Изобретение относится к авиационному приборостроению, а именно к устройствам определения угла атаки самолета.
Известен автомат определения и индикации углов атаки и перегрузок АУАСП-Р, включающий в себя датчик углов атаки, выход которого соединен с первым входом следящей системы, второй вход которого соединен с элементом отработки (потенциометром обратной связи) индикатора углов атаки, а выход с двигателем-редуктором, расположенным также в индикаторе.
Это устройство обеспечивает экипаж информацией о текущем значении угла атаки с момента включения автомата.
Однако здесь имеются существенные недостатки, заключающиеся в следующем.
1. Любой отказ в цепи вычисления угла атаки приводит или к потере информации о текущих значениях угла атаки, или к выдаче недостаточной информации без какой-либо сигнализации об этом экипажу.
2. Информация, предоставляемая экипажу, недостоверна из-за неучета влияния на местные потоки, в которых устанавливается чувствительный элемент датчика углов атаки, других параметров полета, среди которых основное влияние оказывает угол скольжения самолета.
Известно также устройство определения индикации и сигнализации углов атаки и перегрузок УДУА-6, принятое за прототип, содержащее два датчика угла атаки, которые для последующей компенсации влияния угла скольжения на местный угол атаки, устанавливаются на противоположных бортах (левом и правом) самолета, усредняющее устройство, вычислитель истинного угла атаки и блок контроля, причем выход левого датчика угла атаки одновременно подключен к первым входам блока контроля и усредняющего устройства, выход правого датчика угла атаки одновременно подключен к вторым входам блока контроля и усредняющего устройства, выход усредняющего устройства подключен к входу вычислителя истинного угла атаки, а с выходов вычислителя истинного угла атаки и блока контроля информация (истинный угол атаки и сигнализация исправности канала формирования угла атаки соответственно) выдается соответствующему потребителю (для целей индикации, сигнализации, САУ и т.д.).
Данное устройство формирует сигнал истинного угла атаки по следующей зависимости:
αист Kα ˙αср+ αо где αcp=  среднее значение местного угла атаки.
среднее значение местного угла атаки.
Kα коэффициент перехода от местных углов атаки к истинным;
α о истинный угол атаки при нулевом значении местного угла атаки;
α мест.лев, α мест.прав сигналы местного угла атаки, снимаемые с левого и правого датчиков соответственно.
Сигнал исправности канала угла атаки формируется в блоке контроля и выдается в случае превышения абсолютной разности значений левого и правого углов атаки определенной, заранее заданной и уточненной по результатам летных испытаний величины.
Данное устройство свободно от второго недостатка, отмеченного для аналога, однако в нем продолжает присутствовать первый, что существенно снижает безопасность пилотирования.
Целью изобретения является повышение безопасности полета путем резервирования и контроля датчиков угла атаки.
На чертеже представлено устройство формирования угла атаки самолета.
Устройство содержит первый датчик 1 угла атаки, второй датчик 2 угла атаки; датчик 3 веса, датчик 4 скоростного напора, датчик 5 нормальной перегрузки, задатчик 6 начального значения коэффициента подъемной силы, датчик 7 текущего положения закрылков, датчик 8 состояния шасси, задатчик 9 начального значения крутизны наклона характеристики подъемной силы в функции угла атаки, датчик 10 числа Маха, задатчик 11 порогового значения числа Маха, первый блок 12 формирования истинного значения угла атаки, второй блок 13 формирования истинного значения угла атаки, масштабный усилитель 14, первый сумматор 15, второй сумматор 16, третий сумматор 17, компаратор 18, первый блок 19 деления, первый коммутатор 20, второй коммутатор 21, блок 22 умножения, четвертый сумматор 23, второй блок 24 деления, блок 25 контроля, блок 26 коммутации, усредняющее устройство 27.
Устройство работает следующим образом.
Сигналы с датчиков 1 и 2 угла атаки поступают соответственно на входы первого и второго блоков формирования сигналов истинного значения углов атаки 12 и 13, в которых формируются сигналы истинного угла атаки соответственно по следующим зависимостям:
α 1= Kα ˙αлевмест+ α о и
α 2= Kα ˙αправмест+ α о
Cформированные по этим зависимостям сигналы α 1 и α 2 подаются далее через блок коммутации 26 на первый и второй входы усредняющего устройства 27. На третий вход усредняющего устройства также через коммутатор 26 подается сигнал истинного угла атаки α3, вычисленный косвенным методом, который заключается в следующем.
