Изобретение относится к авиационному приборостроению, а именно к устройствам для ограничения пилотажных параметров летательного аппарата.
Известно устройство для ограничения пилотажных параметров летательного аппарата, содержащее датчики: угла атаки, числа М, положения органов механизации крыла, стреловидности крыла, вариантов весовой загрузки, скорости, высоты, вариантов внешних подвесок, перегрузки, блоки индикации и сигнализации, блоки сравнения, блоки формирования: предельно допустимой перегрузки, предельно-допустимого угла атаки, минимально допустимой скорости, максимально допустимой скорости, максимально допустимого числа М; дифференцирующие блоки и сумматоры, блоки сравнения, индикаторы текущей и минимально допустимой скорости и индикаторы текущей и максимально допустимой скорости.
В известном техническом решении при приближении текущего угла атаки к предельно допустимому углу атаки или текущей скорости к минимально допустимой скорости, или текущего числа М к его максимально допустимому значению блоки сравнения, соответствующие данным соединениям, выдают сигналы в блок сигнализации, который сигнализирует о наступлении критического режима сваливания летательного аппарата. При приближении же текущей перегрузки к предельно допустимой или текущей скорости к максимально допустимой (на малых высотах) блоки сравнения, соответствующие данным соединениям, выдают сигналы на блок сигнализации, который сигнализирует о наступлении критического режима достижении предельно допустимых перегрузок. Соответствующие запасы по сваливанию оцениваются пилотом с помощью блока индикации визуально на индикаторах текущего и предельно допустимого углов атаки, индикаторах текущей скорости и максимально допустимой скорости, и индикаторах текущей скорости и минимально допустимой скорости.
Известное устройство позволяет обеспечить предупреждение выхода летательного аппарата на критические режимы сваливания и разрушение конструкции летательного аппарата на всех режимах полета. Однако при переходе с режима ручного управления скоростью на режим автоматического выдерживания заданной пилотом скорости, пилот ошибочно может задать скорость выше максимально допустимой, либо ниже минимально допустимой. Кроме того, возможно существенное изменение границы области предельно допустимых скоростей и выход заданной пилотом скорости за ее допустимые значения (например заход на посадку). Такое пилотирование, например при заходе на посадку, где стабилизация скорости особенно необходима, связано, во-первых, со значительной психологической и информационной нагрузкой экипажа и усложнением процесса пилотирования, а, во-вторых, с опасностью сваливания по скорости и потери глиссады.
