Изобретение относится к системам автоматического регулирования полета и предназначено для стабилизации бокового движения легкого самолета.
Известно устройство, предназначенное для автоматической стабилизации самолета по углам тангажа, крена и рыскания; автоматической стабилизации высоты полета; выполнения разворотов, управления углом наклона траектории - автопилот АП-6Е (Бортовые системы управления полетом. / Под ред. Ю.В. Байбородина. М. : Транспорт, 1975)-[1, стр. 234]. Оно содержит центральную гировертикаль ЦГВ-4, блок демпфирующих гироскопов БДГ-10, гирополукомпас ГПК-52АП, корректор высоты КВ-11, сервоусилитель, рулевая машина.
Недостатком данного автопилота при применении на легких и сверхлегких самолетах являются большие массогабаритные показатели применяемой гировертикали. Применение системы автоматического управления полетом на легких и сверхлегких самолетах носит непостоянный характер, вследствие чего применение систем управления, построенных на базе гировертикалей, в некоторых случаях неоправданно по массогабаритным показателям и стоимостным характеристикам.
Известно устройство для управления боковым движением малоразмерного летательного аппарата (Авторское свидетельство Российской Федерации N 2042170, 6 G 05 D 1/08, опубл. БИ N 23 от 20.08.95) -[2], которое содержит последовательно соединенные датчик угловой скорости крена, первый сумматор, первый усилитель и привод элеронов, датчик положения элеронов, вход которого связан с выходом привода элеронов, а выход - с вторым входом первого сумматора, последовательно соединенные датчик угловой скорости рыскания, второй сумматор, второй усилитель и привод руля направления, датчик положения руля направления, вход которого связан с выходом привода руля направления, а выход - с вторым входом второго сумматора, радиоприемное устройство, первый и второй выходы которого связаны с третьими входами соответственно первого и второго сумматоров, акселерометр, датчик скорости полета, датчик высоты полета и задатчик, выходы которых связаны соответственно с вторым, третьим, четвертым и пятым входами вычислителя значений угла крена, первый вход которого соединен с выходом датчика угловой скорости крена, шестой и седьмой входы которого соединены соответственно с выходами датчика угловой скорости рыскания и датчика положения руля направления.
Недостатком данного устройства управления боковым движением малоразмерного летательного аппарата являются ограниченные возможности управления боковым движением самолета вследствие неточного определения угла крена в широком диапазоне угловых скоростей крена и рыскания, так как невозможно совместить высокую чувствительность с широким диапазоном изменений угловых скоростей при использовании одного гироскопического датчика угловой скорости. Известно, что минимально измеряемая гироскопическим датчиком угловая скорость составляет примерно 1% от максимальной измеряемой угловой скорости. Формула соотношения максимальной и минимальной угловой скорости для поплавковых гироскопов
где Δ - погрешность измерения (≈ 0,03) (Г.О. Фриндлер, М.С. Козлов. Авиационные гироскопические приборы, Оборонгиз, 1961)-[3, стр. 255-264].
Для расширения возможностей управления боковым движением легкого самолета необходимо более точное вычисление угла крена в широким диапазоне изменений угловых скоростей. Для решения этой задачи можно использовать датчики угловых скоростей оптико-волоконного типа. Эти датчики имеют низкий порог чувствительности и большой диапазон измерения скоростей. Однако они являются очень дорогими для применения на легких и сверхлегких самолетах. При этом они обладают большими массогабаритными показателями и требуют высоковольтного питания. Поэтому предлагается использовать малогабаритные гироскопические датчики, объединенные при помощи согласующей структуры. Они позволят обеспечить низкий порог чувствительности и достаточно большой диапазон измерения угловых скоростей. Один из двух гироскопических датчиков обладает низким порогом чувствительности, а другой обеспечивает большой диапазон измерения скоростей. Объединение двух гироскопических датчиков угловых скоростей в сравнении с оптико-волоконным датчиком угловой скорости будет выгодно отличаться по массе, габаритам и стоимости.
Получение сигнала, пропорционального отклонению от заданного курса в системах управления боковым движением не представляет проблемы при использовании негироскопических датчиков (Авторское свидетельство Российской Федерации N 2077824, 6 G 08 G 5/00, опубл. БИ N 11 от 20.04.97) - [4].
