00
ю
СП
VI о
Изобретение относится к система управления, а именно к системам управления полетом беспилотных малоразмерных летательных аппаратов.
Целью изобретения является повышение устойчивости летательного аппарата по ,крену,
На фиг.1 приведена блок-схема системы управления боковым движением беспилотного МЛА; на фиг.2 - блок-схема вычислительного угла крена.
Система управления боковым движением МЛА содержит: датчик 1 угловой скорости рыскания, сумматор 2. усилитель 3, привод 4 руля направления, датчик 5 положения руля направления, датчик 6 угловой скорости крена, сумматор 7, усилитель 8, привод 9 элеронов, вычислитель 11 значений угла крена, датчики 12 и 13 давления, блок 14 вычитания, формирователь 15 значений сигнала скольжения, радиоприемник 16, датчик 17 скорости полета.
Вычислитель значений угла крена 11 содержит первый 18 и второй 19 сумматоры, первый 20, второй 21 и третий 22 блоки умножения, первое 23 и второе 24 апериодические звенья, блок 25 переменного коэффициента, дифференцирующее звено 26.
Система управления боковым движением беспилотного малоразмерного летатель- ного аппарата работает следующим образом.
В системе реализованы законы управления с жесткой обратной связью. Законы управления имеют вид
в канале руля направления
5Н KiHV+UH:0)
в канале элеронов
5Э К1эуК2эу+ иэ.(2)
Здесь дн, 5Э - углы отклонения соответственно руля направления и элеронов;
VA У угловые скорости соответственно рыскания и крена;
DH, иэ - сигналы задатчика режимов движения МЛА.
В том случае, если управление МЛА осуществляется по радио, сигнглы UH, U3 являются выходными сигналами бортового радиоприемника 16. Если же полет выполняется по жесткой программе, эти сигналы могут подаЕзаться в каналы управления с выхода программного устройства, которое в этом случае должно входить в состав бортового оборудования,
Чувствительными элементами системы управления боковым движением МЛА являются датчики угловой скорости рыскания 1 и крена 6, датчики 12 и 13 давления, датчики 17 скорости полета.
0
5
0
5
0
5
0
5
0
На выходе радиоприемника 16 формируется сигнал И, определяющий режим полета МЛА, поступающий на управляющие входы формирователя значений сигнала угла скольжения 15.
Датчик угловой скорости рыскания 1 вырабатывает сигнал, пропорциональный угловой скорости рыскания , который поступает на первый вход сумматора 2 и на второй вход вычислителя значений угла крена 11.
На выходе датчика угловой скорости крена 6 вырабатывается сигнал, пропорциональный угловой скорости крена у. Этот сигнал поступает на первый вход сумматора 7 и на первый вход вычислителя 11 значений угла крена.
С выхода датчика 17 скорости полета на шестой вход вычислителя 11 значений угла крена подается сигнал, пропорциональный текущей скорости полета МЛА.
Датчики 12 и 13 давления установлены на поверхности крыла в месте стыка консолей и фюзеляжа симметрично относительно продольной оси ЛА. На выходах датчиков 12 и 13 формируются сигналы, пропорциональные изменению давления Дрпр ±Др +Дрв
Арлев + Ар 4- Дрв,
где Арпр, Дрлев - изменения давления на правой и левой консолях крыла соответственно;
± А р - изменение давления с определенным знаком, обусловленное скольжением МЛА;
Арв - изменение давления, вызванное атмосферными возмущениями
Эти сигналы поступают на входы блока 14 вычитания, на выходе которого получается сигнал разности. Например, если
А рпр А р + А рв;
Арлев Ар + Арв,
получаем на выходе блока 14
2 А р А рпр - А Рлев.
Сигнал 2 Ар поступает на информационный вход формирователя 15 значений сигнала угла скольжения, на управляющий вход которого подается сигнал с выхода радиоприемника 16, В формирователе 15 с помощью таблиц значений реализованы функции
/ F,(Ap)
для основных режимов полета. Сами функции могут быть получены экспериментально. В простейшем случае достаточно рассмотреть три режима (I 1-3): режим набора высоты; режим горизонтального полета; режим снижения.
