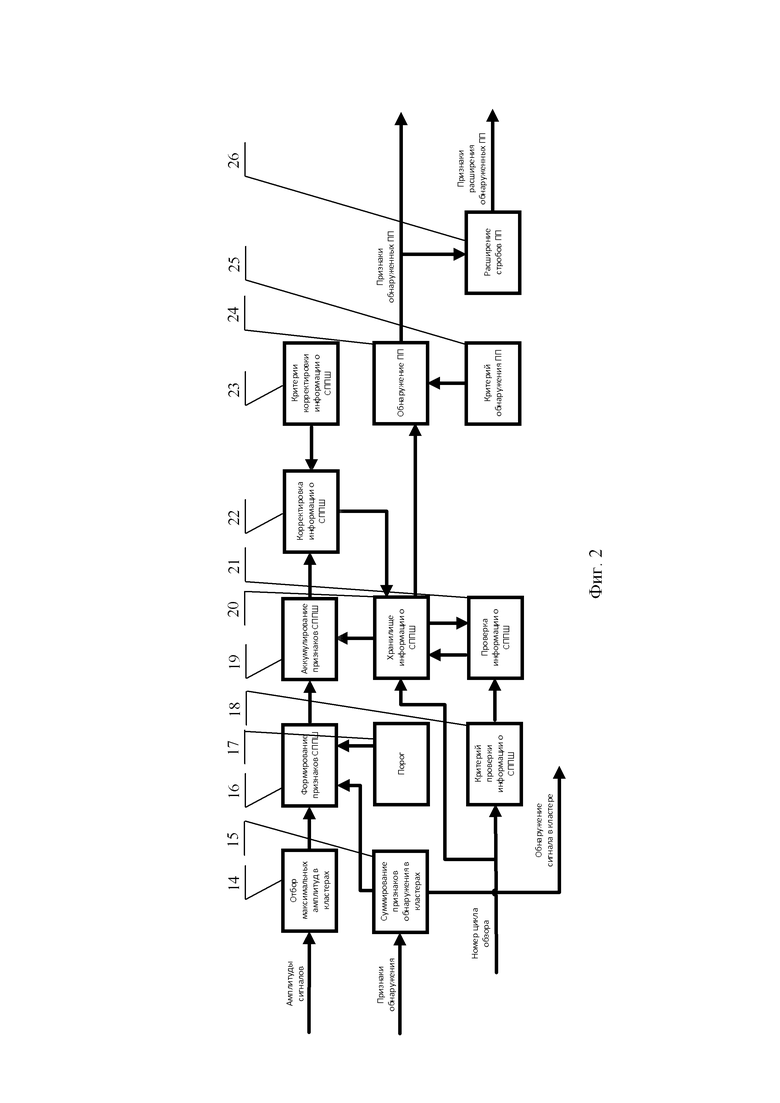
Фиг. 2 – Алгоритм предлагаемой последовательности межобзорного картографирования ПП для импульсно-доплеровских радиолокационных станций содержит:
14 – блок отбора максимальных амплитуд в кластерах;
15 – блок суммирования признаков обнаружения в кластерах;
16 – блок формирования признаков сигнала, превысившего порог по шуму (СППШ);
17 – блок порога;
18 – блок критерия проверки информации о СППШ;
19 – блок аккумулирования признаков;
20 – блок хранения информации о СППШ;
21 – блок проверки информации о СППШ;
22 – блок корректировки информации о СППШ;
23 – блок критериев корректировки информации о СППШ;
24 – блок обнаружения ПП, на выходе которого будут признаки обнаруженных ПП;
25 – блок критериев обнаружения ПП;
26 – блок расширения стробов ПП, на выходе которого будут признаки расширения обнаруженных ПП.
