16
Фи&1
Изобретение относится к технике дози- рования в сельском хозяйстве и может быть использовано для индивидуального автоматического порционного кормления молочных коров вне доильного зала.
Цель изобретения - повышение точности дозирования для кормов смешанных фракций путем поэтапной загрузки и применения системы успокоителя.
Для достижения этой цели загрузка весов осуществляется в два этапа. На первом этапе дозирования питатель-вибратор работает с частотой (р , обеспечивающей его максимальную производительность. В таком режиме работы на весы воздействуют максимальные динамические нагрузки, приводящие к возникновению больших погрешностей. Для гашения этих нагрузок дополнительно устанавливается успокоитель, обеспечивающий их гашение. На частоте 1 загружается часть корма, равная примерно 90% от дозы в 100 г. Затем автоматически осуществляется переключение питателя-вибратора на частоту (pi, обеспечивающую максимальную точность дозирования. Скорость загрузки при этом уменьшается, уменьшаются и динамические нагрузки, которые гасятся также и с помощью успокоителя, что приводит к уменьшению погрешности. Общее время дозирования при этом также уменьшается за счет сокращения времени загрузки на первом этапе дозирования.
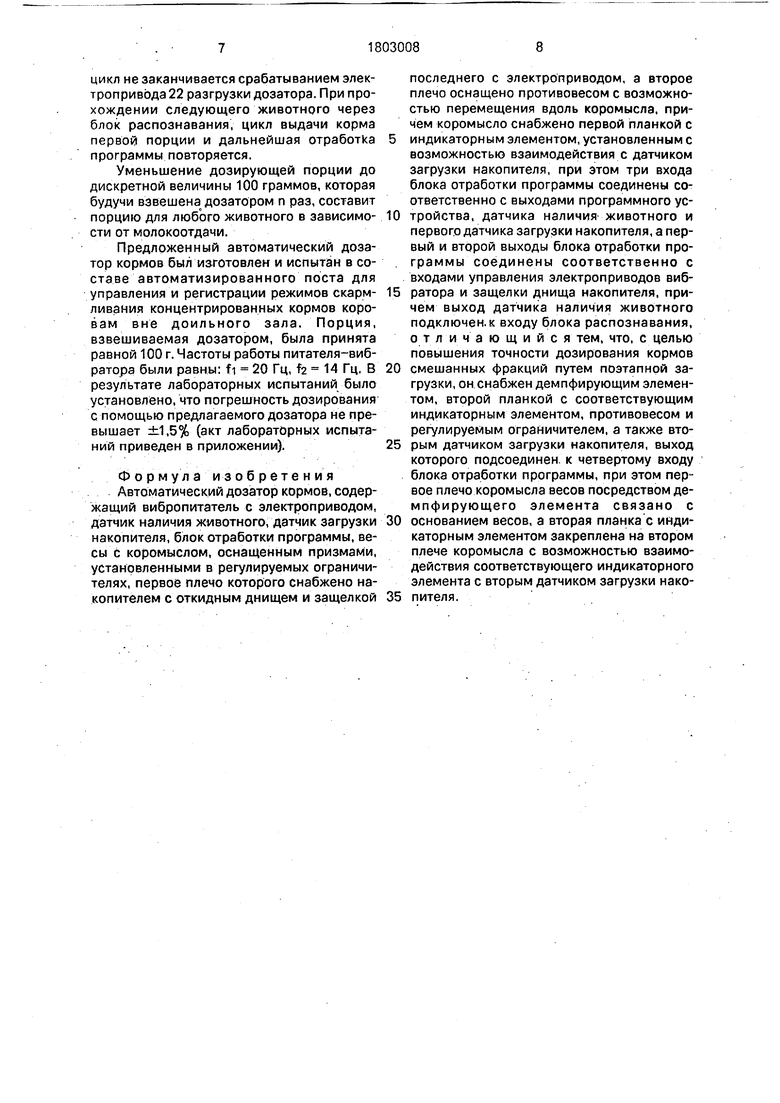
На фиг.1 изображена схема дозатора; на фиг.2 - вид дозатора сбоку; на фиг.З - система управления работой дозатора кормов; на фиг.4 - блок-схема управления дозатором с расшифровкой строения блока отработки программы; на фиг.5 - электрическая схема датчика загрузки накопителя; на фиг.б - схема успокоителя.
