Изобретение относится к весоизмерительной технике, а именно к автоматическому порционному весовому дозированию различных веществ, позволяющему обеспечивать различные технологические процессы порциями жидких разной консистенции и сыпучих веществ одинакового веса и частую перенастройку по технологическому требованию на порции других весов.
Известны автоматические порционные весы и дозаторы, предназначенные для отвешивания жидкостей равными порциями в целях фасовки или дозирования [1]
Соответствующие устройства представляют собой, как правило, равноплечее коромысло, к которому с одной стороны подвешен ковш, а с другой гири. Над ковшом находится бункер, впускное отверстие которого закрывается заслонкой, управляемой весами. Поднимаясь вверх после разгрузки, ковш открывает заслонку и вещество начинает поступать в него самотеком или с помощью питателей. Когда наполнение ковша заканчивается, заслонка закрывается.
Известные весовые устройства, которые в качестве уравновешивающей силы используют груз известной массы, имеют относительно низкую техническую эффективность, вследствие неуниверсальности из-за невозможности дозирования как жидких, так и сыпучих веществ. Причем, процесс уравновешивания очень инерционен и не допускает плавного изменения веса порции, так как изменить вес порции можно только дискретно, путем снятия или добавления гирь.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ порционного весового дозирования жидкости, при котором с целью повышения точности и надежности, сосуд устанавливают в исходное положение, наполняют через открытый вентиль и процесс дозирования прерывают с помощью нажимных, коммутационных элементов, суммарное усилие нажатия которых соответствует весу порции жидкости [2]
Однако, данный способ хотя и повышает точность и надежность дозироавния вязких жидкостей, но не обеспечивает дозирование порций как жидких, так и сыпучих веществ различного веса, так как коммутационные элементы имеют жесткую релейную статическую характеристику и дискретная настройка достигается изменением количества используемых коммутационных элементов.
Целью предложенного способа является повышение эффективности функционирования за счет достижения универсальности в дозировании как жидких, так и сыпучих веществ, а также повышение четкости работы за счет погашения силы инерции.
Поставленная цель достигается тем, что в известном способе порционного весового дозирования, заключающемся в установке емкости в загрузочное положение, открытии клапана, загрузке до заданного веса, прекращении загрузки закрытием клапана и опорожнении емкости, закрепляют емкости попарно симметрично на шарнирно подвешенной в боковых стойках оси с таким расчетом, чтобы они в загрузочном положении уравновешивали друг друга, устанавливают регулирующим элементом перед загрузкой определенную в соответствии с предварительно снятой градуировочной характеристикой силу тока в неподвижной катушке с незамкнутым ферромагнитным сердечником, а магнитную цепь катушки в загрузочном положении замыкают ферромагнитным якорем, закрепленным на наружной поверхности каждой емкости, причем загрузку каждой емкости прекращают при превышении моментом силы тяжести загружаемой емкости момента от удерживающей электромагнитной силы катушки с замкнутой магнитной цепью, и процесс опорожнения начинают при повороте загруженной емкости до нижнего положения и заканчивают при ее симметрично перевернутом положении. Кроме того, устанавливают в промежуточном положении демпфер, например механический, который импульсно взаимодействует с поверхностью поворачивающейся емкости, погашая частично силу инерции.
Сопоставительный анализ предлагаемого технического решения с прототипом показывает, что предлагаемый способ отличается от известного тем, что в качестве уравновешивающей силы используют электромагнитную силу, развиваемую катушкой с замкнутой магнитной цепью, перенастройку системы ведут регулирующим элементом в электрической цепи катушки, что позволяет получить любую дробную величину веса порции, уравновешивают емкость в загрузочном положении такой же емкостью, находящейся в симметрично перевернутом положении, причем количество емкостей парное и существенно большее, а процесс опорожнения начинают при повороте загруженной емкости и заканчивают при ее перевернутом положении. Эти отличия позволяют сделать вывод о соответствии предлагаемого технического решения критерию "новизна".