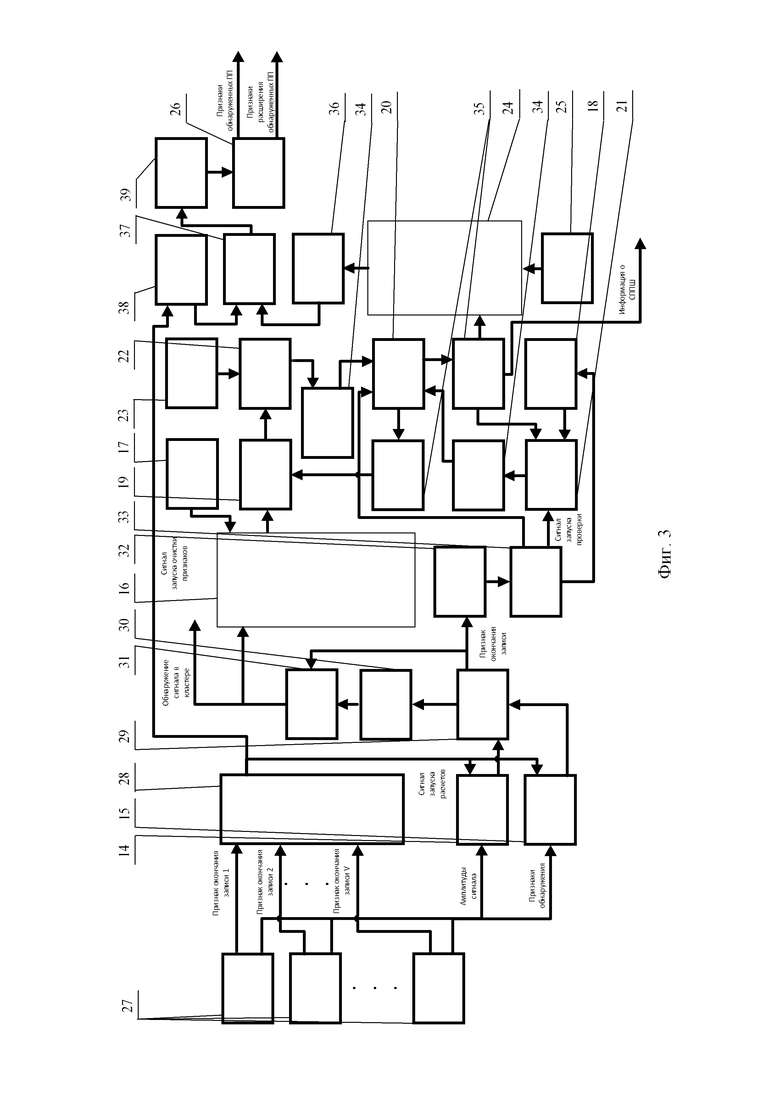
Фиг. 3 – Блок-схема предлагаемого устройства межобзорного картографирования ПП для импульсно-доплеровских радиолокационных станций содержит:
26 –блок обработки входных данных;
28 – логический элемент И;
37 –блок удаления признаков обнаруженных ПП;
14 –блок отбора максимальных амплитуд в кластерах;
15 –блок суммирования признаков обнаружения в кластерах;
29 –блок записи информации о кластерах;
30 –блок хранения информации кластеров;
32 –блок суммирования циклов обзора;
33 –блок записи количества циклов обзора;
20 –блок хранения информации о СППШ;
18 – блок формирователь критерия проверки информации о СППШ;
31 – блок чтения информации о кластерах;
16 – блок формирователь признаков СППШ;
17 – пороговый блок;
19 – блок аккумулирования признаков СППШ;
22 – блок корректировки информации о СППШ;
23 – блок формирователя критериев корректировки информации о СППШ;
34 – блок записи информации о СППШ;
38- блок запуска очистки признаков обнаруженных ПП
21- блок проверки информации о СППШ;
35 – блок чтения информации о СППШ;
24 – блок формирователь признаков обнаружения ПП;
25 – блок формирователь критериев обнаружения ПП;
37 –блок хранения признаков обнаруженных ПП;
36 –блок записи признаков обнаруженных ПП;
39 –блок чтения признаков обнаруженных ПП;
26 –блок расширения стробов ПП, на выходе которого будут признаки обнаруженных ПП и признаки расширения обнаруженных ПП.
