Изобретение относится к движителям транспортных средств шагающего типа.
Предполагается использовать для установки на индивидуальные транспортные средства, в том числе и для инвалидов; сельскохозяйственную и строительную технику.
Уровень техники
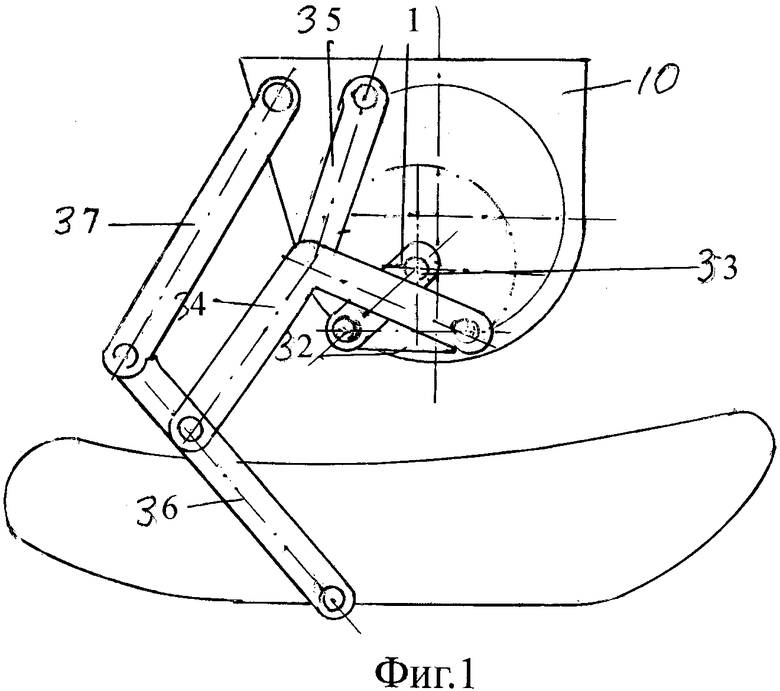
Известен шагающий движитель транспортного средства, модернизация плоского лямбдаобразного механизма Чебышева (патент RU №2009936, МПК B62/D 57/032), содержащего приводной кривошип 1 (фиг. 1) и тягу 32, шарнирно соединенную с кривошипом 33. Последний шарнирно соединен с шатуном 34, средняя часть которого через качалку 35 шарнирно связана с корпусом. Свободный конец шатуна 34 шарнирно соединен со средней частью рычага 36, нижний конец которого шарнирно соединен с опорой, а верхний через дополнительную качалку 37 - с корпусом 10. При равномерном вращении кривошипа 1 нижний конец рычага равномерно движется по опорному участку траектории, причем находится в контакте с грунтом половину времени цикла.
Недостатками такого движителя являются малая высота подъема опор, необходимость применения двух движителей для обеспечения непрерывного цикла движения, трудности при маневрировании.
Сущность изобретения
Предлагаемое изобретение направлено на создание быстроходного по сравнению с другими транспортными средствами этого же типа шагающего транспортного средства - вертохода, способного передвигаться как по бездорожью, с преодолением вертикальных препятствий, при минимальном воздействии на грунт, так и по дорогам с твердым покрытием без разрушения их поверхности. При этом предполагается исключить принудительное скольжение опор по грунту, в том числе и при маневрировании, при условии правильного, показанного ниже расположения движителей на транспортном средстве.
