Изобретение относится к области систем и средств управления воздушным движением, в частности к пилотажно-навигационному и радиотехническому оборудованию и предназначено для установки на летательных аппаратах (ЛА) и на земле в районе аэродрома для обеспечения посадки ЛА и наблюдения за ними.
Известна спутниковая система посадки летательных аппаратов (ЛА), состоящая из спутниковой навигационной системы (СНС), бортовой части ЛА, содержащей бортовую аппаратуру потребителей (АП) СНС, последовательно соединенные систему автоматического управления и устройство контроля, а также бортовой терминал связи, наземной части, содержащей наземную АП СНС, выход которой подключен ко входу наземного вычислителя-контроллера, соединенного с наземным терминалом связи (см., например, "Глобальная спутниковая радионавигационная система" под ред. В.Н. Харисова и др., М., ИПРЖР, 1998, с. 162-184).
Наиболее близким к заявленному техническому решению является спутниковая система посадки летательных аппаратов (ЛА), состоящая из спутниковой навигационной системы (СНС), бортовой части ЛА, содержащей бортовую аппаратуру потребителей (АП), СНС, выход которой соединен со входом вычислителя параметров посадочной траектории, другой вход которой соединен с выходом бортового терминала связи, а также последовательно соединенные систему автоматического управления и устройство контроля, и наземной части, содержащей первую АП СНС и вторую АП СНС, размещенные в начале взлетно-посадочной полосы (ВПП) и на продолжении ее оси соответственно, наземный вычислитель-контроллер, соединенный двусторонней связью с наземным терминалом связи, и контрольно-диспетчерский пункт, выход которого соединен с соответствующим входом наземного терминала связи (см., например, Свидетельство РФ N 9651, G 01 S 1/10, 3/02, 1998 г.).
Недостатком известной системы является недостаточно точное определение навигационных параметров посадки ЛА, вследствие неполной компенсации систематических, медленно меняющихся погрешностей оценки навигационных параметров и невозможность обеспечения функции наблюдения ЛА.
Преимущество предложенной системы заключается в повышении точности определения навигационных параметров посадки ЛА за счет более полной компенсации систематических, медленно меняющихся погрешностей оценки навигационных параметров и в расширении функциональных возможностей.
Техническая задача в заявленном предложении решается за счет введения третьего опорного пункта, содержащего третью АП СНС, которая совместно с двумя остальными обеспечивает создание связанной с взлетно-посадочной полосой (ВПП) местной прямоугольной декартовой системы координат, с помощью которой при вычислении параметров посадки происходит наиболее полная компенсация систематических, медленно меняющихся погрешностей, а также за счет введения вычислителя навигационных параметров системы наблюдения и кодирующего устройства, что обеспечивает наблюдение за ЛА.
При этом в спутниковой системе посадки летательных аппаратов (ЛА), состоящей из спутниковой навигационной системы СНС, бортовой части ЛА, содержащей бортовую аппаратуру потребителей (АП) СНС, выход которой соединен со входом вычислителя параметров посадочной траектории, другой вход которой соединен с выходом бортового терминала связи, а также последовательно соединенные систему автоматического управления и устройство контроля, и наземной части, содержащей первую АП СНС и вторую АП СНС, размещенные в начале взлетно-посадочной полосы (ВПП) и на продолжении ее оси соответственно, наземный вычислитель-контроллер, соединенный двусторонней связью с наземным терминалом связи и контрольно-диспетчерский пункт, выход которого соединен с соответствующим входом наземного терминала связи, в бортовую часть ЛА между выходом бортовой АП СНС и входом системы автоматического управления введены последовательно соединенные вычислитель параметров опорной траектории и вычислитель отклонений, выход вычислителя параметров посадочной траектории соединен с другим входом вычислителя отклонений, а выход бортового терминала связи соединен с другим входом вычислителя параметров опорной траектории, в наземную часть введены третья АП СНС, размещенная на перпендикуляре к оси ВПП, вычислитель направляющих косинусов, при этом выходы первой, второй и третьей АП СНС соединены с соответствующими входами вычислителя направляющих косинусов, выход которого соединен с соответствующим входом наземного вычислителя-контроллера, причем между соответствующим выходом наземного вычислителя-контроллера и входом контрольно-диспетчерского пункта введены последовательно соединенные вычислитель навигационных параметров системы наблюдения и кодирующее устройство, причем контрольно-диспетчерский пункт выполнен на последовательно соединенных аппаратуре обработки координат и угловой информации и аппаратуре отображения, выход которой соединен двухсторонней связью с диспетчерским постом.