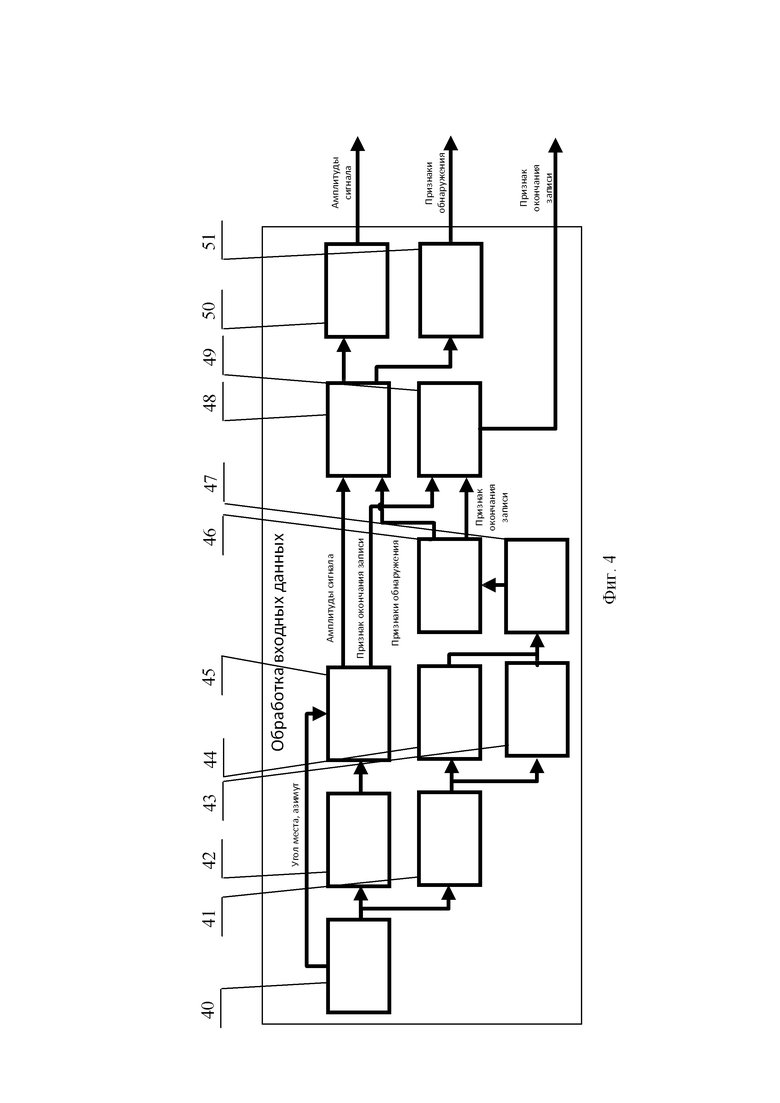
Фиг. 4 – Блок-схема обработки входных данных предлагаемого устройства межобзорного картографирования ПП для импульсно-доплеровских радиолокационных станций содержит:
40 – источник информации;
41 –блок межпериодной обработки информации 2;
42 –блок межпериодной обработки информации 1;
43 – пороговый блок 2;
44 – пороговый блок 1;
45 – блок записи амплитуд сигнала;
46 – блок записи признаков обнаружения;
47, 49 – логический элемент И;
48 – блок хранения информации;
50 – блок чтения информации об амплитудах, на выходе которого будут амплитуды сигнала;
51 – блок чтения информации о признаках обнаружения, на выходе которого будут признаки обнаруженных ПП.
