Изобретение относится к спутниковым радионавигационным системам позиционирования, в частности к определению, прогнозированию или корректировке эфемеридных данных.
Известно техническое решение (1 аналог) определения эфемеридной информации (ЭИ) навигационного космического аппарата (НКА) GPS [Яценко В.С. «Основы спутниковой навигации». Системы GPS NAVSTAR и ГЛОНАСС, Москва, "Горячая линия-Телеком", 2005, стр. 153-225], состоящее из НКА, сети станций слежения, астрофизических и метеорологических КА, сети передающих антенн и аппаратуры потребителя. Координаты каждой приемной станции определены с очень высокой точностью. Сигнал от НКА принимается станциями слежения. Поскольку заранее известны точные координаты приемных станций, по времени прохождения сигнала от НКА до станции вычисляются так называемые псевдодальности и рассчитывается точное положение НКА на орбите. Измеренные данные передаются в главную управляющую станцию. На этой станции осуществляется сбор и окончательная обработка данных, полученных от остальных наземных станций. Сколь бы ни были точны данные, получаемые от наземных станций слежения, они имеют свои погрешности, но благодаря некоторой избыточности данных и последующей математической обработке значительную часть погрешностей удается скомпенсировать. Кроме основных данных со станции слежения, на главную станцию поступают данные от астрофизических и метеорологических КА. В результате обработки полученной информации вычисляются новые эфемериды НКА (данные о положении НКА на орбите), характеризуемые параметрами: средняя аномалия М0; эксцентриситет е; корень квадратный из большой полуоси орбиты  ; долгота восходящего узла Ω0; наклонение орбиты i0; аргумент перигея ω. Затем на основании обработанных данных составляется прогноз параметров орбиты в фиксированные (опорные) моменты времени вплоть до выработки следующего прогноза. На основе полученного прогноза в вычислителе главной станции рассчитываются дополнительные параметры эфемерид по методу наименьших квадратов, а именно: коэффициентов вековых уходов: возмущенное значение среднего движения Δn и скорости ухода восходящего узла орбиты
; долгота восходящего узла Ω0; наклонение орбиты i0; аргумент перигея ω. Затем на основании обработанных данных составляется прогноз параметров орбиты в фиксированные (опорные) моменты времени вплоть до выработки следующего прогноза. На основе полученного прогноза в вычислителе главной станции рассчитываются дополнительные параметры эфемерид по методу наименьших квадратов, а именно: коэффициентов вековых уходов: возмущенное значение среднего движения Δn и скорости ухода восходящего узла орбиты  и ее наклонения
и ее наклонения  а также амплитуд синусной и косинусной гармоник удвоенной невозмущенной частоты обращения, которыми аппроксимируются три составляющие возмущения относительно невозмущенной орбиты: вдоль орбиты Сuc, Сus; по геоцентрическому радиусу Срс, Срs; по боковому уклонению Сiс, Сis. Один раз в сутки эфемериды загружаются на НКА при помощи сети наземных передающих антенн, расположенных по всему миру, а затем в виде навигационного сообщения передаются потребителям. Зная точные координаты НКА в опорные моменты времени, потребитель может вычислить координаты НКА в произвольный момент времени. Рассмотренное устройство позволяет вычислять эфемериды НКА в произвольный момент времени с точностью 40-60 см при 4-часовом интервале передачи опорных эфемерид потребителю с НКА. Данная точность не удовлетворяет перспективным требованиям к спутниковым системам (15 см с вероятностью 0,95), что является недостатком.
а также амплитуд синусной и косинусной гармоник удвоенной невозмущенной частоты обращения, которыми аппроксимируются три составляющие возмущения относительно невозмущенной орбиты: вдоль орбиты Сuc, Сus; по геоцентрическому радиусу Срс, Срs; по боковому уклонению Сiс, Сis. Один раз в сутки эфемериды загружаются на НКА при помощи сети наземных передающих антенн, расположенных по всему миру, а затем в виде навигационного сообщения передаются потребителям. Зная точные координаты НКА в опорные моменты времени, потребитель может вычислить координаты НКА в произвольный момент времени. Рассмотренное устройство позволяет вычислять эфемериды НКА в произвольный момент времени с точностью 40-60 см при 4-часовом интервале передачи опорных эфемерид потребителю с НКА. Данная точность не удовлетворяет перспективным требованиям к спутниковым системам (15 см с вероятностью 0,95), что является недостатком.
