Изобретение относится к морскому транспорту, в частности к техническим средствам исследования и освоения океана, и предназначено для обеспечения требуемого режима буксировки подводного аппарата вблизи дна.
Известна система управления величиной отстояния подводного аппарата от дна, использующая пассивные средства [1] Основным элементом такой системы является гайдропное устройство, прикрепляемое к ходовому концу несущего кабель-троса. В этой же точке закрепляют углубитель и подводный аппарат на оттяжке.
Указанная система не позволяет обследователь с достаточной точностью рельеф дна при значительных изменениях диапазона перепада глубин или с необходимой точностью удерживать подводный аппарат, например, снабженный телекамерой, в заданном диапазоне расстояний от дна.
Изобретение направлено на решение задачи и получение технического результата, заключающегося в повышении точности отслеживания рельефа дна во всем диапазоне эксплуатационных глубин погружения подводного аппарата путем удержания его в заданном диапазоне расстояний от дна при переменном рельефе.
Для этого в буксирной системе подводный аппарат заключен в рамку и шарнирно установлен на ее внутренней оси вращения, которая располагается горизонтально и перпендикулярно к диаметральной плоскости подводного аппарата, а для связи подводного аппарата с кабель-тросом и заглубителем введен между ними промежуточный кабель-трос, снабженный поплавками, и его ходовой конец прикреплен к верхней части упомянутой рамки, а к ее нижней части прикреплено гайдропное устройство.
За счет поплавков на промежуточном кабель-тросе последний будет иметь практически нулевую плавучесть и при буксировке будет стремиться занять горизонтальное положение. Благодаря прикреплению к ходовому концу введенного промежуточного кабель-троса через рамку подводного аппарата и гайдропного устройства достигается удержание и отслеживание движения подводного аппарата на заданном расстоянии от дна. Вследствие установки подводного аппарата подвижно на внутренней оси вращения рамки он всегда будет занимать горизонтальное положение независимо от условий буксировки. Кроме того, увеличение длины промежуточного кабель-троса позволяет расширить диапазон отслеживания перепадов глубин.
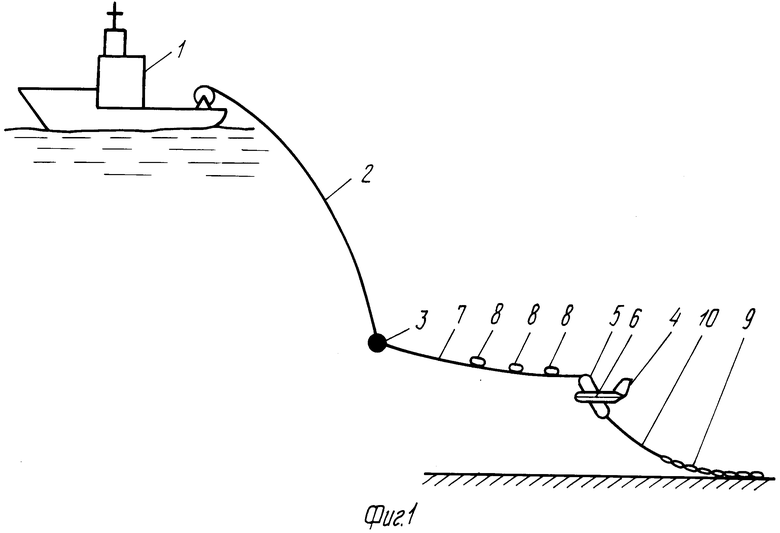
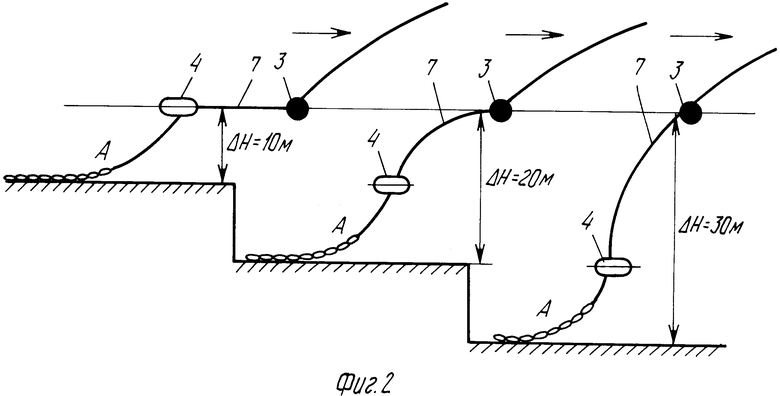
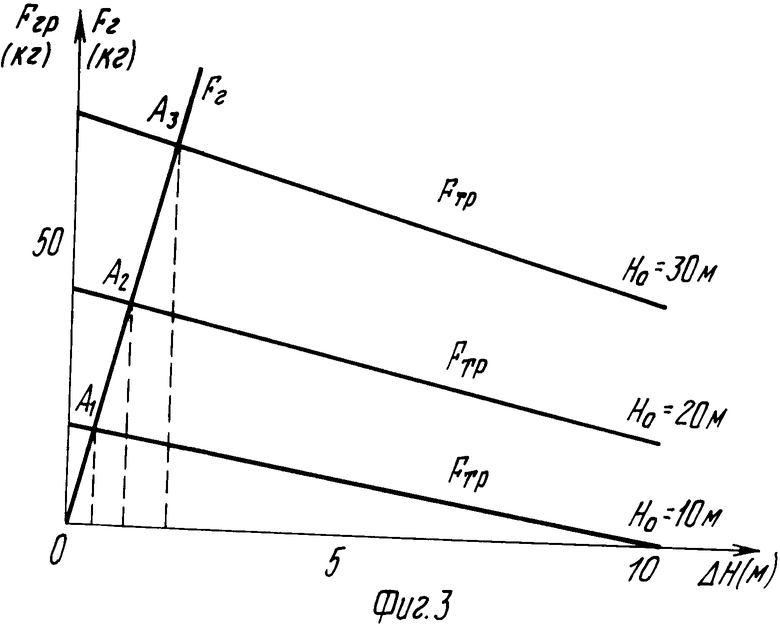
На фиг. 1 изображена схема буксирной системы; на фиг. 2 положение буксирной системы при изменении рельефа дна и различных глубинах; на фиг. 3 зависимости сил, действующих на подводный аппарат со стороны троса и гайдропа.