Выбор соответствующей зависимости РцЛ р) для конкретного режима выполняется посигналу U радиоприемника 16. Сигнал, пропорциональный скольжению /3 , поступает с выхода формирователя 15 значений сигнала угла скольжения на четвертый вход вычислителя 11 значений угла крена.
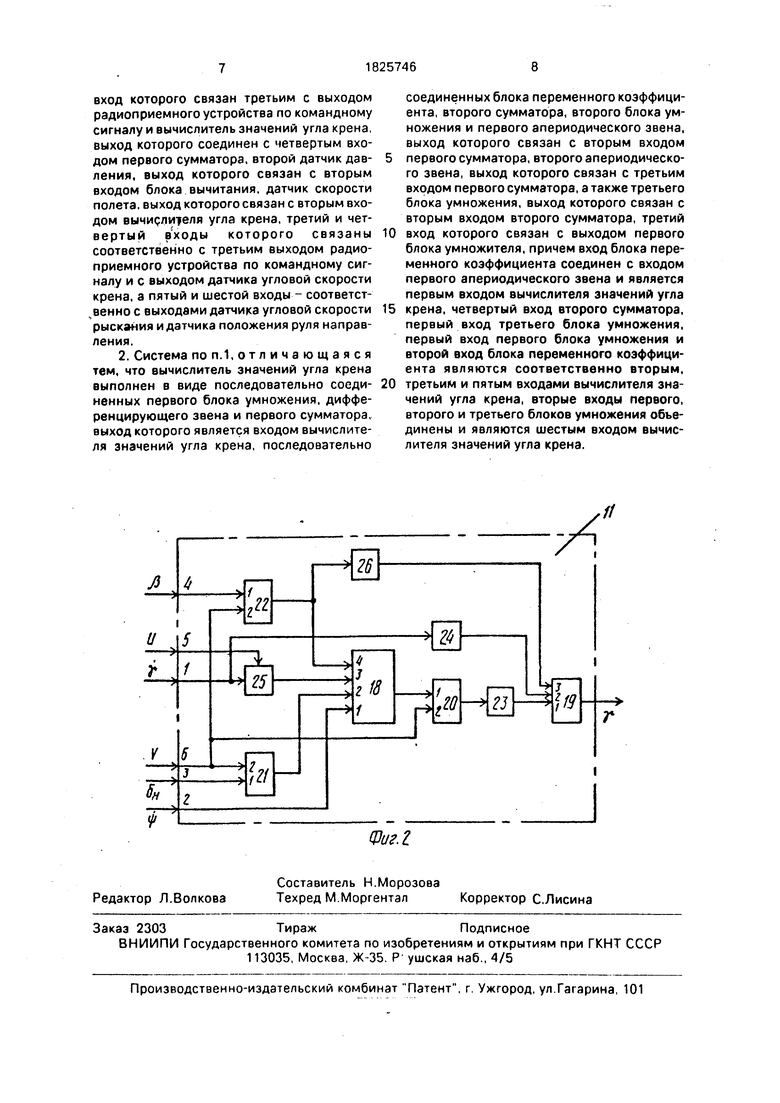
Вычислитель значений угла крена реализует алгоритм (см.фиг.2).
На входы блока 22 умножения подаются сигналы /3 и V, Сигнал с выхода блока 22 поступает на вход дифференцирующего звена 26, на выходе которого формируется
сигнал (т j P р , поступающий на третий
вход сумматора 19. Сигнал у поступает на вход апериодического звена 24. На выходе
этого звена формируется сигнал .
который поступает на второй вход сумматора 19.
Сигнал, пропорциональный произведению V ft формируется на выходе блока 22 умножения и поступает на четвертый вход сумматора 18.