Автоматический дозатор кормов содержит вибрационный питатель 1, жестко .связанный с вибрационной катушкой 17, установленной между бункером-накопителем и весами, весы с коромыслом 2 опирающимся на качающиеся призмы 3 опорной стойки 4, к одному плечу которого шарнирно прикреплены: цельный накопитель 5 с откидным днищем 6, качающимся на оси и механической защелкой 7, прикрепленной к стенке накопителя 5, обращенной к питателю, а также шток успокоителя 8. а к другому
- противовес в виде регулируемой гайки 9, перемещающейся вдоль коромысла, планку 11с фольгирраанной меткой, шарнирно закрепленную на конце плеча коромысла так, чтобы при колебании коромысла она свободно перемещалась в датчике 13, и планку
10 с фольгированной меткой с противове- . сом 14 на одном конце и регулируемым упорным ограничителем 15 на другом,свободно перемещающуюся в датчике 12 и связанную с плечом коромысла посредством регулируемого упорного ограничителя. Электромагнит разгрузки, прикрепленный к основанию питателя таким образом, чтобы при срабатывании якорь электромагнита от0 крывал защелку 7, наклонный желоб 10 перемещения корма из накопителя 5 в кормушку 16, расположенный между накопителем и кормушкой. Система управления содержит блок распознавания номера жи5 вотного 11, вход которого соединен с выходом датчика наличия животного 21, а выход со входом программного устройства 19, для задания количества выдаваемого корма, выход которого соединен с одним из входов
0 блока отработки программы 20, ко второму и третьему входам которого подсоединены выходы датчиков 12 и 13, а к выходам подсоединены электромагниты разгрузки 22 и вибропитателя 23.
5 в качестве программного устройства 19 используется постоянное запоминающее устройство, например, типа К573РФ2.
На адресный вход ПЗУ от блока распознавания поступает номер животного. Со0 гласно этого номера из соответствующей ячейки памяти ПЗУ на информационном входе появляется предварительно записанная в данную ячейку информация о количестве корма, который необходимо выдать
5 животному с этим номером. Данная информация поступает в блок 20 отработки программы. На входы блоков 18 и 19, соответственно, распознавания и отработки программы подается информация с выхо0 дов датчика 21 наличия животного.
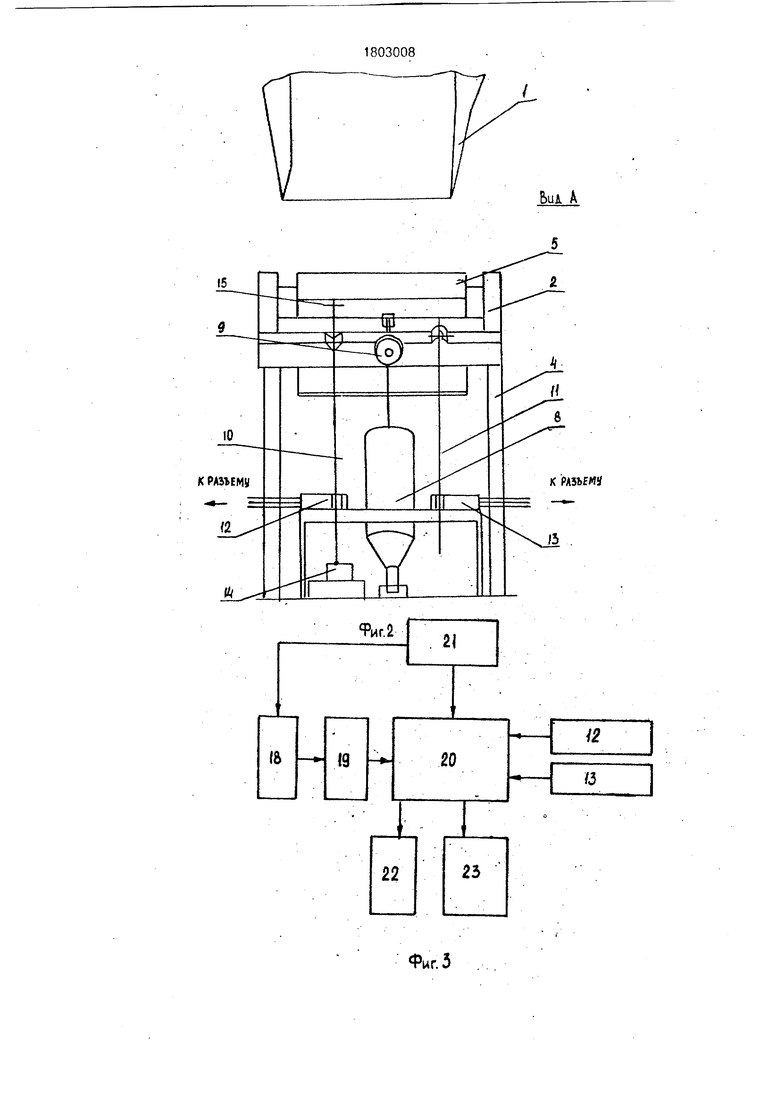
На фиг.4 приведена часть блок-схемы управления дозатором с расшифровкой строения блока 20 отработки программы. Он содержит программное устройство 19,