На фиг. 1 предложена функциональная схема спутниковой системы посадки ЛА, где спутниковая навигационная система (СНС) - 1, бортовая часть ЛА - 2, бортовая аппаратура потребителей (АП) СНС - 3, вычислитель - 4 параметров посадочной траектории, вычислитель - 5 параметров опорной траектории, вычислитель отклонений - 6, система автоматического управления - 7, устройство контроля - 8, бортовой терминал связи - 9, наземная часть - 10, первая, вторая и третья АН СНС - 11, 12 и 13, вычислитель - 14 направляющих косинусов, наземный вычислитель-контроллер - 15, вычислитель - 16 навигационных параметров системы наблюдения, наземный терминал связи - 17, кодирующее устройство - 18, контрольно-диспетчерский пункт - 19, аппаратура обработки координат и угловой информации - 20, аппаратура отображения - 21, диспетчерский пост - 22.
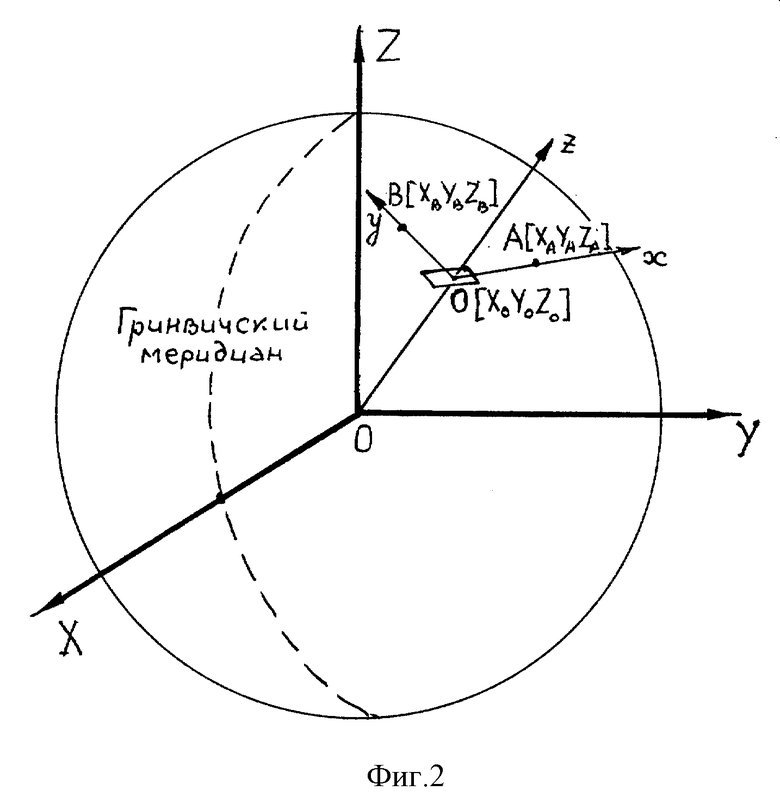
На фиг. 2 представлены системы координат, используемые в данном предложении.
