Основной областью применения изобретения является авиация. Оно может быть использовано для решения летчиком пилотажно-навигационных задач на всех типах летательных аппаратов (ЛА). Кроме того, оно может также с успехом использоваться для управления космическими ЛА, подводными лодками, т.е. может быть реализовано при движении объектов в атмосфере, космосе и под водой.
Известен способ пилотирования ЛА по задаваемой траектории с задаваемой скоростью, включающей задание траектории, определение положения и параметров движения ЛА в пространстве для формирования на экране электронного индикатора подвижного индекса, наводимого датчиком посредством отклонения рычагов управления в задаваемую точку экрана.
В настоящее время этот способ пилотирования самолета летчиком (см., например, "Система автоматического и директорного управления самолетом". И.А. Михалев и др.- M.: Машиностроение, 1974 г., стр. 65) реализован практически на всех типах ЛА.
Закон отклонения подвижного индекса формируется таким образом, чтобы при непрерывном выдерживании его датчиком с помощью рычагов управления в середине индикатора будет происходить выведение ЛА на траекторию, а затем и полет по ней. Директорное пилотирование по существу является частью замкнутого контура автоматического управления и специально не разрабатывалось для ручного управления ЛА. В директорном способе пилотирования летчик как бы выполняет простейшие функции исполнительного механизма - он должен отклонять ручку управления пропорционально отклонению подвижного индекса.
Недостатки директорного способа пилотирования ЛА летчиком сводятся к следующему.
1. Для пилотирования ЛА вне визуальной видимости помимо директорного индекса для построения образа полета летчику требуется перерабатывать большой объем дополнительной навигационно-пилотажной информации. Затрудняется навигационно-пространственная ориентировка и прогнозирование летчиком своих дальнейших действий, что не позволяет быстро и правильно принимать ему решения об изменении стратегии пилотирования в случае возникновения непредвиденных обстоятельств, а также реализовать рациональные маневры вблизи эксплуатационных ограничений, накладываемых на ЛА. Кроме того, имеет место противоречие между сформировавшейся манерой пилотирования ЛА летчиком при визуальном полете и управлением, навязываемым ему директорной системой.
2. Для обеспечения необходимой точности пилотирования летчик должен непрерывно напрягаться, удерживая подвижный индекс в середине индикатора, осуществляя тем самым чисто операторскую деятельность с неосознанным привитием моторных навыков. При этом реализуется так называемое компенсаторное слежение, которое не позволяет получить высокую точность при полете по сложным пространственным траекториям (являющимся, как правило, рациональными). Желание максимально повысит точность пилотирования приводит к впадению летчика в доминантное состояние и высокой степени его утомляемости. В случае допуска больших отклонений при высокой чувствительности директорного индекса он выходит на ограничения и становится неподвижным, что создает у летчика неопределенность в пилотировании. В известном способе не предусмотрено выдерживание заданной скорости полета ЛА.
3. Не обеспечивается безопасность полета.
Технические результаты от использования изобретения сводятся к следующему.
1. Вся минимально необходимая летчику навигационно-пилотажная информация представлена в виде имеющих физический смысл хорошо понятных графических образов полета и позволяет:
- не заниматься перекодированием цифро-шкальной информации в образ полета;
- успешно прогнозировать летчику свои дальнейшие действия на продолжительный отрезок времени и непрерывно контролировать свое положение в пространстве и относительно траектории;
- быстро и правильно принимать решения в сложной обстановке;
- рационально строить маневр выхода на траекторию с использованием предельных возможностей ЛА, не вступая при этом в противоречие с ранее сформировавшейся манерой управления ЛА при визуальном пилотировании.
2. За счет использования преследующего слежения с прогнозированием обеспечивается:
- высокая степень осознанности управления ЛА с привитием правильных моторных навыков;
- высокая точность реализации сложных пространственных траекторий и выхода в заданное место на траектории в заданное время за счет точного выдерживания задаваемой скорости (решение задачи четырехмерной навигации);
- рациональное распределение внимания датчика (его рабочей нагрузки) по мере приближения к конечной цели датчика, что существенно снижает утомляемость и вероятность впадения в доминантное состояние;
- полное исключение неопределенности в управлении, так как в любой момент времени летчику понятно, в каком направлении ему необходимо лететь.
3. Ограничение, наложенное непосредственно на управляемый подвижный индекс - силовой вектор, и сам вектор обеспечивают:
- наиболее быстрое и своевременное вмешательство датчика в управление при возникновении угрозы безопасности полета, включая отказы техники, повреждения ЛА и внешние возмущения;
- полное освобождение летчика от запоминания всей совокупности эксплуатационных ограничений.
Указанные технические результаты достигаются тем, что в способе пилотирования ЛА по задаваемой траектории с задаваемой скоростью, включающем задание траектории, определение положения и параметров движения ЛА в пространстве для формирования на экране электронного индикатора подвижного индекса, наводимого датчиком посредством отклонения рычагов управления в задаваемую точку экрана, подвижный индекс представлен в виде ограниченного отрезком вектора, получаемого на основе информации о действующей на ЛА результирующей силы и скорости полета, начинающегося от точки, показывающей направление полета ЛА в виде треугольного силуэта и оканчивающегося окружностью изменяемого диаметра в зависимости от заданной и текущей скоростей, а также тенденций их изменения, при этом после снятия летчиком усилий с ручки управления и ее возврата в нейтральное положение ЛА самостоятельно выходит на направление полета, указанное концом вектора в момент снятия усилий, рекомендуемая точка наведения конца вектора изображается крестом изменяемого размера в зависимости от заданной скорости полета, двигающимся впереди ЛА на расстоянии, определяемом скоростью полета и допустимой перегрузкой, по задаваемой траектории в виде линий в пространстве, соединенной вертикальными отрезками со своей проекцией на горизонтальную плоскость.
Таким образом, в известный способ пилотирования введен ряд существенных дополнений. Прежде всего основной управляемый подвижный индекс выполнен в виде вектора 1 и физически имеет векторный смысл, так как формируется на основе информации о действующей на ЛА результирующей силы (имеющей направление и величину) и скорости полета. Кроме того, векторное представление эргономически обосновано, так как в этом случае человек способен лучше воспринимать тенденции изменения подвижного индекса (т.е. высшие производные отклонений индекса). В этом случае отклик вектора на отклонение рычагов получается наиболее быстрым. Особенность динамики поведения ЛА с использованием системы автоматизированного управления заключается в том, что после снятия датчиком усилий с ручки управления и ее возврата под действием загрузочного механизма в нейтральное положение в процессе завершения переходного процесса ЛА асимптотически выходит на направление полета, указанное концом вектора в момент снятия усилий. Все ограничения, накладываемые на движение ЛА пространстве, приведены к ограничению вектора отрезком 2. Вектор характеризует направление искривления траектории полета и поэтому начинается от точки, показывающей направление полета ЛА, т.е. от направления вектора скорости ЛА в пространстве 3. С этой точкой совмещен силуэт ЛА (вид сзади на ЛА вдоль вектора скорости), изображаемый треугольником 4 (по аналогии с изображением треугольного крыла ЛА). Вектор оканчивается окружностью изменяемого диаметра 5 в зависимости от заданной и текущей скоростей полета, а также тенденций их изменения. С увеличением скорости кольцо как бы удаляется и окружность 5 соответственно уменьшается в диаметре. Для пилотирования ЛА летчик отклоняет рычаги управления и старается навести конец вектора в виде окружности 5 на крест 6 и окаймить его ею. Размеры креста зависят от заданной скорости полета по траектории, а сам он движется по траектории впереди ЛА на расстоянии, определяемом скоростью полета и допустимой перегрузкой ЛА на этой скорости, т.е. исходя из предельных маневренных возможностей ЛА. Сама траектория изображается линией в пространстве 7, соединенной вертикальными отрезками со своей проекцией 9 на горизонтальную плоскость 8, которая может быть расположена на различной высоте от земли.
По своему физическому смыслу изобретение напоминает широко известный способ наведения ЛА по "кривой погони". Отличие заключается в том, что в движущуюся точку нацеливается не вектор скорости, а вектор прогнозируемой траектории движения ЛА.
На чертеже представлен вид экрана кабинного электронного индикатора для реализации предлагаемого способа пилотирования ЛА: 1 - силовой вектор; 2 - ограничение на вектор 1; 3 - направление полета ЛА; 4 - силуэт ЛА (вид сзади); 5 - окружность изменяемого диаметра; 6 - крест изменяемых размеров; 7 - задаваемая траектория; 8 - горизонтальная плоскость; 9 - проекция траектории 7 на горизонтальную плоскость 8.
Изобретение может быть использовано на всех этапах полета для различных типов ЛА. При этом наиболее успешно на вертолетах, самолетах вертикального взлета и посадки, самолетов с отклонением вектора тяги, с изменяемым профилем крыла, энергетическими средствами создания сил, т.е. на ЛА, имеющих органы непосредственного управления силами.