Признаки, отличающие предлагаемое техническое решение от прототипа, не выявлены в других технических решениях при изучении данной и смежных областей техники, связанных с завешиванием, измерением массового расхода веществ и, следовательно, обеспечивают предлагаемому способу соответствие критерию "изобретательский уровень".
Порционное весовое дозирование широко применяется во всех отраслях пищевой, химической, местной промыш- ленности, например в первой, при составлении помольных партий на мельницах, смесей шоколадных масс в кондитерском производстве, при внесении муки, воды, соли, сахара и др. добавок в производстве хлеба, при смешивании различных компонентов в производстве комбикормов, при выпуске фасованных пачек продуктов, а следовательно, предлагаемое техническое решение является промышленно приме- нимым.
Осуществление предлагаемого способа поясняется с помощью устройства, функциональная схема которого представлена на чертеже.
Устройство содержит ось 1, шарнирно закрепленную в боковых стойках (не показаны). К оси жестко прикреплены посредством тяг емкости 2,3,4 и 5 (на чертеже показан вариант с двумя парами емкостей). Каждая емкость с внешней стороны снабжена жестко прикрепленными ферромагнитными якорями 6,7,8 и 9, выполненными в виде металлических пластин, соответствующей толщины. Емкость 2 находится в загрузочном положении. В нее через вентиль 10 поступает поток вещества (на чертеже показан двойными стрелками) из резервуара 11. На одной из стоек закреплена неподвижная катушка 12 с сердечником 13 и датчиком 14 набора веса порции с таким расчетом, чтобы в загрузочном положении любой из емкостей магнитная цепь катушки оказывалась бы замкнутой. В электрическую цепь катушки входит источник энергии 15, регулирующий 16 и измерительный 17 элементы. Кроме того, датчик 14 электрически соединен с вентилем 10, а демпфер 18 импульсно взаимодействует с поворачивающейся емкостью 5.
Устройство для реализации предлагаемого способа порционного весового дозирования работает следующим образом.
Одна из емкостей, например емкость 2 на чертеже, сначала расположена в загрузочном положении и вес ее уравновешен расположенной симметрично относительно оси 1 перевернутой емкостью 4, а сердечник 13 катушки 12 замкнут посредством якоря 7, закрепленного на наружной поверхности емкости 3 и в электрической цепи катушки, состоящей из источника 15, регулирующего 16 и измерительного 17 элементов, протекает ток, величина которого выставляется регулирующим элементом 16 с контролем по измерительному элементу 17, в соответствии с предварительно снятой градуировочной характеристикой зависимости массы порции от тока, протекающего в электрической цепи катушки. Одновременно якорь 7 в описываемом положении воздействует на датчик 17, который своим сигналом открывает вентиль 10. В результате поток вещества из резервуара 11 поступает через открытый вентиль в емкость 2 и последняя начинает загружаться. По мере загрузки емкости 2 возрастает соответствующая сила тяжести и момент ее и как только этот момент превысит удерживающий эту емкость в загрузочном положении электромагнитный момент, развиваемый катушкой 12 с замкнутой магнитной цепью, емкость 2 начинает поворачиваться вокруг оси 1, что означает, что вес порции набран. По мере поворота загруженной емкости повышается под действием силы инерции ее скорость поворота вокруг оси 1 и одновременно начинается процесс опорожнения ее. В промежуточном положении скорость поворота емкости частично погашается за счет импульсного взаимодействия с демпфером 18, и следующая емкость 3 к загрузочному положению подойдет плавно и далее остановится под действием электромагнитной силы катушки. Следует отметить, что как только загруженная емкость 2 начала движение, якорь 7 воздействует на датчик 17 набора порции и последний своим сигналом закрывает вентиль 10, перекрывая тем самым поток вещества из резервуара 11 до установки следующей емкости 3 в загрузочное положение, якорь которой, воздействуя на датчик 14, снова открывает вентиль 10, возобновляя поток вещества из резервуара 11, но уже в емкость 3. Поcле загрузки емкоcти 3 она также поворачивается вокруг оси 1 аналогично описанному выше процессу, а емкость 2 поворачивается до симметрично перевернутого положения, при котором противоположная емкость 4 встанет в загрузочное положение, окончательно освобождается от любого вещества и процесс далее для каждой следующей емкости 3,4 и 5 протекает идентично описанному, а потом цикл повторяется вновь.
