Изобретение касается автоматического регулирования и относится к системам обеспечения устойчивости беспилотных малоразмерных летательных аппаратов (МЛА).
Наиболее близким по технической сущности к изобретению является демпфер типа АП-196 М. Основными элементами этого демпфера являются в каждом канале (тангажа, рыскания, крена) датчик угловой скорости, датчик скоростного напора, усилитель с переменным коэффициентом усиления, сумматор, усилитель, привод руля, обратная связь. В рассматриваемом демпфере реализуется закон управления.
δ= k(q˙ω) (1) где q скоростной напор;
ω- угловая скорость.
При отклонении руля образуется демпфирующий момент, который всегда направлен против угловой скорости и способствует эффективному затуханию колебаний.
Недостаток описанного выше демпфера типа АП-106М состоит в том, что в нем не учтена специфика МЛА, которая создает определенные трудности при их управлении. Демпфер АП-106М не обеспечивает поперечной устойчивости МЛА и не устраняет взаимного влияния между боковым и продольным движениями, которое мешает надежному управлению МЛА. Под надежностью управления МЛА здесь и дальше по тексту понимается соответствие между сигналами управления в каналах автомата устойчивости и параметрами движения МЛА, когда каждому конкретному управлению однозначно соответствует определенная реакция МЛА. Очевидно, что взаимное влияние бокового и продольного движений нарушает это соответствие и мешает целенаправленному управлению движением МЛА.
Целью изобретения является повышение поперечной устойчивости и устранение взаимного влияния продольного и бокового движений.
На чертеже приведена структурная схема автомата устойчивости биспилотного МЛА.
Автомат устойчивости содержит: датчик 1 угловой скорости тангажа, усилитель 2 с переменным коэффициентом усиления канала тангажа, сумматор 3 канала тангажа, усилитель 4 канала тангажа, привод 5 рулей высоты, блок 6 обратной связи канала тангажа, датчик 7 угловой скорости рыскания, усилитель 8 с переменным коэффициентом усиления канала рыскания, сумматор 9 канала рыскания, усилитель 10 канала рыскания, привод 11 руля направления, блок 12 обратной связи канала рыскания, датчик 13 угловой скорости крена, усилитель 14 с переменным коэффициентом усиления канала крена, сумматор 15 канала крена, усилитель 16 канала крена, привод 17 элеронов, блок 18 обратной связи канала крена, датчик 19 скоростного напора, датчик 20 оборотов двигателя, первый блок 21 умножения, вторая блок 22 умножения, акселерометр 23, изодромное звено 24, задатчик 25 режимов движения МЛА.
Действие предлагаемого автомата устойчивости в боковом движении базируется на взаимосвязи угла крена γ и угловой скорости ωq. Физика явления состоит в следующем.
Представим, что ЛА приобрел случайный крен γ Вследствие крена возникает проекция подъемной аэродинамической силы Y на горизонтальную плоскость, равная Ysin γ Под действием этой силы ЛА получит некоторую дополнительную боковую скорость движения V2, что вызовет появление скольжения в сторону опущенного крыла. С появлением скольжения возникает момент статической устойчивости пути (флюгерный момент) Mуβ β. Под его влиянием начнется разворот ЛА по курсу в сторону совмещения его продольной оси ОХ, с вектором воздушной скорости. Появится сигнал ωу, который будет существовать до тех пор, пока существует крен. Эта взаимосвязь γ и ωу позволяет не ставить на борт датчик кренов.
В предлагаемом автомате поперечная устойчивость обеспечивается за счет формирования в канале крена сигнала Kωyэ ωy действующего как обычная отрицательная обратная связь. При этом даже в случае апериодической неустойчивости МЛА соответствующим отклонением элеронов создается восстанавливающий момент относительно продольной оси ОХ1который вернет ЛА в горизонтальное положение и ликвидирует крен.
Введение в канал крена сигнала Kωyэ ωy с выхода датчика угловой скорости рыскания было бы достаточным для обеспечения поперечной устойчивости, если бы все ЛА обладали хорошо выраженными флюгерными свойствами. Но в общем случае флюгерные свойства МЛА могут быть слабыми (например, при малой площади вертикального оперения), в силу чего скольжение само по себе не вызовет появления угловой скорости ωу. В этом случае взаимная связь движений рыскания и крена будет недостаточной для обеспечения требуемого запаса устойчивости замкнутой системы и качества переходных процессов по крену. Так как сигнал по перегрузке nzэквивалентен сигналу по β, то введение этого сигнала с соответствующим знаком в канал направления будет способствовать искусственному увеличению флюгерных свойств МЛА. Отклонение руля направления по сигналу nz вызывает быстрое появление угловой скорости ωу, что повышает быстродействие канала крена автомата устойчивости.
