Изобретение относится к машиностроению и предназначено для перемещения транспортных средств.
Известны движители инерционно-импульсного действия, способные, преобразуя энергию двигателя, создавать тягу и перемещать транспортные средства без помощи традиционных движителей: колес, гусениц, винтов, пропеллеров и т. п. /см. патент США N 3807244 по кл. F 03 H 5/00 от 1974 г., патенты РФ N 2003564 и 2051832 МКИ B 62 D 57/00 от 1990 г., патент Великобритании N 2111654 по кл. F 03 G 3/00/. Устройство по патенту Великобритании N 2111654, где на валу шарнирно закреплены прямые рычаги с массами с возможностью осуществлять наряду с круговым вращением масс и осевые движения и за счет этого создавать тягу вдоль вала, можно принять в качестве прототипа. Однако в данном патенте выражена сама идея и указаны отдельные признаки, но как это осуществлять - неизвестно. Поэтому действие этого устройства подробно в описании не рассматривается.
Движители инерционно-импульсного действия создают тягу в результате взаимодействия тел внутри самого устройства.
Колеса, гусеницы, лыжи могут устанавливаться на машинах с этими движителями с целью уменьшения потерь тяги при преодолении ими сил трения об опорную поверхность и улучшения их маневренности.
Общими признаками движителей являются: наличие вала по центру корпуса, ступиц на валах, к которым крепятся рычаги или в которых размещаются стержни с возможностью их свободного радиального движения; рабочих масс на концах рычагов или стержней. На пути кругового движения масс в передней части корпуса установлены дуговые отражатели. Начало дуги, как правило, размещается от вала на расстоянии длины вытянутого до упора в ступице стержня или рычага, а конец - вблизи вала. Для уменьшения трения при движении масс по отражателям стержни /рычаги/ имеют средства качения. Вращение рычагов /стержней/ происходит в плоскости, перпендикулярной к оси вращения. Рабочие массы при вращении под влиянием центробежных сил стремятся двигаться от оси вращения на максимально возможном удалении. Величина центробежной силы масс при этом может достигнуть значительных размеров. Она определяется по известной формуле Fц = m(2π•n)2•R /где Fц - сила в кгс; m - масса в кг; π = 3,14; n - число оборотов в сек; R - радиус в метрах/.
Инерционные массы не имеют жесткой связи с валом. Свое круговое движение они могут совершать от вала на расстоянии полной длины рычага /стержня/ или оказаться вблизи ступицы. Дуговые отражатели на корпусе установлены неподвижно. Вместе с корпусом они могут с целью изменения направления тяги совершать повороты вокруг вала в ту или иную сторону до 180o. В процессе кругового движения рабочие массы в передней части окружности, имея максимальный радиус и наибольшую линейную скорость движения, набегают на отражатели и всей своей силой отталкивают их от себя, а вместе с ними корпус движителя и машину. Если величина центробежной силы массы окажется больше, чем сила трения машины об опорную среду, машина непременно переместится на новую точку расположения.
Если же центробежная сила массы окажется меньше, чем сила трения машины об опорную среду, машина останется на прежнем месте, а рабочая масса будет возвращена отражателем к ступице вала. При достаточной величине центробежных сил масс машина начнет двигаться в заданном направлении, т.к. вращающиеся массы будут набегать на отражатели одна за другой, создавая импульсные толчки. К концу пробега по отражателю, когда рабочая масса окажется вблизи ступицы, сила противодействия тел /инерционной массы и корпуса движителя/ исчезает. В задней полуокружности масса, свободная от дугового отражателя, начнет отходить от вала в радиальном направлении, не оказывая воздействия ни на вал, ни на корпус движителя. Таким образом, на известных движителях тяга создается путем прямого воздействия инерционных масс на отражатели корпуса в плоскости вращения масс, а направление их действия совпадает с направлением движения машины. Движители достаточно мощные, удобные в эксплуатации, экономичны и безусловно найдут широкое применение в транспортной технике. Недостатком этих движителей является малый диапазон рабочих скоростей инерционных масс /примерно не более 4-5 об/сек/. Увеличение скорости вращения масс выше этого предела приводит сначала к тряске, а затем и к полной потере тяги. Объясняется это тем, что массы, обладая, как все тела, свойством инертности, не могут мгновенно реагировать на изменения в направлениях ускорения. Они, например, на скоростях выше названного предела не успевают вытянуть до упора рычаги или стержни и они вступают в противодействие с дуговым отражателем где-то посередине или в конце дуги, а то и вовсе не касаются его. Поэтому, чтобы заметно увеличить мощность такого движителя необходимо изначально устанавливать на нем более тяжелые массы либо увеличивать длину рычагов /стержней/, т.е. изготовлять его более тяжелым и габаритным.