По сигналу U радиоприемника 16, поступающему на управляющий блок 25 переменных коэффициентов, на информационный вход которого подается сигнал у, на выходе блока 25 формируется сигнал Оо у, где «о - значение угла атаки для определенного режима полета. Этот сигнал подается на третий вход сумматора 18. На входы блока 21 умножения поступает сигналы (5Н и V, а на выходе формируется сигнал, пропорциональный произведению V (5Н, который поступает на второй вход блока 18. На первый вход сумматора 18 поступает сигнал р, В результате на выходе сумматора 18 формируется сигнал суммы
СC2ffpsv
/З+ООУ +
5Н + у, ко2т г 2т торый поступает на первый вход блока 20 умножения, на второй вход которого подается сигнал V. Сигнал с выхода блока 20 пропускается через апериодическое звено 23, на выходе которого формируется сигнал, который подается на первый вход сумматора 19. На выходе этого сумматора, который также является выходом всего вычислителя 11 значений угла крена, формируется сигнал, пропорциональный текущему значению угла крена уМЛА.
Этот сигнал с выхода вычислителя 11 значений угла крена поступает на четвертый вход сумматора 7.
Отклонение руля направления в канала рыскания проходит в соответствии с законом (1), а отклонение элеронов в канале крена - в соответствии с законом (2).
Блок 25 переменных коэффициентов можно реализовать в виде блока, содержащего параллельно подключенные цепи, в каждую из которых входит ключ и переменный резистор. Управляющий сигнал U, определяющий конкретный режим полета, замыкает соответствующий ключ, и сигнал,
пропорциональный у. поступает на третий вход сумматора 18с соответствующим коэффициентом передачи, настройки которого зависит от значения балансировочного угла атаки OQ для конкретного режима полета.
Формирователь 15 значений cm нала угла скольжения может быть реализован по одной из известных схем с помощью таблиц значений, полученных экспериментально,
на базе диодных нелинейных преобразователей.
Блоки умножения и суммирования выпускаются серийно в виде интегральных микросхем.
Таким образом, благодаря введению
вычислителя значений у,ла крена, радиоприемника, двух датчиков давления, датчика скорости полета, блока вычитания и формирователя сигнала угла скольжения
получена система управления боковым движением беспилотного малоразмерного летательного аппарата, в котором повышается устойчивость по крену.
Формула изобрэтения
1. Система управления боковым движением беспилотного малоразмерного летательного аппарата, содержащая последовательно соединенные датчик угловой скорости крена, первый сумматор, первый
усилитель и привод элеронов, датчик положения элеронов, вход которого связан с выходом привода элеронов, а выход -с вторым входом первого сумматора, последовательно соединенные датчик угловой скорости
рыскания, второй сумматор, второй усилитель и привод руля направлений, датчик положения руля напряжений, вход которого связан с выходом привода руля направления, а выход с вторым входом второго сумматора, радиоприемное устройство, первый и вторлй выходы которого соответственно по сигналам скорости разворота и угла крена связаны с третьими входами первого и второго сумматоров, отличающаяся
тем, что, с целью повышения устойчивости летательного аппарата по крену, в нее введены последовательно соединенные первый датчик давления, блок вычитания, блок формирования сигнала угла скольжения, второй
вход которого связан третьим с выходом радиоприемного устройства по командному сигналу и вычислитель значений угла крена, выход которого соединен с четвертым входом первого сумматора, второй датчик давления, выход которого связан с вторым входом блока вычитания, датчик скорости полета, выход которого связан с вторым входом вычирли|вля угла крена, третий и четвертый входы которого связаны соответственно с третьим выходом радиоприемного устройства по командному сигналу и с выходом датчика угловой скорости крена, а пятый и шестой входы - соответст- ,венно с выходами датчика угловой скорости рыскания и датчика положения руля направления.
2. Система по п. 1,отличающаяся тем, что вычислитель значений угла крена выполнен в виде последовательно соединенных первого блока умножения, дифференцирующего звена и первого сумматора, выход которого является входом вычислителя значений угла крена, последовательно
соединенных блока переменного коэффициента, второго сумматора, второго блока умножения и первого апериодического звена, выход которого связан с вторым входом
первого сумматора, второго апериодического звена, выход которого связан с третьим входом первого сумматора, а также третьего блока умножения, выход которого связан с вторым входом второго сумматора, третий
вход которого связан с выходом первого блока умножителя, причем вход блока переменного коэффициента соединен с входом первого апериодического звена и является первым входом вычислителя значений угла
крена, четвертый вход второго сумматора, первый вход третьего блока умножения, первый вход первого блока умножения и второй вход блока переменного коэффициента являются соответственно вторым,
третьим и пятым входами вычислителя значений угла крена, вторые входы первого, второго и третьего блоков умножения объединены и являются шестым входом вычислителя значений угла крена.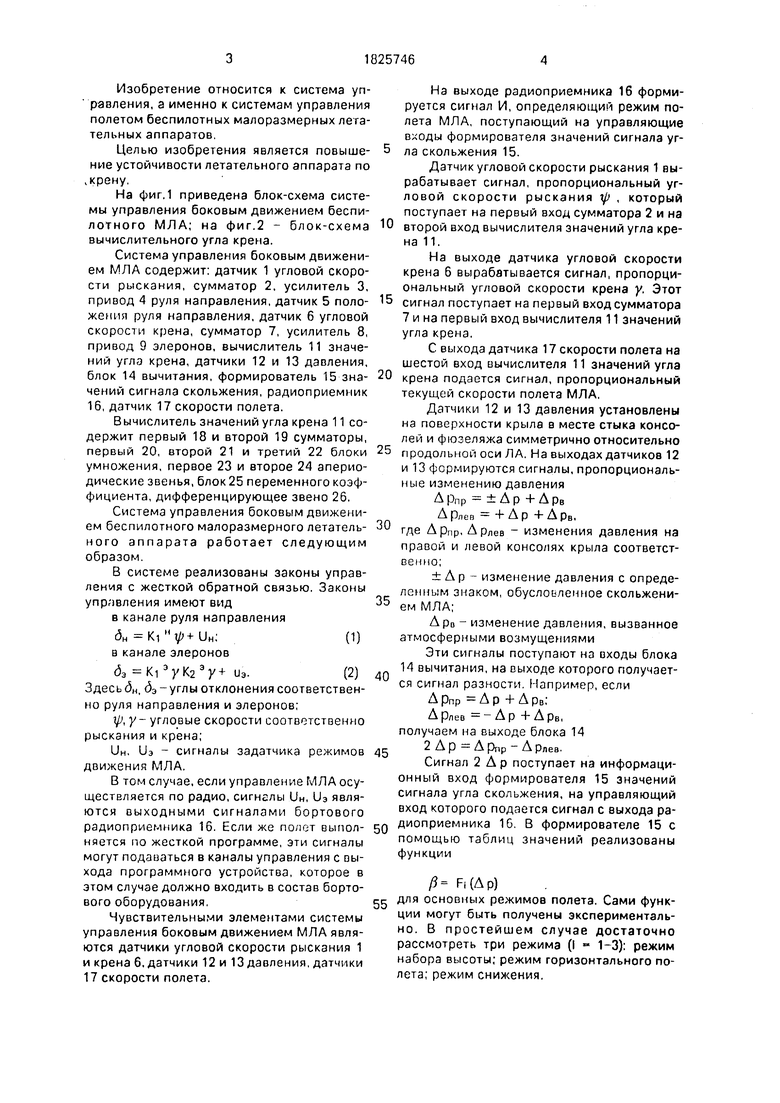
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕГКОГО САМОЛЕТА | 2000 |
|
RU2176812C1 |
| Автопилот | 1990 |
|
SU1802357A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383467C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2383466C1 |