Ставится задача расширения возможности управления боковым движением легкого самолета в широком диапазоне изменений угловых скоростей крена и рыскания путем уменьшения погрешности определения угла крена.
Поставленная задача достигается тем, что в устройство, содержащее первый датчик угловой скорости крена, последовательно соединенные первый сумматор, первый усилитель и привод элеронов, датчик положения элеронов, вход которого связан с выходом привода элеронов, а выход - с вторым входом первого сумматора, первый датчик угловой скорости рыскания, последовательно соединенные второй сумматор, второй усилитель и привод руля направления, датчик положения руля направления, вход которого связан с выходом привода руля направления, а выход - с вторым входом второго сумматора, программное устройство, первый и второй выходы которого связаны с третьими входами соответственно первого и второго сумматоров, вычислитель значений угла крена, акселерометр, датчик скорости полета, датчик высоты полета и задатчик, выходы которых связаны соответственно с вторым, третьим, четвертым и пятым входами вычислителя значений угла крена, седьмой вход которого соединен с выходом датчика положения руля направления, дополнительно введен второй датчик угловой скорости крена, подключенный к третьему входу третьего сумматора через последовательно соединенные первый масштабирующий усилитель, первый инвертор, первый нелинейный блок, второй вход третьего сумматора соединен с выходом первого масштабирующего усилителя, первый вход соединен через второй масштабирующий усилитель с выходом первого датчика угловой скорости крена, а выход соединен с первым входом блока вычислений значений угла крена и первым входом первого сумматора, второй датчик угловой скорости рыскания, подключенный к третьему входу четвертого сумматора через последовательно соединенные четвертый масштабирующий усилитель, второй инвертор, второй нелинейный блок, второй вход четвертого сумматора соединен с выходом четвертого масштабирующего усилителя, первый вход соединен через третий масштабирующий усилитель с выходом первого датчика угловой скорости рыскания, а выход соединен с шестым входом блока вычислений значений угла крена и первым входом второго сумматора, четвертый вход первого сумматора предназначен для подачи сигнала с выхода вычислителя значений угла крена, при этом первый и второй нелинейные блоки выполнены с возможностью реализации зависимости
где ym - ограниченное значение функции, a - граница пропорциональности функции, равная значению угловой скорости, при котором первый датчик угловой скорости ложится на упоры, x - сигнал, поступающий на вход нелинейного блока, y - сигнал, снимаемый с выхода нелинейного блока.
Сущность изобретения поясняется на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5 и фиг. 6. На фиг.1 представлена блок-схема системы управления боковым движением легкого самолета. На фиг. 2 - характеристика работы первого датчика угловой скорости крена. На фиг. 3 - характеристика работы второго датчика угловой скорости крена. На фиг. 4 - характеристика работы третьего сумматора. На фиг. 5 - характеристика работы первого нелинейного блока. На фиг. 6 - сумма сигналов на втором и третьем входах третьего сумматора.
