Изобретение относится к системам управления, а именно к системам управления полетом беспилотных малоразмерных летательных аппаратов (МЛА).
Известно устройство для стабилизации крена самолета [1] которое содержит установленные на нижней и верхней поверхностях обеих консолей крыла датчики крыла давления. Алгебраическая сумма выходных сигналов этих датчиков формирует сигнал, с помощью которого оценивают приращение Δ αп угла атаки между вектором потока и продольной осью ЛА. Полученный сигнал через усилитель поступает на последовательно соединенные сумматор, рулевую машину, элероны, которые, воздействуют на ЛА, возвращают его в стабилизированное положение.
Данное устройство не требует установки на борту ЛА датчика крена, а его применение основано на том, что существует взаимосвязь угла крена γ и угла скольжения [2] и на том, что при полете со скольжением на консолях появляются дополнительные углы атаки противоположных знаков:
Δ αправ -Δ αлев, [3] где
Δαправ=  (1)
(1)
β угол скольжения;
Ψ угол поперечной V-образности крыла.
Очевидны недостатки рассматриваемого устройства. Во-первых, точность стабилизации мала, так как нет строго измерения угла крена, а выполняется лишь его косвенная оценка. Очевидно, что вследствие инерционных свойств летательного аппарата углы β и γ связаны через постоянную времени и, следовательно, стабилизация осуществляется с запаздыванием.
Во-вторых, устройство неприменимо для случая, когда угол поперечной V-образности крыла Ψ 0, что следует из формулы (1), т.е. данное техническое решение не является универсальным.
Известна система управления боковым движением беспилотного МЛА [4] содержащая два канала управления с жесткой обратной связью, в состав которых входят датчики угловых скоростей крена и рыскания, сумматоры, усилители, приводы элеронов и руля направления, датчики положения элеронов и руля направления. Система содержит вычислитель значений угла крена, в который заводится информация о параметрах полета от двух датчиков давления, блока формирования сигнала угла скольжения и от датчика скорости полета, а на выходе формируется сигнал, пропорциональный текущему значению угла крена γ МЛА, который позволяет обеспечить поперечную устойчивость МЛА.
Недостатком данной системы является то, что ее использование огpаничено небольшим диапазоном высот. Если в ходе полета высота изменяется от 0 до 2000 м, то погрешность вычислений, реализуемых в вычислителе значений угла крена, не превышает 10% Расширение диапазона высот ведет к недопустимо большим погрешностям, при которых использование данной системы нецелесообразно. Кроме того, в данной системе реализован трехступенчатый алгоритм определения балансировочного угла атаки и угла скольжения для основных режимов полета, горизонтального, набора высоты и снижения, что ведет к усложнению системы и к росту погрешностей. В тех случаях, когда МЛА несет на борту целевое оборудование, например фотокамеру, для работы которой предъявляются повышенные требования к стабилизации крена, данная система неприменима из-за невысокой точности.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является демпфер типа АП-106М [5] обеспечивающий демпфирование движений по каналам крена и рыскания. Демпфер состоит из двух каналов, содержащих последовательно соединенные датчик угловой скорости крена, первый сумматор, первый усилитель и привод элеронов, датчик положения элеронов, вход которого связан с выходом привода элеронов, а выход с вторым входом первого сумматора, последовательно соединенных датчика угловой скорости рыскания, второго сумматора, второго усилителя и привода руля направления, датчик положения руля направления, вход которого связан с выходом привода руля направления, а выход с вторым входом второго сумматора, радиоприемное устройство, первый и второй выходы которого соединены с третьим входом первого и второго сумматоров.
Недостаток демпфера состоит в том, что при использовании его для автоматического управления креном ЛА он обеспечивает поперечную устойчивость ЛА только совместно с контуром стабилизации угла крена, что требует установки на борту датчика крена. Традиционно таким датчиком является гировертикаль, которая в случае ее установки на борту ведет к недопустимо большим для МЛА габаритам и весу бортового оборудования. В своей работе авторы имеют дело с МЛА, которые являются динамически подобными моделями вновь создаваемых самолетов. Часто в соответствии с тактико-техническими требованиями получаемая аэродинамическая компоновка этих самолетов такова, что она не обеспечивает собственную поперечную устойчивость ЛА. Из-за существующих жестких ограничений на габариты и вес невозможно систему управления построить таким образом, чтобы в ее составе присутствовали традиционные гироскопические датчики угла крена.
Предлагаемая система управления боковым движением беспилотного МЛА решает задачу повышения устойчивости ЛА по крену.
