Изобретение относится к области ракетной техники и может быть использовано для высокоманевренных ракет и ракет, работающих в высоких слоях атмосферы.
Аэродинамическая схема ракеты в сочетании с газодинамическим устройством (далее по тексту ГДУ) предназначены для создания в продольных плоскостях ракеты управляющих аэродинамических сил за счет отклонения набегающего воздушного потока подвижными рулями ракеты и газодинамических сил за счет отклонения газового потока ракетного двигателя. Такое сочетание обеспечивает вывод ракеты на большие углы атаки, удержание ее на этих углах, повышенную маневренность и управляемость ракеты, в том числе при малых скоростях полета, и позволяет компенсировать разбежку центровки в процессе работы ракеты.
Исходя из принципа формирования боковых газодинамических сил, в ракетной технике, в основном, используются два способа управления вектором тяги двигателя: поворот сопла двигателя; механическое воздействие на истекающий из двигателя газовый поток отражателями различного типа.
Эффективность ГДУ определяют следующие показатели:
величина относительной боковой силы  , где Py боковая сила; Pхо тяга двигателя при Py=0;
, где Py боковая сила; Pхо тяга двигателя при Py=0;
коэффициент потери тяги  где ΔPxo потеря тяги двигателя при создании боковой силы;
где ΔPxo потеря тяги двигателя при создании боковой силы;
величина шарнирного момента привода (Мш), необходимого для создания боковой силы;
быстродействие ГДУ;
весовые и габаритные показатели;
работоспособность.
Французская ракета с комбинированным управлением "MICA" снабжена ГДУ в виде газовых рулей, размещенных в сопловом блоке ракетного двигателя и работающих вместе с аэродинамическими рулями (см. журнал Aviation Week and Space Technology, т. 122 N 25, 1985, с. 83). Основными недостатками газовых рулей является потери тяги двигателя при "нулевом" положении рулей (Py=0) из-за постоянного нахождения рулей в зоне газового потока двигателя, а также наличие потребного шарнирного момента на привода рулей на уровне 1,5.2,0 кГм.
Известна ракета с комбинированным управлением, содержащая размещенные в корпусе ракеты аппаратуру системы наведения и управления, двигатель, четыре подвижных аэродинамических руля и неподвижные крылья, расположенные на корпусе равномерно относительно продольной оси ракеты, и блок ГДУ, установленный на силовой части двигателя и содержащий четыре интерцептора, отклоняющие газовую струю работающего двигателя, выбранная в качестве прототипа по данной заявке (см. журнал "Military Technology" том XYII, июль, 1994, с. 20-21).
Блок ГДУ с интерцепторами в составе выбранной в качестве прототипа ракеты содержит раму, на которой установлены раструб соплового блока двигателя, четыре подвижных интерцептора и привода, кинематически соединенные и интерцепторами. Блок ГДУ через торец раструба соплового блока закреплен, например, на газоходе двигателя. Ввод в газовый поток работающего двигателя, за плоскость среза его сопла, интерцепторов отклоняет газовый поток, создавая боковую силу.
Конструкция прототипа имеет ряд недостатков в том числе:
отсутствует координация положения интерцепторов относительно расположения аэродинамических рулей, что усложняет систему управления ракеты, синхронизацию работы блока ГДУ и аэродинамических рулей, не исключает появление "паразитных" составляющих газодинамических сил;
наличие четырех изолированных интерцепторов требует применения четырех автономных приводов на каждый интерцептор или сложной кинематической схемы управления интерцепторами, исключающей несинхронную работу интерцепторов;
отсутствуют компенсационные устройства, обеспечивающие достижение минимальных радиальных зазоров между кромкой сопла и интерцептором, что приводит к утечке газа через указанные зазоры и газодинамическим потерям боковой силы и тяги двигателя;
вектор равнодействующей сил давления газа на интерцептор, введенный в газовый поток, приложенный в центре тяжести введенной части интерцептора и направленный перпендикулярно поверхности интерцептора, создает дополнительный момент относительно оси вращения интерцептора, что увеличивает потребный шарнирный момент привода интерцептора;
конструкция блока, функционирующая в высокотемпературной газовой струе, содержащей твердые частицы окислов металлов, характерной для современных высокоимпульсных твердых топлив, применяемых в ракетной технике, обладает низкой работоспособностью из-за значительного теплового и эрозионного воздействия газового потока на элементы конструкции, особенно в газовый поток.
Анализ вышеуказанных недостатков показывает, что они существенно снижают технические, конструктивные и эксплуатационные параметры ракеты с комбинированным управлением, выбранной за прототип, и, в определенной степени, ограничивают возможности ее применения.
При разработке заявленной ракеты с комбинированным управлением стояла задача создания конструкции, более полно адаптированной к системе управления ракеты, с упрощенными механизмом управления и кинематикой блока ГДУ, обеспечивающей синхронную работу интерцепторов, улучшенными показателями эффективности блока ГДУ.
