Изобретение относится к способам порционного весового дозирования жидкостей, позволяющим обеспечивать различные технологические процессы в отраслях пищевой, химической и др. промышленности порциями жидкости одинакового веса и частую перенастройку по технологическим требованиям на порции других весов.
Известны автоматические порционные весы и дозаторы, предназначенные для отвешивания жидкостей равными порциями в целях фасовки или дозирования (Викторов В.А. Лункин Б.В. Измерение количества и плотности различных сред. М. Энергия, 1973, с.23-24; П.Профос. Измерения в промышленности. М. Металлургия, 1980, с.311-328).
Эти устройства представляют собой, как правило, равноплечее коромысло, к которому с одной стороны подвешен ковш, а с другой гири. Над ковшом находится бункер, впускное отверстие которого закрывается заслонкой, управляемой весами. Поднимаясь вверх после разгрузки, ковш открывает заслонку и жидкость начинает поступать в него самотеком или с помощью питателей. Когда наполнение ковша заканчивается, заслонка закрывается.
Известные весовые устройства, которые в качестве уравновешивающей силы используют груз известной массы, имеют относительно сложную конструкцию, элементы которой требуют точного изготовления и содержат пружинные элементы, имеющие недостаточную стабильность. Процесс уравновешивания не допускает плавного изменения веса порции, так как изменить вес порции можно только дискретно, путем снятия или добавления гирь.
Техническим решением, выбранным в качестве прототипа, является способ порционного весового дозирования жидкости, при котором с целью повышения точности и надежности сосуд устанавливают в исходное положение, наполняют через открытый вентиль, а затем процесс дозирования прерывают с помощью нажимных коммутационных элементов, суммарное усилие нажатия которых соответствует весу порции жидкости (авт.св. СССР N 1666926А, кл. G 01 F 13/00, 1991).
Однако данный способ, хотя и повышает точность и надежность дозирования вязких жидкостей, но не обеспечивает плавной перенастройки системы на дозирование порций других весов, так как коммутационные элементы имеют жесткую релейную статическую характеристику, и дискретная настройка достигается изменением количества используемых коммутационных элементов. При требующемся большом весе порции необходимо использовать много коммутационных элементов, что усложняет конструкцию и понижает надежность. Кроме того, на практике проявляются недостатки, присущие пружинным элементам.
Целью предложенного способа является повышение эффективности функционирования за счет использования электромагнитной уравновешивающей силы, а также повышение четкости работы за счет частичного погашения силы инерции при движении емкости.
Поставленная цель достигается тем, что в известном способе порционного весового дозирования жидкости, заключающемся в установке емкости в загрузочное положение, открытии вентиля для подачи жидкости, дозировании до заданного веса порции и прекращении дозирования закрытием вентиля с последующим опорожнением емкости, устанавливают регулирующим элементом перед наполнением определенную, в соответствии с градуировочной характеристикой, силу тока в катушке с незамкнутым ферромагнитным сердечником, который жестко закрепляют на неподвижной стойке, а магнитную цепь сердечника в загрузочном положении емкости замыкают ферромагнитным якорем, пpичем якорь жестко закрепляют на шарнирно подвешенной в стойке и уравновешенной противовесом емкости со смещенным центром тяжести относительно оси подвески и наполнение ведут до равенства момента от электромагнитной силы притяжения катушки моменту от опрокидывающей емкость силы тяжести жидкости и емкость опорожняют в процессе ее опрокидывания. Кроме того, создают при повороте емкости дополнительное воздушное демпфирование вогнутой поверхностью противовеса.
Сопоставительный анализ заявленного технического решения с прототипом показывает, что заявляемый способ отличается от известного тем, что уравновешивающее усилие создают за счет электромагнитной силы катушки с замкнутой магнитной цепью, а перенастройку системы осуществляют регулирующим элементом в электрической цепи этой катушки с ферромагнитным сердечником в соответствии с предварительно снятой градуировочной характеристикой. При этом противовес наделяют демпфирующей способностью при поворотах емкости. Эти отличия позволяют сделать вывод о соответствии заявляемого технического решения критерию "новизна".
Признаки, отличающие заявленное техническое решение от прототипа, не выявлены в других технических решениях при изучении данной и смежных областей техники, посвященных взвешиванию, измерению массового расхода и уровня жидкости и, следовательно, обеспечивают заявленному способу соответствие критерию "изобретательский уровень".