Изобретение относится к автоматическому регулированию, а именно к системам управления полетом беспилотного малоразмерного летательного аппарата. Целью изобретения является повышение устойчивости малоразмерного летательного аппарата по крену. Сущность предложения заключается в том, что в систему введены последовательно соединенные первый датчик 12 давления, блок 14 вычитания, блок 15 формирователя сигнала угла скольжения, второй датчик 13 давления, вход которого связан с вторым входом блока 14 вычитания, а также датчик 17 скорости полета, выход которого связан с вторым входом вычислителя 11 значений угла крена, третий, четвертый, пятый и шестой входы которого связаны соответственно с выходами радиоприемника 16, датчика 6 угловой скорости крена, датчика 1 угловой скорости ры- скания и датчика 5 положения руля направлений, а также в том, что вычислитель значений угла крена выполнен в виде , последовательно соединенных первого блока умножения, дифференцирующего эвена и первого сумматора, а также последовательно соединенных блока переменных коэффициентов, второго сумматора, второго блока умножения и первого апериодического звена, выход которого связан с вторым входом первого сумматора, второго апериодического звена, и третьего блока умножения. 1 з.п.ф-лы, 2 ил. ч Ё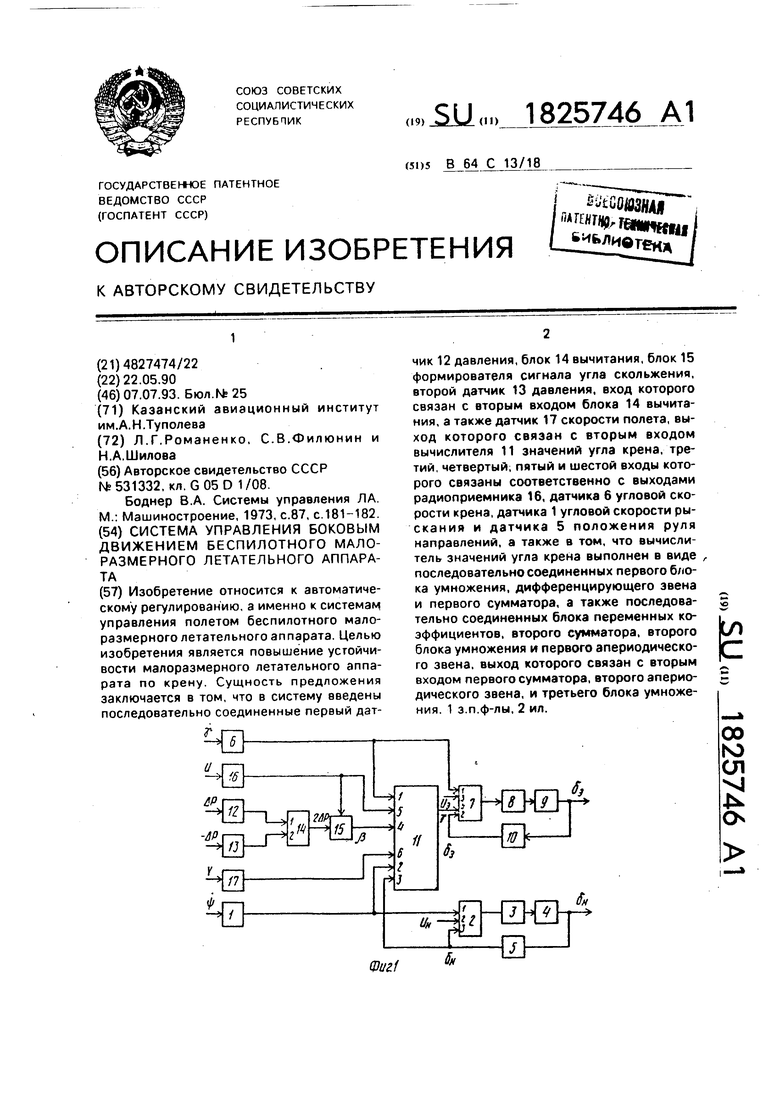
| Устройство для стабилизации крена самолета | 1973 |
|
SU531332A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Боднер В.А | |||
| Системы управления ЛА | |||
| М.: Машиностроение, 1973, с.87, с.181-182 | |||
