Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах управления с дискретным характером технологического цикла.
Известно устройство для контроля динамических сложных систем, содержащее два регистра, блок памяти, генератор тактовых импульсов, группу элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, группу элементов И, два элемента ИЛИ. Устройство распознает критические ситуации, связанные с неадекватной нормальному функционированию динамикой объекта контроля. Контроль основан на анализе переходного инварианта. Переходным инвариантом называется двоичный вектор, содержащий единицы во всех тех разрядах, которые совпадают в двух соседних векторах признаков ситуации. К недостаткам данного устройства относится низкая достоверность контроля из-за неполноты переходного инварианта. Кроме того в устройстве отсутствует формирование управляющих сигналов, следовательно, его нельзя применять для управления.
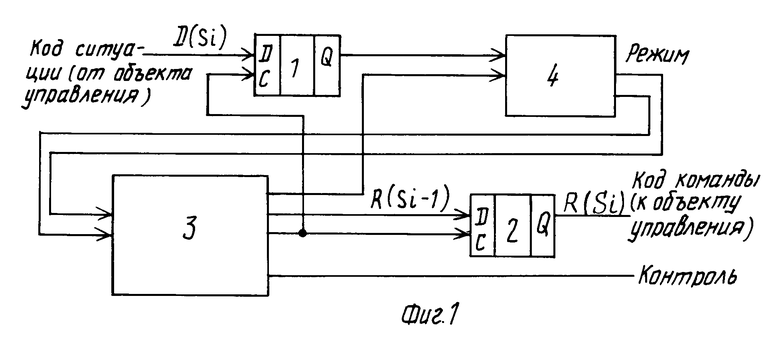
Наиболее близким по сущности и технической реализации к предлагаемому изобретению является известное устройство для ситуационного контроля и управления, выбранное в качестве прототипа. Его функциональная схема представлена на фиг. 1. Прототип содержит первый 1 и второй 2 регистры, блок управления и формирования кодов команд 3 и блок контроля 4, причем блок управления и формирования кодов команд 3 содержит генератор 3.1, блок управления режимами 3.2, счетчик 3.3 и первое запоминающие устройства 3.4, а блок контроля 4 содержит второе 4.1 и третье 4.2 запоминающие устройства первый 4.3 и второй 4.4 блоки сравнения, первую 4.5 и вторую 4.6 группы элементов И.
Прототип осуществляет управление объектом и реализует контроль ситуационной динамики путем анализа переходного инварианта. Под переходным инвариантом понимается двоичный вектор, содержащий единицы во всех тех разрядах, которые совпадают в двух соседних векторах признаков ситуации. Переход является недопустимым, если из ситуации Si 1 при реализации команды управления R(Si) управляемая система перешла в такую ситуацию Si, что разряды кода ситуации D(Si 1), определяемые переходным инвариантом Q(Si 1), изменились. Изменение этих разрядов свидетельствует о том, что система "объект устройство управления " функционирует непредсказуемым образом и требуется вмешательство извне. В этом случае работа устройства управления блокируется.
Прототип работает следующим образом. Двоичный вектор (код ситуации) D(Si 1) от объекта управления поступает на информационные входы первого регистра 1. В момент окончания поиска предыдущей команды управления на выходе первого блока сравнения 4.3 появляется единичный сигнал. Одновременно такой же сигнал появляется на выходе блока сравнения 4.4, поскольку коды ситуаций, поступающие в этот момент на входы первой 4.5 и 4.6 второй группы элементов И совпадают. При этом блок управления режимами 3.2 переводит прототип в режим опроса, т. е. начинает пропускать импульсы от генератора 3.1 на синхровходы первого 1 и второго 2 регистров. По заднему фронту каждого импульса происходит запись кода команды управления из блока управления и формирования кодов команд 3 во второй регистр 2 и кода текущей ситуации в первый регистр 1. Если код текущей ситуации, поступающий из первого регистра 1, совпадает с кодом ситуации, поступающим из второго запоминающего устройства 4.1, то на выходах первого 4.3 и второго 4.4 блоков сравнения по-прежнему продолжают оставаться единичные сигналы, и опрос продолжается.
При изменении кода текущей ситуации на выходе первого блока сравнения 4.3 появляется нулевой сигнал, поскольку коды ситуаций, поступающие на первую и вторую группу входов первого блока сравнения 4.3, уже не совпадают. При этом на первой 4.5 и второй 4.6 группах элементов И происходит логическое умножение двоичного вектора D(Si), поступающего с первого регистра 1, и вектора предшествующей ситуации Si 1, поступающего из блока управления и формирования кодов команд 3 на переходной инвариант Q(Si 1), поступающий из третьего запоминающего устройства 4.2.
Если D(Si) Q(Si 1) D(Si 1) Q(Si 1), то на выходе второго блока сравнения 4.4 останется единичный сигнал. При этом блок управления режимами 3.2 переводит устройство в режим поиска, то есть прекращает пропускать импульсы от генератора 3.1 на синхровходы первого 1 и второго 2 регистров и начинает пропускать их на счетный вход счетчика 3.3. По заднему фронту очередного импульса его содержимое увеличивается на 1, обеспечивая последовательную выборку R(Si 1), D(Si 1) и Q(Si 1) из первого, второго и третьего запоминающих устройств соответственно. Счетчик адресов работает циклически, обеспечивая последовательную выборку всех кодов ситуаций D(Si 1) и всех векторов R(Si 1) и Q(Si1). При совпадении вектора D(Si 1) с вектором текущей ситуации D(Si), хранящимся в первом регистре 1, на выходе первого блока сравнения 4.3 появляется единичный сигнал. Одновременно на выходе второго блока сравнения 4.4 появляется единичный сигнал, и процесс повторяется.
Если при смене кода текущей ситуации на каком-либо шаге условие D(Si) Q(Si 1) D(Si 1) Q(Si 1) не выполняется, то на выходе второго блока сравнения 4.4 появится нулевой сигнал. При этом блок управления режимами 3.2 выдает нулевой сигнал на выходе "Контроль", свидетельствующий о неадекватной реакции объекта управления в ситуации Si на управляющее воздействие с кодом команды R(Si), переводит устройство в режим блокировки, т.е. блокирует подачу импульсов от генератора 3.1, и дальнейшая работа прекращается. В отличии от предыдущего известного устройства, прототип кроме ситуационного контроля формирует управляющие воздействия в виде кодов команд.
К свойствам, характеризующим прототип, относится прежде всего низкая достоверность контроля, так как контролируемая в прототипе система инвариантов является неполной. Например, в прототипе контролируются только те разряды кода ситуации, которые не изменяют своего значения, при этом не контролируются те разряды кода ситуации, значения которых в текущей ситуации являются инверсными по сравнению с предшествующей ситуацией или разряды, которые принимают фиксированные значения (0,1). Кроме того, прототип может контролировать только правильность последовательности поступления кодов ситуации, и не контролирует правильность подачи кодов команд, а, следовательно, не контролирует взаимодействие объекта управления и устройства, вырабатывающего коды команд. Еще одним свойством прототипа является невозможность работы в реальном масштабе времени, т.е. прототип работает не в темпе объекта управления, так как в прототипе предусматривается режим поиска. Следовательно, сужается область применения прототип не может работать на высокой частоте, взаимодействия объекта управления и устройства, которое вырабатывает коды команд, так как в этом случае режим поиска не успевает отработать полностью.
Изобретение решает задачу создания устройства, обладающего высокой достоверностью контроля ситуационной динамики и высокой частоты взаимодействия объекта управления и устройства, вырабатывающего коды команд, что позволит расширить область применения устройства.
Сущность технического решения заключается в том, что в заявляемое устройство для ситуационного контроля и управления, содержащее первый и второй регистры, блок управления и формирования кодов команд и выполненный в виде ПЗУ блок контроля, выход которого соединен с входом задания режима блока управления и формирования кодов команд, при этом информационные выходы первого регистра соединены с первой группой входов блока контроля, синхронизирующий выход блока управления и формирования кодов команд соединен с входами синхронизации первого и второго регистров, группа информационных выходов блока управления и формирования кодов команд соединена с информационными входами второго регистра, сигнализирующий выход блока управления и формирования кодов команд является выходом сигнала "Контроль" устройства, причем блок управления и формирования кодов команд содержит генератор, элемент И и запоминающее устройство, группа информационных выходов которого является выходами блока управления и формирования кодов команд, первый вход элемента И соединен с выходом генератора, дополнительно введены следующие связи: информационные выходы первого регистра соединены с группой информационных входов блока управления и формирования кодов команд, группа информационных выходов которого соединена с второй группой информационных входов блока контроля, причем в блок управления и формирования кодов команд введены третий регистр и второе запоминающее устройство, информационный выход которого соединен с информационными входами третьего регистра, выходы которого соединены с первыми группами входов первого и второго запоминающих устройств, вторые группы входов которых соединены с информационными входами блока управления и формирования кодов команд, выход элемента И соединен с входом синхронизации третьего регистра.