5 электропривод 22 разгрузки, датчики загрузки накопителя 12 и 13, электропривод 23 вибррпитателя. Блок отработки программы содержит генераторы низкой частоты 1 и 4, выходы которых соединены с первыми
0 входами ключей 2 и 5, первый датчик загрузки 12, выход которого подсоединен ко второму входу ключа 5 и через инвертор 3 ко второму входу ключа 2, схему И 6, первый и второй вход которой соединены с выходами
5 ключей 2 и 5, а выход со входом электромагнита вибропитателя 23, второй датчик загрузки 13, выход которого соединен с . первым входом схемы И 8 и через инвертор 7 с третьим входом схемы И 6, инвертор 11, вход которого соединен с выходом датчика
наличия животного 21, а выход соединен со вторым входом схемы И 8, выход которого связан с входом ждущего мультивибратора 9, а выход ждущего мультивибратора 9 соединен с первым входом ключа 10, второй вход ключа 10 соединен с выходом схемы сравнения 14, а выход ключа 10 соединен со входом электромагнита разгрузки 22 и входом счетчика 15, выход которого соединен с первым входом схемы сравнения 14, второй вход схемы сравнения 14 соединен с выходом программного устройства 19.
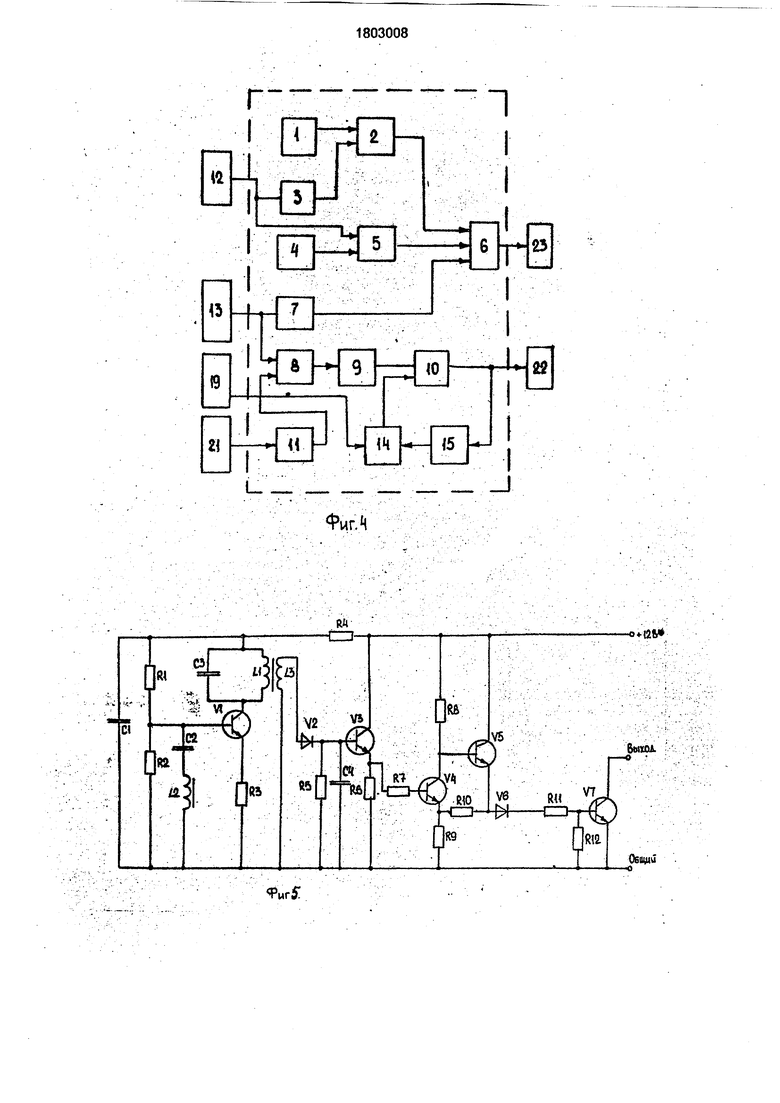
На фиг. 5 представлена электрическая схема датчика 12 и 13 загрузки накопителя, Датчик типа ПИЩ - серийно выпускаемый датчик. На транзисторе V1 собран генератор синусоидальных колебаний. Если между катушками L1 и L2 нет металлической пластины, то колебания, создаваемые в контуре L103, наводятся в катушке L3 и выпрямля- ются диодом V2. Открываются транзисторы V3 и V4, закрываются транзисторы V5 и V7. На выходе датчика сигнал единицы. При попадании между катушками V1 и V3 металлической пластины связь между ними нарушается, и в катушке L3 колебаний не наводится. Транзисторы V3 и V4 закрываются, а транзисторы V4 и V7 открываются. На выходе датчика сигнал нуля. Конструктивно датчик выполнен таким образом, что между катушками VI и V3 имеется прорезь, в которой может перемещаться пластина.
В качестве датчика 21 может быть использован, например, гермокон, который срабатывает от взаимодействия с магнитом, расположенным на ошейнике животного.; :.. В цилиндрическом корпусе 1, наполненном жидкостью 2, перемещается штокЗ в направляющей крышке 4. На одном конце штока укреплен поршень 5 с капиллярными отверстиями 6. На другом конце штока и нижнем конце корпуса укреплены серьги 7 и 8 для крепления соответственно к плечу коромысла и к основанию весового механизма.