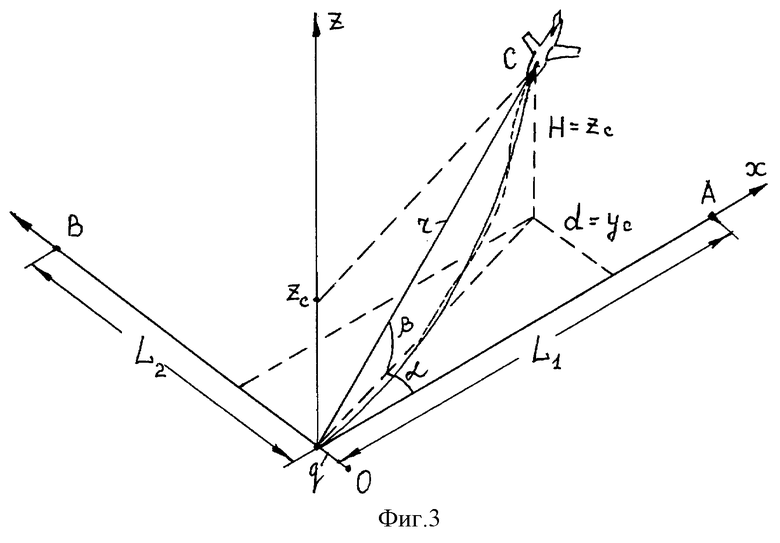
На фиг. 3 представлена геометрия спутниковой системы посадки ЛА и измеряемые навигационные параметры, где кривая 1, показанная непрерывной линией, является опорной траекторией, а кривая 2, показанная пунктиром, является траекторией посадки ЛА.
Спутниковая система посадки ЛА работает следующим образом.
На летном поле аэродрома (ВПП) в точке О, смещенной на некоторое небольшое расстояние q от оси ВПП (чтобы не создавать помехи процессу посадки), которое в дальнейшем может быть учтено в расчетах, размещается первая позиция АП СНС 11 (О), на продолжении оси ВПП на базовом расстоянии L1 в точке A размещается вторая АП СНС 12 (A), а на перпендикуляре к базовой линии L1 в точке В, удаленной от точки O на расстояние L2, размещается третья АП СНС 13 (В). На борту ЛА в точке C размещается бортовая АП СНС 3 (C) - см. фиг. 3. Базовое расстояние L1 определяет ось Оx, базовое расстояние L2 - ось Оy, которые в совокупности образуют плоскость Оxy местной декартовой системы координат. Перпендикуляр к ней в точке O - Oz образует третью (недостающую) ось - см. фиг. 2.
Таким образом, имеются две правые декартовы системы координат:
OXYZ - геоцентрическая инерциальная прямоугольная система координат, в которой производится отсчет координат точек размещения АП СНС и работают навигационные спутники,
Oxyz - местная прямоугольная декартова система координат, топопривязанная к ВПП, в которой производится отсчет всех элементов посадки.
Пересчет из одной системы в другую производится с использованием оператора пересчета, содержащего направляющие косинусы осей Оx, Оy, Oz (см., например, Г.Корн, Т.Корн, Справочник по математике, М., 1968 г., с. 76-77):
x = K1(X-Xо) + K2(Y-Yо) + K3(Z-Zо), (1)
y = K4(X-Xо) + K5(Y-Yо) + K6(Z-Zо), (2)
z = K7(X-Xо) + K8(Y-Yо) + K9(Z-Zо), (3)
где XоYоZо - координаты точки О, измеренные АП СНС в системе координат OXYZ;
K1, K2, K3 - направляющие косинусы (НК) оси Оx относительно системы координат OXYZ;
K4, K5, K6 - НК оси Оy относительно системы координат OXYZ;
K7, K8, K9 - НК оси Oz относительно системы координат OXYZ.
Направляющие косинусы осей координат Оx и Оy определяются по следующим соотношениям с использованием измерений, полученных АП СНС 11, 12, 13 в точках О, A, B соответственно:
где XA, YA, ZA - координаты точки A,
XB, YB, ZB - координаты точки B.


Направляющие косинусы оси Oz - K7, K8, K9 могут быть определены по известным K1, K2....K6, исходя из условий ортогональности.