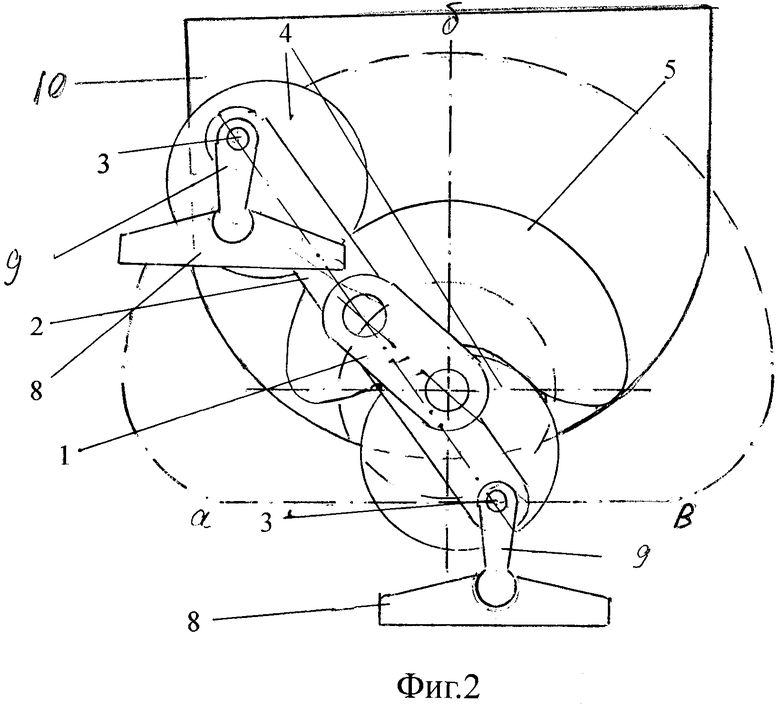
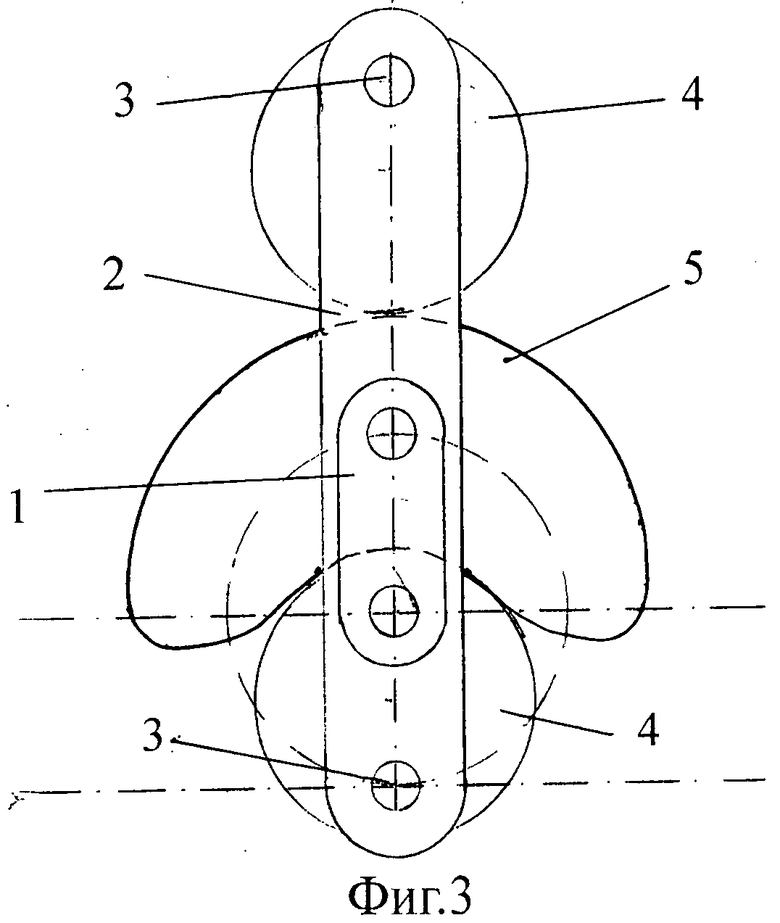
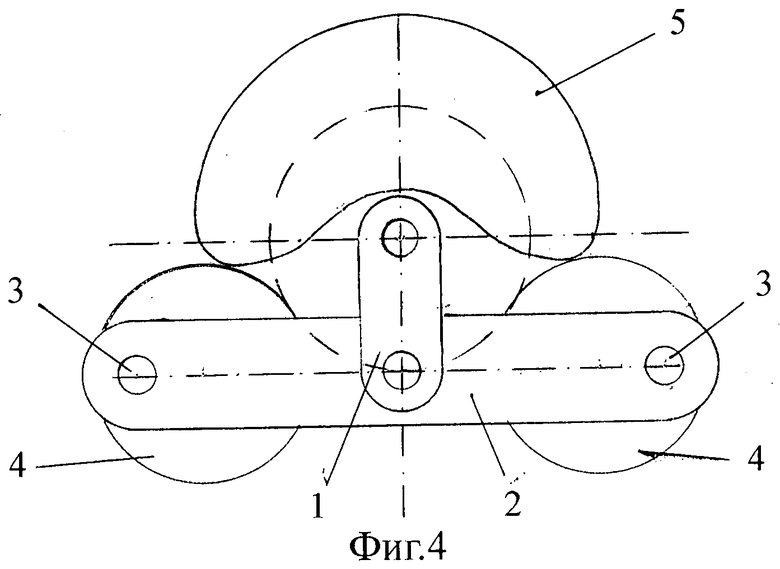
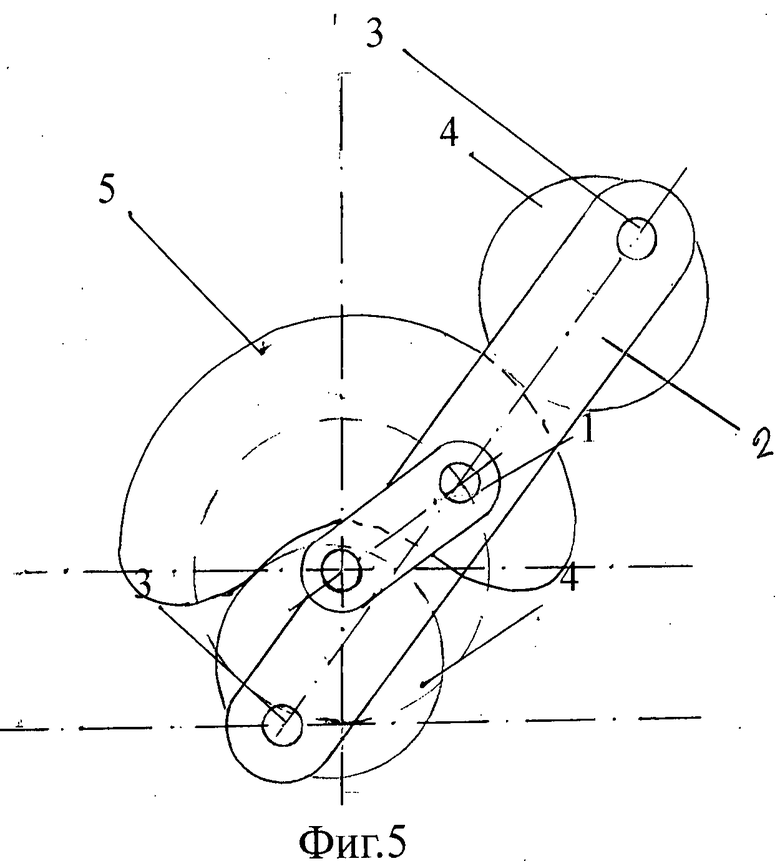
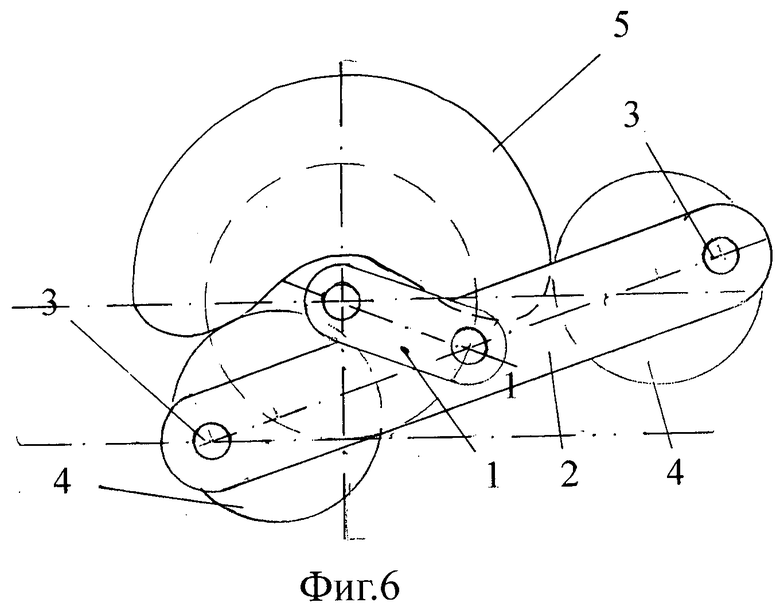
Шагающий движитель содержит приводной кривошип 1 (фиг. 2), шарнирно соединенный со срединой моста 2, на концах которого шарнирно закреплены валы опор 3. Расстояние между центрами валов опор (шаг движителя) равно длине четырех радиусов приводного кривошипа. На расстоянии трех радиусов кривошипа, по линии между центрами опор равноудаленного от центра моста закрепляют оси роликов 4 опорно-поворотного механизма движителя. При повороте приводного кривошипа ролики 4 катятся по специально обработанной кромке опорной направляющей пластины определенной формы 5, жестко закрепленной на корпусе 10, и, упираясь в кромку этой пластины, заставляют мост принимать строго определенное положение, при котором расстояние между корпусом движителя и опорной частью траектории должно быть одинаково при любом положении кривошипа (фиг. 3, 4, 5, 6). При повороте кривошипа один конец моста с опорой перемещается по опорному участку траектории а - в, другой совершает вращение вокруг вала первой опоры. Форма опорной направляющей пластины образуется внутри траектории движения роликов при одновременном вращении кривошипа и перемещении одного из концов моста по опорному участку траектории а - в фиг. 2.