С другой стороны флюгерные свойства ЛА ухудшают его реакцию на ветровые возмущения. Так, при наличии порывов ветра МЛА резко отклоняется по курсу, и в свою очередь рыскание по курсу вызывает крен МЛА (за счет наличия рассмотренного выше сигнала Kωyэ ωy в канале крена). С целью уменьшения влияния ветрового возмущения на МЛА в канал рыскания автомате устойчивости введено изодромное звено в цепи сигнала ωу, которое при порывах ветра эффективно противодействует моменту Mуβ β, который в этом случае играет роль возмущающего момента. При разворотах влияние этого звена практически отсутствует, так как оно пропускает только переменную составляющую угловой скорости ωу, т.е. не препятствует выполнению маневра.
Рассмотрим работу автомата устойчивости беспилотного МЛА. Автомат имеет три канала управления. В автомате реализованы законы управления с жесткой обратной связью. Законы управления имеют вид: в канале руля направления
δн= K 1+K
1+K -K
-K
Здесь δн,δэ,δв углы отклонения, соответственно, руля направления, элеронов, руля высоты;
ωx, ωy, ωz- угловые скорости МЛА относительно связанных осей ОХ1, ОY1, OZ1;
Uн, Uэ, Uв сигналы задатчика 25 режимов движения МЛА.
Чувствительными элементами автомата устойчивости являются датчики 1, 7, 13 угловых скоростей (скоростные гироскопы), датчик 19 скоростного напора, датчик 20 оборотов двигателя и акселерометр 23.
Отклонение руля направления в канале рыскания происходит в соответствии с уравнением (3). Первый член описывает демпфер колебаний рыскания. Вводя в закон управления сигнал по ωу, мы искусственно увеличивает демпфирование МЛА, что способствует более быстрому затуханию колебаний. А необходимость введения изодромного звена 42 в цепи сигнала ωу (формируемого скоростным гироскопом 7), вызвана возможными ветровыми возмущениями. Изодромное звено  в режиме установившегося разворота не пропускает постоянную составляющую в результате чего эта составляющая сигнала не препятствует выполнению разворота. В то же время как в режиме выполнения разворота, так и в режиме стабилизации прямолинейного полета изодромное звено хорошо пропускает переменную составляющую ωу. Поэтому роль направления парирует воздействующие на МЛА ветровые возмущения, вызывающие резкое изменение угловой.
в режиме установившегося разворота не пропускает постоянную составляющую в результате чего эта составляющая сигнала не препятствует выполнению разворота. В то же время как в режиме выполнения разворота, так и в режиме стабилизации прямолинейного полета изодромное звено хорошо пропускает переменную составляющую ωу. Поэтому роль направления парирует воздействующие на МЛА ветровые возмущения, вызывающие резкое изменение угловой.
Сигнал по угловой скорости ωz (снимаемый с выхода скоростного гироскопа 1), поданный в канал руля направления, предназначен для устранения влияния продольного движения на движение рыскания за счет компенсации действия гироскопического момента двигателя Мyг loΩ∂˙ωz. Сигнал, пропорциональный боковой перегрузке nz выдается акселерометром 23. Его включение в канал руля направления необходимо для обеспечения требуемого запаса устойчивости замкнутой системы и качества переходных процессов по крену независимо от флюгерных свойств МЛА. Формирование управляющего сигнала канала рыскания выполняется сумматором 9. Выходной сигнал сумматора 9 через усилитель 10 поступает на привод руля направления 11 и его рулевая машина отклоняет руль на величину, пропорциональную управляющему сигналу, что обеспечивается за счет блока обратной связи 12. При отклонении руля направления создается момент относительно нормальной оси, под действием которого МЛА поворачивается в горизонтальной плоскости.
Канал тангажа автомата устойчивости МЛА, включающий руль высоты по своей структуре и по принципу действия аналогичен каналу рыскания, рассмотренному выше. Закон управления в канале тангажа имеет вид (4). Первый член описывает демпфер тангажа, а второй отражает перекрестную связь с каналом рыскания, которая обеспечивает парирование действия гироскопического момента Mzг loΩ∂˙ωz. возникающего относительно поперечной оси ЛА при его вираже с угловой скоростью ωу. В состав канала тангажа входят сумматор 3, усилитель 4, привод руля высоты 5, блок обратной связи 6, имеющие такое же назначение как аналогичные элементы канала рыскания.
В законе управления (5) канала крена первый член описывает демпфер колебаний крена. Сигнал ωx поступает от скоростного гироскопа 13. Сигнал, пропорциональный угловой скорости ωу, измеряемой скоростным гироскопом 7, является основным сигналом этого канала и вводится в закон управления, чтобы обеспечить поперечную устойчивость МЛА. При этом даже в случае апериодической неустойчивости МЛА соответствующим отклонением элеронов создается восстанавливающий момент относительно продольной оси ОХ1, который вернет ЛА в горизонтальное положение и ликвидирует крен.