Техническим результатом является высокая достоверность ситуационного контроля, упрощение устройства, возможность контроля правильности взаимодействия объекта управления и устройства, вырабатывающего коды команд, обеспечение реального масштаба времени ситуационного контроля и управления. Это позволяет расширить область применения данного устройства и применять его, например, в области функционального контроля микропроцессорных систем, а не только в области контроля ситуационной динамики при управлении объектами с дискретным характером технологического цикла.
Повышение достоверности контроля достигается за счет полноты контролируемых инвариантов, в качестве которых выступают значения разрядов в кодах предшествующей и текущей ситуаций. Код команды задает значение конкретного разряда кода текущей ситуации, изменяя значение этого разряда в коде предшествующей ситуации. При этом возможны пять видов изменений значения двоичного разряда: 1) инвертирование; 2) установка константы 0; 3) установка константы 1; 4) отсутствие изменения; 5) изменение недетерминированным образом.
В прототипе контролируется отсутствие изменения значений разрядов в кодах предшествующей и текущей ситуаций. В заявляемом изобретении контролируются первые четыре выше перечисленные вида изменений. Для каждого кода команды отыскивается множество запрещенных кодов ситуации и формируется функция ошибки, значение которой заносится в блок контроля, выполненный в виде ПЗУ. Адресация ячеек ПЗУ осуществляется двумя группами адресных входов. Первая группа адресных входов соединена с информационными выходами регистра, хранящего код текущей ситуации, а вторая группа соединена с группой информационных выходов блока управления и формирования кодов команд. Кроме того данные признаки заявляемого изобретения обеспечивают контроль правильности взаимодействия объекта управления и устройства, вырабатывающего коды команд, так как при прошивке ПЗУ блока контроля учтено влияние команд на состояние объекта управления. Причем в качестве объекта управления и устройства, вырабатывающего коды команд, можно использовать функциональные компоненты микропроцессорной системы, что приводит к расширению области применения устройства.
Для обеспечения в реальном масштабе времени ситуационного контроля и управления в реальном масштабе времени в блоке управления и формирования кодов команд прототипа исключен счетчик, обеспечивавший режим поиска, а для выполнения функции управления введен микропрограммный автомат, выполненный на ПЗУ, формирующем функцию переходов и регистре, включенном в цепь обратной связи ПЗУ.
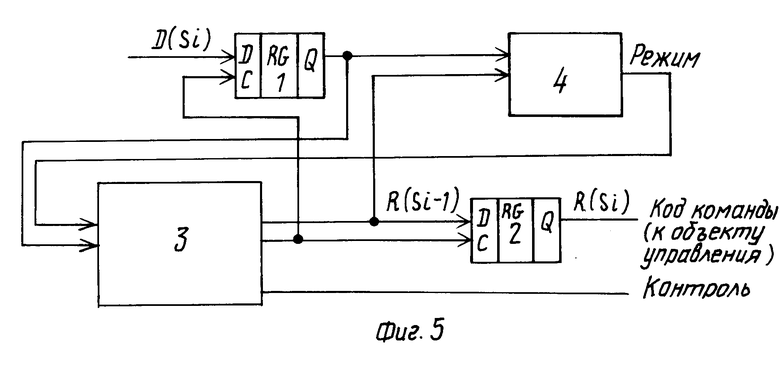
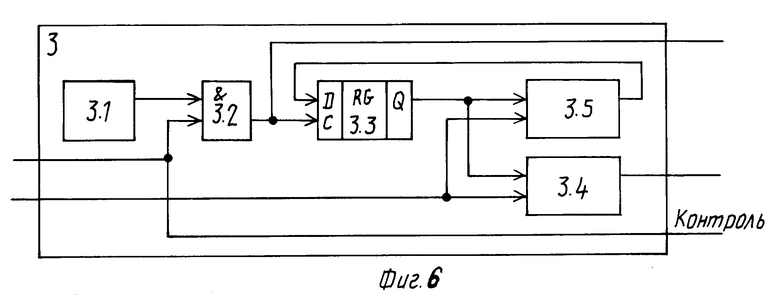
На фиг. 1 изображена функциональная схема прототипа; на фиг. 2 функциональные схемы блока управления и формирования кодов команд 3 и блока контроля 4 прототипа соответственно; на фиг. 4 блок управления режимом 3.2, входящего в состав блока управления и формирования кодов команд 3 прототипа; на фиг. 5 функциональная схема заявляемого устройства; на фиг. 6 блока управления и формирования кодов команд 3, входящего в состав заявляемого устройства.