Работа заявленного устройства межобзорного картографирования ПП для импульсно-доплеровских радиолокационных станций заключается в следующем:
во время процесса пространственного обзора необходимо картографировать ПП в кластерах, обновляя их каждый цикл обзора. Обзор проводится импульсными сигналами, такими как ЛЧМ или ФКМ сигналы, где количество импульсов в пачке влияет только на мощность обнаруживаемых ПП, а не на качество работы предлагаемого устройства.
Накопленные значения признаков СППШ в кластере хранятся совместно с номером оборота, в котором произошло последнее изменение аккумулированного значения.
Необходимо уточнить, что при межобзорном картографировании ПП в заявленном устройстве для исключения работы по шуму используется порог, который просчитывается заранее для каждого источника информации и для каждого элемента по дальности.
В случае использования одновременного (параллельного) обзора, как и в случае с последовательным обзором, количество параллельных лучей может быть любым, так как они являются лишь дополнительными источниками информации (см. Фиг. 3).
Совокупность параметров, предоставляющих возможность регулировать картографирование ПП с различным доплеровским спектром, перечислены ниже:
- значение критерия обнаружения ПП;
- минимально и максимально возможные значения аккумулированных признаков СППШ;
- интервалы по дальности, азимуту и углу места, характеризующие размер кластера.
Предотвращение ошибочного картографирования ПП по сигналам, отраженным от точечных объектов с доплеровским сдвигом частоты, осуществляется на основе наличия признаков обнаружения, поступающих с блока обработки входных данных, внутри которого работают пороговые блоки.
Тип порогового блока необходимо выбирать исходя из уменьшения вероятности обнаружения ПП и увеличения вероятности обнаружения от одиночных или близкорасположенных объектов с доплеровским сдвигом частоты. Например, комбинация пороговых блоков может быть следующей: пороговый блок 1, рассмотренное в патенте РФ №2678822, МПК G01S 7/36, 2017, и пороговый блок 2 - Cell-Averaging CFAR, рассмотренное в книге Fundamentals of radar Signal Processing, Mark A. Richards, 2005, ISBN 0-07-144474-2, стр. 349. Поиск требуемых параметров пороговых блоков осуществляется статистическим моделированием.
При локации отраженные эхо-сигналы проходят внутрипериодную обработку (например, согласованный фильтр) и поступают в два параллельных канала межпериодной обработки.
Первый канал содержит, например, некогерентное накопление. После межпериодной обработки амплитуды сигналов и соответствующие им номера по дальности сохраняются.
Второй канал межпериодной обработки содержит, например, черезпериодный компенсатор сигнала и пороговые блоки. Главная задача второго канала состоит в том, чтобы подавить низкочастотные составляющие сигнала и выдать объединенные по «И» признаки обнаружения, для соответствующих элементов по дальности, которые являются критерием для картографирования в кластере. Вариант межпериодной обработки определяется индивидуально для каждой РЛС исходя из тактико-технического задания.
Таким образом, полученные амплитуды сигнала после межпериодной обработки и признаки обнаружения после дополнительной межпериодной обработки, а также номер текущего цикла обзора, служат входными данными для способа межобзорного картографирования ПП, который включает следующие действия для каждого кластера в текущем обзоре:
1. Отбор максимального значения амплитуды:
 (1)
(1)
где I –количество попаданий в кластер,
A –амплитуды сигнала в кластере,
D –количество кластеров по дальности,
A –количество кластеров по азимуту,
U –количество кластеров по углу места.
2. Сумма признаков обнаружения сигнала:
где F –амплитуды сигнала в кластере.
3. Сравнение отобранного максимального значения амплитуды с порогом, исключающим работу по шуму, и учетом признаков обнаружения сигнала:
 (3)
(3)
где P – пороговое значение,
O – количество положений сканирующего луча при локации.
4. Расчет суммы признаков СППШ:
5. Изменение номера цикла обзора, при пересчете суммы признаков СППШ:
6. Редактирование рассчитанных сумм признаков СППШ, после проверки номеров цикла обзора:
7. Определение признака обнаружения ПП:
где K – критерий обнаружения ПП.