Выведем уравнение статической характеристики системы, для чего воспользуемся условием, что алгебраическая сумма моментов сил, действующих на емкость, находящуюся в загрузочном положении, должна быть равна нулю
М1 + Мl1 М2 М3 + М4 М5 0, (1) где М1 ml x g x l1 момент силы тяжести загружаемого продукта;
m1 масса загружаемого продукта;
g ускорение свободного падения;
l1 расстояние от центра массы продукта до оси поворота емкости;
Мl1 m11 x g x l1 момент силы тяжести незагруженной емкости;
m2 собственная масса емкости; Плечо l1 предполагаем остается тем же.
М2 F x l2 момент электромагнитной силы катушки с замкнутой магнитной цепью;
F k1 x I электромагнитная сила катушки, пропорциональная силе тока 1, протекающего по соответствующей электрической цепи; к1 коэф. пропорциональности, зависящий от числа витков катушки, материала и геометрических размеров сердечника электромагнита;
l2 плечо силы F относительно оси поворота емкости;
М3 m3 x g x l3 момент силы тяжести противоположной симметрично перевернутой емкости; m3 масса этой емкости; l3 плечо от центра тяжести уравновешивающей емкости до оси поворота. М4=М5=0 моменты силы тяжести другой пары емкостей. Они равны нулю, поскольку их плечи при нахождении в загрузочном положении любой емкости другой пары равны нулю. Условие М1 + Мl1 М2 + М3 назовем критическим, так как при его достижении начинается поворот емкости с продуктом. Момент Мl1, М3 для данной установки величины постоянные и для изменения веса порции жидкости необходимо изменять величину М2. Зависимость массы дозируемого продукта от состояния регулирующего элемента получим, если подставим в (1) приведенные выше соотношения для каждого момента. Тогда получим m1 k1 x I х l2/g x l1 + m3 x l3/l1 m11 (2) Для конкретной установки l1= l3, m11 m3 величины постоянные. С учетом I U/R, при постоянном электрическом напряжении U масса дозируемого продукта m1 зависит от величины сопротивления R, которая однозначно определяется состоянием регулирующего элемента.
Тогда, уравнение статической характеристики запишется
m1 k2/R, (3) где k2 k1 x l2 U/g x l1, тогда (3) можно представить и в виде
m1 k x I, (4) где k k1 x l2/g x l1
Поэтому полученное уравнение статической характеристики рассматриваемой системы есть уравнение прямой с угловым коэффициентом к.
Экспериментально также установлено, что вес дозируемого продукта в определенном диапазоне пропорционален величине тока, протекающего через катушку. Таким образом, любое изменение силы тока, протекающего через катушку, в соответствии с предварительно снятой градуировочной характеристикой, приводит к пропорциональному изменению электромагнитной силы катушки с замкнутой магнитной цепью и соответственно веса порции дозируемого продукта. Использование электромагнитной силы значительно упрощает систему и процесс ее перенастройки, а следовательно, существенно повышает эффективность функционирования.
Роторное расположение емкостей в описываемой системе позволяет вести опорожнение каждой делительно за несколько тактов, а следовательно успешно освободиться от любого вещества, будь оно жидким, сыпучим или пластическим, не говоря уж о штучных или кусковых веществах.