Цель изобретения повышение безопасности пилотирования.
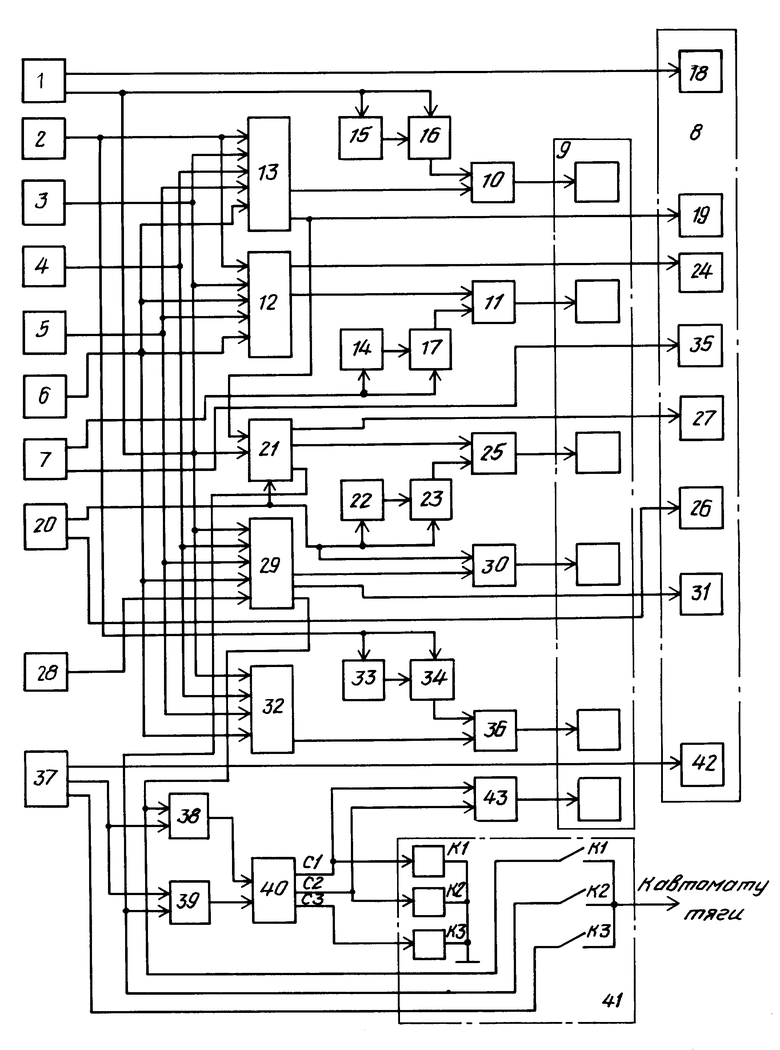
На чертеже представлена блок-схема устройства для ограничения пилотажных параметров.
Устройство содержит датчик 1 угла атаки, датчик 2 числа М, датчик 3 положения органов механизации крыла, датчик 4 стреловидности крыла, датчик 5 вариантов весовой загрузки, датчик 6 вариантов внешних подвесок, датчик 7 перегрузок, блок 8 индикации, блок 9 сигнализации, первый и второй блоки 10 и 11 сравнения, блок 12 формирования предельно допустимой перегрузки, блок 13 формирования предельно допустимого угла атаки, первый и второй дифференцирующие блоки 14, 15 и первый и второй сумматоры 16, 17, индикатор 18 текущего угла атаки и индикатор 19 допустимого угла атаки, датчик 20 скорости, блок 21 формирования минимально допустимой скорости, третий дифференцирующий блок 22 и третий сумматор 23, индикатор 24 предельно допустимой перегрузки, третий блок 25 сравнения, индикаторы 26, 27 соответственно текущей и минимально допустимой скорости, датчик 28 высоты, блок 29 формирования максимально допустимой скорости, четвертый блок 30 сравнения, индикатор 31 максимально допустимой скорости, блок 32 формирования максимально допустимого числа М, четвертый дифференцирующий блок 33 и четвертый сумматор 34, индикатор 35 текущей перегрузки, пятый блок 36 сравнения, задатчик 37 скорости, который может быть выполнен на основе потенциометра, шестой и седьмой блоки 38, 39 сравнения дешифратор 40, блок 41 коммутации, представляющий собой совокупность электронных ключей, индикатор 42 заданной скорости, логический элемент ИЛИ 43.
Устройство работает следующим образом.
Сигналы с датчика 1 угла атаки, датчика 7 перегрузок и датчика 20 скорости поступают на блок 8 индикации и через цепи блоков 14, 16 и 15, 17, 22, 23 на вход соответствующих блоков 10, 11, 25 и 36 сравнения.
Сигналы с датчика 2 числа М, датчика 3 положения органов механизации крыла, датчика 4 угла стреловидности крыла, датчика 5 вариантов весовой загрузки и датчика 6 вариантов внешних подвесок поступают на входы блока 13 формирования предельно допустимого угла атаки и блока 12 формирования предельно допустимой перегрузки.
Сигналы с датчиков 3, 4, 5, 6 вместе с сигналом датчика 28 высоты поступают на блок 29 формирования максимально допустимой скорости. Сигналы с датчиков 3, 4, 5, 6 поступают на блок 32 формирования максимально допустимого числа М. Сигналы с блока 13 предельно допустимого угла атаки, датчика 1 угла атаки и датчика 20 скорости поступают на блок 21 формирования минимально допустимой скорости, сигнал с датчика 2 числа М через цепь блоков 33, 34 поступает на вход блока 30 сравнения.