Целью настоящего изобретения является устранение этого недостатка и создание движителя, способного при равных массах и длине рычагов /стержней/ развивать на нем многократно большую тягу за счет высоких скоростей вращения инерционных масс.
Для решения этой задачи предлагается принципиально новая конструкция движителя. К ступице вала, шарнирно, с возможностью свободного наклона вдоль вала прикрепляются две-три пары рычагов с инерционными массами на концах. На рычагах, ближе к валу, устанавливаются опорные колесики. При вращении рычагов колесики прокатываются по дорожкам двух плоских колец. Колесики одной пары /тройки/ пробегают по внутреннему малому кольцу, другие - по внешнему большому кольцу. Кольца размещены вокруг вала перпендикулярно к оси вращения и могут осуществлять только движения вдоль вала. Осевое движение колец осуществляется при помощи стоек, прикрепленных к ним перпендикулярно с обратной стороны. Стойки входят в отверстия опорной плиты толкающего механизма и скользят в них. В коробке толкающего механизма они контактируются с эксцентриками, которые при вращении отталкивают их поочередно вместе с кольцами. Кольца же, в свою очередь, через опорные колесики синхронно отклоняют под углом к валу то одну пару /тройку/ рычагов с массами, то другую.
Эксцентрики насажены на валики в коробке толкающего механизма на одном уровне. Вращаются благодаря шестеренок синхронно в противоположные стороны. Один из валиков выступает из коробки и соединен с автономным приводом. Таким образом, в предлагаемом движителе вал с рычагами и эксцентрики могут вращаться с разными скоростями. Вал движителя - непосредственно двигателем, а эксцентрики - через автономный привод. Скорость вращения рычагов с массами задается двигателем, а эксцентриков - органом управления автономным приводом. Соотношение скоростей вращения регулируется /например, через коробку скоростей/ или заранее запрограммировано и происходит автоматически. С помощью двигателя создается необходимая скорость вращения рычагов с массами по окружности, а вместе с этим и необходимая сила тяги. Наклоны же рычагов, их отталкивание, производится с учетом инертности масс в оптимальном ритме, обеспечивая необходимую скорость движения машины. Например, при скорости вращения рычагов в 10 об/сек, инерционные массы могут отталкиваться один-два раза в секунду вместо десяти, как происходит на известных движителях. При этом, как видно, изменяется само направление противодействия тел в устройстве. На известных движителях оно, как отмечалась выше, происходит в плоскости вращения масс, в радиальном направлении. Инерционные массы толкают движитель в сторону направления радиальной инерционно-центробежной силы и оба тела перемещаются в одну сторону. Здесь же инерционно-центробежная сила вращающихся масс используется как опора, отталкиваясь от которой машина перемещается вдоль оси вращения, но в обратную сторону.
