Изобретение относится к подводной технике и направлено на совершенствование движительно-рулевого комплекса необитаемого подводного аппарата.
Наиболее близким по технической сущности к заявленному техническому решению является необитаемый подводный аппарат RCV-225, содержащий корпус, выполненный в виде блока плавучести с каналами в нем, движительно-рулевой комплекс с электроприводами и размещенными в каналах гребными винтами, электрораспределительный узел и кабели с вводами.
Недостатком известного устройства является то, что в нем не обеспечивается управление по дифференту, что является следствием невозможности размещения еще двух необходимых органов управления и их приводов из-за ограниченности массогабаритных характеристик аппарата. Таким образом, возникает противоречие между необходимостью ввести нужное количество движителей для обеспечения его управляемости по пяти степеням свободы и необходимостью уменьшить массогабаритные характеристики.
Технический результат изобретения заключается в уменьшении габаритов подводного аппарата при одновременном увеличении количества органов управления и в обеспечении необходимой маневренности по пяти степеням свободы.
Технический результат достигается тем, что необитаемый подводный аппарат, содержащий корпус, выполненный в виде блока плавучести с каналами в нем, движительно-рулевой комплекс с электроприводами и размещенными в каналах гребными винтами, электрораспределительный узел и кабели с вводами, снабжен помещенным в блок плавучести герметичным боксом с размещенными в нем электроприводами гребных винтов и электрораспределительным узлом, блок плавучести выполнен в виде несущего элемента корпуса подводного аппарата, корпус бокса, заполненный охлаждающей химически нейтральной жидкостью, выполнен с крышкой в виде компенсирующей мембраны и боковыми стенками с закрепленными на них вводами кабелей и с горловинами, через которые проходят валы электроприводов, а снаружи корпуса на горловинах установлены винтовые колонки с гребными винтами, связанными с валами электроприводов.
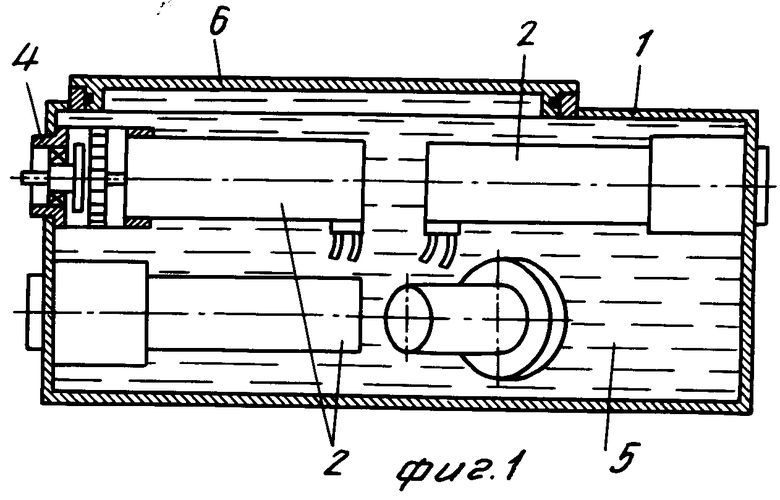
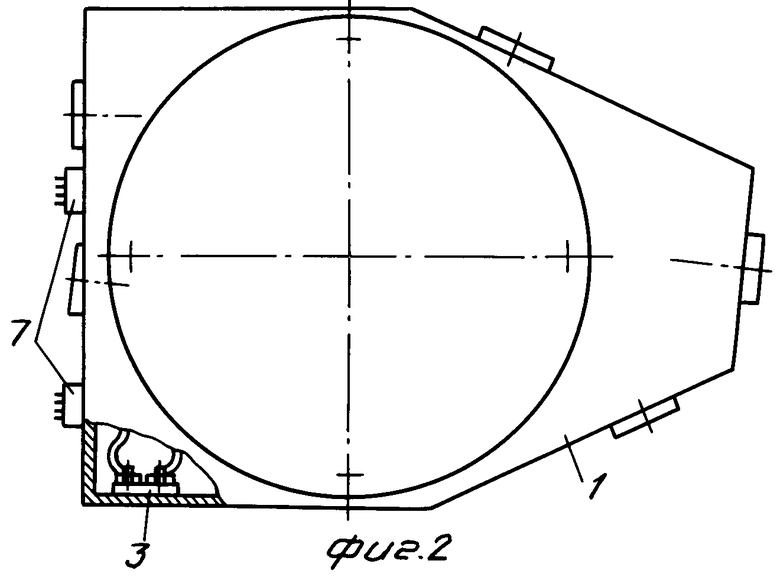
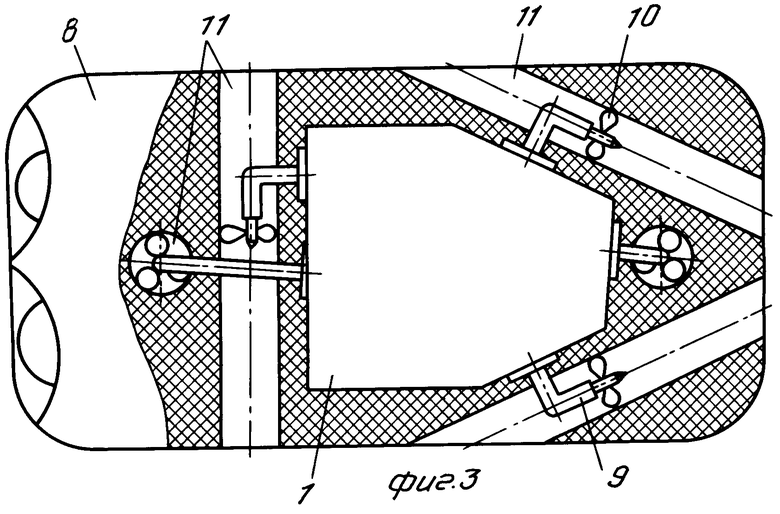
На фиг. 1 изображена конструкция бокса; на фиг. 2 - внешний вид бокса; на фиг. 3 - конструкция подводного аппарата с боксом.