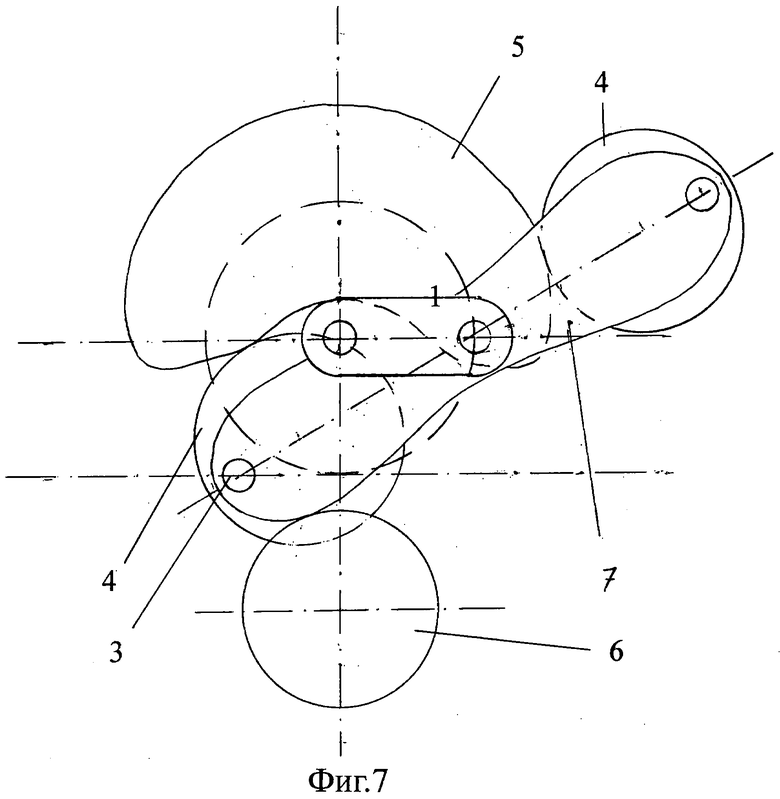
Для уменьшения нагрузки на опорно-поворотный механизм на корпусе устанавливается дополнительный ролик 6 (фиг. 7, 13), центр которого ниже центра вращения кривошипа на длину двух его радиусов. К мосту в свою очередь жестко крепится опорная направляющая пластина 7, форма которой обеспечивает постоянный контакт ее кромки с дополнительным роликом 6 при повороте кривошипа и моста. К валам опор, шарнирно закрепленных на концах моста, присоединены шаровые пальцы 9 (фиг. 2, 13), которые при любом наклоне моста, при помощи параллелограммного или зубчатого механизма должны находиться в вертикальном положении. Башмаки 8, шарнирно соединенные с пальцами 9, имеют возможность совершать как вращательные, так и наклонные движения.
Предлагаются варианты расположения движителей на платформе транспортного средства, при которых сводится к минимуму принудительное скольжение опор по грунту.
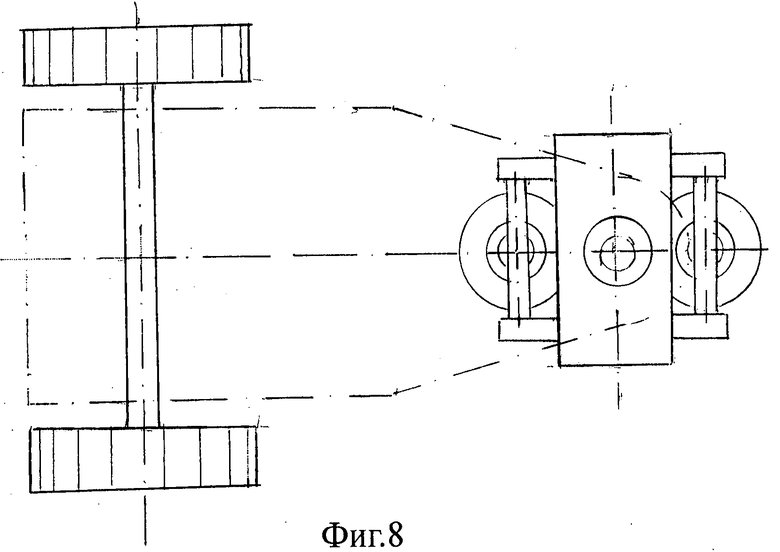
Фиг. 8, 9. Транспортное средство оборудовано одним или двумя движителями, расположенными по бокам, работающими в агрегате с колесными движителями.