Для этого в систему управления боковым движением МЛА, состоящую из двухканального демпфера, включающего в себя радиоприемное устройство и каналы рыскания крена, в состав каждого из которых входят последовательно соединенные датчик угловой скорости, соответственно рыскания и крена, сумматор, усилитель, привод руля, датчик положения руля, вход которого связан с выходом привода руля, а выход с вторым входом сумматора, третий вход которого соединен с выходом радиоприемного устройства, введены вычислитель значений угла крена, первый вход которого подключен к выходу датчика угловой скорости крена, акселерометр, датчик скорости полета, датчик высоты полета и задатчик, выходы которых связаны соответственно с вторым, третьим, четвертым и пятым входами вычислителя значений угла крена, пятый и шестой входы которого соединены соответственно с выходами датчика угловой скорости рыскания и датчика положения руля направления. При этом вычислитель значений угла крена выполнен в виде последовательно соединенных дифференцирующего звена, первого блока умножения и первого сумматора, выход которого является выходом вычислителя значений угла крена, последовательно соединенных второго и третьего блоков умножения, блока деления, четвертого блока умножения, второго сумматора, пятого блока умножения и первого апериодического звена, выход которого связан с вторым входом первого сумматора, второго апериодического звена, выход которого соединен с третьим входом первого сумматора, третьего сумматора, выход которого связан с вторым входом третьего блока умножения, а также с первыми входами шестого и седьмого блоков умножения, вторые входы которых подключены соответственно к выходам восьмого и девятого блоков умножения, а выходы шестого и седьмого блоков умножения подсоединены соответственно к второму и третьему входам второго сумматора, причем второй вход четвертого блока умножения соединен с входом второго апериодического звена и является первым входом вычислителя значений угла крена, первый вход восьмого блока умножения соединен с входом дифференцирующего звена и является вторым входом вычислителя значений угла крена, вторые входы первого, восьмого, пятого блоков умножения объединены с первым входом девятого и с обоими входами второго блоков умножения и является третьим входом вычислителя значений угла крена, первый и второй входы третьего сумматора являются соответственно четвертым и пятым входами вычислителя значений угла крена, четвертый вход второго сумматора является шестым входом, а второй вход девятого блока умножения седьмым входом вычислителя значений угла крена. При этом вычислитель значений угла крена реализует следующую функцию:
γ  β
β  +
+ 
 -
- ρvβ+
ρvβ+ +
+  ρvδн+
ρvδн+ ·
·  (2)
(2)
где m масса ЛА;
β угол скольжения;
v скорость полета;
g ускорение силы тяжести;
γ угол крена;
Cz производная коэффициента поперечной силы по углу β;
производная коэффициента поперечной силы по углу β;
ρ массовая плотность воздуха;
S площадь крыла;
αo балансировочный угол атаки;
δн угол отклонения руля направления;
Cz н производная коэффициента поперечной силы по углу δн;
н производная коэффициента поперечной силы по углу δн; угловая скорость рыскания;
угловая скорость рыскания;
P  символ дифференцирования;
символ дифференцирования;
T постоянная времени дифференцирующего и апериодического звеньев.
На фиг. 1 приведена блок-схема системы управления боковым движением беспилотного МЛА; на фиг. 2 блок-схема вычислителя значений угла крена.
В канал крена входят последовательно соединенные датчик 1 угловой скорости крена, первый сумматор 2, усилитель 3, привод 4 элеронов, датчик 5 положения элеронов, выход которого связан с вторым входом первого сумматора 2. Третий вход первого сумматора 2 является входом по сигналу управления и соединен с выходом радиоприемного устройства 6. Аналогично в канале рыскания последовательно соединены датчик 7 угловой скорости рыскания, второй сумматор 8, усилитель 9, привод 10 руля направления и датчик 11 положения руля направления, подсоединенный к второму входу второго сумматора 8, третий вход которого является входом по сигналу управления и соединен с выходом радиоприемного устройства 6. Выход вычислителя 12 значений угла крена подключен к четвертому входу второго сумматора 2, а к первому, шестому и седьмому входам вычислителя 12 подключены выходы датчиков угловой скорости крена 1, рыскания 7 и положения руля направления 11 соответственно. Выходы акселерометра 13, датчиков скорости полета 14 и высоты полета 15 связаны соответственно с вторым, третьим и четвертым входами вычислителя 12 значений угла крена. Выход задатчика 16 подключен к пятому входу вычислителя 12.