Критерий обнаружения ПП указывает на минимальное количество аккумулированных признаков обнаружения СППШ в кластере, превышение которого сигнализирует о наличии ПП.
8. Расширение признаков обнаружения ПП:

В результате применения описанного способа, за счет:
- отбора максимальных значений амплитуд сигнала в кластерах;
- контроля устаревшей информации аккумулированных признаков СППШ в кластерах с помощью счетчика цикла обзора;
- проверки изменений аккумулированных признаков СППШ в кластерах в текущем цикле обзора, с учетом минимального и максимального возможных значений;
- изменения расчета порога по шуму в соответствии с элементами по дальности для отдельно взятых источников информации;
- расширения стробов ПП по дальности, азимуту и углу места;
- формирования стробов ПП для требуемых пространственных кластеров;
происходит межобзорное картографирование ПП по дальности, азимуту и углу места в импульсно-доплеровских радиолокационных станциях, как в режиме синхронного радиолокационного обзора, так и в асинхронном режиме, и достигается технический результат изобретения.
Необходимо указать, что предлагаемый способ предоставляет возможность определения границ ПП при картографировании, а также предоставляет признаки обнаружения сигналов в кластерах, отраженных от одиночных или близкорасположенных объектов с доплеровским сдвигом частоты в текущем цикле обзора.
Предлагаемый вариант нового устройства межобзорного картографирования ПП для импульсно-доплеровских радиолокационных станций содержит блоки обработки входных данных 27, которые передают информацию на блок отбора максимальных амплитуд в кластерах 14 и блок суммирования признаков обнаружения в кластерах 15, а также передают признаки окончания записи на блок логического элемента И 28, который объединяет признаки окончаний записи данных и после чего передает сигнал запуска очистки признаков обнаруженных ПП на блок 38 и сигнал запуска расчета информации на блоки 14 и 15, после расчета данные отправляются для последующей записи в хранилище информации о кластерах через блок 29 в блок 30, по окончанию записи выдается соответствующий признак на блок сумматора циклов обзора 32, значение суммы циклов обзоров через блок записи 33 передается на блок хранения информации о СППШ 20 и на блок критерия проверки информации о СППШ 18, после чего выдается признак окончания записи на блок чтения информации о записи 31, который передает данные на блок формирования признаков СППШ 16, куда также поступает информация о пороге с блока 17, данные значения сравниваются, определяя наличие СППШ в кластерах, после чего сформированные признаки аккумулируются в 19 блоке, корректируются в блоке 22 с учетом критериев с блока 23 и записываются через блок 34 в блок хранения информации о СППШ 20, а затем информация о СППШ считывается и передается блоком 35 на блок обнаружения ПП 24, где аккумулированные признаки СППШ в кластерах сравниваются с критерием обнаружения ПП с блока 25 и передаются в блок хранения признаков обнаруженных ПП 37 через блок записи 36, далее блок чтения признаков обнаруженных ПП 39 передает признаки на блок расширения стробов ПП 26, на выходе которого будут сформированы признаки обнаруженных ПП и признаки расширения обнаруженных ПП.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической защиты импульсно-доплеровских радиолокационных станций от пассивных помех и способ его осуществления | 2021 |
|
RU2762375C1 |
| Межобзорное устройство картографирования несинхронных импульсных помех для импульсно-доплеровских радиолокационных станций и способ его осуществления | 2021 |
|
RU2751532C1 |
| МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПОМЕХ | 1985 |
|
RU2040802C1 |
| МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПАССИВНЫХ ПОМЕХ ПРИ ИСПОЛЬЗОВАНИИ ЛЧМ СИГНАЛОВ | 2012 |