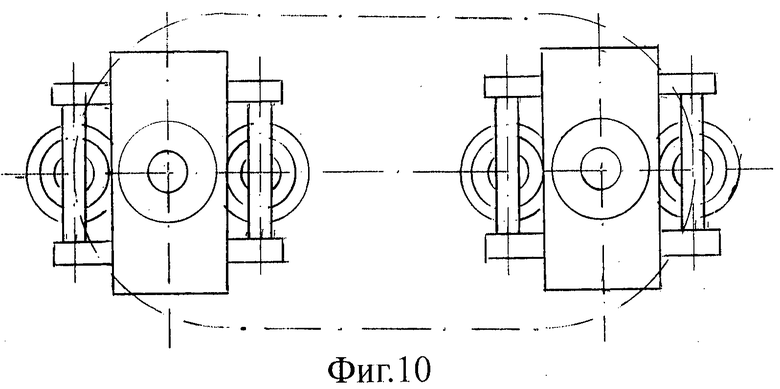
Фиг. 10. Транспортное средство оборудовано двумя движителями, расположенными один за другим - спереди и сзади. Равновесие при езде контролируется водителем, как на велосипеде. Управляемыми могут быть как оба движителя, так и один из них.
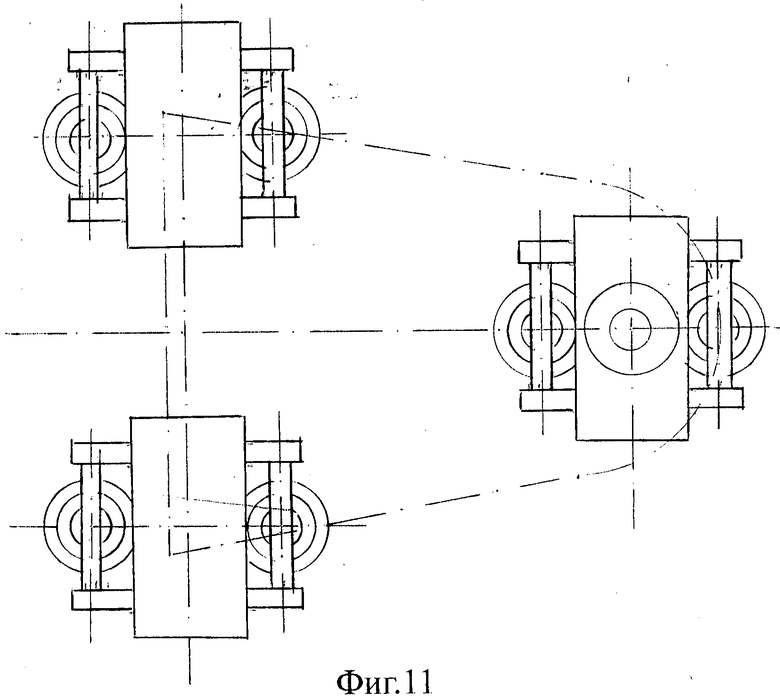
Фиг. 11. Транспортное средство оборудовано тремя движителями - спереди по центру устанавливают управляемый движитель, соединенный с рулевым механизмом. Остальные два крепятся сзади.