Также, как и каналы рыскания и тангажа, канал крена содержит сумматор 15, усилитель 16, привод элеронов 17, блок обратной связи 18. В каждом из каналов автомата устойчивости изменение передаточных чисел Kωyн,Kωzв,Kωxэ демпферов осуществляется по сигналам датчика скоростного напора 19, воздействующим на усилители с переменным коэффициентом усиления 2, 8, 14 в каналах тангажа, рыскания и крена, соответственно. Перекрестные связи ωy ωy_→ δв δв и ωz ω2_→ δн δн введенные в автомат устойчивости для парирования действия гироскопических моментов двигателя, проходят через первый и второй блоки умножения 21, 22, вторые входы которых являются входами по сигналу датчика оборотов двигателя 20. Это необходимо для полной компенсации гироскопических моментов, так как последние зависят от числа оборотов винта двигателя.
На выходе блоков умножения получают сигнал
Uвых. К˙ U1˙ U2, где К масштабный коэффициент;
U1 сигнал с выхода датчика оборотов двигателя 20;
U2 сигнал с выхода соответствующего скоростного гироскопа. Изодромное звено 24 имеет передаточную функцию вида
W(p) Kи
Автомат устойчивости имея малые габариты и стоимость, благодаря нетрадиционному решению гарантирует однозначность управления МЛА при подаче управляющих воздействий в каналы тангажа и рыскания, обеспечивает поперечную устойчивость ЛА, когда в составе бортового оборудования нет позиционных датчиков, при удовлетворительной реакции на ветровые возмущения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автопилот | 1990 |
|
SU1802357A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
Изобретение касается автоматического регулирования и относится к системам обеспечения устойчивости беспилотных малоразмерных летательных аппаратов (МЛА). Целью изобретения является повышение поперечной устойчивости и устранение взаимного влияния продольного и бокового движений. Для достижения поставленной цели в трехканальный автомат устойчивости дополнительно вводятся первый 21 и второй 22 блоки умножения, датчик 20 оборотов двигателя, акселерометр 23, изодромное звено 24. При этом первые входы первого и второго блоков умножения соединены соответственно с выходами датчика 7 угловой скорости рыскания и датчика 1 угловой скорости тангажа, а выходы соединены соответственно с входами сумматоров канала тангажа и рыскания. Вторые входы блоков умножения соединены с выходом датчика оборотов двигателя. Изодромное звено введено в канал рыскания, а выход датчика угловой скорости рыскания соединен с входом сумматора канала крена. 1 з. п. ф-лы, 1 ил.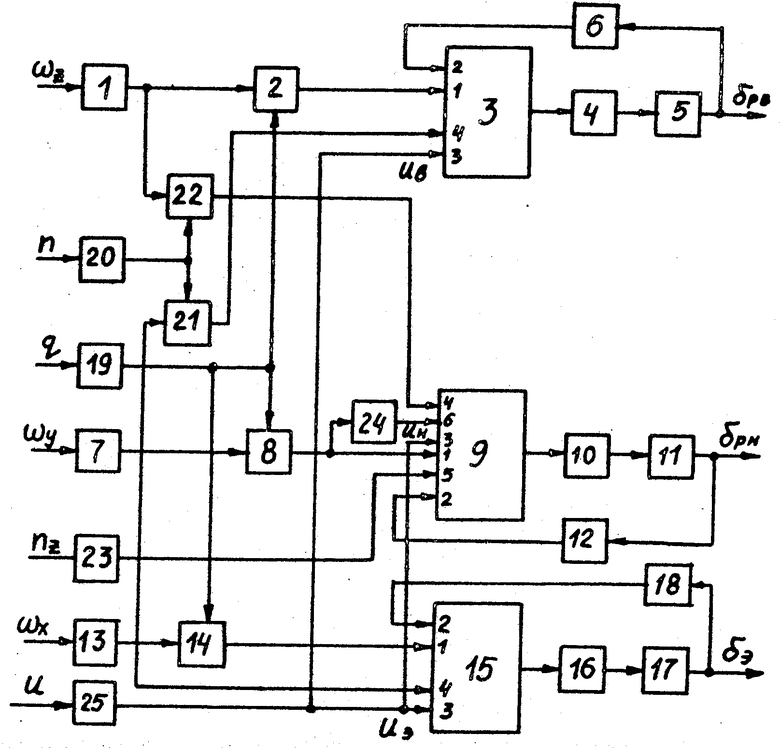
| Боднер В.А | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение, 1973, с.31-35, 80-81, 178-185. |