Нормальная перегрузка nу, измеряемая датчиком в связанных осях определяется выражением
nу= 
 а учитывая то, что для режимов горизонтального полета G=Y= Cугп.˙q˙S получают nу=
а учитывая то, что для режимов горизонтального полета G=Y= Cугп.˙q˙S получают nу=  где Су текущий коэффициент подъемной силы;
где Су текущий коэффициент подъемной силы;
q скоростной напор;
S эффективная площадь крыла;
G текущий вес самолета;
Y подъемная сила самолета;
Cугп=  коэффициент подъемной силы при горизонтальном полете.
коэффициент подъемной силы при горизонтальном полете.
Коэффициент подъемной силы связан с углом атаки следующей зависимостью:
Cу= Суо+ Cyα α где Суо начальное значение коэффициента подъемной силы, соответствующей α0;
Cyα крутизна наклона характеристики коэффициента подъемной силы по углу атаки.
Выражая угол атаки через коэффициент подъемной силы, получают
α = 
Определяющее влияние на значения Cyα и Суо оказывают число М, механизация крыла, конкретно текущее положение закрылков и взлетно-полетно-посадочная конфигурация самолета.
В соответствии с этим, а также данными моделирования значения СуоCyα можно определить следующим образом.
C =
= 



C




 где, δ3 текущее положение угла отклонения закрылков;
где, δ3 текущее положение угла отклонения закрылков;
K1, K2, K3 коэффициенты пропорциональности, определяемые эмпирически;
Суо1, Суо2 начальные значения коэффициента подъемной силы, определяемые эмпирически;
Cyнα значение крутизны наклона Су по углу атаки до определенного значения числа М=Мо.
Значения Cyнα и Мо определяются эмпирически.
Следует отметить, что данный метод определения угла атаки справедлив только для области линейного участка зависимости Су=f(α ) для данного типа самолета.
Однако, учитывая то, что диапазон эксплуатационных углов атаки самолета ограничивается линейной частью характеристики Су=f(α ) и составляет 70-80% от Судоп, а также результаты проведенного моделирования, можно сделать вывод о том, что данный метод с достаточной степенью точности подходит для определения угла атаки для целей систем предупреждения, применяемых на неманевренных тяжелых самолетах, так как отклик экипажа или САУ на появление предупредительной сигнализации регламентируется основными требованиями к безопасности полетов и самолет однозначно должен быть выведен в зону разрешенных для эксплуатации углов атаки.
Итак сигнал с датчика веса 3 поступает на масштабный усилитель 14, в коэффициент передачи которого заложена эффективная площадь крыла для данного типа самолета (Кп= 1/S). Сформированный сигнал G/S с выхода масштабного усилителя 14 поступает на первый вход первого блока деления 19, на второй вход которого поступает сигнал скоростного напора с датчика 4. В блоке 19 происходит операция деления сигналов и сформированный сигнал Cугп=  с выхода блока 19 поступает на вход блока умножения 22, на второй вход которого поступает сигнал нормальной перегрузки nу с датчика 5. В умножителе происходит операция перемножения сигналов Сугп и nу и сформированный сигнал Сугп.nупоступает на первый вход первого сумматора 15. С первого и второго выходов задатчика 6 начального значения коэффициента подъемной силы Су01и Су02 подаются соответственно на первые входы второго и третьего сумматоров 16 и 17, на вторые входы которых одновременно подается сигнал текущего положения закрылков с выхода датчика 7. В сумматорах 16 и 17 происходит операция суммирования сигналов Су01 +Кi δ3 и Су02+ К2 δ3соответственно. Сформированные сигналы поступают на первый и второй управляемые входы второго коммутатора 20, на управляющий вход которого подается сигнал шасси убрано или шасси выпущено с выхода датчика 8. При наличии на своем управляющем входе сигнала шасси убрано, коммутатор 20 пропускает на выход сигнал первого управляемого входа Су01 + К1 δ3, при смене сигнала на управляющем входе (т.е. появления сигнала шасси выпущено), коммутатор 20 пропускает на выход сигнал второго управляемого входа Су02+ К2 δ3.
с выхода блока 19 поступает на вход блока умножения 22, на второй вход которого поступает сигнал нормальной перегрузки nу с датчика 5. В умножителе происходит операция перемножения сигналов Сугп и nу и сформированный сигнал Сугп.nупоступает на первый вход первого сумматора 15. С первого и второго выходов задатчика 6 начального значения коэффициента подъемной силы Су01и Су02 подаются соответственно на первые входы второго и третьего сумматоров 16 и 17, на вторые входы которых одновременно подается сигнал текущего положения закрылков с выхода датчика 7. В сумматорах 16 и 17 происходит операция суммирования сигналов Су01 +Кi δ3 и Су02+ К2 δ3соответственно. Сформированные сигналы поступают на первый и второй управляемые входы второго коммутатора 20, на управляющий вход которого подается сигнал шасси убрано или шасси выпущено с выхода датчика 8. При наличии на своем управляющем входе сигнала шасси убрано, коммутатор 20 пропускает на выход сигнал первого управляемого входа Су01 + К1 δ3, при смене сигнала на управляющем входе (т.е. появления сигнала шасси выпущено), коммутатор 20 пропускает на выход сигнал второго управляемого входа Су02+ К2 δ3.
Таким образом, сформированный сигнал Су6 с выхода коммутатора 20 подается на второй вход первого у сумматора 15 (на его первом входе присутствует сигнал Сугп˙nу). В сумматоре 23 производится операция вычитания сигналов, т. е. формируется сигнал Сугп.nу-Су0, который с выхода сумматора подается на первый вход второго делителя 24.
Сигнал Cyнα с выхода задатчика 9 подается одновременно на первый вход четвертого сумматора 23 и первый вход второго коммутатора 21. Сигналы текущего значения числа М(М) с выхода датчика 10 поступают одновременно на второй вход четвертого сумматора 23 и первый вход компаратора 18, а сигнал порогового значения числа М (Мо) с выхода задатчика 11 поступает одновременно на третий вход сумматора 23 и второй вход компаратора 18. В сумматоре 23 формируется сигнал Cyнα +К3(М-Мo), который поступает далее на второй вход второго коммутатора 21. Компаратор 18 сравнивает сигналы М и Мо и формирует два управляющих сигнала М ≅ Мо и М>Мо, которые по одной линии связи подаются на управляющий вход третьего коммутатора 21. При наличии команды М ≅ Мокоммутатор 21 пропускает на выход сигнал Cyнα а при наличии команды М>Мо сигнал Cyнα +К3(М-Мо). Сигнал Cyα с выхода коммутатора 21 подается на второй вход второго делителя 24. В делителе 24 происходит операция деления сигнала Сугп.nу-Су0 (сигнал первого входа) на сигнал Cyα которой завершается процесс формирования сигнала α3=  который с выхода делителя 24 подается через блок коммутации 26 на третий вход усредняющего устройства 27. В усредняющем устройстве формируется среднее значение сигналов
который с выхода делителя 24 подается через блок коммутации 26 на третий вход усредняющего устройства 27. В усредняющем устройстве формируется среднее значение сигналов  и с его выхода выдается потребителю, а также на четвертый вход блока контроля 25, на первый, второй и третий входы которого подаются сигналы α1, α 2, α3соответственно с выходов блоков 12, 13 и 14. В блоке контроля 25 производится сравнение среднего значения
и с его выхода выдается потребителю, а также на четвертый вход блока контроля 25, на первый, второй и третий входы которого подаются сигналы α1, α 2, α3соответственно с выходов блоков 12, 13 и 14. В блоке контроля 25 производится сравнение среднего значения  с абсолютными значениями сигналов α1, α2, α 3 (с каждым в отдельности) и формирование их сигналов исправности (отказов). Сигналы исправности формируются на основе сравнения величины разности между средним значением угла атаки и абсолютным значением соответствующего подканала вычисления угла атаки с определенной, заранее выбранной величиной, которая в совокупности включает в себя и методические и инструментальные погрешности. На основе сформированных таким образом сигналов исправности (отказов) трех каналов вычисления в блоке контроля формируется также сигнал полного отказа всех каналов вычисления, заключающийся в отказе двух любых каналов. Сигналы отказов (исправности отдельных каналов вычисления и сигнал полного отказа поступают с выхода блока контроля 25 на первый, второй, третий и четвертый входы четвертого коммутатора 26 и одновременно потребителю. В коммутаторе 26 происходит процесс управления сигналами, вычисленными всеми тремя каналами, заключающийся в том, что при наличии всех сигналов исправности коммутатор пропускает на усредняющее устройство 27 все три сигнала α1, α2, α3, а при отказе любого из них на усредняющее устройство поступает только два исправных сигнала.
с абсолютными значениями сигналов α1, α2, α 3 (с каждым в отдельности) и формирование их сигналов исправности (отказов). Сигналы исправности формируются на основе сравнения величины разности между средним значением угла атаки и абсолютным значением соответствующего подканала вычисления угла атаки с определенной, заранее выбранной величиной, которая в совокупности включает в себя и методические и инструментальные погрешности. На основе сформированных таким образом сигналов исправности (отказов) трех каналов вычисления в блоке контроля формируется также сигнал полного отказа всех каналов вычисления, заключающийся в отказе двух любых каналов. Сигналы отказов (исправности отдельных каналов вычисления и сигнал полного отказа поступают с выхода блока контроля 25 на первый, второй, третий и четвертый входы четвертого коммутатора 26 и одновременно потребителю. В коммутаторе 26 происходит процесс управления сигналами, вычисленными всеми тремя каналами, заключающийся в том, что при наличии всех сигналов исправности коммутатор пропускает на усредняющее устройство 27 все три сигнала α1, α2, α3, а при отказе любого из них на усредняющее устройство поступает только два исправных сигнала.
При отказе (последовательном во времени) любого из оставшихся исправных сигналов, блок контроля 25 выдает сигнал полного отказа и коммутатор 26 отключает от усредняющего устройства оба оставшихся сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ИЗМЕРИТЕЛЯ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079142C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УГЛА АТАКИ САМОЛЕТА | 2005 |
|
RU2281882C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ПИЛОТАЖНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
RU2043945C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ГАЗОВОГО ПОТОКА | 1992 |
|
RU2060503C1 |
| СИСТЕМА СИГНАЛИЗАЦИИ ВЫСОТЫ ЭШЕЛОНА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1823665A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2103718C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2241247C1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ВОЗДУШНОЙ СКОРОСТИ | 2010 |
|
RU2445634C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
Изобретение относится к авиационному приборостроению, а именно к устройствам определения угла атаки самолета. Цель изобретения является повышение безопасности полета, путем резервирования и контроля датчиков угла атаки. В устройство дополнительно вводят датчик веса 3, датчик скоростного напора 4, датчик нормальной перегрузки 5, задатчик начального значения коэффициента подъемной силы 6, датчик текущего положения закрылов 7, датчик состояния шасси 8, задатчик начального значения крутизны наклона характеристики подъемной силы в функции угла атаки 9, датчик числа Маха 10, задатчик порогового значения числа Маха 11, второй блок формирования истинного значения угла атаки 13, масштабный усилитель 14, первый, второй и третий сумматоры 15, 16, 17, компаратор 18, первый и второй блоки деления 19, 24, первый и второй коммутаторы 20, 21, блок умножения 22 и четвертый сумматор 23. 1 ил.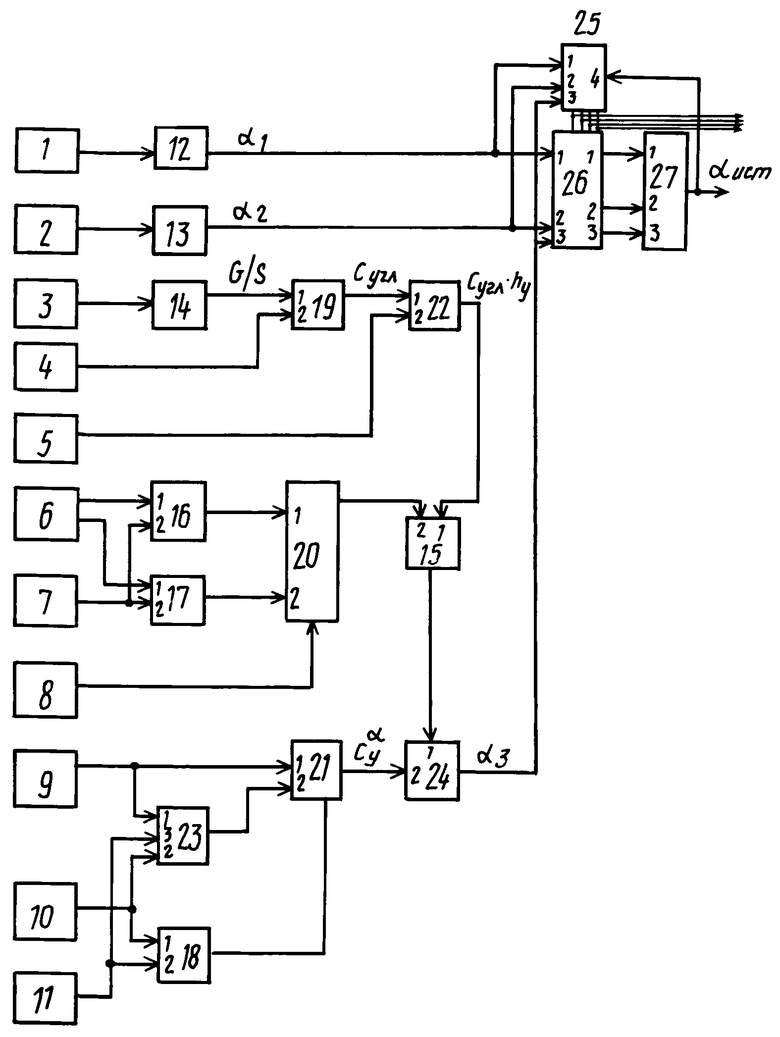