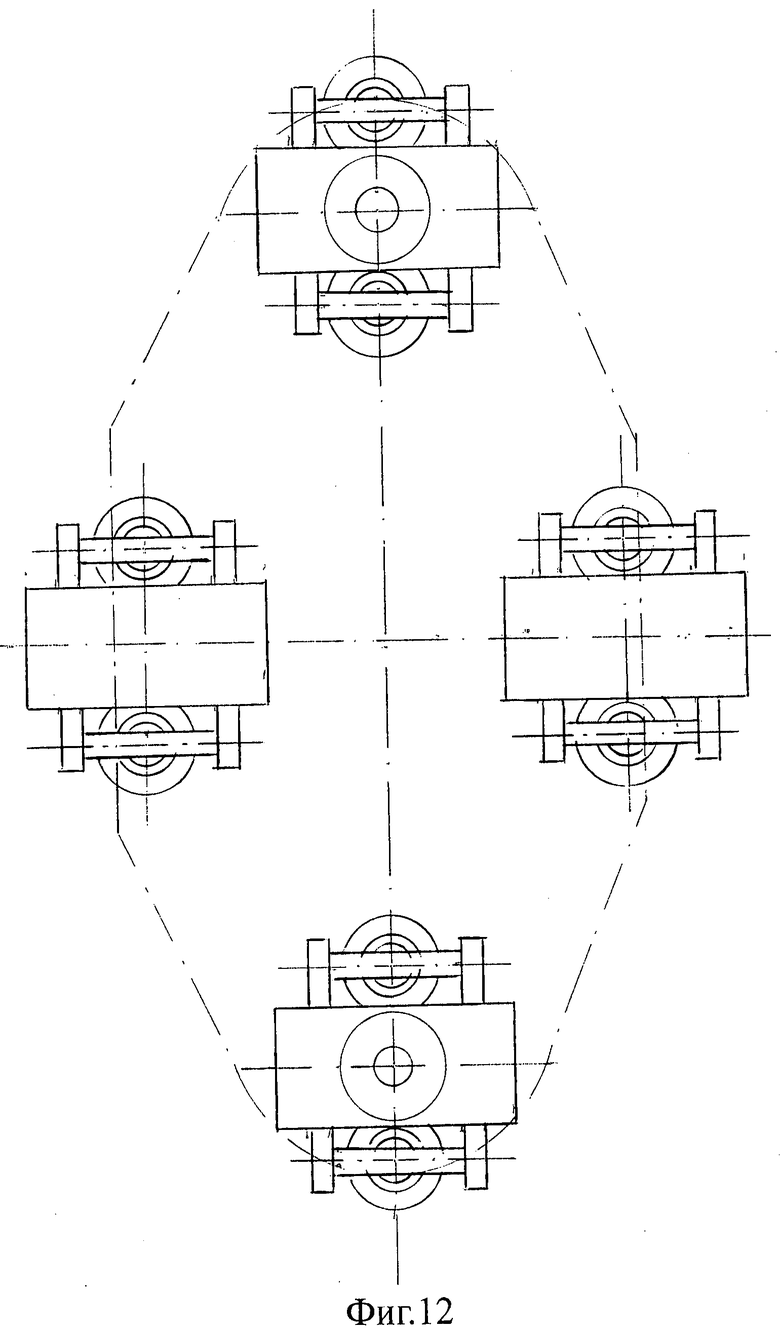
Фиг. 12. Транспортное средство оборудовано четырьмя движителями - два устанавливают шарнирно спереди и сзади по центральной линии и соединяют с рулевым механизмом так, чтобы они поворачивались в противоположные стороны. Два других движителя крепятся жестко по бокам платформы в средней ее части.
Существенными признаками изобретения являются: процесс перешагивания образуется в результате одновременного вращения основных узлов движителя - моста и кривошипа - и при переступании с одной опоры на другую линейная скорость не меняется, что позволит добиться увеличения скорости по сравнению с другими шагающими машинами; высота подъема опор равна шагу движителя, что позволит преодолевать значительные вертикальные препятствия; отсутствие принудительного скольжения опор по поверхности дороги как при прямолинейном движении, так и при маневрировании приведет к уменьшению энергозатрат, повышению проходимости и увеличению срока службы опор движителя при условии определенного, как показано на схемах в описании, расположения движителей на корпусе транспортного средства; заявляемый шагающий движитель обеспечивает полный непрерывный цикл работы.
Перечень чертежей:
1. Схема аналога предлагаемого движителя.
2. Принципиальная схема мостового шагающего движителя.
3 и 4. Схема расположения деталей опорно-поворотного механизма при крайнем верхнем и нижнем положении приводного кривошипа.
5 и 6. Схема расположения деталей опорно-поворотного механизма при промежуточных положениях кривошипа.
7. Схема опорно-поворотного механизма движителя с отдельной траверсой и дополнительным роликом.
8. Схема транспортного средства (далее - Т.С.) с одним шагающим движителем и двумя колесами.
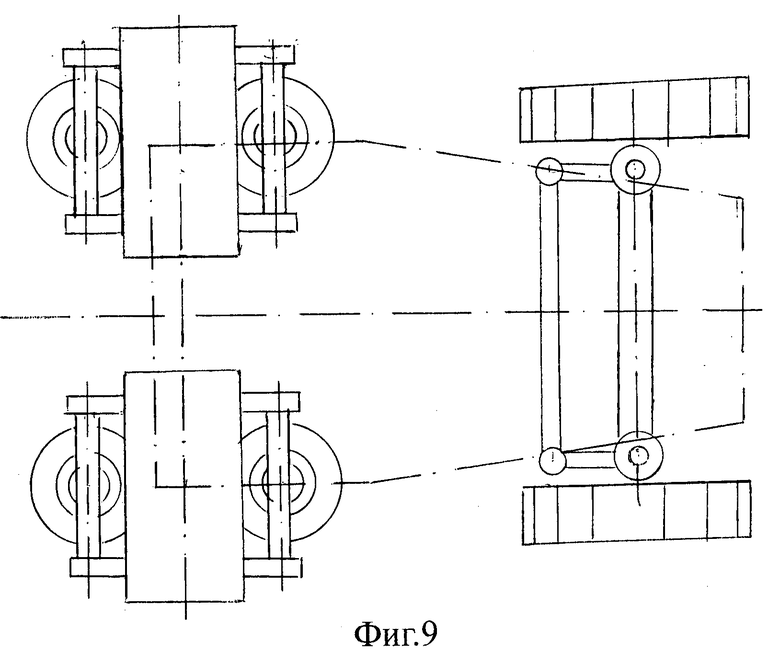
9. Схема Т.С. с двумя боковыми шагающими движителями и двумя управляемыми колесами.