Создание опоры объясняется тем, что вращающиеся массы оказывают сильное противодействие при уменьшении радиуса их вращения, которое происходит при наклоне рычагов с массами вдоль вала. Величина этого противодействия, если отталкивать массы непосредственно по центру их тяжести, наполовину меньше их радиальной силы. Однако учитывая, что отталкивание масс производится через опорные колесики, установленные на рычагах ближе к валу, возникает рычажный момент силы не только равный по величине радиальной силе, но и значительно превышающий ее. Таким образом, даже при равных массах, радиусе, скорости вращения с известными движителями, не говоря уже о возможности значительного увеличения скоростей, предлагаемая конструкция устройства позволяет создавать более мощную тягу. Особенность нового устройства состоит также в том, что характер действия сил здесь носит реактивный принцип. Разница с известными реактивными устройствами состоит в том, что там, например, частицы сгораемого топлива через сопло выбрасываются в пространство безвозвратно, - здесь отбрасываемые массы на рычагах, создающие силу противодействия, после завершения силового импульса возвращаются в исходное состояние и готовы к новому импульсу. Силы противодействия постоянно возобновляются. Они работают для перемещения транспорта до тех пор пока происходит вращение на валу рычагов с массами и их отталкивание вдоль вала. Для полноты понимания природы возникновения тяги на движителях с использованием инерционных сил следует заметить, что центробежные силы, являющиеся особой формой проявления сил инерции во вращающихся системах, относятся к внешним силам. Они эквивалентны силам гравитационного поля. С той лишь разницей, что силы притяжения тел по мере удаления их друг от друга уменьшаются, а силы инерции во вращающихся системах по мере удаления от центра вращения, наоборот, увеличиваются. Силы инерции и силы гравитации действуют всюду /см. Яварский Б.М., Детлаф А.А. Справочник по физике, 1979, с. 35, 56, 57/. В рассматриваемом движителе сила тяги, как всякая сила инерции, возникает при изменении направления ускорения масс, когда они, в частности под воздействием другого тела, из радиального вращения переводятся в движение вдоль вала. Стоит приостановить это осевое воздействие - исчезнет тяга вдоль вала, хотя при этом вал с рычагами может вращаться с прежней скоростью, а массы будут давить на стойки и эксцентрики с прежней силой. Проще говоря, стоит прекратить отталкиваться от опоры и не делать "импульсные шаги" - остановится и само движение. Кроме этого, нельзя относить инерционные массы к внутренним телам устройства. Они же свободны в осевом направлении и не имеют жесткой связи с корпусом движителя.
На фиг. 1 показан общий вид движителя без боковых стенок корпуса и коробок.
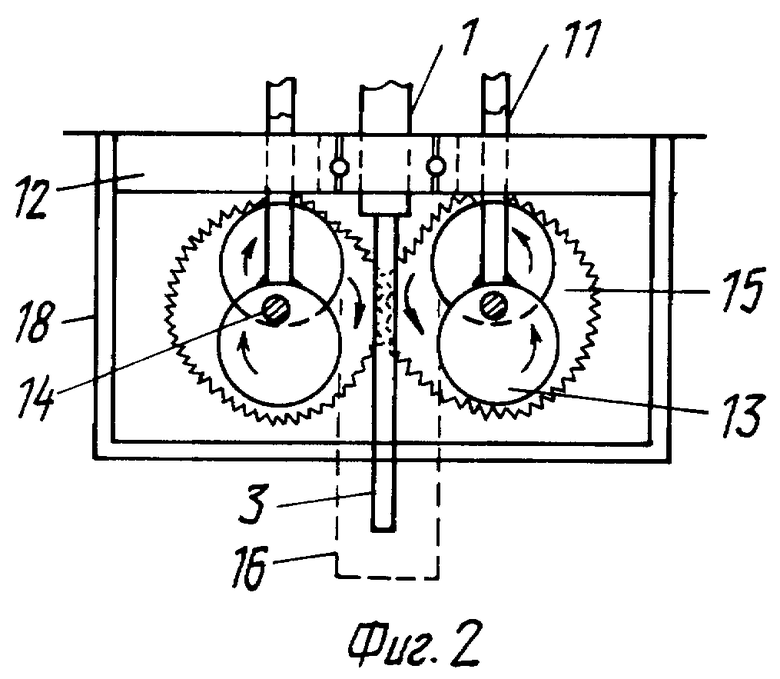
На фиг. 2 - нижняя часть толкающего механизма с изображением эксцентриков и шестерен в плане.