Дозатор работает следующим образом. При движении животного через блок распознавания 18, считывается его номер с передачей сигнала на программное устройство 19, в котором записана норма корма для каждого животного. Запрограммиро- ванное число импульсов или циклов дозирования отрабатывается блоком 20 отработки программы. Контроль за отработкой программы автоматически осуществляется датчиком 21 наличия животного у кормушки. Одновременно со срабатыванием датчика 21 наличия срабатывает электропривод 22 разгрузки дозатора (фиг. 1), освобождая днище 6 накопителя 5 от электромеханической защелки 7, В результате предварительно взвешенная доза корма, либо оставшаяся несъеденной предыдущим животным, выгружается по наклонному желобу 17 в кормушку 16, После ссыпания корма электропривод 22 обесточивается, днище накопителя возвращается в исходное положение и фиксируется электромеханической защелкой 7 вследствие инерционной силы противовеса 24. После разгрузки накопителя ко ромысло 2 весового механизма с помощью успокоителя 8 плавно возвращается в первоначальное положение под действием противовеса 9, а фольгированные метки планок Юи.11, находившиеся при разгрузке над датчиком 12 и 13 соответственно, опускаясь, входят в зазоры датчиков, причем дополнительный противовес 14, укрепленный на нижнем конце планки 10, опускается до касания с основанием весового механизма. Возврат весового механизма в исходное положение, вызывает на выходе датчика 13 появление логической единицы, что характеризует начало работы вибрационной катушки 23 питателя на максимально производительной частоте f|. Успокоитель 8 гасит динамические удары крупных частиц корма и предохраняет весы от резких динамических колебаний. Когда вес загруженного корма достигнет равенства с весом противовеса 9, коромысло начнет занимать горизонтальное положение до упора в ограничитель 15 планки 10, находившейся в состоянии покоя во время дозмрования на максимально производительной частоте. В этом положении коромысло будет удерживаться ограничителем 15 и противовесом 14 планки 10. Планка 11, шарнирно связанная с коромыслом, поднимается, и в момент выхода фольгированной метки из датчика 13 (совпадает с моментом упора коромысла в ограничитель 15) происходит переключение на малопроизводительную частоту f2.