10. Схема Т.С. с двумя шагающими движителями, расположенными по центру платформы.
11. Схема Т.С. с тремя шагающими движителями.
12. Схема Т.С. с четырьмя шагающими движителями.
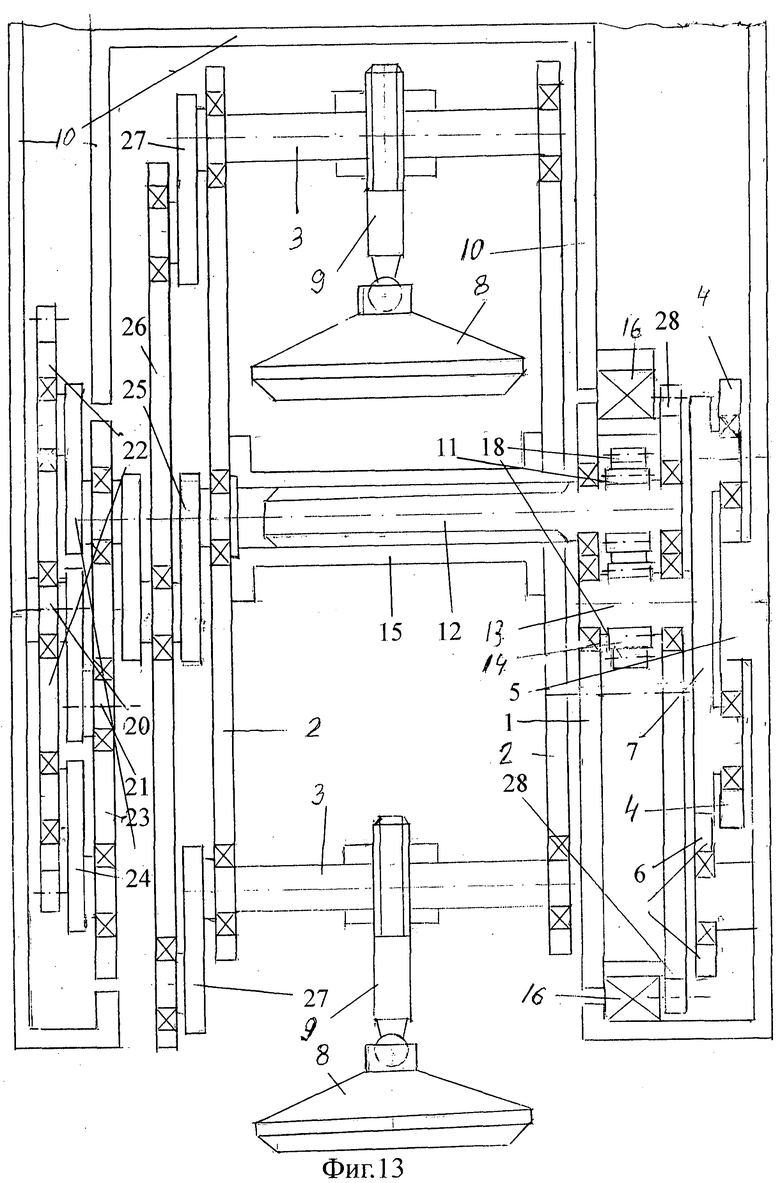
13. Опытный образец управляемого шагающего движителя в разрезе. Сведения, подтверждающие возможность осуществления изобретения.