Для решения этой задачи в заявленной ракете, содержащей размещенные в корпусе двигатель, аппаратуру системы наведения и управления, четыре аэродинамические руля и неподвижные крылья, расположенные на корпусе равномерно относительно его продольной оси, и блок газодинамического управления, закрепленный, например, на газоходе двигателя и имеющий четыре диаметрально расположенных интерцептора, кинематически связанных и установленных с возможностью ввода в газовый поток работающего двигателя за срезом его сопла, предусмотрены ряд взаимосвязанных конструктивных решений.
Четыре интерцептора блока ГДУ располагаются по каналам управления ракеты, в плоскостях расположения аэродинамических рулей. Такое решение позволяет синхронизировать совместную работу газодинамических интерцепторов блока и аэродинамических рулей по единой команде, поступающей от системы управления ракеты, и исключает появление "паразитных" составляющих газодинамических сил.
Диаметрально расположенные интерцепторы попарно с помощью траверс жестко соединены в два рычага, каждый из которых кинематически связан со штоком привода, и взаимно перпендикулярные оси вращения рычагов пересекаются в точке "О", расположенной на продольной оси ракеты.
Такое решение позволяет сократить до двух количество приводов, необходимых для перемещения интерцепторов, при упрощенной кинематической связи их с приводом, а также синхронизировать работу двух противоположных интерцепторов, исключая возможность одновременного нахождения их в газовой струе и создания взаимно уничтожающих противоположно направленных газодинамических сил.
Поверхности интерцепторов, обращенные в сторону плоскости среза сопла, выполнены в виде сферы, центр которой находится в точке пересечения осей вращения рычагов.
Данное конструктивное исполнение обеспечивает воздействие газового потока на сферическую поверхность интерцепторов, при этом достигается прохождение вектора равнодействующей сил давления газа на интерцептор через центр сферы, совпадающей с точкой пересечения осей вращения рычагов, в результате чего газодинамическая составляющая шарнирного момента, приложенного к штоку привода рычага, отсутствует, и потребная мощность привода значительно снижается.
Часть интерцепторов, вводимая в газовый поток и обращенная в сторону сопла двигателя, выполнена в виде накладки. Между накладками и траверсами рычагов устанавливаются регулированные прокладки различной толщины.
Использование регулировочных прокладок между накладками и траверсами рычагов позволяет выставить сферические поверхности всех четырех интерцепторов с необходимой точностью в единой сферической поверхности.
Между торцом сопла и рамой блока ГДУ установлены регулировочные прокладки, позволяющие обеспечивать минимально возможный технологический зазор между сферическими поверхностями интерцепторов и торцевой поверхностью сопла, обращенной в сторону интерцепторов.
Такое конструктивное решение снижает газодинамические потери блока, связанные с радиальными утечками газа через зазоры между интерцепторами и торцем сопла, что повышает коэффициент газодинамического качества и относительную величину боковой силы.
Накладки интерцепторов изготовлены из жаро- и эрозионностойких материалов, например на основе вольфрамо-медных и молибденовых сплавов, на траверсах рычагов и наружной поверхности раструба сопла установлены защитные экраны из тех же сплавов.
Использование в конструкции жаро- и эрозионностойких материалов обеспечивает работоспособность блока ГДУ в газовой струе, с температурой торможения до 3500 K и содержащей до 15% твердых частиц окислов металлов.
На фиг. 1 показан общий вид ракеты с комбинированным управлением;
на фиг. 2 поперечный разрез ракеты с видом на аэродинамические рули;
на фиг. 3 вид на ракету со стороны блока ГДУ;
на фиг. 4 общий вид блока ГДУ; интерцепторы блока находятся в нейтральном положении.
на фиг. 5 общий вид блока ГДУ; один из интерцепторов находится в положении максимального ввода за плоскость среза сопла;
на фиг. 6 стыковка привода блока ГДУ с рычагом.
Ракета с комбинированным управлением представляет собой корпус 1, в котором установлены аппаратура 2 наведения и управления, двигатель 3 с газоходом 4, блок ГДУ, закрепленный на газоходе 4. На корпусе 1 находится четыре аэродинамических руля 6 и неподвижные крылья 7. Рули 6 и крылья 7 равномерно размещены относительно продольной оси ракеты и расположены во взаимноперпендикулярных плоскостях по каналам управления ракеты.
Блок ГДУ состоит из рамы 8, на которой закреплен фланец сопла 9 двигателя. На раме 8 смонтированы четыре интерцептора 10, расположенные по каналам управления ракеты в плоскостях установки аэродинамических рулей 6. Диаметрально расположенные интерцепторы 10 попарно жестко соединены траверсами 11 и образуют два рычага (внутренний 12 и внешний 13). Рычаги 12, 13 имеют запрессованные в них подшипники 14, с помощью которых они вращаются вокруг осей 15, установленных в проушинах рамы 8. На раме 8 закреплены привада 16, штоки которых через подшипники 17 и 18 установлены в проушинах рычагов 12, 13.
На траверсах 11 рычагов 12, 13 установлены накладки 19, изготовленные из жаро- и эрозионностойких материалов на основе вольфрамо-медных и молибденовых сплавов.
Поверхности накладок 19, обращенные в сторону плоскости среза сопла, выполнены сферическими с центром сферы, совпадающей с точкой "О" пересечения осей вращения рычагов. Между накладками 19 и траверсами 11 установлены регулировочные прокладки 20. Накладки 19 и прокладки 20 крепятся к траверсам и между собой на клею и болтами 21.
Регулировочные прокладки 22 устанавливаются также между фланцем сопла 9 и рамой 8. Блок ГДУ 5 через фланец сопла 9 жестко крепится, например, к газоходу 4 двигателя 3. На траверсах 11 рычагов 12, 13 и наружной поверхности сопла 9 установлены защитные экраны 23 из материалов аналогичных материалам накладок 19 интерцепторов 10.
Заявленная ракета с комбинированным управлением работает следующим образом. При наличии от аппаратуры 2 наведения и управления сигналов на приводы аэродинамических рулей 6 и приводы 16 блока ГДУ 5 происходит поворот рулей 6 с образованием аэродинамических боковых управляющих сил и ввод соответствующего интерцептора 10, находящегося в том же канале управления, в газовый поток за плоскостью среза сопла двигателя. Создание газодинамических сил основано на формировании на внутренней поверхности сопла 9 неравномерного поля давления при механическом воздействии интерцептора 10 на истекающий из сопла 9 газ. При введении инерцептора 10 поток газа тормозится с образованием зоны повышенного давления в плоскости соответствующего канала управления, создавая боковую газодинамическую силу и снижая тягу двигателя, направленную по продольной оси ракеты. В зависимости от сигналов вводятся один или два интерцептора 10, создавая управляющие газодинамические силы в одной или двух плоскостях каналов управления ракеты одновременно.
Величина боковой силы и потери тяги двигателя при вводе интерцепторов 10 зависят от уровня давления газа в двигателе и от величины ввода интерцепторов в газовый поток.
Эффективность заявленного изобретения, как показали конструктивные проработки и экспериментальные работы, заключается в реальной возможности получения на ракете относительной величины боковой газодинамической силы в пределах  0,15.0,25 при коэффициенте потери тяги двигателя
0,15.0,25 при коэффициенте потери тяги двигателя  0,01.0,025, потребном шарнирном моменте Мш 0,5 кГм, с обеспечением работоспособности блока ГДУ в условиях газовой струи с температурой торможения до 3500 K, содержащей до 15% твердых частиц окислов металлов.
0,01.0,025, потребном шарнирном моменте Мш 0,5 кГм, с обеспечением работоспособности блока ГДУ в условиях газовой струи с температурой торможения до 3500 K, содержащей до 15% твердых частиц окислов металлов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045741C1 |
| РАКЕТА | 1996 |
|
RU2094748C1 |
| МЕХАНИЗМ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ РАКЕТОЙ | 2005 |
|
RU2316720C2 |
| РАКЕТА | 2005 |
|
RU2272984C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА СТАРТА И ОРИЕНТАЦИИ РАКЕТЫ | 1995 |
|
RU2082946C1 |
| РЕАКТИВНЫЙ СНАРЯД | 1998 |
|
RU2134400C1 |
| РАКЕТА | 2014 |
|
RU2548957C1 |
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, СНАБЖЕННЫМ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ С РЕАКТИВНЫМИ СОПЛАМИ | 2014 |
|
RU2570745C2 |

Использование: ракетная техника. Сущность изобретения: ракета с комбинированным управлением содержит корпус, двигатель, аппаратуру наведения и управления, четыре аэродинамических руля и неподвижные крылья, расположенные на корпусе равномерно относительно его продольной оси, закрепленный на газоходе двигателя блок газодинамического управления в виде четырех, диаметрально расположенных интерцепторов, установленных с возможностью ввода в газовый поток за срезом сопла двигателя. Каждый интерцептор установлен в плоскости расположения соответствующего аэродинамического руля. Диаметрально расположенные интерцепторы попарно жестко соединены траверсой в два рычага, каждый из которых кинематически связан с автономным приводом, при этом взаимно перпендикулярные оси вращения рычагов пересекаются в точке, расположенной на продольной оси ракеты. 5 з.п. ф-лы, 6 ил.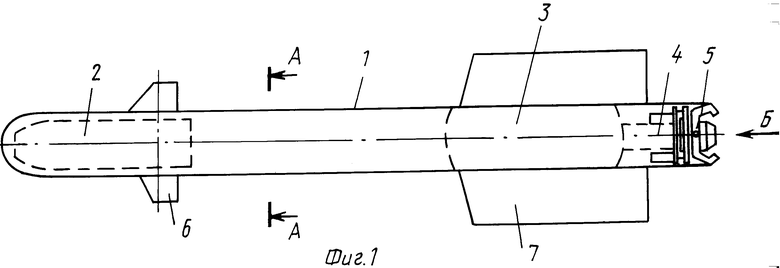
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 3945588, кл | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| DE, заявка, 4135783, кл | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Military Technology | |||
| Бонн (DE), Monch Publishing Group, t | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |