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ САМОЛЕТА, содержащее последовательно соединенные первый датчик угла атаки и первый блок формирования истинного значения угла атаки, второй датчик угла атаки, усредняющее устройство и блок контроля, отличающееся тем, что, с целью повышения безопасности полета путем резервирования и контроля датчиков угла атаки, в него дополнительно введены второй блок формирования истинного значения угла атаки, вход которого соединен с выходом второго датчика угла атаки, блок коммутации, первый, второй и третий выходы которого соединены с первым, вторым и третьим входами усредняющего устройства, выход которого является выходом устройства для определения угла атаки, последовательно соединенные датчик веса, масштабный усилитель, первый блок деления, блок умножения, первый сумматор и второй блок деления, выходы первого и второго блоков формирования сигналов истинного значения угла атаки и второго блока деления соединены соответственно с первым, вторым и третьим входами блока контроля и блока коммутации, четвертый вход блока контроля соединен с выходом усредняющего устройства, первый, второй, третий и четвертый выходы блока контроля соединены с четвертым, пятым, шестым и седьмым входами блока коммутации, датчик скоростного напора, выход которого соединен с вторым входом первого блока деления, и датчик нормальной перегрузки, выход которого соединен с вторым входом блока умножения, последовательно соединенные задатчик начальных значений коэффициента подъемной силы, второй сумматор и первый коммутатор, выход которого соединен с вторым инверсным входом первого сумматора, третий сумматор, выход которого соединен с вторым входом первого коммутатора, а первый вход с вторым выходом задатчика начальных значений коэффициента подъемной силы, датчик текущего положения закрылков, выход которого соединен с вторыми входами второго и третьего сумматоров соответственно, и датчик состояния шасси, выход которого соединен с управляющим входом первого коммутатора, второй коммутатор, выход которого соединен с вторым входом второго блока деления, четвертый сумматор и компаратор, задатчик начального значения крутизны наклона характеристики подъемной силы в функции угла атаки, выход которого соединен соответственно с первыми входами второго коммутатора и четвертого сумматора, датчик числа Маха, выход которого соединен соответственно с вторым входом четвертого сумматора, выход которого соединен с вторым входом второго коммутатора, и первым входом компаратора, выход которого соединен с управляющим входом второго коммутатора, задатчик порогового значения числа Маха, выход которого соединен с третьим инверсным входом четвертого сумматора и вторым входом компаратора соответственно.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ватерпас с маятником | 1926 |
|
SU6456A1 |