Известно техническое решение (2 аналог) определения эфемеридной информации НКА ГЛОНАСС [Яценко В.С. «Основы спутниковой навигации». Системы GPS NAVSTAR и ГЛОНАСС, Москва, "Горячая линия-Телеком", 2005, стр.42, 111-152], состоящее из НКА, из главной станции, совмещенной с вычислительным центром, группы контрольно-измерительных станций (КИС), связанных с главной станцией и между собой каналами связи, и аппаратуры потребителя. Координаты КИС (фазового центра антенны) определены в трех измерениях с максимально доступной точностью. При полете НКА в зоне видимости КИС она осуществляет наблюдение за спутником, принимает навигационные сигналы, осуществляет первичную обработку информации и производит обмен данными с главной станцией. На главной станции происходит сбор информации от всех КИС, ее математическая обработка и вычисление вектора состояния навигационного спутника, характеризуемого координатами x, y, z и скоростями Vx, Vy, Vz в геоцентрической гринвичской прямоугольной системе координат. Затем на основании обработанных данных составляется прогноз параметров орбиты в фиксированные (опорные) моменты времени с шагом 15 минут, включая постоянные на 30-минутном интервале ускорения, описывающие гравитационное воздействие Луны и Солнца. Один раз в сутки эфемериды загружаются на НКА при помощи передающих антенн сети КИС, а затем в виде навигационного сообщения передаются потребителям. Зная точные координаты НКА в опорные моменты времени, потребитель может вычислить координаты НКА в произвольный момент времени путем интегрирования уравнений модели движения НКА [Интерфейсный контрольный документ ГЛОНАСС (редакция 5.1), Москва, 2008, стр. 56-62]. Рассмотренное устройство позволяет вычислять эфемериды НКА в произвольный момент времени с метровой точностью при 30-минутном интервале передачи опорных эфемерид потребителю с НКА. Данная точность не удовлетворяет перспективным требованиям к спутниковым системам (15 см с вероятностью 0,95), как не удовлетворяет им и величина интервала прогнозирования, что является недостатком.
Рассмотренное последним техническое решение (аналог 2) является наиболее близким аналогом к заявленному предложению по совокупности существенных признаков и достигаемому результату и выбрано в качестве прототипа для заявленного способа и устройства.
Техническим результатом изобретения является повышение точности расчета ЭИ в аппаратуре потребителя до 10-15 см и достижение возможности её закладки в аппаратуру со спутника не чаще чем раз в 4 часа.
Сущность предлагаемого изобретения заключается в том, что в вычислительном центре главной КИС не требуется прогнозировать 6 параметров вектора состояния НКА x, y, z, Vx, Vy, Vz, а достаточно только прогноза его координат x, y, z. Также сущность изобретения заключается во введении в вычислительный центр главной станции КИС вычислителя согласованной ЭИ вида:
х, у, z, Vx, Vy, Vz, аx0, аx1, аx2, аx3, аy0, аy1, аy2, аy3, аz0, аz1, аz2, аz3,
где аx0, аx1, аx2, аx3, аy0, аy1, аy2, аy3, аz0, аz1, аz2, аz3 - параметры ускорений, представленных в виде кубического полинома от разницы между текущим t и опорным toпop временем, соответственно:
аx=аx0+аx1·(t-tопор)+аx2·(t-tопор)2+аx3·(t-tопор)3,
аy=аy0+аy1·(t-tопор)+аy2·(t-tопор)2+аy3·(t-tопор)3,
аz=аz0+аz1·(t-tопор)+аz2·(t-tопор)2+аz3·(t-tопор)3.
Согласованная ЭИ рассчитывается по методу наименьших квадратов на основании расхождения между спрогнозированными на сутки эфемеридами и ЭИ, рассчитанной путем интегрирования упрощенной модели движения спутника, учитывая только центральную гармонику поля Земли и используя в качестве начальных условий те же спрогнозированные эфемериды. Также предлагается на основании согласованной ЭИ ввести в модуль цифровой обработки аппаратуры потребителя расширенные уравнения движения НКА.