При приближении текущего угла атаки к предельно допустимому углу или текущей скорости к минимально допустимой скорости или текущего числа М к его максимально допустимому значению блоки 10, 25, 30 сравнения соответственно выдают сигналы на блок 9 сигнализации, который сигнализирует о наступлении критического режима сваливания летательного аппарата. При приближении текущей перегрузки к предельно допустимой или текущей скорости к максимально допустимой (на малых высотах) блоки 11, 36 сравнения соответственно выдают сигналы на блок 9 сигнализации, который сигнализирует о наступлении критического режима достижения предельно допустимых нагрузок.
Соответствующие запасы по параметрам полета оцениваются пилотом с помощью блока 8 индикации визуально на индикаторах 18 и 19 текущего и предельно допустимого углов атаки, индикаторах 26, 31 текущей и максимально допустимой скорости, индикаторах 26, 27 текущей скорости и минимально допустимой скорости.
При задании пилотом требуемой скорости полета в автоматическом режиме посредством задатчика 37 сигнал, пропорциональный этой скорости, с выхода задатчика поступает на вход индикатора 42 заданной скорости и на второй вход блоков 38 и 39 сравнения.
На первый и вход блока 38 сравнения с блока 29 формирования максимально допустимой скорости подается сигнал, пропорциональный максимально допустимой скорости полета Vmax доп. а на первый вход блока сравнения 39 с выхода блока 21 формирования минимально допустимой скорости подается сигнал, пропорциональный минимально допустимой скорости полета Vminдоп.
Заданная пилотом скорость Vзад полета в устройстве 38 сравнивается с максимально допустимыми, а в устройстве 29 с минимально допустимыми ее значениями. В процессе эксплуатации возможны следующие случаи задания скорости: заданная скорость больше максимально допустимой, заданная скорость меньше минимально допустимой, заданная скорость меньше минимально допустимой, заданная скорость находится между максимально допустимым и минимально допустимым значениями.
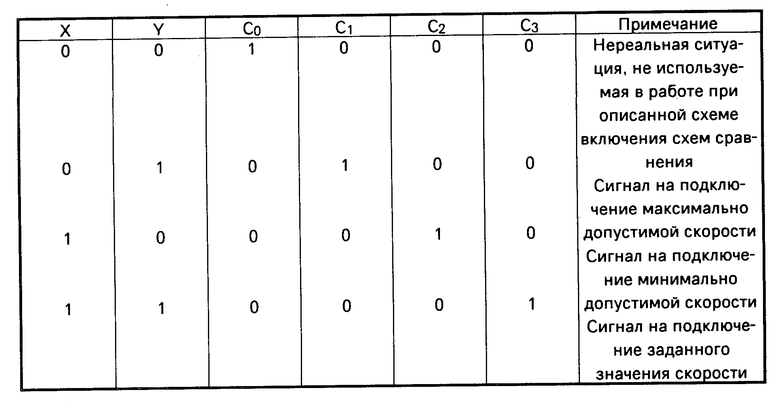
Выходной сигнал блоков 38, 39 сравнения при этом принимает соответственно логические значения
x 





y 





Работа дешифратора описывается таблицей истинности в соответствии с логическими уравнениями:
co=  ∧
∧  c1=
c1=  ∧ y
∧ y
c2= x ∧  c3= x ∧ y где С2, С0, С1, С3 выходные логические сигналы дешифратора 40;
c3= x ∧ y где С2, С0, С1, С3 выходные логические сигналы дешифратора 40;
х, у выходные сигналы устройств 38, 39 сравнения.
Как видно из таблицы, сигнал С0 при описанной схеме включения схем сравнения появиться не может. Сигнал С1 появляется тогда, когда значение заданной скорости больше его максимально допустимого значения; С2 когда заданное значение скорости меньше его минимально допустимого значения; С3 когда заданное значение скорости находится между максимально допустимым и минимально допустимым значениями.