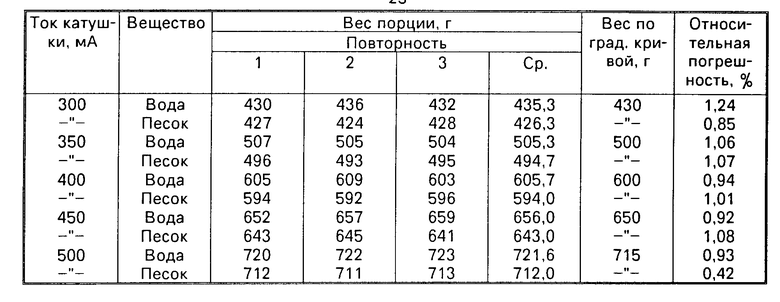
П р и м е р. Способ осуществлен на установке, функциональная схема которой представлена на чертеже. Каждая из 4-х емкостей, объемом 0,004 м3, выполнена в виде ковшей промышленной нормы. Они жестко прикреплены к кронштейнам длиной по 150 мм, которые вторыми концами в свою очередь жестко прикреплены к наружной обойме, шарнирно закрепленной (шарикоподшипники) на оси. Ось жестко закреплена в двух боковых уголковых стойках. На боковой поверхности каждой емкости жестко закреплены якоря, выполненные в виде набора ферромагнитных пластин общей толщиной 8 мм, соответствующей толщине сердечника катушки. На расстоянии 150 мм от 1-ой пары боковых стоек предусмотрена 2-ая пара боковых стоек, на которой укреплен резервуар, выполненный в виде цилиндра высотой и диаметром 0,3 м с нижним конусом, заканчивающимся выпускным отверстием диаметром 20 мм. Полный объем резервуара составил 0,024 м3. На боковой стойке 1-ой пары закреплена катушка, содержащая 11 тыс. витков провода ПЭВ-2 диаметром 0,10 мм, сопротивление последней 2,4 кОм. Ферромагнитный из электротехнической стали сердечник катушки выполнен П-образной формы с возможностью замыкания магнитной цепи любым якорем каждой емкости. Рядом с катушкой установлен геркон, на состояние контакта которого также влияет положение якоря емкости. При замыкании контакта (емкость в загрузочном положении) геркона образуется электрическая цепь, и ток, протекающий по ней, открывает электромагнитный клапан, расположенный между выпускным отверстием резервуара и емкостью, находящейся в загрузочном положении. Открытие клапана вызывает прохождение потока продукта из резервуара в емкость. В качестве дозируемых продуктов использовались вода и песок. Измерение тока, протекающего через катушку, осуществлялось регулирующим элементом в виде потенциометра сопро- тивлением 68 кОм. Измерение тока проводилось миллиамперметром постоянного тока на 500 мА. Отдозированная порция продукта при каждом значении тока взвешивалась в 3-х кратной повторности на лабораторных весах. Предварительно перед опытами снималась градуировочная характеристика пропорциональная зависимость критической массы, при которой емкость уже не удерживается электромагнитной силой катушки от тока. Последний изменялся в диапазоне 300-500 мА. Результаты этих измерений сведены в таблицу.