Вычислитель 12 значений угла крена содержит (фиг. 2) дифференцирующее звено 17, первый блок 18 умножения, первый сумматор 19, второй 20 и третий 21 блоки умножения, блок 22 деления, четвертый блок 23 умножения, второй сумматор 24, пятый блок 25 умножения, апериодические звенья 26, 27, третий сумматор 28, шестой 29, седьмой 30, восьмой 31 и девятый 32 блоки умножения. При этом последовательно соединены дифференцирующее звено 17, первый блок 18 умножения, первый сумматор 19. Также последовательно соединены второй 20 и третий 21 блоки умножения, блок 22 деления, четвертый блок 23 умножения, второй сумматор 24, пятый блок 25 умножения и первое апериодическое звено 26, выход которого связан с вторым входом первого сумматора 19, третий вход которого соединен с выходом второго апериодического звена 27. Выход третьего сумматора 28 связан с вторым входом третьего блока 21 умножения и с первыми входами шестого 29 и седьмого 30 блоков умножения, вторые входы которых подключены соответственно к выходам восьмого 31 и девятого 32 блоков умножения. Выходы шестого 29 и седьмого 30 блоков умножения связаны соответственно с вторым и третьим входами второго сумматора 24. Второй вход четвертого блока 23 умножения соединен с входом второго апериодического звена 27 и является первым входом вычислителя 12 значений угла крена. Первый вход восьмого блока 31 соединен с входом дифференцирующего звена 17 и является вторым входом вычислителя 12. Вторые входы первого 18, восьмого 31 и пятого 25 блоков умножения объединены с первым входом девятого 32 и с обоими входами второго 20 блоков умножения и является третьим входом вычислителя 12. Первый и второй входы третьего сумматора 28 являются соответственно четвертым и пятым входами вычислителя 12 значений угла крена, четвертый вход второго сумматора 24 является шестым, а второй вход девятого блока 32 умножения седьмым входами вычислителя 12.
Система управления боковым движением беспилотного МЛА работает следующим образом.
В системе реализованы законы управления с жесткой обратной связью. Законы управления имеют вид
в канале руля направления
δн= K + Uн
+ Uн
в канале элеронов
δэ= K + K
+ K
где δн и δэ углы отклонения соответственно руля направления и элеронов; и
и  угловые скорости соответственно рыскания и крена;
угловые скорости соответственно рыскания и крена;
Uн, Uэ сигналы задатчика режимов движения МЛА.
В том случае, если управление МЛА осуществляется по радио, сигналы Uн и Uэ являются выходными сигналами бортового радиоприемного устройства 6. Если полет выполняется по жесткой программе, эти сигналы могут подаваться в каналы управления с выхода программного устройства, которое в этом случае должно входить в состав бортового оборудования.
Чувствительными элементами системы управления боковым движением беспилотного МЛА являются датчики угловой скорости крена 1 и рыскания 7, акселерометр 13, датчик 14 скорости полета, датчик 15 высоты полета. Датчик 1 угловой скорости крена вырабатывает сигнал, пропорциональный  , который поступает на первый вход сумматора 2 и на первый вход вычислителя 12 значений угла крена. На выходе датчика 7 угловой скорости рыскания вырабатывается сигнал, пропорциональный
, который поступает на первый вход сумматора 2 и на первый вход вычислителя 12 значений угла крена. На выходе датчика 7 угловой скорости рыскания вырабатывается сигнал, пропорциональный  . Этот сигнал поступает на первый вход сумматора 8 и на шестой вход вычислителя 12. С выхода акселерометра 13 на второй вход вычислителя 12 подается сигнал, пропорциональный боковой перегрузке nz. На выходе датчика 14 скорости полета формируется сигнал, пропорциональный v, текущей скорости полета МЛА, который поступает на третий вход вычислителя 12 значений угла крена. С выхода датчика 15 высоты полета на четвертый вход вычислителя 12 подается сигнал, пропорциональный Н, текущий высоте полета МЛА.
. Этот сигнал поступает на первый вход сумматора 8 и на шестой вход вычислителя 12. С выхода акселерометра 13 на второй вход вычислителя 12 подается сигнал, пропорциональный боковой перегрузке nz. На выходе датчика 14 скорости полета формируется сигнал, пропорциональный v, текущей скорости полета МЛА, который поступает на третий вход вычислителя 12 значений угла крена. С выхода датчика 15 высоты полета на четвертый вход вычислителя 12 подается сигнал, пропорциональный Н, текущий высоте полета МЛА.
На выходе задатчика 16 формируется сигнал, пропорциональный значению массовой плотности воздуха на уровне моря ρo= 0,125, который подается на пятый вход вычислителя 12 значений угла крена. Вычислитель значений угла крена реализует алгоритм (2) (см. фиг. 2).