Порционное весовое дозирование широко применяется во многих отраслях промышленности, например в пищевой, оно используется при составлении помольных партий на мельницах, смесей для получения шоколадных масс в кондитерском производстве, при внесении муки, соды, соли, сахара и других добавок в производстве хлеба, при фасовке муки, крупы, сахара и других продуктов, а следовательно, заявляемое техническое решение является промышленно применимым.
Осуществляют заявленный способ с помощью устройства, функциональная схема которого представлена на чертеже.
Устройство содержит емкость 1, шарнирно подвешенную на оси 2. Ось закреплена в стойках 3. жестко закрепленных на основании 4. Емкость уравновешена в загрузочном положении на оси противовесом 5. К стенке емкости с внешней стороны прикреплен ферромагнитный якорь 6 в виде металлической пластины соответствующей толщины, закрытой тонкой неферромагнитной прокладкой 7. Последний обеспечивает большую четкость и стабильность момента набора критического веса порций. На одной из стоек закреплена катушка 8 с ферромагнитным сердечником 7 с таким расчетом, чтобы в загрузочном положении емкости магнитная цепь катушки оказывалась бы замкнутой посредством якоря. Электрическая цепь катушки включает в себя регулирующий 11 и измерительный 10 элементы, а также источник 14 электрической энергии.
Поток жидкости (показан двойными стрелками) через вентиль 12 поступает в емкость 1 и перекрывается вентилем по сигналу электрически соединенного с ним датчика 13 набора порции жидкости, который также жестко закреплен на стойке.
При работе устройства емкость 1 сначала находится под действием противовеса 5 в загрузочном положении. При включении устройства магнитная цепь катушки 8 в виде сердечника 9 посредством закрепленного на емкости якоря 6 с прокладкой 7 оказывается замкнутой и катушка развивает определенную, зависящую от положения регулирующего элемента 11, удерживающую электромагнитную силу, пpопорциональную силе тока, протекающего в электрической цепи: источник 14 электрической энергии, катушка 8, регулирующий 11 и измерительный 10 элементы. В этом же положении датчик 13 набора порции, выполненный, например, на основе геркона, своим сигналом открывает вентиль 12. Через последний емкость наполняется жидкостью. Регулирующим элементом 11 устанавливают предварительно необходимую величину тока в цепи, соответствующую весу дозируемой жидкости, и контролируют его величину в соответствии с градуировочной характеристикой по измерительному элементу 10. По мере набора жидкости возрастает соответственно сила тяжести и соответствующий опрокидывающий момент. Как только этот момент станет равным удерживающему электромагнитному моменту, емкость 1 начнет поворачиваться на оси 2, закрепленной в стойках 3 на основании 4. В этот момент датчик 13 срабатывает и своим сигналом закроет вентиль 12, тем самым прерывая поток жидкости в емкость 1. В процессе опрокидывания емкости относительно оси она опорожняется, причем опорожнение емкости заканчивается, когда она повернется до крайнего разгрузочного положения, обозначенного соответствующими упорами (не показаны). После разгрузки под действием противовеса 5 емкость возвращается в загрузочное первоначальное положение, в котором снова, если не было изменено состояние регулирующего элемента 11, восстанавливается удерживающая электромагнитная сила катушки, и процесс далее протекает аналогично описанному выше. Подход емкости к крайним положениям смягчен демпфирующей силой противовеса за счет сопротивления воздуха, что существенно повышает четкость работы устройства.
Получим уравнение статической характеристики устройства, для чего воспользуемся условием, что алгебраическая сумма моментов сил, действующих на емкость, находящуюся в загрузочном положении, должна быть равна нулю:
М1 + М2 М3 М4 0, (1) где М1 m1 x g x l1 момент силы тяжести от дозируемой жидкости,
m1 масса дозируемой жидкости;
g ускорение свободного падения;
l1 расстояние от центра массы жидкости до оси поворота емкости.
М2 m2 x g x l1 момент силы тяжести емкости;
m2 собственная масса емкости;
М3 F x l2 момент электромагнитной силы катушки;
F k1 х I электромагнитная сила катушки, пропорциональная коэффициенту пропорциональности k1, зависящему от числа витков катушки, материала и геометрических размеров сердечника электромагнита, силы тока I, протекающего по катушке;
l2 плечо силы F относительно оси поворота емкости;
M4 m3 x g x l3 момент силы тяжести противовеса;
m3 масса противовеса;
l3 плечо от центра тяжести противовеса до оси поворота емкости. Условие М1 М3 + М4 М2 назовем критическим, так как при его достижении начинается опрокидывание емкости с жидкостью. Так как момент М2, М3, М4 для данной установки-величины постоянные, то для изменения веса порций жидкости необходимо изменять величину М1. Зависимость массы дозируемой жидкости от состояния регулирующего элемента получим, если подставим уравнение в (1) приведенные выше соотношения для каждого момента. Тогда получим:
m1 k1 x I x l2/g x l1 + m3 x l3/l1 m2. (2)
Для конкретной установки g, l1, l2. m2, m3 величины постоянные, l3 величина подстроечная. С учетом I U/R, при постоянном электрическом напряжении U масса дозируемой жидкости m1 зависит от величины сопротивления R, которая однозначно определяется состоянием регулирующего элемента.