|
RU2510863C1 |
| Способ обнаружения маневрирующих малоразмерных воздушных объектов с использованием параметрических преобразований и устройство для его реализации | 2023 |
|
RU2806448C1 |
| СПОСОБ НЕКОГЕРЕНТНОГО ЭКСТРЕМАЛЬНОГО НАКОПЛЕНИЯ-ОБНАРУЖЕНИЯ СИГНАЛА В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2019 |
|
RU2694809C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777652C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МЕШАЮЩИХ ОТРАЖЕНИЙ ОТ ОПТИЧЕСКИ НЕНАБЛЮДАЕМЫХ ОБЪЕКТОВ ("АНГЕЛОВ") | 2006 |
|
RU2308736C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ЦЕЛИ (ВАРИАНТЫ) | 2009 |
|
RU2428711C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) для улучшения качества обнаружения модулированных сигналов на фоне пассивных помех (ПП). Технический результат заключается в обеспечении межобзорного картографирования ПП для импульсно-доплеровских РЛС. В способе задают количество пространственных кластеров, для которых рассчитывают и хранят сумму признаков обнаружения сигнала, превысившего порог по шуму в кластере (СППШ); номер цикла обзора, на котором сумма признаков обнаружения СППШ была изменена; амплитуды сигналов после межпериодной обработки для текущего цикла обзора; максимальные амплитуды после межпериодной обработки для текущего цикла обзора; признаки обнаружения точечных объектов с доплеровским сдвигом частоты после межпериодной обработки. Далее максимальные амплитуды в кластерах используют для сравнения с пороговыми значениями, исключающими работу по шуму, после чего формируют признаки превышения над пороговыми значениями. Аккумулируют признаки СППШ и изменяют номера циклов обзора в кластерах. Проверяют, лежат ли значения аккумулированных признаков СППШ в заданных интервалах, а также информацию в кластерах, в которые не были внесены изменения. Изменяют номер цикла на текущий, а сумму признаков СППШ уменьшают на единицу. Накопленные значения суммы признаков СППШ сравнивают с критерием обнаружения ПП, получая обнаружение ПП в кластерах. Расширяют стробы обнаруженных ПП, в результате чего формируют стробы ПП, признаки их расширения и признаки обнаруженных точечных объектов с доплеровским сдвигом частоты. 2 н. и 1 з.п. ф-лы, 4 ил.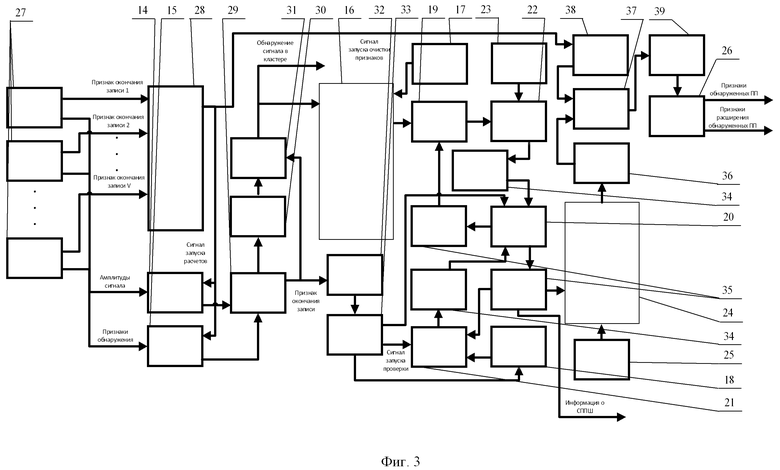
1. Способ межобзорного картографирования на фоне пассивных помех (ПП) для импульсно-доплеровских радиолокационных станций, включающий этапы, на которых:
во время процесса пространственного обзора картографируют ПП в кластерах, обновляя их каждый цикл обзора;
накопленные значения признаков сигнала, превысившего порог по шуму в кластере (СППШ) записывают и хранят совместно с номером оборота, в котором произошло последнее изменение аккумулированного значения;
определяют совокупность параметров, предоставляющих возможность регулировать картографирование ПП с различным доплеровским спектром
формируют входные данные, содержащие амплитуды сигнала после межпериодной обработки, признаки обнаружения после дополнительной межпериодной обработки, номер текущего цикла обзора;
производят отбор максимального значения амплитуды;
формируют сумму признаков обнаружения сигнала;
осуществляют сравнение отобранного максимального значения амплитуды с порогом, исключающим работу по шуму и учетом признаков обнаружения сигнала;
рассчитывают суммы признаков СППШ;
изменяют номер цикла обзора, при пересчете суммы признаков СППШ;
редактируют рассчитанные суммы признаков СППШ, после проверки номеров цикла обзора:
определяют признак обнаружения ПП по критерию обнаружения ПП, который указывает на минимальное количество аккумулированных признаков обнаружения СППШ в кластере, превышение которого сигнализирует о наличии ПП;
производят расширение признаков обнаружения ПП.