Система управления боковым движением легкого самолета содержит первый датчик угловой скорости крена 1, последовательно соединенные первый сумматор 2, первый усилитель 3 и привод элеронов 4, датчик положения элеронов 5, вход которого связан с выходом привода элеронов 4, а выход с вторым входом первого сумматора 2, первый датчик угловой скорости рыскания 7, последовательно соединенные второй сумматор 8, второй усилитель 9 и привод руля направления 10, датчик положения руля направления 11, вход которого связан с выходом привода руля направления 10, а выход - с вторым входом второго сумматора 8, программное устройство 6, первый и второй выходы которого связаны с третьими входами соответственно первого 2 и второго сумматоров 8, вычислитель значений угла крена 12, акселерометр 13, датчик скорости полета 14, датчик высоты полета 15 и задатчик 16, выходы которых связаны соответственно с вторым, третьим, четвертым и пятым входами вычислителя значений угла крена 12, седьмой вход которого соединен с выходом датчика положения руля направления 11, дополнительно введенные второй датчик угловой скорости крена 17, подключенный к третьему входу третьего сумматора 20 через последовательно соединенные первый масштабирующий усилитель 18, первый инвертор 21, первый нелинейный блок 22, второй вход третьего сумматора 20 соединен с выходом первого масштабирующего усилителя 18, первый вход соединен через второй масштабирующий усилитель 19 с выходом первого датчика угловой скорости крена 1, а выход соединен с первым входом блока вычислений значений угла крена 12 и первым входом первого сумматора 2, второй датчик угловой скорости рыскания 23, подключенный к третьему входу четвертого сумматора 26 через последовательно соединенные четвертый масштабирующий усилитель 24, второй инвертор 27, второй нелинейный блок 28, второй вход четвертого сумматора 26 соединен с выходом четвертого масштабирующего усилителя 24, первый вход соединен через третий масштабирующий усилитель 25 с выходом первого датчика угловой скорости рыскания 7, а выход соединен с шестым входом блока вычислений значений угла крена 12 и первым входом второго сумматора 8, четвертый вход первого сумматора 2 предназначен для подачи сигнала с выхода вычислителя значений угла крена 12, при этом первый и второй нелинейные блоки выполнены с возможностью реализации зависимости
где ym - ограниченное значение функции, a - граница пропорциональности функции, равная значению угловой скорости, при котором первый датчик угловой скорости ложится на упоры, x - сигнал, поступающий на вход нелинейного блока, y - сигнал, снимаемый с выхода нелинейного блока.
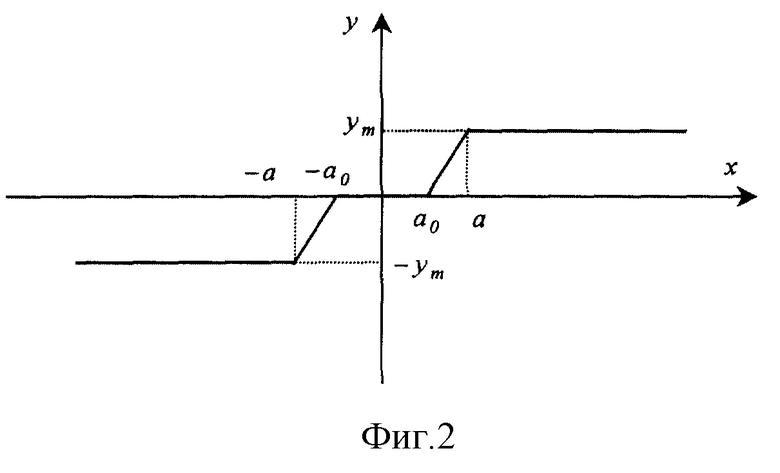
Характеристика работы первого датчика угловой скорости крена на фиг. 2 содержит следующие обозначения: ym - ограниченное значение выходного сигнала, a - граница пропорциональности, равная значению угловой скорости, при котором датчик угловой скорости ложится на упоры, a0 - минимальное измеряемое значение угловой скорости, x - сигнал на входе датчика угловой скорости, y - сигнал на выходе датчика угловой скорости.
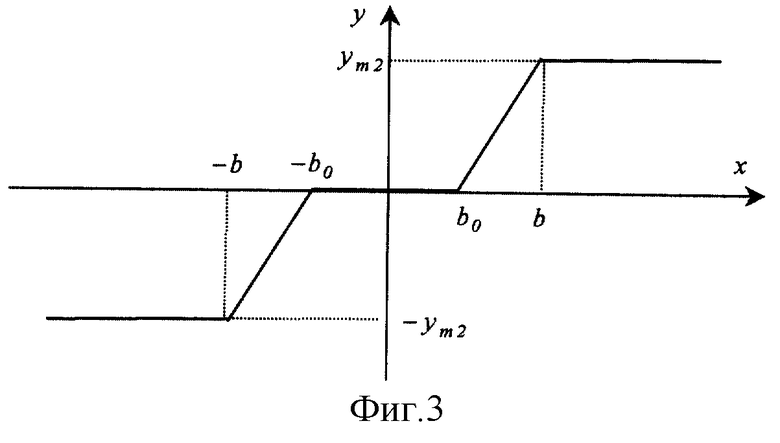
Характеристика работы второго датчика угловой скорости крена на фиг. 3 содержит обозначения: ym2 - ограниченное значение выходного сигнала, b - граница пропорциональности, равная значению угловой скорости, при котором датчик угловой скорости ложится на упоры, b0 - минимальное измеряемое значение угловой скорости, x - сигнал на входе датчика угловой скорости, y - сигнал на выходе датчика угловой скорости.