В результате НК оси Oz определяется как:
где
M = N2 + Q2 + 1 (17)
В соответствии с изложенным в опорных точках системы О, A и B аппаратурой потребителей (АП) СНС 11, 12, 13 соответственно производятся измерения координат этих точек в системе координат OXYZ, которые привязываются к моментам времени измерений. В качестве шкалы времени могут быть использованы метки времени спутниковой навигационной системы, содержащиеся на выходе практически всех выпускаемых в настоящее время модификаций АП СНС. С выхода первой АП СНС 11 (O) непосредственно, а с выхода второй АП СНС 12 (А) и третьей АП СНС 13 (B) через линии связи информация поступает в вычислитель 14. В последнем, согласно выражениям (4)-(17), вычисляются значения K1-K9, которые затем поступают в наземный вычислитель-контроллер 15.
В последнем формируется сообщение: координаты Xо, Yо, Zо и направляющие косинусы K1-K9, привязанные ко времени, которые с определенной периодичностью поступают через наземный и бортовой терминалы связи 17 и 9 на борт заходящего на посадку ЛА. Информация с выхода бортового терминала связи 9 параллельно поступает на вход вычислителя 4 и вход вычислителя 5. Одновременно на другие входы упомянутых вычислителей поступает информация с выхода бортовой АП СНС 3 (C). В вычислителе 4 вычисляются навигационные параметры траектории посадки d, H, r в системе координат Oxyz, в которой осуществляется посадка ЛА, в соответствии со следующими соотношениями:
d = yc (18)
H = zc (19)
где, согласно (1)-(3):
Xc=K1(Xc-Xo)+K2(Yc-Yo)+ K3(Zc-Zo), (21)
yc=K4(Xc-Xo)+K5(Yc-Yo)+ K6(Zc-Zo), (22)
zc=K7(Xc-Xo)+K8(Yc-Yo)+ K9(Zc-Zo). (23)
Параллельно в вычислителе 5 с использованием информации бортовой АП СНС 3, информации о направляющих косинусах и начале наземной системы координат Oxyz, производится формирование текущих параметров опорной траектории - dо, Hо, rо (см. фиг. 3). В первом случае они могут быть рассчитаны заранее для целого ряда траекторий и заложены в память вычислителя 5. Информация с выхода бортовой АП СНС 3 используется в этом случае для выбора наиболее близкой и наиболее рациональной траектории посадки из набора уже рассчитанных. Во втором случае в вычислитель 5 закладывается программа, по которой формируется опорная траектория посадки, а информация с выхода бортовой АП СНС 3 используется в качестве начальных условий для завязки траектории. С выхода вычислителей 4 и 5 информация поступает в вычислитель отклонений 6, в котором соответствующие параметры посадочной (d, H, r) и опорной (dо, Hо, rо) траекторий сравниваются, в результате чего формируются отклонения Δ H и Δ d, которые поступают на отработку в систему автоматического управления 7 и устройство контроля 8. Предложенное техническое решение обеспечивает существенное повышение точности. Действительно, используемые при расчетах навигационных параметров посадки выражения (1)-(23) содержат только разности измеряемых координат, снимаемых с выходов АП СНС, вследствие чего полностью реализуется эффект компенсации и достигаются максимально возможные точностные характеристики.
Проведенные оценки показывают, что выбор базовых расстояний L1 и L2 влияет на точностные характеристики системы. Так, например, если положить, что остаточные нескомпенсированные погрешности приемников АП СНС составляют величины порядка 1 м (1 σ), погрешности многолучевости антенн - 1 м, то при L1, равном 5-10 км, и L2, равном 5 км, обеспечиваются точностные характеристики не хуже первой категории метеоминимума ИКАО.
Предлагаемая система посадки не имеет ограничений на размеры сектора зоны захода на посадку и посадки ЛА, в том числе обеспечивает сектор, равный или превосходящий по размерам сектор системы MLS (±40o) (см., например, П.В. Олянюк и др. Радионавигационные устройства и системы гражданской авиации, М. , Транспорт, 1983 г., c. 296-310). При этом в отличие от MLS обеспечиваются аналогичные характеристики при заходе на посадку и с обратного конца ВПП при использовании одного и того же комплекса аппаратуры.