На схеме изображено судно-буксировщик 1 с вытравленным несущим кабель-тросом 2, на конце которого подвешен углубитель 3. Подводный аппарат 4 заключен в рамку 5 и шарнирно установлен на внутренней ее оси вращения 6, которая располагается горизонтально и перпендикулярно к диаметральной плоскости подводного аппарата. Между подводным аппаратом 4 и несущим кабель-тросом 2 с углубителем 3 введен связывающий их промежуточный кабель-трос 7 с поплавками 8, ходовой конец которого прикреплен к верхней части рамки 5. К нижней части рамки 5 прикреплено гайдропное устройство, состоящее из гайдропа (ползуна) 9 и оттяжки 10 гайдропа.
Углубитель 3 может быть выполнен либо в виде решетки (гидродинамический вариант), либо в виде груза (статический вариант).
Обеспечение удержания подводного аппарата в заданном диапазоне расстояний до дна при переменном рельефе и постоянном заглублении промежуточного звена возможно, если во всем этом диапазоне обеспечивается баланс сил, действующих на подводный аппарат со стороны троса и гайдропа. Предлагаемая схема и система как раз и позволяют добиться такого баланса, причем наличие промежуточного кабель-троса уменьшает силу, действующую на подводный аппарат со стороны буксира, а значит и снижает массу гайдропа.
На фиг. 3 изображены зависимости сил, действующих на подводный аппарат со стороны троса и гайдропа. Длина промежуточного троса принята равной 150 м. Плавучесть его нулевая, поэтому ненагруженный трос занимает горизонтальное положение. Если к ходовому концу этого троса, где расположен аппарат, приложена сила Fтр, то он будет перемещаться ко дну на величину Δ Н. Исходное состояние от дна углубителя (а значит и аппарата) принято равным 30 м, а затем определялись зависимости натяжения в тросе Fтр. при перемещении аппарата ко дну (сплошные кривые). Положения системы для этих случаев изображены фиг. 2.
Видно, что при увеличении глубины для удержания подводного аппарата на заданном расстоянии требуется большее усилие, при этом натяжение в промежуточном тросе также растет. Эта сила реализуется за счет вытягивания гайдропа, т.е. увеличения отстояния точки А от дна (фиг. 3). Зависимость силы, создаваемой за счет такого перемещения и приложенной к подводному аппарату со стороны гайдропа Fг, приведена на фиг. 3 (пунктирные кривые). Точки пересечения пунктирной и сплошных линий соответствуют равновесным положениям. В частности, если Но=10 м, то расстояние от подводного аппарата до дна будет 0,5 м, если Но=20 м, то это расстояние будет 1,0 м. Таким образом, при перепаде рельефа в 20 м изменение в отстоянии от дна подводного аппарата будет равно от 0,6 до 2 м. Указанные расчеты проведены для гайдропа массой 300 кг. Можно добиться уменьшения изменения отстояния, если увеличить массу гайдропа.
Целесообразно изменить точку крепления подводного аппарата к тросу таким образом, чтобы эти изменения сделать в пределах 2,5-4 м.
Для этого аппарат следует несколько сдвинуть вверх по тросу, т.е. между ползуном гайдропа и аппаратом расположить оттяжку, как это и показано на фиг. 1.