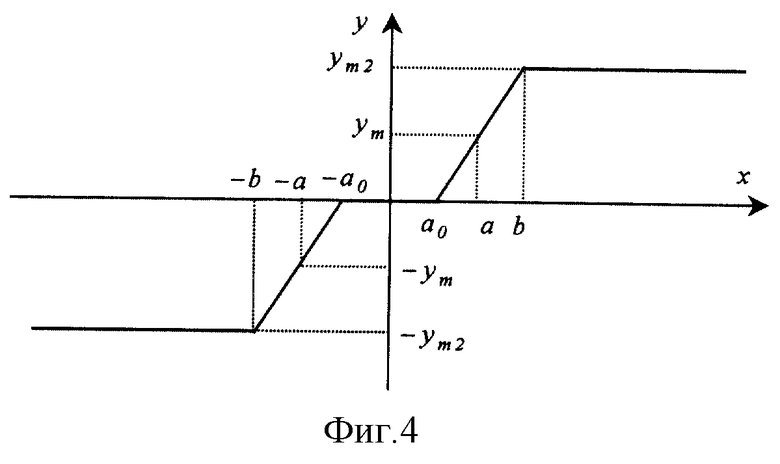
Характеристика работы третьего сумматора на фиг. 4 содержит следующие обозначения: ym - ограниченное значение выходного сигнала с первого датчика угловой скорости крена, ym2 - ограниченное значение выходного сигнала со второго датчика угловой скорости крена, a - граница пропорциональности, равная значению угловой скорости, при котором первый датчик угловой скорости ложится на упоры, b - граница пропорциональности, равная значению угловой скорости, при котором второй датчик угловой скорости ложится на упоры, a0 - минимальное измеряемое вторым датчиком угловой скорости крена значение угловой скорости, x - сигнал на входе блока, y - сигнал на выходе блока.
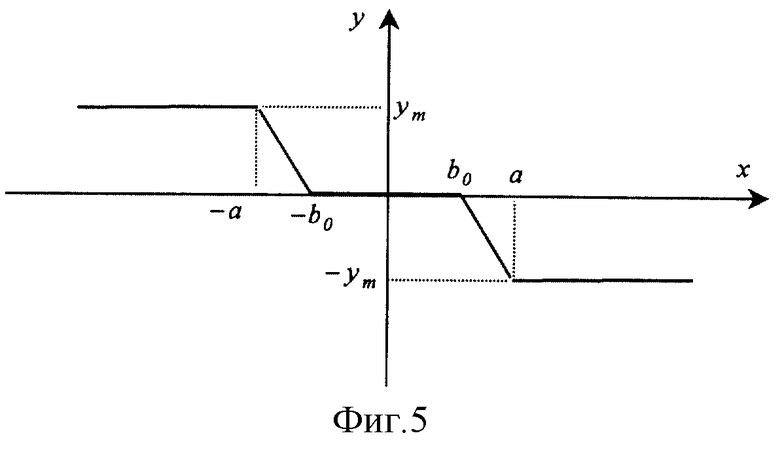
Характеристика работы первого нелинейного блока на фиг. 5 содержит следующие обозначения: a - граница пропорциональности, равная значению угловой скорости, при котором первый датчик угловой скорости ложится на упоры, b0 - минимальное измеряемое вторым датчиком угловой скорости крена значение угловой скорости, ym - ограниченное значение выходного сигнала с первого датчика угловой скорости крена, x - сигнал на входе блока, y - сигнал на выходе блока.