Точностные характеристики не зависят от состояния подстилающей поверхности, а при развертывании системы нет необходимости проводить большой объем геодезических работ, необходимо лишь провести топопривязку точек размещения наземных навигационных маяков О, A, B относительно ВПП.
Суть технического решения в части расширения функциональных возможностей основана на специфической особенности структуры предлагаемой системы, при которой система посадки реализуется при сборе и обработке информации на борту, а система наблюдения - при сборе и обработке информации на Земле.
Функционирование рассматриваемой системы при наблюдении заходящего на посадку и совершающего посадку ЛА происходит следующим образом. Координаты ЛА с выхода бортовой АП СНС 3, измеренные в геоцентрической системе координат - Xc, Yc, Zc и привязанные к меткам времени, через бортовой и наземный терминалы связи 9 и 17 соответственно поступают через наземный вычислитель-контроллер 15 совместно с информацией с выхода вычислителя 14 направляющих косинусов и начала системы координат XoYoZo на вычислитель 16 навигационных параметров системы наблюдения. В последнем вычисляются навигационные параметры, в которой работает система наблюдения за заходящими на посадку и совершающими посадку ЛА с использованием, например, радиолокатора посадки (Н. Т. Тучков. "Автоматизированные системы и радиоэлектронные средства управления воздушным движением". М., Транспорт, 1994 г., с. 163) - см. фиг. 3.
В последнем вычисляются те навигационные параметры системы наблюдения, которые поступали от радиолокатора посадки, т.е. α, β, r. B вычислителе 16 эти параметры вычисляются в системе координат Oхyz следующим образом:
α = arctg(yc/xc), (25)
β = arcsin(zc/r), (26)
где Xc, Уc, Zc -определяются по выражениям (21)-(23).
С выхода вычислителя 16 они поступают на кодирующее устройство 18, в котором они перекодируются в последовательные коды и смешиваются с дополнительной информацией так, как это было принято при работе с радиолокатором посадки.
Далее информация с выхода кодирующего устройства 18 поступает на контрольно-диспетчерский пункт 19, в составе которого находятся последовательно соединенные аппаратура обработки координат и угловой информации 20 и аппаратура отображения 21. В аппаратуре обработки координат и угловой информации 20 информация приводится к виду, необходимому для правильной работы аппаратуры отображения 21. С аппаратурой отображения 21 работает диспетчерский пост 22, связанный с ней линиями двусторонней связи, а другой выход диспетчерского поста 22 через наземный и бортовой терминалы связи 17 и 9 соответственно подключен к вычислителю 5 параметров опорной траектории. По этой линии связи диспетчерский пост 22 может осуществлять завязку наиболее выгодной опорной траектории и управлять процессом посадки ЛА. Работа диспетчерского поста 22 осуществляется по принятым правилам и протоколам. Работа в режиме наблюдения ЛА осуществляется с той же высокой точностью, как и работа в режиме посадки, что является проблематичным при использовании в качестве датчика навигационных параметров наблюдения радиолокатора посадки. Таким образом, происходит расширение функциональных возможностей системы посадки, или интегрирование функций двух аэродромных систем в одной системе и существенная экономия оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
Изобретение относится к системам и средствам управления воздушным движением, в частности к пилотажно-навигационному и радиотехническому оборудованию и предназначено для установки на летательных аппаратах (ЛА) и на земле в районе аэродрома для обеспечения посадки ЛА и наблюдения за ними. Спутниковая система посадки летательных аппаратов состоит из спутниковой навигационной системы СНС, бортовой части ЛА, содержащей бортовую аппаратуру потребителей (АП) СНС, вычислитель параметров посадочной траектории, бортовой терминал связи, а также последовательно соединенные систему автоматического управления и устройство контроля, и наземной части, содержащей первую АП СНС и вторую АП СНС, размещенные в начале взлетно-посадочной полосы (ВПП) и на продолжении ее оси соответственно, наземный вычислитель-контроллер, наземный терминал связи и контрольно-диспетчерский пункт, при этом в бортовой части ЛА между выходом бортовой АП СНС и входом системы автоматического управления введены последовательно соединенные вычислитель параметров опорной траектории и вычислитель отклонений, в наземную часть введены третья АП СНС, размещенная на перпендикуляре к оси ВПП, вычислитель направляющих косинусов, а между соответствующим выходом наземного вычислителя-контроллера и входом контрольно-диспетчерского пункта введены последовательно соединенные вычислитель навигационных параметров системы наблюдения и кодирующее устройство, причем контрольно-диспетчерский пункт выполнен на последовательно соединенных аппаратуре обработки координат и угловой информации и аппаратуре отображения, выход которой соединен двусторонней связью с диспетчерским постом. Технический результат заключается в повышении точности определения навигационных параметров посадки летательных аппаратов. 1 з.п.ф-лы, 3 ил.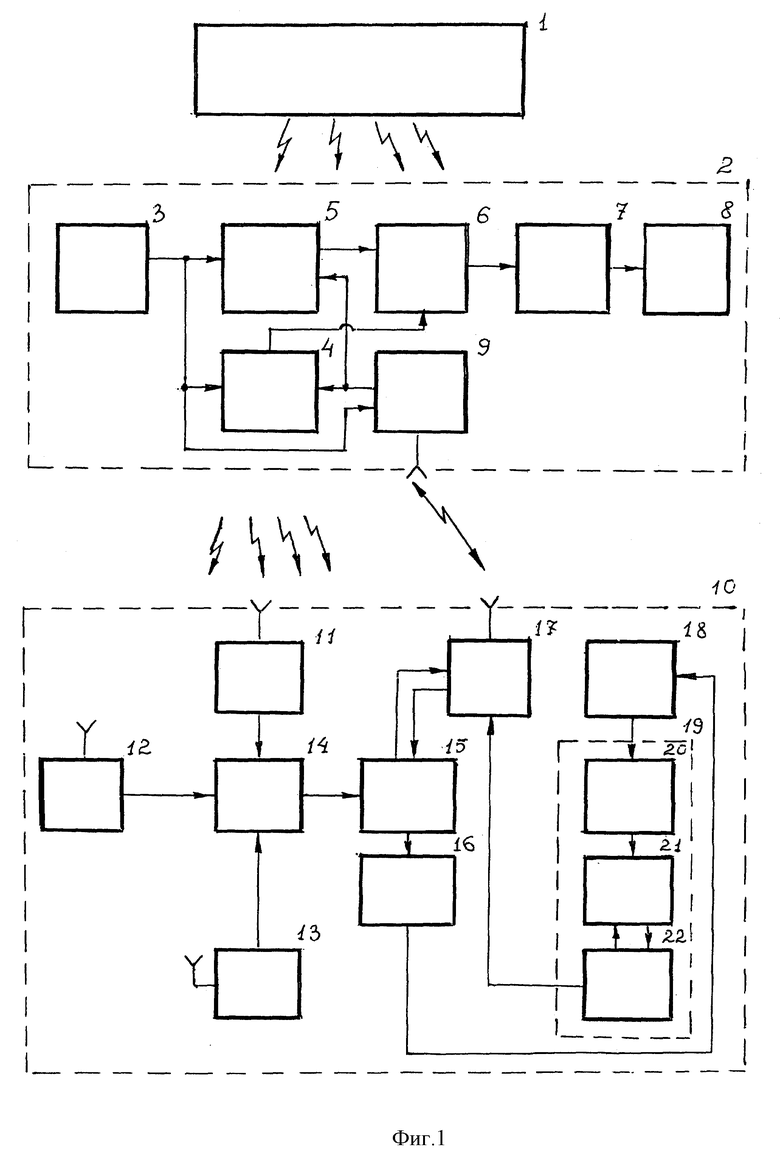
| Тормозное устройство для железнодорожных вагонеток | 1928 |
|
SU9651A1 |
| US 4866450 A, 12.09.1989 | |||
| US 5017930 A, 21.05.1991 | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| КОЛЛЕКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ПОСТОЯННОГОТОКА | 0 |
|
SU273326A1 |