Карта прошивки ПЗУ первого 3.4 и второго 3.5 запоминающих устройств представлена в таблице.
Заявляемое устройство (фиг. 5) содержит первый 1 и второй 2 регистры, блок управления и формирования кодов команд 3 и блок контроля 4. Причем блок управления и формирования кодов команд 3 (фиг. 6) состоит из генератора 3.1, элемента И 3.2, третьего 3.3 регистра, первого 3.4 и второго 3.5 запоминающих устройств. Блок контроля 4 реализован на ПЗУ. Входом устройства является шина "Код ситуации", а выходами шина "Код команды" и сигнал "Контроль".
Дискретную систему, являющуюся моделью реально протекающих процессов представим состоящей из операционного устройства (ОУ) и устройства управления (УУ), взаимодействующих через два однонаправленных канала связи. От ОУ передаются коды ситуации, а от УУ коды команд. Под правильной ситуационной динамикой будем понимать адекватную реакцию ОУ на вырабатываемые УУ коды команд. Реально допустимыми кодами ситуации могут быть не все возможные коды ситуации, а только m кодов, образующих множество G. Это множество может быть определено путем анализа процессов, описывающих поведение ОУ и УУ. Кроме множества G допустимых кодов ситуации необходимо сформировать множества допустимых кодов ситуаций Gi, вырабатываемых ОУ в ответ на i-тый код команды. Затем каждому множеству ставятся в соответствие две булевы функции F и F':
Fi функция, определяющая принадлежность кода ситуации к допустимому множеству Gi;
Fi' функция, определяющая принадлежность кода ситуации к запрещенным.
Схему обнаружения ошибок можно описать следующей булевой функцией
Fош=  (T
(T & (
& ( F
F ))
)) F′, где n количество вырабатываемых УУ кодов команд;
F′, где n количество вырабатываемых УУ кодов команд;
Тi функция идентификации i-того кода команды, т.е. стробирование момента появления i-того кода команды.
Функция ошибки Fош реализуется блоком 2 контроля, а функции УУ формирование кодов команд реализуются блоком 3 управления и формирования кодов команд.
Устройство работает следующим образом.
В исходном состоянии второй регистр 2 содержит код начальной команды, извлеченный из первого запоминающего устройства 3.4, входящего в состав блока управления и формирования кодов команд 3, настроенного для работы в режиме опроса, когда тактирующие импульсы поступают на синхровходы первого 1 и второго 2 регистров. В ответ на код команды ОУ вырабатывает код ситуации, поступающий на вход устройства. На выходе блока контроля 4 устанавливается единичный уровень, если этот код является допустимым, то есть, если Fош 0.
Если код ситуации относится к запрещенным, то на выходе блока контроля 4 устанавливается нулевой уровень (Fош 1), определяющий режим блокировки, когда прекращается подача тактирующих импульсов на регистры устройства, а, следовательно, прекращается и дальнейшая работа устройства.
Рассмотри на примере более подробно работу заявляемого устройства и синтез кодов, подлежащих записи в запоминающие устройства, входящие в состав блока управления и формирования кодов команд 3 и блока контроля 4.
УУ выдает пятиразрядные унитарные коды команд: Y0Y1Y2Y3Y4.
Поведение УУ описывается как поведение трех взаимодействующих процессов С0, С1, С2. Для каждого процесса задано допустимое множество кодов ситуации: а(С0)03,30,37} a(C1)30,32} a(C2)=03,23}
При описании процесса [3] используется знак следования ->> и знак альтернативного ИЛИ
CO=




 | ввод.30 _→ вывод. Y1 _→ С1
| ввод.30 _→ вывод. Y1 _→ С1
CO=(ввод.30 _→ вывод. Y0 _→ С0 ввод.32 _→ вывод. Y1 _→ С1)
CO=(ввод.03 _→ вывод. Y4 _→ С2 ввод.23 _→ вывод. Y3 _→ С0)
В ответ на коды команд ОУ вырабатывает пятиразрядный код ситуации: Х1Х2Х3Х4Х5.