На фиг. 13 изображен один из вариантов опытного образца мостового шагающего движителя в разрезе. Приводной кривошип выполняется в виде барабана 1, который вместе с шестерней 28 вращается в подшипнике большого диаметра 16, закрепленного на внутренней стороне П-образного корпуса 10. Для защиты от попадания посторонних предметов и грязи между роликами и опорной направляющей пластиной последние выделяются в отдельный опорно-поворотный механизм и помещаются внутрь корпуса. Для уменьшения размеров механизма и корпуса траверса 7, выполненная в форме дополнительной опорной направляющей пластины и своей кромкой находится в постоянном контакте с дополнительным роликом 6, шарнирно закрепленным на внутренней стенке корпуса, жестко соединена с валом 13 с шестерней 14, постоянно связанной через промежуточную шестерню 18 с жестко насаженной на шлицевой вал 12 шестерней 11, идентичной шестерне 14. При этом во сколько раз центр вращения траверсы 7 ближе к центру вращения барабана-кривошипа 1, чем центр вала12 моста 2, во столько же раз уменьшаются размеры опорно-поворотного механизма. На концах балок моста установлены подшипники, в которых вращаются валы 3, к серединам которых жестко крепятся шаровые пальцы 9 опор 8.
Середины обеих балок моста жестко соединены втулкой 15 с внутренними шлицами, в которую входит шлицевой вал 12. В другой стороне П-образного корпуса размещен механизм вертикальной стабилизации шаровых пальцев опор относительно корпуса движителя. Внутри, к внешней стенке корпуса жестко крепится ось 20 с шарнирно установленной на ней шестерней 22 и жестко закрепленным на ее конце кривошипом 21, с шарнирно установленным на нем диском 23. Эти шестерню и диск шарнирно связывают между собой двухколенным кривошипом 24 и четырехколенным 25. К третьему колену шарнирно крепится штанга 26, через кривошипы 27 шарнирно соединенная с валами шаровых пальцев 9. Четвертое колено кривошипа шарнирно соединено со срединой второй балки 14 моста шагающего движителя. Шестерня 22 и диск 23 при движении синхронно вращаются вместе с барабаном-кривошипом в одном и том же направлении.
Для управления транспортным средством к верхней площадке корпуса движителя крепится шкворень, шарнирно соединенный с цапфой, закрепленной на раме транспортного средства. На шкворень жестко крепится рычаг известными техническими средствами, связанный с рулем, установленным в кабине водителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| Карусельный двигатель | 2021 |
|
RU2791634C2 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| Шагающее колесо транспортного средства | 1985 |
|
SU1303442A1 |
| СИЛОВАЯ ИНЕРЦИОННАЯ УСТАНОВКА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044158C1 |
| Многоопорный шагающий движитель | 1990 |
|
SU1801854A1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009938C1 |
| Шагающий движитель транспортного средства | 1981 |
|
SU988635A1 |
Изобретение относится к шагающему движителю. Шагающий движитель содержит приводной кривошип, который шарнирно соединен со срединой моста, на концах которого шарнирно закреплены валы с закрепленными на них шаровыми пальцами, шарнирно соединенными с башмаками опор. Расстояние между центрами валов опор равно длине четырех радиусов кривошипа. На расстоянии трех радиусов кривошипа на балке моста по линии, соединяющей центры валов опор, шарнирно устанавливают ролики опорно-поворотного механизма. При повороте приводного кривошипа ролики катятся по опорно-направляющей пластине, жестко закрепленной на корпусе, а одна из опор перемещается по опорному участку траектории. Расстояние между корпусом и опорным участком траектории одинаково при любом положении кривошипа. Технический результат - повышение скорости, проходимости и маневренности движителя. 13 ил.
Шагающий движитель, содержащий корпус с приводным кривошипом, отличающийся тем, что приводной кривошип шарнирно соединен со срединой моста, на концах которого установлены валы с закрепленными на них шаровыми пальцами, шарнирно соединенными с башмаками опор, расстояние между центрами которых составляет четыре радиуса кривошипа, а на расстоянии трех радиусов кривошипа на балке моста по линии, соединяющей центры валов опор, или на отдельной траверсе, жестко закрепленной на валу моста, или связанной с ним зубчатой передачей, шарнирно устанавливают ролики опорно-поворотного механизма, находящиеся в постоянном контакте и катящиеся при повороте кривошипа по кромке, жестко закрепленной на корпусе опорной направляющей пластины формы, образованной внутри траектории движения роликов при одновременном вращении кривошипа и моста, при этом одна из опор перемещается по опорному участку траектории, причем расстояние между корпусом и опорным участком траектории должно быть одинаково при любом положении кривошипа.
| ОПТИМИЗИРОВАННОЕ ОХЛАЖДЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ ПРИ НАСОСНО-КОМПРЕССОРНОЙ ДОБЫЧЕ | 2014 |
|
RU2686971C2 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2009936C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| RU 2063898 C1, 20.07.1996. | |||