Тогда уравнение статической характеристики запишется:
m1 k2/R + m3 x l3/l1 m2 (3) Здесь коэффициент k2k1 x l2 x U/g x l1 (3) можно представить и в виде
m1 k x I + b, где k k1 x l2/g x l1; b m3 x l3/l1 m2 постоянные коэффициенты.
Поэтому полученное уравнение статической характеристики рассматриваемой системы есть уравнение прямой с угловым коэффициентом -k.
Расчетами и экспериментально установлено, что вес дозируемой жидкости в определенном диапазоне линейно зависит от тока, протекающего через катушку. Таким образом, плавное изменение силы тока, протекающего через катушку, в соответствии с предварительно снятой градуировочной характеристикой приводит к пропорциональному изменению электромагнитной силы катушки с замкнутой магнитной цепью и, соответственно, веса порции дозируемой жидкости. Использованиe электромагнитной силы значительно упрощает систему и процесс ее перенастройки, а следовательно, существенно повышает эффективность функционирования.
Ниже приводится конкретный пример осуществления заявляемого способа.
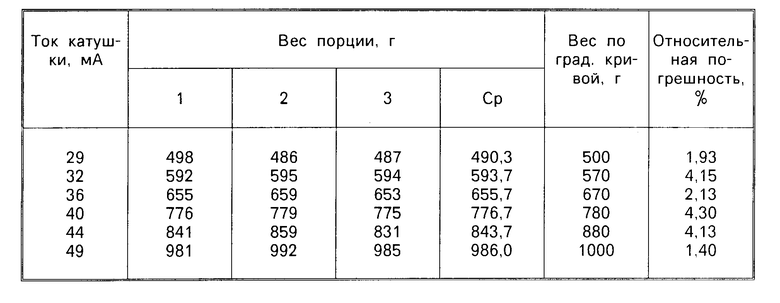
Способ был осуществлен на установке, функциональная схема которой представлена на фиг.1. Емкость выполнена в виде прямоугольного параллелепипеда с наклонной (40о) к основанию передней стенкой, объемом 0,0016 м3 и подвешена шарнирно к оси задней стенкой в ее середине. В верхней части той стенки закреплен якорь с неферромагнитной прокладкой, а в нижней части штырь противовеса. Катушка намотана проводом ПЭВ-2 диаметром 0,10 мм, содержит 11 тыс. витков, сопротивление ее 2,4 кОм. П-образный металлический сердечник катушки был взят сечением 8х15 мм2. Противовес выполнен в виде штыря с резьбой, на котором закреплялась открытая прямоугольная коробка соответствующей массы. В качестве жидкости использовалась вода. Изменение тока, протекающего через катушку, осуществлялось потенциометром сопротивлением 5 кОм. Измерение тока осуществлялось миллиамперметром постоянного тока на 50 мА. Отдозированная порция воды при каждом значении тока взвешивалась в трехкратной повторности на лабораторных весах. Предварительно перед опытами снималась градуировочная характеристика пропорциональная зависимость критической массы, при которой емкость уже не удерживается электромагнитной силой катушки, от тока. Последний изменялся в диапазоне 25-50 мА. Результаты этих измерений сведены в таблицу.