2. Способ по п. 1, отличающийся тем, что совокупность параметров, предоставляющих возможность регулировать картографирование ПП с различным доплеровским спектром, включает в себя значение критерия обнаружения ПП, минимально и максимально возможные значения аккумулированных признаков СППШ, интервалы по дальности, азимуту и углу места, характеризующие размер кластера.
3. Устройство межобзорного картографирования на фоне пассивных помех (ПП) для импульсно-доплеровских радиолокационных станций (РЛС) содержит параллельно подключенные первый, второй, n-й блоки обработки входных данных, сигналы с которых передаются на блок отбора максимальных амплитуд в кластерах, блок суммирования признаков обнаружения в кластерах, а также блок логического элемента И, с выхода которого передается сигнал, содержащий объединенные признаки окончаний записи данных, на блок запуска очистки признаков обнаруженных ПП, а также сигнал запуска расчета информации поступающий на входы блоков отбора максимальных амплитуд в кластерах и суммирования признаков обнаружения в кластерах, выходные сигналы которых поступают в блок записи информации о кластерах, далее с первого выхода, сигнал поступает на блок сумматора циклов обзора и, через блок записи, передается на блок хранения информации о СППШ, блок проверки информации СППШ, блок критерия проверки информации о СППШ при этом через второй выход блока записи информации о кластерах сигнал передается на блок хранения информации кластеров и далее через блок чтения информации о кластерах в блок формирователя признаков СППШ, куда также поступает информация о пороге с блока порога, где значения данные сигналов сравниваются, определяя наличие СППШ в кластерах, после чего сигнал, содержащий сформированные признаки, передается в блок аккумулирования признаков СППШ, далее корректируются в блоке корректировки информации о СППШ с учетом критериев с блока формирователя критериев корректировки информации о СППШ и передаются через блок записи информации о СППШ в блок хранения информации о СППШ, а затем через блок чтения информации о СППШ сигнал поступает на блок формирователя признаков обнаружения ПП, где сигнал, содержащий аккумулированные признаки СППШ в кластерах сравниваются с критерием обнаружения ПП с блока формирователя критериев обнаружения ПП и через блок записи, передаются в блок хранения признаков обнаруженных ПП и далее в блок чтения признаков обнаруженных ПП и в блок расширения стробов ПП, на выходе которого будут сформированы признаки обнаруженных ПП и признаки расширения обнаруженных ПП.
| МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПАССИВНЫХ ПОМЕХ ПРИ ИСПОЛЬЗОВАНИИ ЛЧМ СИГНАЛОВ | 2012 |
|
RU2510863C1 |
| МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПОМЕХ | 1985 |
|
RU2040802C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2015 |
|
RU2594005C1 |
| RU 2052836 C1, 20.01.1996 | |||
| СОЛОНАР А.С., ГОРШКОВ С.А., ХМАРСКИЙ П.А., ВАШКЕВИЧ А.М | |||
| Межобзорная компенсация дискретных мешающих отражений с формированием карты помех и накоплением решений // Журнал "Доклады Белорусского государственного | |||