На фиг. 3 - общий вид движителя в плане без толкающих механизмов.
Движитель имеет /см. фиг. 1/ трубчатый вал 1 с продольными прорезями 2. Внутри вала шток 3, выходящий наружу из одного конца вала, другой конец вала прошлицован 4 для соединения с двигателем. Шток соединен со ступицей 5, в которой /см. фиг. 3/ на разных расстояниях от оси вращения размещены прямые рычаги 6 с инерционными массами 7. Вблизи ступицы на рычагах имеются опорные колеса 8. Колесики одной пары рычагов прокатываются по малому кольцу 9, другой пары - по большому кольцу 10 /см. фиг. 1 и 3/. На каждом плоском кольце имеются по четыре стойки 11. Они, удерживая кольца строго в перпендикулярном положении по отношению к оси вращения, контактируются через отверстия в опорной плите 12 с эксцентриками 13, насаженными на валики 14 /см. фиг. 1 и 2/. На двух валиках закреплено восемь эксцентриков. Для синхронного вращения эксцентриков валики соединены между собой шестернями 15. Перемещение штока со ступицей на валу до контакта рычагов с тем или иным толкающим механизмом обеспечивается силовым агрегатом /например, силовым цилиндром, обозначен пунктирно 16/. Вал с рычагами размещен в цилиндрическом корпусе 17 /см. фиг. 1 и 3/, а эксцентрики и шестерни толкающего механизма заключены в коробку 18, прикрепленную по центру вала с той и другой стороны корпуса движителя.
На чертежах изображен движитель с двумя парами рычагов, установленных на ступице крестообразно. Показан момент, когда одна пара рычагов с массами 7 оказалась отодвинутой эксцентриками 13 с помощью cтоек 11, малого кольца 9, колесиков 8 и рычагов 6 на самое отдаленное от толкающего механизма 18 расстояние. Рычаги наклонились по отношению к валу 1 под углом 45o. Массы второй пары, показанные с торца, в это время, наоборот, находятся от толкающего механизма на самом близком расстоянии, в перпендикулярной плоскости к валу. Сила противодействия масс первой пары рычагов 7 с корпусом движителя 17 в этот момент достигает максимума, а у второй - равна нулю. Допустим, что двигатель через привод и конец вала 4 вращает ступицу 5 с рычагами 6 и массами 7 со скоростью 10 об/сек, а валики же 14 с эксцентриками 13 через автономный привод и конец валика 19 будут вращаться со скоростью 1 об/сек, тогда обе пары рычагов с массами поменяются своим положением через пять оборотов вала и произойдет один импульс противодействия. За десять оборотов вала - два импульса. На известных движителях их было бы по меньшей мере десять. Эксцентрики 13 с помощью шестерен 15 вращаются на валиках 14 в противоположном направлении. Они скользят по подошвам стоек 11, отодвигая от себя поочередно то малое кольцо 9, то большое 10 и с помощью колесиков 8 отклоняют под углом к валу 1 рычаги с массами то одной пары, то другой. Массы 7 наряду с круговым вращением совершают осевые движения.
Для изменения направления тяги в противоположную сторону на данном движителе достаточно органами управления перевести с помощью штока 3 и силового агрегата 16 ступицу 5 с рычагами и массами из одного крайнего положения в другое. На фиг. 3 видно, что оси одной пары рычагов находятся ближе к оси вала, чем у другой, а это значит, что большое плечо у рычагов одной пары будет короче, чем у другой. Может возникнуть разновеликий импульс. Устранить этот незначительный недостаток можно путем сбалансированного утяжеления масс на укороченных рычагах.
Предлагаемый движитель обеспечит беспрепятственное движение транспорта в любых средах. Машины могут развивать большие скорости, т.к. ускорение движения возрастает в арифметической прогрессии. Небольшие по габаритам и весу движители способны развивать мощную тягу. Они просты, надежны, экономичны. Реальность их действия проверена на моделях-копиях.