Способ заключается в излучении радиосигналов НКА, их дальнейшем приеме i-й КИС с известными координатами, где i=1, 2, …, n, n - число КИС в зоне видимости НКА, определении в КИС псевдодальности до НКА по временной задержке сигнала, а также доплеровского смещения и последующей передаче n полученных значений в вычислительный центр главной КИС, расчете по полученным значениям и известным координатам КИС текущих координат x, y, z и скоростей Vx, Vy, Vz НКА в геоцентрической гринвичской прямоугольной системе координат и прогнозировании его местоположения на сутки вперед [Научно-технический отчет «Разработка и комплексные исследования структуры средств перспективной системы ГЛОНАСС как основы координатно-временного навигационного обеспечения (КВНО) Российской Федерации. Оценка реализации структуры. Оценка выполнимости требований потребителей. Корректировка по результатам полученных оценок структуры средств перспективной системы ГЛОНАСС как основы КВНО», ЦНИИмаш, 2010, стр.53-60]. Далее по значениям спрогнозированных координат на фиксированные опорные моменты времени tопор с определенным шагом, называемым интервалом согласования, вычисляют согласованную эфемеридную информацию вида х, у, z, Vx, Vy, Vz, аx0, аx1, аx2, аx3, аy0, аy1, аy2, аy3, аz0, аz1, аz2, аz3 следующим образом: рассчитывают промежуточные значения координат, а также скорости навигационного космического аппарата при помощи интерполяционного многочлена Лагранжа [Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы, Москва, БИНОМ. Лаборатория знаний, 2008, стр.39-42] с последующим выбором начальных значений параметров ускорений:
ax1=ax2=ay1=ay2=az1=az2=10-6,
ax0=ax3=ay0=ay3=az0=az3=0,
вычисляют вектор расхождения δd на интервале согласования по формуле:
δd=[δd1,…, δdk, δdk+1,…, δd3k)T,
где
δd1=(xинт)1-(xпрогн)1;
δdk=(xинт)k-(xпрогн)k;
δdk+1=(yинт)1-(yпрогн)1;
δd3k=(zинт)k-(zпрогн)k;
k=30÷40 - количество равномерно распределенных по интервалу согласования точек расчета расхождений;
хпрогн, yпрогн, zпрогн - спрогнозированные эфемериды;
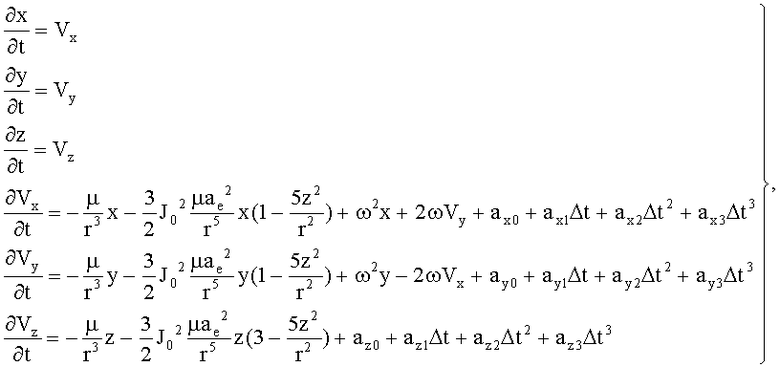
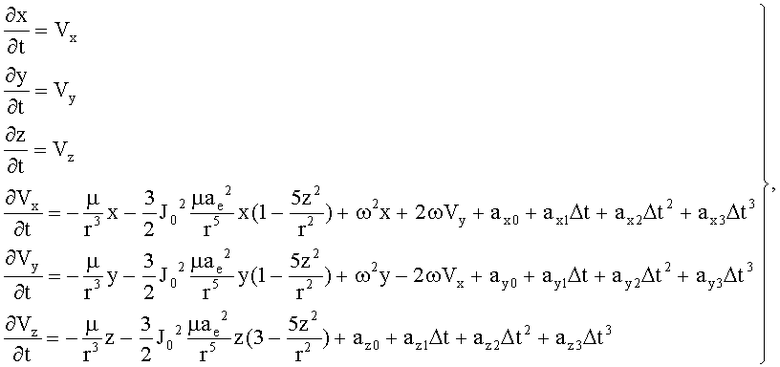
xинт, yинт, zинт - эфемеридная информация, рассчитанная путем решения системы дифференциальных уравнений модели движения навигационного космического аппарата, учитывающей согласованную эфемеридную информацию:
где 
Δ=t-tопорн;
µ=398600.44×109 м3/с2 - константа гравитационного поля Земли;
аe= 6378136 м - экваториальный радиус Земли;
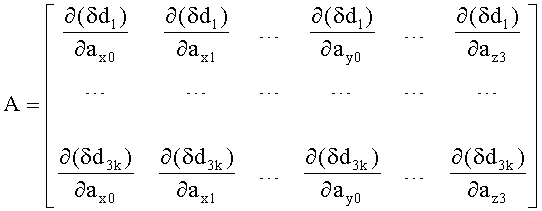
J0 2 =108265.7×10-9 - коэффициент второй зональной гармоники разложения геогравитационного потенциала в ряд по сферическим функциям, при этом в качестве начальных условий используют спрогнозированные эфемериды, полученные в вычислительном центре главной контрольно-измерительной станции, формируют методом частных приращений матрицу А:
с последующим обнулением вектора параметров ускорений, итерационным путем по методу наименьших квадратов определяют приращения 12-мерного вектора параметров ускорений:
ΔR0=(ATA)-1ATδd,
где АT - транспонированная матрица;
(ATA)-l - обратная матрица,
до тех пор, пока величины всех составляющих вектора приращений не достигнут значений, меньших 10-9 км/с2. Согласованные эфемериды транслируются на НКА при помощи одной из КИС, а затем в виде навигационного сообщения с НКА передаются потребителю. Зная согласованные эфемериды НКА в опорные моменты времени, потребитель может вычислить координаты НКА в произвольный момент времени путем интегрирования уравнений модели движения НКА, учитывающей согласованную эфемеридную информацию.