Сигналы С1, С2, С3 с трех выходов дешифратора 40 поступают на три управляющих входа блока 41 коммутации, осуществляющего коммутацию на его информационный выход либо сигнала соответствующего максимально допустимому значению скорости, если значение заданной скорости оказалось больше максимально допустимого значения, либо сигнал соответствующий минимально допустимому значению скорости, если значение заданной скорости оказалось меньше минимально допустимого значения, и сигнал соответствующий заданному значению скорости, если значение заданной скорости находится между максимально допустимым и минимально допустимым ее значениями.
Сигнал с информационного выхода блока коммутации 41, представляющий собой заданную пилотом и ограниченную сверху и снизу (из условия безопасности) скорость полета в режиме ее автоматического выдерживания, далее поступает на автомат тяги, (или в САУ), чем и предотвращается во всех условиях эксплуатации опасные последствия ошибочных действий пилота как непосредственно при задании скорости, так и в процессе ее автоматического выдерживания через посредство автомата тяги (или САУ), когда изменившиеся условия полета (изменение высоты, выпуск механизации и пр.) приводят к тому, что заданная пилотом скорость становится выше или ниже допустимой.
Задаваемая пилотом посредством задатчика 37 скорость индицируется на индикаторе 42, что позволяет пилоту, при нали- чии индикатора 31 максимально допустимой и индикатора 27 минимально допустимой скоростей, визуально оценивать факти- ческий запас безопасности по скорости.
Логические сигналы С1 и С2 с выхода дешифратора 40 поступают на вход ячейки ИЛИ 43, с выхода которой на блок 9 сигнализации выдается сигнал в тех случаях, когда заданная пилотом посредством задатчика 37 скорость выше или ниже предельно допустимой. Это позволяет посредством сигнализации предупредить пилота о его неправильных действиях в момент задания скорости и в процессе автоматического выхода летательного аппарата на заданную пилотом скорость, в тех случаях когда изменения условий полета приводят к значительному изменению предельно допустимых значений скорости по сравнению с их значениями в момент задания пилотом требуемой скорости полета в автоматическом режиме. Так, например, это возможно, когда скорость задается пилотом перед взлетом. В этом случае при приближении границы зоны предельно допустимых скоростей к заданной пилотом скорости будет срабатывать предупреждающая сигнализация еще до того, как текущая скорость в процессе автоматического управления достигнет заданного значения. Этот сигнал своевременно предупредит пилота о его неправильных действиях.
Таким образом, предложенное устройство позволяет в полной мере обеспечить предупреждение выхода летательного аппарата на критические режимы на всех режимах полета, в том числе и при управлении скоростью летательного аппарата через задатчик скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ САМОЛЕТА | 1988 |
|
RU2041136C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УГЛА АТАКИ САМОЛЕТА | 2005 |
|
RU2281882C1 |
| СПОСОБ КОНТРОЛЯ ИЗМЕРИТЕЛЯ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079142C1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ПИЛОТАЖНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1795624A1 |
| СИСТЕМА СИГНАЛИЗАЦИИ ВЫСОТЫ ЭШЕЛОНА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1823665A1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2653417C1 |
| СПОСОБ АНТИШТОПОРНОГО УПРАВЛЕНИЯ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2368541C2 |
| СИГНАЛИЗАТОР КРИТИЧЕСКОГО УГЛА ТАНГАЖА | 1992 |
|
RU2057293C1 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ ОТКЛОНЕНИЯ ОТ ЗАДАННОЙ ВЫСОТЫ ЭШЕЛОНА И ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2410743C1 |
Изобретение относится к авиационному приборостроению. Цель изобретения повышение безопасности пилотирования летательного аппарата. Изобретение позволяет обеспечить безопасность пилотирования летательного аппарата с сохранением необходимого запаса по сваливанию и прочности на всех режимах полета, включая и режим управления скоростью летательного аппарата посредством задатчика скорости. Это достигается путем индикации задаваемой посредством задатчика скорости, сравнения этой скорости с вычисленными максимально и минимально допустимыми значениями скорости в блоках выдачи сигнализации в случае, когда заданная скорость выйдет за границы допустимых значений скорости, и выдачи на отработку заданной скорости, ограниченной сверху максимально допустимым и снизу минимально допустимым значениями. 1 ил. 1 табл.
УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ПИЛОТАЖНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащее датчик угла атаки, датчик числа Маха, датчик положения органов механизации крыла, датчик угла стреловидности крыла, датчик вариантов весовой загрузки, датчик вариантов внешних подвесок, датчик перегрузки, датчик скорости, датчик высоты, блок формирования предельно допустимого угла атаки, блок формирования предельно допустимой перегрузки, блок формирования минимально допустимой скорости, блок формирования максимально допустимой скорости, блок формирования максимально допустимого числа Маха, первый-четвертый дифференцирующие блоки, первый четвертый сумматоры, первый-пятый блоки сравнения, блок сигнализации и блок индикации с индикаторами текущей, максимально и минимально допустимой скорости, угла атаки, допустимого угла атаки, текущей и предельно допустимой перегрузки, при этом первый-пятый входы блока формирования предельно допустимого угла атаки и первый пятый входы блока формирования предельно допустимой перегрузки соединены соответственно с входами датчика числа Маха, датчика положения органов механизации крыла, датчика угла стреловидности крыла, датчика вариантов весовой загрузки и датчика вариантов внешних подвесок, первый - четвертый входы блоков формирования максимально допустимой скорости и максимально допустимого числа Маха соединены соответственно с выходами датчиков положения органов механизации крыла, угла стреловидности крыла, вариантов весовой загрузки и вариантов внешних подвесок, пятый вход блока формирования максимально допустимой скорости соединен с выходом датчика высоты, первый третий входы блока формирования минимально допустимой скорости соединены соответственно с выходами блока формирования предельно допустимого угла атаки, датчика угла атаки и датчика скорости, входы соответственно первого-четвертого дифференцирующих блоков и первые входы соответственно первого-четвертого сумматоров соединены с выходами датчика угла атаки, датчика перегрузки, датчика скорости и датчика числа Маха, вторые входы первого-четвертого сумматоров соединены соответственно с выходами первого-четвертого дифференцирующих блоков, а выходы первого-четвертого сумматоров соединены соответственно с первыми входами первого-четвертого блоков сравнения, вторые входы которых соединены соответственно с выходами блоков формирования предельно допустимого угла атаки, предельно допустимой перегрузки, минимально допустимой скорости и максимально допустимого числа Маха, первый и второй входы пятого блока сравнения соединены соответственно с выходами датчика скорости и блока формирования максимально допустимой скорости, выходы первого пятого блоков сравнения соединены с соответствующими входами блока сигнализации, выходы датчика угла атаки, датчика перегрузки, датчика скорости, блоков формирования предельно допустимого угла атаки, предельно допустимой перегрузки, максимально и минимально допустимой скорости соединены с входами соответствующих индикаторов блока индикации, отличающееся тем, что, с целью повышения безопасности пилотирования, в него дополнительно введены задатчик скорости, шестой и седьмой блоки сравнения, дешифратор, блок коммутации, логический элемент ИЛИ и индикатор заданной скорости, при этом выход задатчика скорости соединен с входом индикатора заданной скорости, первый вход шестого блока сравнения и первый вход седьмого блока сравнения, а также первый и второй информационные входы блока коммутации соединены соответственно с выходами блоков формирования максимально и минимально допустимой скорости, вторые входы шестого и седьмого блоков сравнения и третий информационный вход блока коммутации соединены с выходом задатчика скорости, выходы шестого и седьмого блоков сравнения соединены с первым и вторым входами дешифратора, первый, второй и третий входы которого соединены с первым третьим управляющими входами блока коммутации, а первый и второй выходы с первым и вторым входами логического элемента ИЛИ, выход которого соединен с соответствующим входом блока сигнализации.
| Бородин В.Г., Рыльский Г.И | |||
| Пилотажные комплексы и системы управления самолетов и вертолетов | |||
| М.: Машиностроение, 1978, с.116-120,80. |