Наиболее просто показать возможность реализации изобретения при выполнении ЛА захода на посадку. В этом случае в качестве задаваемой траектории выбирается определенная схема захода на посадку, при этом необходимо прибыть в аэропорт в заданное время, для чего необходимо выдерживать определенную скорость. Итак:
1. Траектория полета может быть жестко задана перед взлетом, передаваться на борт с земли или рассчитана непосредственно на борту.
2. Если ЛА находится далеко от задаваемой траектории, то летчик летит к выбранному им (или рекомендуемому ему с земли) участку траектории, например, в район четвертого разворота при заходе на посадку. Для этого летчик нацеливает кольцо 5 на этот участок траектории.
3. На определенной дальности от траектории появляются два креста, которые двигаются по ней в разные стороны. Летчик выбирает необходимое направление движения по траектории (один из крестов) и активным разворотом старается дотянуться концом вектора (окружностью) до креста, не превышая при этом ограничивающего вектор отрезка 2. Если датчик будет пересекать вектором 1 крест 6, то выход на траекторию ускорится, однако в дальнейшем это может привести к ухудшению точности.
4. Окаймляя окружностью 5 крест 6, летчик обеспечивает как рациональный выход на траекторию, так и точное движение по ней с заданной скоростью, тем самым обеспечивая выход ЛА в заданное место в заданное время, например, касание ВПП в заданное время. Так, если крест 6 увеличивается в размере (как бы приближаясь к ЛА), значит, заданная скорость полета по траектории уменьшается. Если окружность 5 увеличивается в размере и становится больше креста 5, значит, имеет место тенденция к падению скорости ниже заданной и для ее прекращения необходимо увеличить тягу перемещением РУДа, до тех пор, пока размеры окружности 5 и креста 6 не сравняются. Превышение окружностью 5 отрезка 2 является недопустимым по условиям безопасности полетов.
5. В случае непредвиденных обстоятельств для сокращения времени захода на посадку летчик может лететь на участок траектории в район дальнего привода и с успехом выполнить рациональный маневр выхода на глиссаду.
Использование изобретения для выполнения захода на посадку может существенно уменьшить размеры воздушного пространства в зоне аэродрома, уменьшить расход топлива и увеличить пропускную способностью ВПП при одновременном выполнении всех требований безопасности полетов.
Для внедрения изобретения не требуется затрат, связанных с установкой на борту дополнительного оборудования (если на борту имеется хотя бы один электронный индикатор - на лобовое стекло или кабинный), бортовая вычислительная машина, инерциальная система, система спутниковой навигации и другие типовые системы, установленные на всех современных ЛА. В будущем предполагается переход от псевдообъемного цветного изображения к изображению с использованием стереоскопического эффекта.
Кроме того, изобретение может эффективно применяться не только на борту ЛА, но и в наземных пунктах управления, а также для дистанционного пилотирования ЛА.
Результаты сравнительной оценки в полунатурных исследованиях аналога и изобретения сводятся к следующему.
1. Летный состав отдает предпочтение изобретению.
2. Резервы внимания летчика увеличиваются в 2 - 3 раза с одновременным повышением точности пилотирования в 2 раза.
3. Более чем в 3 раза расширяется область возможных выходов на траекторию при фиксированной точки выхода на траекторию.
4. Снижается вероятность превышения эксплуатационных ограничений, увеличивается вероятность парирования отказов техники, повреждений ЛА и внешних возмущений.