Поведение ОУ описывается по рекурсивной схеме с помощью оператора недетерминированного выбора П: Х(O) 03  Y
Y )))): Y2(X(k)& 30)
)))): Y2(X(k)& 30)
где Т4i одноместные функции, аргументом каждой из которых является четвертая компонента кода ситуации;
Т1i одноместные функции, аргументом каждой из которых является первая компонента кода ситуации; четыре функции Т1i и аналогичные Т4iзададим следующим образом: <0,0>, <1,0>}<0,1>, <1,1>} <0,1>, <1,0>}<0,0>, <1,1>}
Проанализировав описания УУ и ОУ, получаем следующие множества кодов ситуации:
G03,23,30,32,37}
G130,32}
G230,37}
G323,37}
G403,23} и соответствующие им функции:
F  2
2 3X4X5 ∨ X1X2
3X4X5 ∨ X1X2 3
3 5 ∨ X1X2X3X4X5
5 ∨ X1X2X3X4X5 X
X X
X X
X 3
3 4 ∨ X1X2
4 ∨ X1X2 3X5 ∨
3X5 ∨  2
2 3X4
3X4 5 ∨ X1
5 ∨ X1 2X3 ∨
2X3 ∨
F1= X1X2 3
3 4
4 5 ∨ X1X2X3X4X5
5 ∨ X1X2X3X4X5
F =
=  1
1 2
2 3X4X5 ∨ X1
3X4X5 ∨ X1 2
2 3X4X5 ∨ X1X2
3X4X5 ∨ X1X2 3X4
3X4 5
5
F2= X1 2
2 3X4X5 ∨ X1X2X3X4X5
3X4X5 ∨ X1X2X3X4X5
F =
=  1
1 2
2 3X4X5 ∨ X1X2
3X4X5 ∨ X1X2 3
3 4
4 5 ∨ X1X2
5 ∨ X1X2 3X4
3X4 5
5
F3=X1X2 3
3 4
4 5 ∨ X1X2
5 ∨ X1X2 3X4
3X4 5
5
F =
=  1
1 2
2 3X4X5 ∨ X1
3X4X5 ∨ X1 2
2 3X4X5 ∨ X1X2X3X4X5
3X4X5 ∨ X1X2X3X4X5
F4=  1
1 2
2 3X4X5 ∨ X1
3X4X5 ∨ X1 2
2 3X4X5
3X4X5
F = X1X2
= X1X2 3
3 4
4 5 ∨ X1X2
5 ∨ X1X2 3X4
3X4 5 ∨ X1X2X3X4X5
5 ∨ X1X2X3X4X5
Тогда функция ошибки будет иметь следующий вид:
Fош= T1( ∨ F
∨ F ) ∨ T2(
) ∨ T2( ∨ F
∨ F ) ∨ T3(
) ∨ T3( ∨ F
∨ F ) ∨ T4(
) ∨ T4( ∨ F
∨ F ) ∨ F′
) ∨ F′
Блок управления и формирования кодов команд 3 реализован в виде микропрограммного автомата (фиг. 6).
На третьем регистре 3.3 хранится код текущего процесса (состояния). Процессу С0 соответствует код 0, процессу С1 код 1, процессу С2 код 2. На вход блока управления и формирования кодов команд 3 поступает код ситуации. В зависимости от кода текущего процесса, хранящегося на третьем регистре 3.3, первое 3.4 и второе 3.5 запоминающие устройства вырабатывают соответственно код команды и код следующего процесса. По заднему фронту тактового импульса, вырабатываемого генератором 3.1, в третий регистр 3.3 записывается код процесса с выхода второго запоминающего устройства 3.5, а на вход блока управления и формирования кодов команд 3 поступает новый код ситуации.
Вырабатываемый блоком управления и формирования кодов команд 3 код команды и вырабатываемый ОУ код ситуации поступает на блок контроля 4, который выполнен в виде ПЗУ, реализующего функцию ошибки и выдающего единичный сигнал в том случае, если ошибки не было, и нулевой сигнал если код ситуации относится к запрещенным. При выдаче нулевого сигнала на выходе блока контроля 4 элемент И 3.2, входящий в состав блока управления и формирования кодов команд 3, блокирует поступление тактовых импульсов от генератора 3.1.