Из таблицы видно, что относительная погрешность дозирования экспериментальной установки не превышает 4,13% Использование заявляемого изобретения позволяет существенно упростить конструкцию и процесс перенастройки системы, сократить время простоя установки и увеличить производительность при малой погрешности дозирования, и тем самым значительно повысить техническую эффективность производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРЦИОННОГО ВЕСОВОГО ДОЗИРОВАНИЯ | 1992 |
|
RU2047848C1 |
| Способ порционного весового дозирования жидкости | 1988 |
|
SU1666926A1 |
| СПОСОБ ПОРЦИОННОГО ВЗВЕШИВАНИЯ СЫПУЧИХ ПРОДУКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369846C1 |
| Способ дозирования вещества и устройство для его осуществления | 1988 |
|
SU1597307A1 |
| Весовой дозатор | 1991 |
|
SU1793258A1 |
| Дозатор жидкости | 1983 |
|
SU1103078A1 |
| Способ выдачи и дозирования сыпучего мелкодисперсного ферромагнитного материала и устройство для его осуществления | 1979 |
|
SU938024A1 |
| Автоматический дозатор кормов | 1990 |
|
SU1803008A1 |
| Автоматический весовой порционный дозатор с цифровым управлением | 1981 |
|
SU1000773A1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ДОЗИРОВАНИЯ ЖИДКОСТЕЙ НА БАЗЕ МЕМБРАННОГО НАСОСА | 2016 |
|
RU2628984C1 |
Использование: способ относится к весоизмерительной технике, а именно к автоматическому порционному весовому дозированию жидкости при проведении технологических процессов во многих отраслях пищевой, химической и др. промышленности, требующих порций жидких продуктов одинакового веса и частой перенастройки на порции других весов. Сущность изобретения: цель изобретения
повышение эффективности функционирования за счет использования электромагнитной уравновешивающей силы, а также повышение четкости работы за счет частичного погашения силы инерции при движении емкости. Способ порционного весового дозирования жидкости осуществляют путем установки емкости 1 в загрузочное положение, открытием вентиля 12 наполнения емкости порцией заданного веса, закрытием вентиля прекращения наполнения с последующим опорожнением емкости. При этом подвешенную на шарнирно закрепленной оси 2 емкость со смещенным в сторону опрокидывания центром тяжести каждый раз возвращают в загрузочное положение противовесом 5, устанавливают регулирующим элементом 11 перед наполнением в соответствии с предварительно полученной градуированной характеристикой силу тока в неподвижной катуке 8 с незамкнутым ферромагнитным сердечником 9. Магнитную цепь сердечника катушки в этом положении замыкают ферромагнитным якорем 6, жестко закрепленным на внешней поверхности емкости, и наполнение ведут до равенства момента от электромагнитной силы притяжения катушки с замкнутой магнитной цепью моменту от опрокидывающей силы тяжести наполненной емкости и емкость в процессе опрокидывания опорожняют. Кроме того, противовес наделяют демпфирующей способностью при движении емкости. 1 з.п. ф-лы, 1 ил. 1 табл.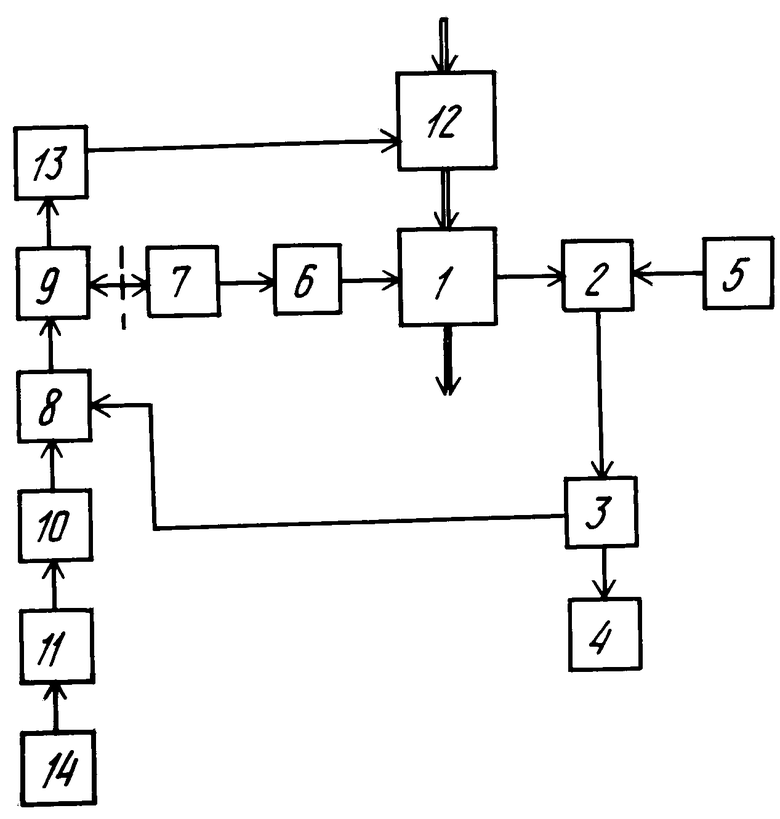
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ порционного весового дозирования жидкости | 1988 |
|
SU1666926A1 |