Корпус бокса 1 имеет замкнутую форму с поперечным сечением в виде многоугольника. Число граней определяется числом размещенных внутри бокса приводов гребных винтов: маршевых, лаговых и вертикальных, размещенных в корпусе аппарата (в предлагаемой конструкции их пять).
Приводы 2 и электрораспределительный узел 3 закреплены на внутренних гранях корпуса бокса, а на наружных сторонах в горловинах установлены угловые колонки 4 с гребными винтами. Модуль выполнен в погружном исполнении и залит охлаждающей химически нейтральной жидкостью 5. Для компенсации действия на корпус внешнего гидростатического давления одна из крышек 6 корпуса бокса выполнена в виде податливой мембраны. В корпусе бокса размещены вводы кабелей 7.
На фиг. 3 изображен подводный аппарат, выполненный в виде блока плавучести с корпусом 8, в котором размещены бокс 1 и винтовые колонки 9 с гребными винтами 10 в каналах 11, проходящих внутри блока плавучести. Изменять расположение гребных винтов можно как за счет изменения длины промежуточных валов и размеров колонок, так и за счет расположения горловин модуля, кроме того, и за счет расположения модуля внутри корпуса аппарата.
Такая конструкция позволяет устанавливать внутри модуля электродвигатели не только без прочного корпуса, но и без наружного кожуха, что с учетом заполнения модуля жидкостью обеспечивает хорошее охлаждение электродвигателей и создает благоприятные условия для их работы, а также совместно с одной из крышек корпуса герметичного бокса, выполненной в виде податливой мембраны, обеспечивает разгрузку корпуса бокса от действия внешнего гидростатического давления на глубине.
Описанная конструкция имеет еще одно важное преимущество, заключающееся в том, что исключена необходимость установки отдельных для каждого электропривода герметичных вводов кабеля питания и управления оборотами электродвигателей. Это позволяет уменьшить массу аппарата, а также упростить электромонтажную схему оборудования. Такой модуль может быть унифицирован и использоваться для целого ряда аналогичных по габаритам подводных аппаратов.
Наконец, важным достоинством описанной компоновки является удобство смещения модуля внутри корпуса аппарата по сравнению с прототипом, где гондолы, в которые помещен каждый электродвигатель, размещают и закрепляют по отдельности, что затрудняет вывеску аппарата и обеспечение необходимой остойчивости. Сокращение же количества отдельных элементов корпуса аппарата облегчает процесс его вывески.
Использование данного предложения при разработке корпуса подводного аппарата позволит уменьшить его массогабаритные характеристики и улучшить маневренные свойства.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРНАЯ СИСТЕМА ПОДВОДНОГО АППАРАТА | 1992 |
|
RU2042566C1 |
| ГЛУБОКОВОДНЫЙ ОПУСКАЕМЫЙ АППАРАТ ПРЕДЕЛЬНЫХ ГЛУБИН | 2002 |
|
RU2203833C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| ГЛУБОКОВОДНЫЙ АППАРАТ | 2010 |
|
RU2440275C1 |
| МОДУЛЬНЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2022 |
|
RU2792358C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ СУДОВОЙ ГИДРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2009 |
|
RU2396182C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
Использование: в области подводной техники для совершенствования движительно-рулевого комплекса необитаемого подводного аппарата. Сущность изобретения: необитаемый подводный аппарат, содержащий корпус, движительно-рулевой комплекс с электроприводами и размещенными в каналах гребными винтами, электрораспределительный узел и кабели с вводами, снабженный герметичным боксом с размещенными в нем электроприводами гребных винтов и электрораспределительным узлом, а корпус бокса, заполненный охлаждающей химически нейтральной жидкостью, выполнен с крышкой в виде компенсирующей мембраны. 3 ил.
НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ, содержащий корпус, выполненный в виде блока плавучести с каналами в нем, движительно-рулевой комплекс с электроприводами и размещенными в каналах гребными винтами, электрораспределительный узел и кабели с вводами, отличающийся тем, что он снабжен помещенным в блок плавучести герметичным боксом с размещенными в нем электроприводами гребных винтов и электрораспределительным узлом, блок плавучести выполнен в виде несущего элемента корпуса подводного аппарата, корпус бокса, заполненный охлаждающей химически нейтральной жидкостью, выполнен с крышкой в виде компенсирующей мембраны и боковыми стенками с закрепленными на них вводами кабелей и горловинами, через которые проходят валы электроприводов, а снаружи корпуса на горловинах установлены винтовые колонки с гребными винтами, связанными с валами электроприводов.
| Милн П | |||
| Подводные инженерные исследования | |||
| Л.: Судостроение, 1984, с.252 и 253. |