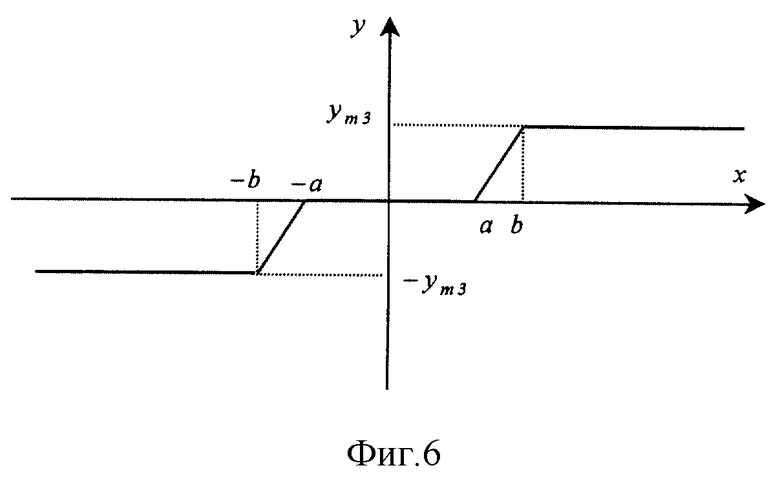
Сумма сигналов на втором и третьем входах третьего сумматора на фиг. 6 содержит обозначения: a - граница пропорциональности, равная значению угловой скорости, при котором первый датчик угловой скорости ложится на упоры, b - граница пропорциональности, равная значению угловой скорости, при котором второй датчик угловой скорости ложится на упоры, ym3 = ym2 - ym.
Система управления боковым движением легкого самолета работает следующим образом.
В системе реализованы законы управления с жесткой обратной связью. Законы управления имеют вид
в канале руля направления ,
,
в канале элеронов
где δH и δЭ - углы отклонения соответственно руля направления и элеронов; - угловые скорости соответственно рыскания и крена;
- угловые скорости соответственно рыскания и крена;
UН, UЭ - сигналы задатчика режимов движения самолета.
На пилотируемом летательном аппарате роль программного устройства (задающего устройства) 6 играют задатчики сигналов в каналы руля направления и элеронов, расположенные на пульте управления автопилота.
Чувствительными элементами системы управления боковым движением легкого самолета являются датчики угловой скорости крена 1, 17 и рыскания 7, 23, акселерометр 13, датчик скорости полета 14, датчик высоты полета 15. Датчик угловой скорости крена 1 обладает меньшей зоной застоя по сравнению с датчиком угловой скорости крена 17, однако при этом имеет и меньший рабочий диапазон. Рабочая характеристика датчика угловой скорости крена 1 представлена на фиг. 2. Область (-a0, a0) является зоной нечувствительности данного датчика. Участки [-a, -a0] и [a0, a] являются рабочей зоной датчика угловой скорости. Участки (-∞,-a0) и (a0,∞) - зона насыщения датчика угловой скорости. Если значение угловой скорости крена находиться в пределах этих участков, то сигнал на выходе блока 1 принимает постоянное значение, равное ym. Характеристика работы датчика угловой скорости 17 представлена на фиг. 3. Участок пропорциональности или рабочая зона датчика угловой скорости 17 лежит в области значений угловой скорости крена [-b, -b0] и [b0, b]. Область значений угловой скорости крена (-b0, b0) является зоной нечувствительности датчика угловой скорости 17. Если значение угловой скорости крена лежит в области (-∞,-b0) или (b0,∞), то выходной сигнал датчика угловой скорости крена 17 принимает значение ym2.
С выхода датчика угловой скорости 17 сигнал поступает на масштабирующий усилитель 18, выход которого соединен со входом инвертора 21 и вторым входом сумматора 20. С выхода инвертора 21 сигнал в противофазе к входному сигналу поступает на вход нелинейного блока 22. Работа нелинейного блока 22 описывается законом вида:
где ym - ограниченное значение функции, a - граница пропорциональности функции, равная значению угловой скорости крена, при котором датчик угловой скорости крена 1 ложится на упоры, x - сигнал, поступающий на вход нелинейного блока 22, y - сигнал, снимаемый с выхода нелинейного блока 22. Характеристика работы нелинейного блока 22 показана на фиг. 5. С выхода блока сигнал поступает на третий вход третьего сумматора 20. Сумма сигналов на втором и третьем входе сумматора представлена на фиг. 6.
Таким образом, пока датчик угловой скорости крена 1 не лег на упоры, то есть не вошел в зону ограничения, сигналы, поступающие на второй и третий входы третьего сумматора 20, равны по модулю, но противоположны по фазе. Их сумма будет равна нулевому значению, значит в этом случае они не оказывают никакого влияния на сигнал, снимаемый с выхода третьего сумматора 20. Это характеризуется областью (-a, a) на фиг. 6. При этом с выхода сумматора 20 будет сниматься сигнал, равный сигналу на выходе второго масштабирующего усилителя 19. Это характеризуется участками рабочей зоны (-a,-a0) и (a0, a) на фиг. 4, представляющей графическое изображение зависимости значений на выходе сумматора 20 от угловой скорости крена легкого самолета. При нарастании угловой скорости крена и достижении ей значения  датчик угловой скорости крена 1 ложится на упор и сигнал с его выхода принимает постоянное значение ym, независящее от дальнейшего возрастания модуля угловой скорости крена. В этом случае с выхода нелинейного блока 22 снимается также постоянный сигнал, равный - ym, суммируемый с сигналом с выхода первого масштабирующего усилителя 18 на сумматоре 20. В результате получается сигнал в виде суммы этих разнополярных сигналов, представленный участками (-b,-a) и (a, b) на фиг. 6. Эта сумма в качестве добавочной порции сигнала суммируется с сигналом с выхода второго масштабирующего усилителя 19, который в данном случае принимает свое максимальное значение. В результате получают рабочий участок (-b, -a) и (a, b) на фиг. 4, характеризующей выход сумматора 20. Сопряжение рабочей зоны датчиков угловой скорости крена 1 и 17 происходит при помощи масштабирующих усилителей 18 и 19, которые позволяют при необходимости менять наклон сопрягаемых прямых. Объединение двух гироскопических датчиков позволяет увеличить диапазон измерения угловой скорости крена при сохранении низкого порога чувствительности. Сигнал, пропорциональный угловой
датчик угловой скорости крена 1 ложится на упор и сигнал с его выхода принимает постоянное значение ym, независящее от дальнейшего возрастания модуля угловой скорости крена. В этом случае с выхода нелинейного блока 22 снимается также постоянный сигнал, равный - ym, суммируемый с сигналом с выхода первого масштабирующего усилителя 18 на сумматоре 20. В результате получается сигнал в виде суммы этих разнополярных сигналов, представленный участками (-b,-a) и (a, b) на фиг. 6. Эта сумма в качестве добавочной порции сигнала суммируется с сигналом с выхода второго масштабирующего усилителя 19, который в данном случае принимает свое максимальное значение. В результате получают рабочий участок (-b, -a) и (a, b) на фиг. 4, характеризующей выход сумматора 20. Сопряжение рабочей зоны датчиков угловой скорости крена 1 и 17 происходит при помощи масштабирующих усилителей 18 и 19, которые позволяют при необходимости менять наклон сопрягаемых прямых. Объединение двух гироскопических датчиков позволяет увеличить диапазон измерения угловой скорости крена при сохранении низкого порога чувствительности. Сигнал, пропорциональный угловой  скорости крена, с выхода третьего сумматора 20 поступает на первый вход сумматора 2 и на первый вход вычислителя значений угла крена 12. Датчик угловой скорости рыскания 7 обладает меньшей зоной застоя, по сравнению с датчиком угловой скорости рыскания 23, однако при этом имеет и меньший рабочий диапазон. Работа датчиков угловой скорости рыскания 7 и 23, масштабирующих усилителей 24, 25, инвертора 27, нелинейного блока 28 и сумматора 26 происходит аналогично работе однотипных блоков в канале угловой скорости крена. Сигнал, пропорциональный угловой скорости рыскания, снимается с выхода сумматора 26 и поступает на первый вход сумматора 8 и на шестой вход вычислителя 12. С выхода акселерометра 13 на второй вход вычислителя 12 подается сигнал, пропорциональный боковой перегрузке nz. На выходе датчика скорости полета 14 формируется сигнал, пропорциональный V, текущей скорости полета самолета, который поступает на третий вход вычислителя 12 значений угла крена. Программное устройство 6 формирует сигналы UН, UЭ задатчика режимов движения самолета, поступающие на третий вход сумматора 3 и на третий вход сумматора 2 соответственно. С выхода датчика 15 высоты полета на четвертый вход вычислителя 12 подается сигнал, пропорциональный H, текущей высоте полета самолета. На выходе задатчика 16 формируется сигнал, пропорциональный значению массовой плотности воздуха на уровне моря, который подается на пятый вход вычислителя 12 значений угла крена. На выходе вычислителя 12 формируется сигнал, пропорциональный текущему значению. Этот сигнал с выхода вычислителя 12 поступает на четвертый вход сумматора 2.