На вход дифференцирующего звена 17 подается сигнал, пропорциональный углу скольжения β, а на выходе формируется сигнал  β, который поступает на первый вход блока 18 умножения, на второй вход которого подается сигнал V. Сигнал
β, который поступает на первый вход блока 18 умножения, на второй вход которого подается сигнал V. Сигнал 
 с выхода блока 18 поступает на первый вход сумматора 19.
с выхода блока 18 поступает на первый вход сумматора 19.
Сигнал  пропускается через апериодическое звено 27, на выходе которого формируется сигнал
пропускается через апериодическое звено 27, на выходе которого формируется сигнал 
 , поступающий на третий вход сумматора 19.
, поступающий на третий вход сумматора 19.
На входы сумматора 28 подаются сигналы Н и ρо, а на выходе формируется сигнал, пропорциональный массовой плотности воздуха ρ, который поступает на второй вход блока 21 умножения и на первые входы блоков 29, 30 умножения.
На входы блока 31 умножения подаются сигнал V и сигнал nz, пропорциональный углу скольжения, а на выходе формируется сигнал V ˙ β, поступающий на второй вход блока 29 умножения, с выхода которого на второй вход сумматора 24 поступает сигнал  ρvβ V β.
ρvβ V β.
На входы блока 28 умножения подаются сигналы V и δн, а на выходе формируется сигнал V ˙ δн, который поступает на второй вход блока 30 умножения. На его выходе формируется сигнал  ρvδн, который подается на третий вход сумматора 24.
ρvδн, который подается на третий вход сумматора 24.
На оба входа блока 20 умножения поступает сигнал V, а сигнал V2 с его выхода подается на первый вход блока 21 умножения, на выходе которого формируется сигнал  , который пропускается через блок 22 деления. Сигнал αo с выхода блока 22 подается на первый вход блока 23 умножения, на второй вход которого поступает сигнал
, который пропускается через блок 22 деления. Сигнал αo с выхода блока 22 подается на первый вход блока 23 умножения, на второй вход которого поступает сигнал  . На выходе блока 23 формируется сигнал
. На выходе блока 23 формируется сигнал  , поступающий на первый вход сумматора 24, на четвертый вход которого подается сигнал
, поступающий на первый вход сумматора 24, на четвертый вход которого подается сигнал  .
.
В результате на выходе сумматора 24 формируется сигнал суммы Sρvβ+
Sρvβ+ +
+  ρvδн+
ρvδн+
который подается на первый вход блока 25 умножения, на второй вход которого подается сигнал V. Сигнал с выхода блока 24 пропускается через апериодическое звено 26, на выходе которого формируется сигнал ρvβ+
ρvβ+ +
+  ρvδн+
ρvδн+

который подается на второй вход сумматора 19. На выходе сумматора 19, который также является выходом вычислителя 12 значений угла крена, формируется сигнал, пропорциональный γ, текущему значению угла крена МЛА. Этот сигнал с выхода вычислителя 12 поступает на четвертый вход сумматора 2 (см. фиг. 1).
Таким образом, благодаря введению вычислителя значений угла крена, акселерометра, датчиков скорости и высоты полета, задатчика получена система управления боковым движением беспилотного МЛА, имеющая минимальные габариты и вес за счет того, что угол крена определяется путем вычислений. При этом алгоритм вычисления (2) помимо текущих параметров полета содержит аэродинамические характеристики МЛА, полученные экспериментальным путем, точность определения которых обеспечивается тем, что при аэродинамических продувках вместо модели можно использовать натуру, т.е. сам МЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления боковым движением беспилотного малоразмерного летательного аппарата | 1990 |
|
SU1825746A1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| Автопилот | 1990 |
|
SU1802357A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕГКОГО САМОЛЕТА | 2000 |
|
RU2176812C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335009C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
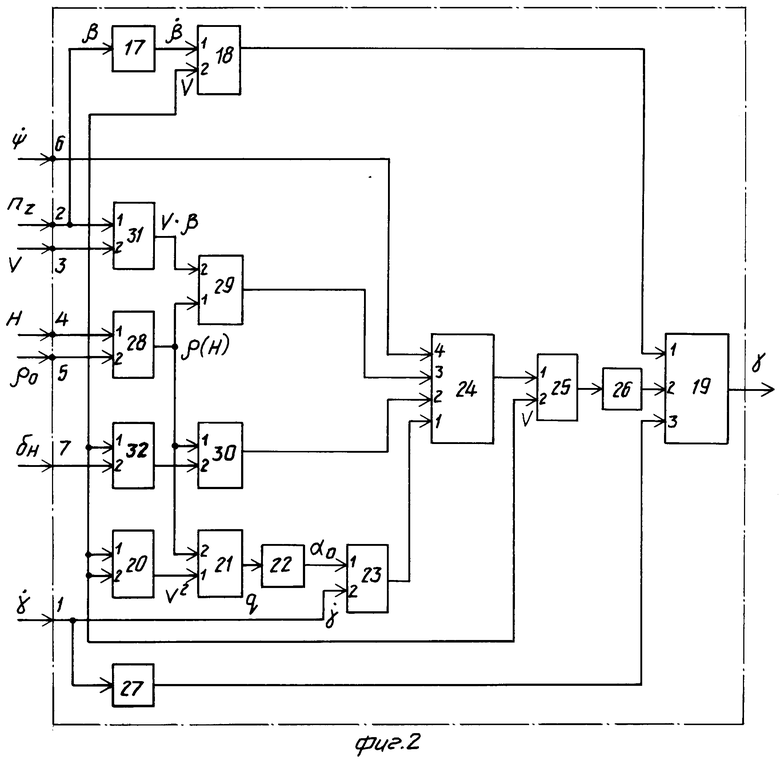
Изобретение относится к области автоматического регулирования, а именно к системам управления полетом беспилотного малоразмерного летательного аппарата (МЛА), и позволяет повысить устойчивость ЛА по крену. Система управления содержит два канала управления с жесткой обратной связью, в состав которых входят датчики угловых скоростей крена 1 и рыскания 7, сумматоры 2, 8, усилители 3, 9, привод 4 элеронов, привод 10 руля направления, датчики положения элеронов 5 и руля направления 11. Благодаря введению вычислителя 12 значений угла крена, акселерометра 13, датчика 14 скорости полета, датчика 15 высоты полета и задатчика 16 получена система управления боковым движением беспилотного МЛА, имеющая малые габариты и вес за счет того, что текущее значение угла крена определяется путем вычислений, и позволяющая обеспечить поперечную устойчивость МЛА. 1 з.п. ф-лы, 2 ил.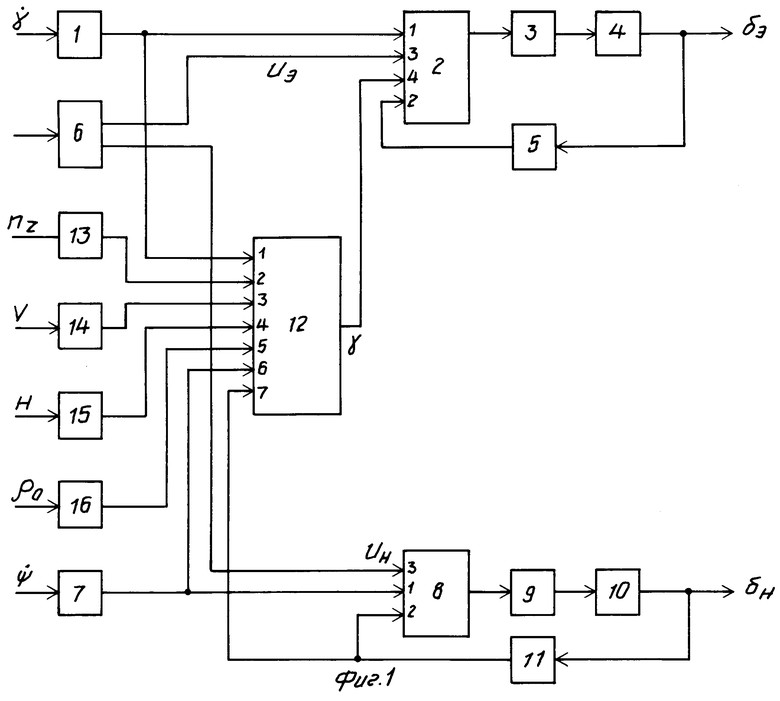
с вторым входом первого сумматора, последовательно соединенные датчик угловой скорости рыскания, второй сумматор, второй усилитель и привод руля направления, датчик положения руля направления, вход которого связан с выходом привода руля направления, а выход с вторым входом второго сумматора, радиоприемное устройство, первый и второй выходы которого связаны с третьими входами соответственно первого и второго сумматоров, отличающаяся тем, что в нее введены вычислитель значений угла крена, первый вход которого подключен к выходу датчика угловой скорости крена, акселерометр, датчик скорости полета, датчик высоты полета и задатчик, выходы которых связаны соответственно с вторым, третьим, четвертым и пятым входами вычислителя значений угла крена, пятый и шестой входы которого соединены соответственно с выходами датчика угловой скорости рыскания и датчика положения руля направления.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Боднер В.А | |||
| Системы управления ЛА | |||
| М., 1973, с.181-182, рис.5.15. | |||