5. Возрастает возможность благополучного завершения полета при одновременном воздействии нескольких опасных факторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНЫЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ ДИСПЛЕЙ | 1991 |
|
RU2014250C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| СПОСОБ КИНЕСТАТИЧЕСКОЙ ПЕРЕДАЧИ ЛЕТЧИКУ ПИЛОТАЖНОЙ ИНФОРМАЦИИ | 1996 |
|
RU2095279C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ РАЗДЕЛЬНОГО УПРАВЛЕНИЯ БОКОВЫМ И ВЕРТИКАЛЬНЫМ ТРАЕКТОРНЫМ ДВИЖЕНИЕМ ЛА | 1998 |
|
RU2141624C1 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ЗАХОДА НА ПОСАДКУ | 2008 |
|
RU2364943C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
Способ предназначен для решения летчиком пилотажно-навигационных задач на всех типах летательных аппаратов (ЛА). От технической реализации изобретения следует ожидать повышения безопасности полета и точности пилотирования с одновременным снижением нагрузки на летчика. Пилотирование ЛА осуществляется преследующим слежением с прогнозированием путем использования хорошо понятных летчику графических образов полета. Подвижной индекс представлен в виде органического отрезка вектора, получаемого на основе информации о действующей на ЛА результирующей силы и скорости полета. Рекомендуемая точка наведения конца вектора изображается крестом изменяемого размера в зависимости от задаваемой скорости полета, движущимся впереди ЛА в виде треугольного силуэта на расстоянии, определяемом скоростью полета и допустимыми перегрузками. Траектория представлена в виде линии в пространстве, соединенной вертикальными отрезками со своей проекцией на горизонтальную плоскость. 1 ил.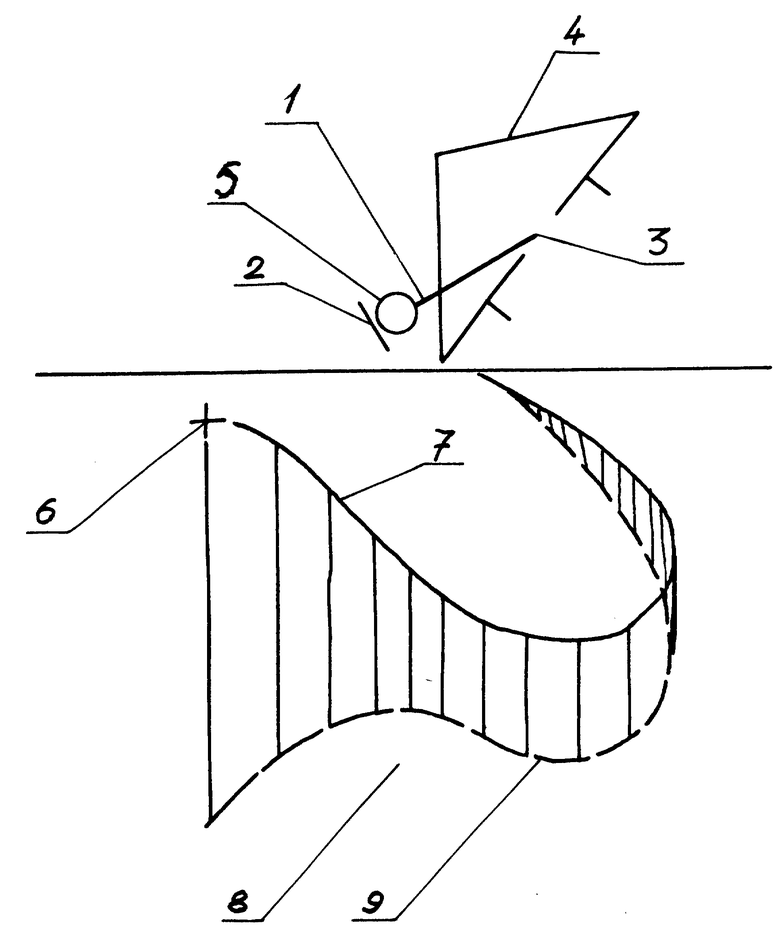
Способ пилотирования летательного аппарата по задаваемой траектории, включающий задание траектории, определение положения и параметров движения летательного аппарата в пространстве для формирования на экране электронного индикатора подвижного индекса, совмещаемого летчиком посредством отклонения рычагов управления с задаваемой точкой на экране, отличающийся тем, что представляют подвижный индекс в виде треугольника, изображающего летательный аппарат при виде на него сзади вдоль вектора скорости и начинающегося от него вектора изменяемой длины, на конце которого расположена окружность изменяемого диаметра, причем ограничение на длину вектора изображается отрезком, изображают задаваемую траекторию полета в виде линии в пространстве, соединенной вертикальными отрезками со своей проекцией на горизонтальную плоскость, при этом задаваемую точку экрана изображают в виде креста, движущегося по задаваемой траектории, причем размер креста зависит от задаваемой скорости полета, совмещают подвижный индекс с задаваемой точкой экрана посредством окаймления креста окружностью вектора, при этом при снятии усилия с ручки управления обеспечивают движение летательного аппарата в направлении, указанном концом вектора.
| Браславский Д.А | |||
| и др | |||
| Авиационные приборы и автоматы | |||
| - М.: Машиностроение, 1978, с.407-408 | |||
| Бородин В.Т | |||
| и др | |||
| Пилотажные комплексы и системы управления самолетов и вертолетов | |||
| - М.: Машиностроение, 1978, с.151-157 | |||
| Методы инженерно-психологических исследований в авиации | |||
| Под ред.Ю.П.Доброленского.- М.: Машиностроение, с.64-80 | |||
| US 3538881 A, 10.11.70 | |||
| Способ поглощения сероводорода из газов | 1938 |
|
SU64351A1 |
| СПОСОБ ВЫРАБОТКИ КОНСЕРВОВ "РЫБНЫЕ КОТЛЕТЫ В ТОМАТНОМ СОУСЕ" | 2011 |
|
RU2458531C1 |