скорости крена, с выхода третьего сумматора 20 поступает на первый вход сумматора 2 и на первый вход вычислителя значений угла крена 12. Датчик угловой скорости рыскания 7 обладает меньшей зоной застоя, по сравнению с датчиком угловой скорости рыскания 23, однако при этом имеет и меньший рабочий диапазон. Работа датчиков угловой скорости рыскания 7 и 23, масштабирующих усилителей 24, 25, инвертора 27, нелинейного блока 28 и сумматора 26 происходит аналогично работе однотипных блоков в канале угловой скорости крена. Сигнал, пропорциональный угловой скорости рыскания, снимается с выхода сумматора 26 и поступает на первый вход сумматора 8 и на шестой вход вычислителя 12. С выхода акселерометра 13 на второй вход вычислителя 12 подается сигнал, пропорциональный боковой перегрузке nz. На выходе датчика скорости полета 14 формируется сигнал, пропорциональный V, текущей скорости полета самолета, который поступает на третий вход вычислителя 12 значений угла крена. Программное устройство 6 формирует сигналы UН, UЭ задатчика режимов движения самолета, поступающие на третий вход сумматора 3 и на третий вход сумматора 2 соответственно. С выхода датчика 15 высоты полета на четвертый вход вычислителя 12 подается сигнал, пропорциональный H, текущей высоте полета самолета. На выходе задатчика 16 формируется сигнал, пропорциональный значению массовой плотности воздуха на уровне моря, который подается на пятый вход вычислителя 12 значений угла крена. На выходе вычислителя 12 формируется сигнал, пропорциональный текущему значению. Этот сигнал с выхода вычислителя 12 поступает на четвертый вход сумматора 2.
Таким образом, благодаря введению дополнительных малогабаритных гироскопических датчиков измерения угловых скоростей с контуром их сопряжения получена система более точного управления боковым движением легкого самолета с уменьшенной погрешностью формирования угла крена, имеющая малый вес и габариты. В системе отсутствует релейное переключение датчиков, что повышает надежность системы, позволяет избежать точек разрыва при согласовании сигналов с двух датчиков и предотвращает ситуации с неоднозначностью полезного сигнала в момент переключения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СТАБИЛИЗИРУЕМЫМ ПАРАМЕТРОМ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2208243C1 |
| СПОСОБ ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ ЛЕГКОГО ЭКРАНОПЛАНА | 2000 |
|
RU2180131C1 |
| УСТРОЙСТВО ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕГКОГО ЭКРАНОПЛАНА | 2002 |
|
RU2231104C1 |
| СПОСОБ ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2007 |
|
RU2344460C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
Изобретение относится к системам автоматического регулирования полета и предназначено для стабилизации бокового движения легкого самолета. Технический результат заключается в уменьшении погрешности определения угла крена. Система управления боковым движением легкого самолета содержит первый и второй датчики угловой скорости крена, четыре сумматора, три усилителя, привод элеронов, датчик положения элеронов, первый и второй датчики угловой скорости рыскания, датчик положения руля направления, программное устройство, вычислитель значений угла крена, акселерометр, датчик скорости полета, датчик высоты полета, задатчик, четыре масштабирующих усилителя, два инвертора, два нелинейных блока. 6 ил.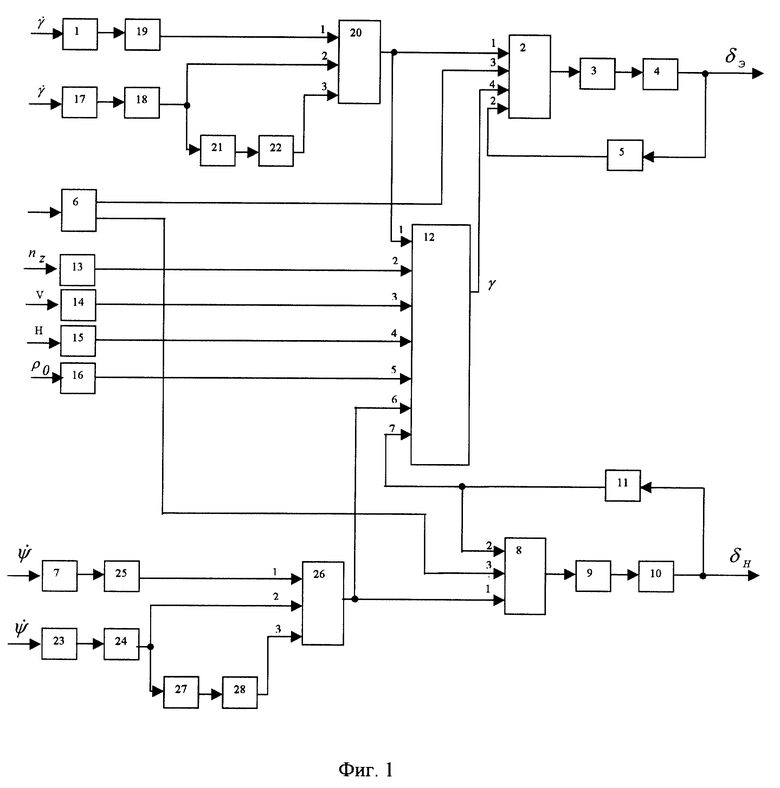
Система управления боковым движением легкого самолета, содержащая первый датчик угловой скорости крена, последовательно соединенные первый сумматор, первый усилитель и привод элеронов, датчик положения элеронов, вход которого связан с выходом привода элеронов, а выход с вторым входом первого сумматора, первый датчик угловой скорости рыскания, последовательно соединенные второй сумматор, второй усилитель и привод руля направления, датчик положения руля направления, вход которого связан с выходом привода руля направления, а выход - с вторым входом второго сумматора, программное устройство, первый и второй выходы которого связаны с третьими входами соответственно первого и второго сумматоров, вычислитель значений угла крена, акселерометр, датчик скорости полета, датчик высоты полета и задатчик, выходы которых связаны соответственно с вторым, третьим, четвертым и пятым входами вычислителя значений угла крена, седьмой вход которого соединен с выходом датчика положения руля направления, отличающаяся тем, что дополнительно введен второй датчик угловой скорости крена, подключенный к третьему входу третьего сумматора через последовательно соединенные первый масштабирующий усилитель, первый инвертор, первый нелинейный блок, второй вход третьего сумматора соединен с выходом первого масштабирующего усилителя, первый вход соединен через второй масштабирующий усилитель с выходом первого датчика угловой скорости крена, а выход соединен с первым входом блока вычислений значений угла крена и первым входом первого сумматора, второй датчик угловой скорости рыскания, подключенный к третьему входу четвертого сумматора через последовательно соединенные четвертый масштабирующий усилитель, второй инвертор, второй нелинейный блок, второй вход четвертого сумматора соединен с выходом четвертого масштабирующего усилителя, первый вход соединен через третий масштабирующий усилитель с выходом первого датчика угловой скорости рыскания, а выход соединен с шестым входом блока вычислений значений угла крена и первым входом второго сумматора, четвертый вход первого сумматора предназначен для подачи сигнала с выхода вычислителя значений угла крена, при этом первый и второй нелинейные блоки выполнены с возможностью реализации зависимости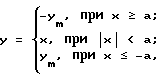
где уm - ограниченное значение функции;
а - граница пропорциональности функции, равная значению угловой скорости, при котором первый датчик угловой скорости ложится на упоры;
х - сигнал, поступающий на вход нелинейного блока;
у - сигнал, снимаемый с выхода нелинейного блока.
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| Система управления боковым движением беспилотного малоразмерного летательного аппарата | 1990 |
|
SU1825746A1 |
| US 3980258 А, 14.09.1976 | |||
| Бортовые системы управления полетом | |||
| /Под ред | |||
| Ю.В.БАЙБОРОДИНА | |||
| - М.: Транспорт, 1975, с.234. | |||