Изобретение относится к машиностроению и предназначено для перемещения транспортных средств в любой среде. Движитель содержит корпус, вал и прямые рычаги с массами, предназначенными для кругового движения, два толкающих механизма, имеющие автономный регулируемый привод и опорные кольца, а также ступицу, которая соединена с валом и к которой шарнирно прикреплены упомянутые прямые рычаги с массами. Предусмотрены также эксцентрики, посаженные на валики, позволяющие проводить поочередные наклоны указанных рычагов с массами так, что массы наряду с круговым движением получают осевое движение вдоль вала. Для изменения направления тяги ступицу с помощью штока внутри полости вала перемещают к противоположному толкающему механизму. Изобретение направлено на уменьшение веса и габаритов. 3 з.п. ф-лы, 3 ил.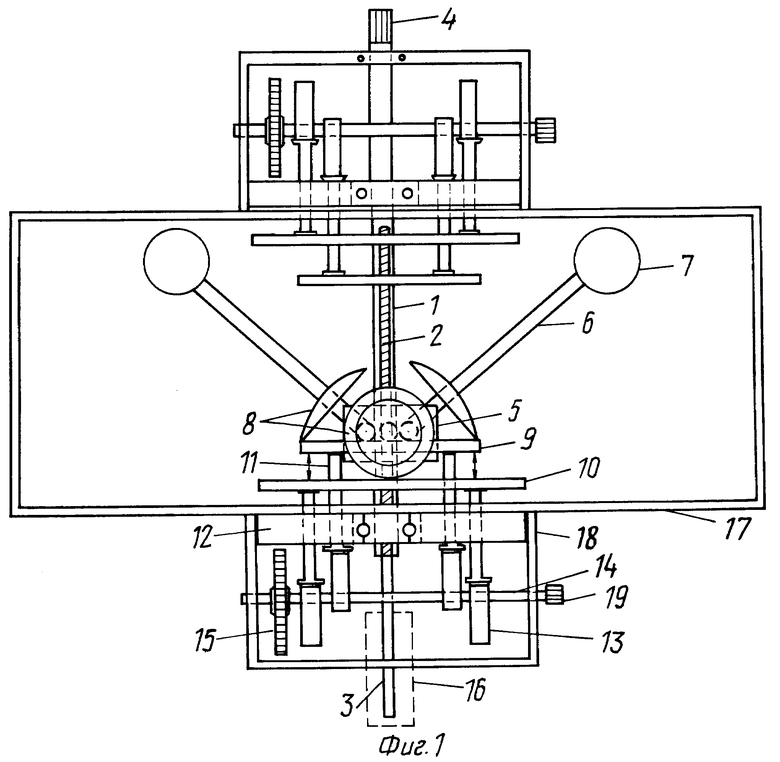
| ПУЛЬСАТОР | 1996 |
|
RU2111654C1 |
| СПОСОБ СОЗДАНИЯ ИНЕРЦИОННЫХ ОДИНАКОВЫХ ПО ВЕЛИЧИНЕ ИМПУЛЬСОВ В ЗАДАННОМ КООРДИНАТНОМ НАПРАВЛЕНИИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1994 |
|
RU2083419C1 |
| DE 3433411 А1, 20.03.1986 | |||
| УСТРОЙСТВО И СПОСОБ РАСПРЕДЕЛЕНИЯ ТЕКУЧИХ ИЛИ СПОСОБНЫХ К ОТЛИВКЕ МАСС, В ЧАСТНОСТИ ВОЗДУШНОГО ШОКОЛАДА | 2012 |
|
RU2608679C2 |
| JP 59000577 А 05.01.1984 | |||
| US 3807244 А 20.06.1974 | |||
| Толчин В.И | |||
| "Инерцоид", 1977, - Пермь: Книжное издательство, с | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |

