Изобретение относится к области автоматического регулирования и может быть использована для управления полетом бес- пи|ютного малоразмерного летательного аппарата (МЛА).
Целью изобретения является повыше- ниф запаса устойчивости автопилота.
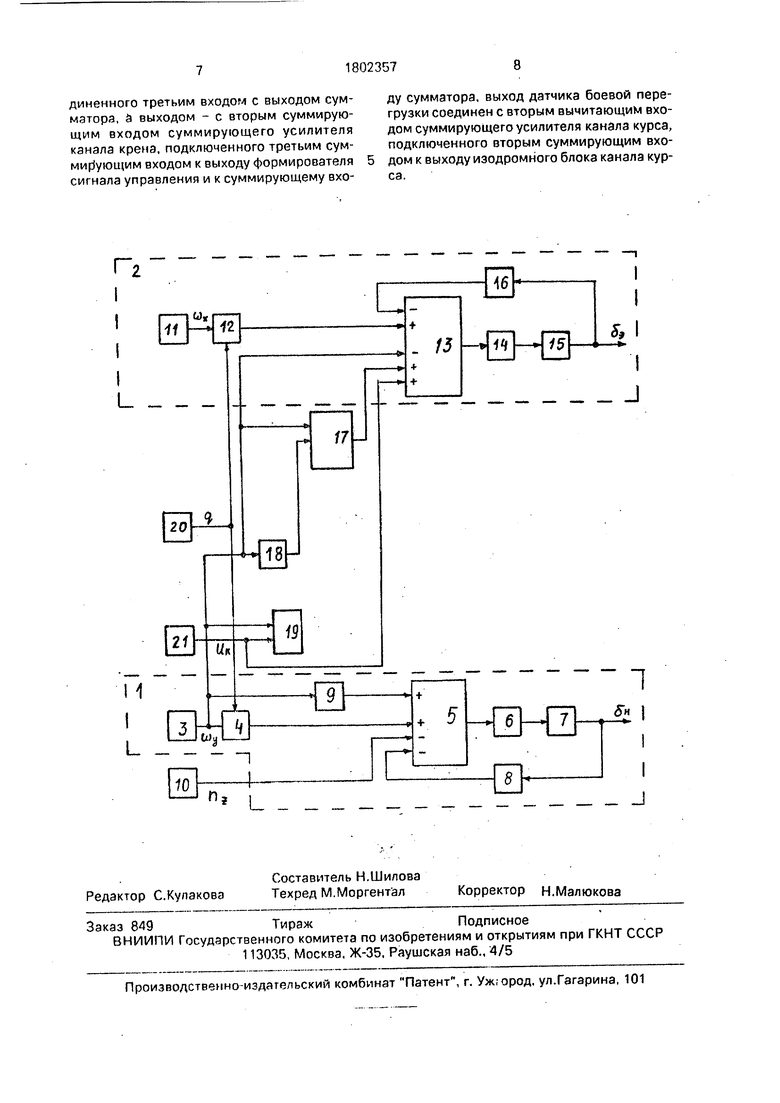
Функциональная блок-схема автопилота представлена на чертеже, где приняты следующие обозначения: канал курса 1, ка- на/ крена 2, датчик угловой скорости канала курса 3, блок переменных коэффициентов каь ала 4, суммирующий усилитель канала курса 5, формирователь закона управления канала курса 6, исполнительный механизм кан ала курса 7, блок обратной связи канала курса 8, изодромный блок 9, датчик боковой
перегрузки 10, датчик угловой скорости канала крена 11, блок переменных коэффициентов канала крена 12, суммирующий усилитель канала крена 13, формирователь закона управления канала крена 14, исполнительный механизм канала крена 15, блок обратной связи канала крена 16, блок умножения 17, блок определения знака 18, сумматор 19, датчик скоростного напора 20. формирователь сигнала управления 21.
щ - угловая скорость вращения относительно нормальной оси ЛА;
й - угловая скорость вращения относительно продольной оси ЛА;
q - скоростной напор;
nz - боковая перегрузка;
UK - сигнал управления;
00 О
ю со ел VJ
5н-угол отклонения руля направления;
дэ- угол отклонения элеронов.
Автопилот работает следующим образом.
В канале курса 1 на выходе датчика угловой скорости 3 формируется сигнал, пропорциональный угловой скорости щ вращения относительно нормальной оси ЛА. Этот сигнал поступает на входе блока 4 переменных коэффициентов канала курса, на управляющий вход которого подается сигнал с выхода датчика скоростного напора 20, пропорциональный величине скоростного напора q. Коэффициент Kffl(q) передачи сигнала блока 4 линейно зависит от величины скоростного напора q, причем уменьшается с ростом скоростного напора.
Выходной сигнал K$y(q) блока переменных коэффициентов 4 поступает на первый суммирующий вход суммирующего усилителя 5 канала курса. Одновременно сигнал с выхода датчика угловой скорости канала курса 3 поступает на вход изодромного блока 9. на выходе которого формируется сигТР
нал, пропорциональный
Тп + 1
%,
который подается на второй суммирующий вход суммирующего усилителя 5 канала курса. На выходе датчика боковой перегрузки 10 вырабатывается сигнал, пропорциональный боковой перегрузке nz и поступает на второй вычитающий вход суммирующего усилителя 5 канала курса, выходной сигнал которого поступает через формирователь закона управления б на исполнительный механизм 7 канала курса, который отклоняет руль направления на угол 5Н. При этом сигнал пропорциональный углу дн. отклонения руля направления через блок обратной связи канала курса 8 подается на первый вычитающий вход суммирующего усилителя 3 и уравновешивает суммарный сигнал датчиков. В результате руль направления отклоняется на величину:
(5Н (q) Щ + КЙу Щ -nz,
.где K$y(q) , КЙу, Knz - коэффициенты передачи сигналов в канале курса 1;
Т - постоянная времени изодромного блока 9;
г, d
dt
оператор дифференцирования.
В результате создается аэродинамический момент относительно нормальной оси ЛА.
Одновременно в канале крена 2 на выходе датчика угловой скорости 11 формиру
10
ется сигнал, пропорциональный угловой скорости вращения относительно продольной оси ЛА. Этот сигнал поступает на вход блока 12 переменных коэффициентов
5 канала крена, на управляющий вход которого подается сигнал с выхода датчика скоростного напора 20. пропорциональный величине скоростного напора q. Коэффициент K$x(q) передачи сигнала блока 12 линейно зависит от величины скоростного напора. Сигнал (q) uJx с выхода блока переменных коэффициентов 12 поступает на первый суммирующий вход суммирую15 щего усилителя 13 канала крена. На второй вычитающий вход суммирующего усилителя 13 подается сигнал с выхода датчика 3 угловой скорости канала курса, который также поступает на вход блока определения знака
20 18, с выхода которого снимается сигнал постоянного уровня, знак которого зависит от Sign %. Кроме того, сигнал с выхода датчика 3 подается на суммирующий вход сумматора 19, на вычитающий вход которого посту25 пает сигнал управления UK с выхода формирователя сигнала управления 21. На выходе сумматора 19 формируется сигнал
(UK - КЙхСОу). Сигналы с выходов датчика 3 угловой скорости канала курса, блока опреде30 ления знака 18 и сумматора 19 поступают соответственно на первый, второй и третий входы блока умножения 17, который формирует сигнал вида Sign о)у (Uk - ),
35 который подается на второй суммирующий вход суммирующего усилителя 13 канала крена. На третий суммирующий вход последнего поступает сигнал управления UK с выхода формирователя сигнала управления
40 21. Сигнал с выхода суммирующего усилите- , ля 13 подаётся через формирователь закона .управления 14 на исполнительный меха- низм 15 канала крена, который отклоняет i элероны на угол 5Э. При этом отклонение
45 элеронов осуществляется в соответствии с законом:
дэ K&x(q)0x - К$у% + Кс$ -(sign У)Х X(U - K$)yfty)-tOy + Uk
гдеК§ ф), K§ yKft$- коэффициенты передачи сигналов в канале крена. В результате отклонения элеронов создается момент относительно продольной оси Л А. 55 Поясним действие некоторых сигналов каналов курса 1 и крена.2, что важно для понимания сущности данного изобретения. Если ЛА приобретает случайный крен у. возникает проекция подъемной аэродинамической силы Y на горизонтальную пло50
скость, равная Y . Sin у, что вызывает появление скольжения ЛА в сторону опущенного крыла. При этом возникает момент статичеР„ Р
схой устойчивости пути My р(Му - производная момента рыскания по углу скольжения /3), под действием которого Происходит разворот ЛА по курсу в сторону совмещения его продольной оси с вектором в оздушной скорости. В результате появится угловая скорость вращения ЛА относи- тЬльно нормальной оси, которая будет су- ествовать, пока существует крен.
лагодаря этой взаимосвязи угла крена и
гловой скорости uty ведение сигнала пропорционального ftiy в закон отклонения эле- р|онов способствует выравниванию ЛА при случайных кренах и обеспечивает попереч- Йую устойчивость МЛА.
Рассмотрим действие нелинейного сиг- (Sign %)(UK - К ay3 щ) сц.
Сигнал управления UK 0 вызывает от- к|лонение элеронов 5Э 0, что, как известно, соответствует отклонению элерона первого крыла вниз, а левого - вверх. В результате
сЪздается момент крена MX 5Э (Мх производная момента крена по углу (5Э), и ЛА начинает поворачиваться относи- т ельно продольной оси, опуская левое и поднимая правое. Возникающий При этом крен у самолета создает боковую силу Y sin у, что вызывает скольжение в сторону опущенного крыла. При этом появ- л яется момент статической устойчивости
; р
г(ути My / , и ЛА начинает разворот по курсу с угловой скоростью Уу 0. Причем,
п|ри -q- будет достигнут режим
.} КЙу
установившегося разворота. Действи.тель- HJO, если а)у , то нелинейный сигнал
(Јign й)(ик - K&yft) 6Uy, играя роль положительной обратной связи, будет способ- с|твовать увеличению крена, и следовательно, увеличению угловой скорости toy. Если ау , то знакнелиней- нЬго сигнала совпадает со знаком сигнала -К Шуэ щ. В этом случае нелинейный сиг- н ал (Sign Уу)(11к - К %э ) щ действует как сигнал отрицательной обратной связи, спо- сэбствует уменьшению крена, а следовательно - и уменьшению угловой скорости . (ри снятии команды (UK 0) нелинейный с 1гнал. играя роль отрицательной обратной сзязи, способствует быстрому возвраще- ЛА в г оризонтальное положение за счет дополнительного отклонения электронов, пропорционального сигналу щ.
:
10
15
20
25
зо
35
40
45
50
55
Поскольку сигнал боковой перегрузки пг эквивалентен сигналу по углу скольжения -/, его введение с соответствующим знаком в закон отклонения руля направления способствует искусственному увеличению флюгерных свойств МЛА и повышает быстродействие по курсу замкнутой системы ЛА- автопилот. С другой стороны, флюгерные свойства ЛА ухудшают его реакцию на ветровые возмущения. Для уменьшения влияния ветрового возмущения на МЛА в закон управления рулем направления введен сигнал А. 1 °V который при порывах ветра i р -г 1
эффективно противодействует возмущающему моменту. При разворотах ЛА с постоянной угловой скоростью щ влияние этого сигнала отсутствует и он не препятствует выполнению маневра.
Из вышеизложенного следует, что данный автопилот, имея малые габариты и вес, благодаря нетрадиционному решению, когда в составе бортового оборудования нет позиционных датчиков, обеспечивает поперечную устойчивость ЛА при высоком быстродействии по крену и малом отклонении ЛА по углу рыскания при случайных кренах.
Поскольку работа автопилота не требует вмешательства летчика, он может найти применение как на пилотируемых, так и на беспилотных ЛА.
Формула изобретения
Автопилот, содержащий формирователь сигнала управления, датчик скоростного напора и каналы курса и крена, каждый Из которых состоит из последовательно соединенных датчика угловой скорости, блока переменных коэффициентов, суммирующего усилителя, формирователя закона управления и исполнительного механизма, выходом подключенного через блок обратной, связи к первому вычитающему входу суммирующего усилителя, кроме того, канал курса содержит изодромный блок, а выход датчика скоростного напора соединен с управляющими входами блоков переменных коэффициентов обоих каналов, отличаю- щийеятем, что,с целью повышения запаса устойчивости автопилота, в кем дополнительно установлены датчик боковой перегрузки, сумматор, блок умножения и блок определения знака, причем выход датчика угловой скорости канала курса соединен с входом изодромного блока канала курса, с вторым входом блока умножения, с вычитающим входом сумматора и с вхгдом блока определения знака, подключенного выходом к второму входу блоке умножения, соединенного третьим входом с выходом сумматора, а выходом - с вторым суммирующим входом суммирующего усилителя канала крена, подключенного третьим сумду сумматора, выход датчика боевой перегрузки соединен с вторым вычитающим входом суммирующего усилителя канала курса, подключенного вторым суммирующим вхомир ующим входом к выходу формирователя 5 дом к выходу изодромного блока канала кур- сигнала управления и к суммирующему вхо- са.
ду сумматора, выход датчика боевой перегрузки соединен с вторым вычитающим входом суммирующего усилителя канала курса, подключенного вторым суммирующим вхо
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| АВТОПИЛОТ ДЛЯ СИММЕТРИЧНОЙ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2302358C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| МОДЕРНИЗИРОВАННОЕ АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2554515C1 |
| Патент США N 11198017 | |||
| кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Электрическая пишущая машина | 1926 |
|
SU5860A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Боднер В.А | |||
| Системы управления лета- тел|ьными аппаратами, М.: Машинострое- ниф | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| Водяные лыжи | 1919 |
|
SU181A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Целью изобретения является повышение запаса устойчивости автопилота | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| 00 | |||