Если максимальная глубина 200 м, а желаемый для отслеживания на таких глубинах перепад высоты рельефа дна 20 м, то исходное заглубление подводного аппарата должно быть около 170 м. При указанных параметрах кабель-троса и скоростях буксировки достичь таких глубин можно при использовании несущего кабель-троса длиной 350-400 м и статического заглубителя массой 400 кг (от промежуточного заглубителя к аппарату должен идти разгруженный участок кабель-троса). Для данного кабель-троса этого можно достичь за счет установки вдоль него элементов плавучести (поплавков). Так, при длине троса 150 м и заданном погонном весе в воде достаточно разместить на нем 20 поплавков (через каждые 7-8 м), имеющих положительную плавучесть около 10 кг.
Следующий элемент-гайдропное устройство, состоящее из гайдропа (ползуна) и оттяжки. Эффективность его в работе зависит от массы и длины ползуна, а также коэффициента трения ползуна о грунт. При этом требуемая эффективность определяется допустимыми размерами коридора отстояний от дна и точности отслеживания рельефа. Последнее задается углом наклона прямой А1А3 на фиг. 3.
Поскольку действительный коэффициент трения ползуна о грунт не известен и, как показали опыты, он находится в пределах 0-0,5, а сила трения в пределах 8-50 кг, то при расчетах целесообразно принять значение 50 кг, а затем корректировать в зависимости от условий эксплуатации.
В результате, гайдроп (ползун) должен иметь длину 2 м, а вес 100 кг. При этом точка крепления ползуна к тросу будет двигаться на расстоянии 0,5-1,5 м от дна. Для удержания подводного аппарата в коридоре 5±0,5 м от дна длина оттяжки между ползуном и аппаратом в этом случае должна быть равной 4-6 м.
На подводный аппарат действуют силы натяжения от троса (вверх) и от оттяжки гайдропа (вниз). Для уменьшения влияния этих сил на динамику подводного аппарата последний размещают внутри рамки и устанавливают подвижно на поперечной ее внутренней оси вращения, перпендикулярной к диаметральной плоскости подводного аппарата. Трос и оттяжка гайдропа крепятся к противоположным концам рамки. Поэтому при изменении каких-либо условий буксировки меняется лишь угол наклона рамы, а сам аппарат всегда занимает горизонтальное положение.
При этом расположение оси по отношению к аппарату выбирается из условия устойчивости режима буксировки аппарата по дифференту. Рекомендуется, чтобы ось проходила вблизи центра тяжести подводного аппарата, тогда за счет выбора площади его горизонтального оперения всегда можно обеспечить устойчивый режим его движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1992 |
|
RU2015059C1 |
| ГИДРОДИНАМИЧЕСКИЙ ТРАЛ | 2009 |
|
RU2413650C1 |
| БУКСИРУЕМАЯ ЛИНИЯ | 2007 |
|
RU2361773C1 |
| УСТРОЙСТВО ДЛЯ ПРИДОННОГО ДВИЖЕНИЯ ПОДВОДНОГО АППАРАТА | 2018 |
|
RU2698598C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| ПОДВОДНАЯ БУКСИРУЕМАЯ ПОИСКОВАЯ СИСТЕМА | 2009 |
|
RU2410280C1 |
| УСТРОЙСТВО ФИКСАЦИИ БУКСИРУЕМОЙ ЛИНИИ НА БАРАБАНЕ БУКСИРНОЙ ЛЕБЕДКИ | 2007 |
|
RU2351501C1 |
| Устройство для моделирования буксируемой системы | 1991 |
|
SU1833823A1 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
Использование: в морском транспорте при буксировании подводного аппарата вблизи дна. Сущность: буксирная система содержит промежуточный разгруженный кабель-трос, соединенный с гайдропным устройством посредством рамки, внутри которой размещают подводный аппарат. Использование такой конструкции позволяет повысить точность отслеживания рельефа дна в рабочем диапазоне глубин погружения подводного аппарата. 3 ил.
БУКСИРНАЯ СИСТЕМА ПОДВОДНОГО АППАРАТА, включающая в себя судно-буксировщик, несущий кабель-трос с углубителем, к которому одним концом присоединен промежуточный кабель-трос, а также подводный аппарат и гайдропное устройство, отличающаяся тем, что она снабжена рамкой с внутренней осью, на которой с возможностью поворота установлен подводный аппарат, диаметральная плоскость которого перпендикулярна этой оси, при этом промежуточный кабель - трос снабжен поплавками и прикреплен другим своим концом к верхней части указанной рамки, а гайдропное устройство прикреплено к нижней части рамки.
| Егоров В.И | |||
| Подводные буксирующие системы | |||
| Л.: Судостроение, 1981, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