Запись в ПЗУ, представляющее собой блок контроля 4, осуществляется таким образом, что блок контроля 4 выдает единичный сигнал на следующих восьмеричных наборах, поступающих на адресные входы ПЗУ; 1410,1404,1510,1744,1742,1142,1141,0041}
Остальным наборам соответствует нулевой сигнал на выходе блок 4 контроля. Причем код ситуации подается на пять младших разрядов адресных входов, а код команды на пять старших разрядов.
Карты прошивки ПЗУ первого 3.4 и второго 3.5 запоминающих устройств представлены в таблице соответственно. В таблице представлены только те наборы, поведение автомата на которых определено, остальным наборам соответствуют нулевые значения выходов. Код ситуации подается на пять младших разрядов адресных входов запоминающих устройств, а код процесса на два старших разряда. Младшим разрядом является крайняя правая позиция цифрового представления, а старшим разрядом крайняя левая позиция.
Введение в предлагаемое изобретение неизвестных ранее связей позволяют положительный эффект, выраженный в повышении достоверности функционирования устройства и расширении области применения.
Повышение достоверности происходит за счет более полного контроля ситуационной динамики и удаления из устройства ряда элементов, что приводит к упрощению устройства, а следовательно, и к уменьшению вероятности ошибки в устройстве.
Расширение области применения обеспечивается в частности возможностью работы устройства в темпе ОУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ | 1991 |
|
RU2029986C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЦИФРОВЫХ БЛОКОВ | 1991 |
|
RU2065202C1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ЛОГАРИФМА | 1991 |
|
RU2006916C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИМВОЛЬНОЙ ИНФОРМАЦИИ | 1991 |
|
RU2010319C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ АКТИВНОЙ МОЩНОСТИ | 1993 |
|
RU2074397C1 |
| ЦИФРОВОЙ ТЕРМОМЕТР | 1992 |
|
RU2039953C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР | 1992 |
|
RU2036502C1 |
| ДВОИЧНЫЙ УМНОЖИТЕЛЬ | 1992 |
|
RU2006918C1 |
| КОРРЕЛЯЦИОННАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1991 |
|
RU2007753C1 |
| СПОСОБ ЦВЕТОКОРРЕКЦИИ СИГНАЛА ИЗОБРАЖЕНИЯ | 1990 |
|
RU2024214C1 |




Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах управления с дискретным характером технологичского цикла. Устройство позволяет обеспечить высокую достоверность ситуационного контроля, упрощение устройства, возможность контроля правильности взаимодействия объекта управления и устройства, вырабатывающего коды команд, обеспечение реалльного масштаба времени ситуационного контроля и управления и расширение области применения данного устройства. Сущность: в сравнении ожидаемого кода ситуации, сформированного при анализе взаимодействия объекта управления и устройства управления с теми значениями, которые вырабатывают объект управления непосредственно в ходе работы в ответ на коды команд, вырабатываемые устройством управления. Несовпадение ожидаемых и выработанных значений является признаком ошибки. Устройство содержит два регистра, блок управления и формирования кодов команд и блок контроля. 6 ил. 1 табл.
УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ, содержащее первый регистр, подключенный группой выходов к первой группе информационных входов узла контроля, второй регистр, узел управления и формирования кодов команд, включающий генератор тактовых импульсов, элемент И и первый блок памяти, подключенный группой выходов к группе информационных входов второго регистра, группа выходов которого является выходом "код команды" устройства, служащим для подключения соответствующего информационного входа объекта управления, группа информационных входов первого регистра является информационным входом устройства, служащим для подключения выхода "Код ситуации" объекта управления, выход генератора тактовых импульсов связан с первым входом элемента И, отличающееся тем, что в узел управления и формирования кодов команд введены второй блок памяти и третий регистр, а узел контроля выполнен в виде блока памяти кодов ситуаций, первая группа адресных входов которого является первой группой информационных входов узла контроля, выход блока памяти кодов ситуаций подключен к второму входу элемента И, связанного выходом с синхронизирующими входами первого и второго регистров и с синхронизирующим входом третьего регистра, подключенного группой информационных входов к группе выходов второго блока памяти, а группой выходов к первым группам информационных входов первого и второго блоков памяти, соединенных вторыми группами информационных входов с группой выходов первого регистра, группа выходов первого блока памяти подключена к второй группе адресных входов блока памяти кодов ситуаций, второй вход элемента И является сигнальным выходом "Контроль" устройства.
| Устройство для ситуационного контроля и управления | 1986 |
|
SU1368895A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