Из таблицы видно, что относительная погрешность дозирования экспериментальной установки не превышает 1,24% Использование предлагаемого изобретения позволяет существенно сократить номенклатуру порционных весовых дозаторов, так как для жидких продуктов различной консистенции и сыпучих веществ можно использовать одну и ту же систему. Одновременно упрощается и процесс перенастройки системы, сокращается время простоя и повышается производительность при малой погрешности дозирования. В результате отмеченных достоинств предложенного способа порционного весового дозирования значительно повышается техническая эффективность производства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРЦИОННОГО ВЕСОВОГО ДОЗИРОВАНИЯ ЖИДКОСТИ | 1992 |
|
RU2042930C1 |
| СПОСОБ ПОРЦИОННОГО ВЗВЕШИВАНИЯ СЫПУЧИХ ПРОДУКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369846C1 |
| Способ весового порционного дозиро-ВАНия КуСКОВыХ МАТЕРиАлОВ | 1979 |
|
SU807067A1 |
| Способ дозирования вещества и устройство для его осуществления | 1988 |
|
SU1597307A1 |
| Автоматический дозатор кормов | 1990 |
|
SU1803008A1 |
| Устройство для автоматического взве-шиВАНия и пОРциОННОгО дОзиРОВАНия | 1979 |
|
SU807068A1 |
| Весовой дозатор | 1985 |
|
SU1270578A2 |
| СТАТОР ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПОСТОЯННЫМИ МАГНИТАМИ | 1993 |
|
RU2061990C1 |
| ВЕСОВОЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР ГРЕНЫ | 1969 |
|
SU236893A1 |
| Устройство для порционного взвешивания ферромагнитных предметов | 1981 |
|
SU972244A1 |
Изобретение относится к весоизмерительной технике, а именно к автоматическому порционному весовому дозированию различных по консистенции продуктов в различных отраслях промышленности. Цель изобретения повышение эффективности функционирования за счет достижения универсальности в дозировании продуктов различной консистенции, а также повышение четкости работы за счет частичного погашения силы инерции, возникающей при повороте загруженной емкости. Сущность изобретения: способ осуществляют путем поочередной установки каждой емкости 2-5 в загрузочное положение, открытия клапана, загрузки до заданного веса порции, прекращения загрузки закрытием клапана с последующим опорожнением емкости. Новым в способе является то, что закрепляют идентичные емкости попарно симметрично на шарнирно подвешенной в стойках оси 1, на боковой поверхности каждой емкости с внешней стороны закрепляют катушку 12 с незамкнутым ферромагнитным сердечником 13, причем, в загрузочном положении замыкают посредством якоря 6-9 магнитную цепь катушки 12 и устанавливают регулирующим элементом 16 определенную силу тока, и загрузку прерывают при превышении моментом от силы тяжести загруженной емкости момента от удерживающей емкость электромагнитной силы катушки с замкнутой магнитной цепью, а процесс опорожнения начинают с момента поворота загруженной емкости и заканчивают при ее симметрично перевернутом положении. 1 з. п. ф-лы, 1 ил. 1 табл.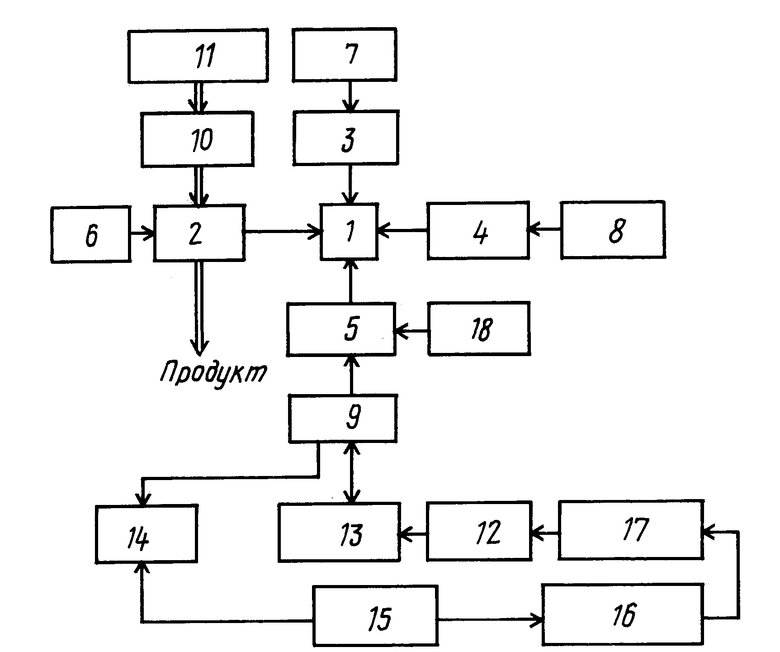
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ порционного весового дозирования жидкости | 1988 |
|
SU1666926A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