Первый этап загрузки закончен, при этом в накопитель загружено 90% веса дозы корма. Когда при работе питателя на малопроизводительной частоте fe вес загруженного корма достигнет равенства с весом противовеса 14, коромысло начнет склоняться в сторону желоба. При этом планка 10 вместе с противовесом 14, сцепленная с коромыслом, начинает подниматься и, в момент выхода фольгированной метки из датчика 12, прекращается работа питателя. Коромысло склоняется в сторону питателя к наклонному желобу 17 и по окончании паузы включается электропривод 22 разгрузки, происходит разгрузка дозатора.
Число циклов дозирования зависит от Заданной программы. Притом последний
цикл не заканчивается срабатыванием электропривода 22 разгрузки дозатора. При прохождении следующего животного через блок распознавания, цикл выдачи корма первой порции и дальнейшая отработка программы повторяется.
Уменьшение дозирующей порции до дискретной величины 100 граммов, которая будучи взвешена дозатором п раз, составит порцию для любого животного в зависимости от молокоотдачи.
Предложенный автоматический дозатор кормов был изготовлен и испытан в составе автоматизированного поста для управления и регистрации режимов скармливания концентрированных кормов коровам вне доильного зала. Порция, взвешиваемая дозатором, была принята равной 100 г. Частоты работы питателя-вибратора были равны: fi 20 Гц, fa 14 Гц. В результате лабораторных испытаний было установлено, что погрешность дозирования с помощью предлагаемого дозатора не превышает ±1,5% (акт лабораторных испытаний приведен в приложении).
Формула изобретения Автоматический дозатор кормов, содержащий вибропитатель с электроприводом, датчик наличия животного, датчик загрузки накопителя, блок отработки программы, весы с коромыслом, оснащенным призмами, установленными в регулируемых ограничителях, первое плечо которого снабжено накопителем с откидным днищем и защелкой
последнего с электроприводом, а второе плечо оснащено противовесом с возможностью перемещения вдоль коромысла, причем коромысло снабжено первой планкой с
индикаторным элементом, установленным с возможностью взаимодействия с датчиком загрузки накопителя, при этом три входа блока отработки программы соединены соответственно с выходами программного устройства, датчика наличия животного и первого датчика загрузки накопителя, а первый и второй выходы блока отработки про- граммы соединены соответственно с входами управления электроприводов вибратора и защелки днища накопителя, причем выход датчика наличия животного подключен.к входу блока распознавания, отличающийся тем, что, с целью повышения точности дозирования кормов
смешанных фракций путем поэтапной загрузки, он снабжен демпфирующим элементом, второй планкой с соответствующим индикаторным элементом, противовесом и регулируемым ограничителем, а также вторым датчиком загрузки накопителя, выход которого подсоединен, к четвертому входу блока отработки программы, при этом первое плечо коромысла весов посредством демпфирующего элемента связано с
основанием весов, а вторая планка с индикаторным элементом закреплена на втором плече коромысла с возможностью взаимодействия соответствующего индикаторного элемента с вторым датчиком загрузки накопителя.
1ft
19
20

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический дозатор кормов | 1988 |
|
SU1644845A1 |
| Устройство для дозированного кормления животных | 1986 |
|
SU1442150A1 |
| Автоматический дозатор кормов | 1981 |
|
SU961615A1 |
| Автоматический дозатор кормов | 1979 |
|
SU793515A1 |
| Устройство для автоматической раздачи корма | 1980 |
|
SU897187A1 |
| Способ раздачи кормов в устройство для его осуществления | 1986 |
|
SU1496730A1 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ МНОГОКОМПОНЕНТНЫХ СМЕСЕЙ | 2012 |
|
RU2494658C1 |
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| Устройство для дозирования порошкообразных проб при спектральном анализе | 1986 |
|
SU1392383A1 |

Изобретение относится к технике дози- рования в сельском хозяйстве и может быть использовано для индивидуального автоматического порционного кормления молочных коров вне доильного зала. Цель изобретения - повышение точности дозирования для кормов смешанных фракций путем поэтапной загрузки. Устройство содержит вибрационный питатель 1, весы с коромыслом 2, накопитель 5, кормушку 16. При движении животного происходит считывание его номера. Программное устройство выдает требуемую порцию с учетом остатка кормов от предыдущего животного. После разгрузки накопителя 5 дозатор готов для обслуживания следующего животного. 6 ил.
22
23
Фиг. 3
Г
L.
%r;4
|
J
| Автоматический дозатор кормов | 1988 |
|
SU1644845A1 |