На фиг.1 приведена структурная схема заявленного устройства определения ЭИ в аппаратуре потребителя.
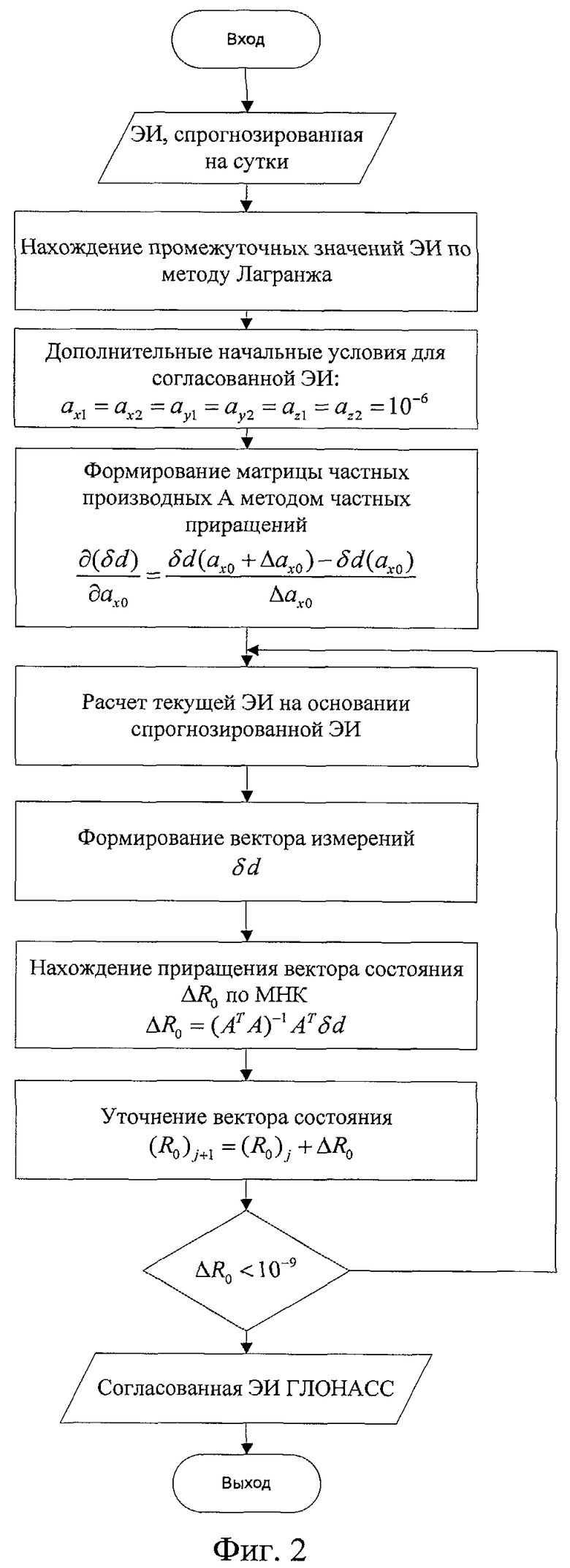
На фиг.2 представлен алгоритм вычисления согласованной ЭИ.
Устройство состоит из аппаратуры потребителя 1, НКА 2, сети КИС 3, главной КИС 4, в состав которой входит вычислительный центр 5, который содержит вычислитель согласованной ЭИ 6. При этом первая и вторая радиолиния изображены на фиг.1 в виде пунктирных линий, а каналы связи в виде сплошной линии. Для наглядности нумерации указанных радиолиний и каналов связи отсутствует, в противном случае чертеж был бы перегружен. Отметим, что первая радиолиния связывает выход НКА 2 с входом аппаратуры потребителя 1 и входами всех КИС 3, вторая радиолиния связывает выходы КИС 3 с входом НКА 2, а каналы связи связывают входы-выходы КИС 3 с соответствующими входами-выходами главной КИС 4.
Устройство работает следующим образом. При полете НКА 2 в зоне видимости i-й КИС 3, где i=1, 2, …, n, n - число контрольно-измерительных станций в зоне видимости НКА, осуществляется определение псевдодальности по навигационным радиосигналам НКА до КИС, а также доплеровского смещения, передача полученных значений в вычислительный центр главной КИС 4, где в вычислительном центре 5 по полученным значениям и известным координатам контрольно-измерительных станций рассчитывают текущие координаты и скорости НКА в геоцентрической гринвичской прямоугольной системе координат, и осуществляют высокоточный прогноз его местоположения на сутки вперед [см. указанный выше научно-технический отчет, стр.53-60]. По полученным значениям спрогнозированных координат в вычислителе согласованной ЭИ на фиксированные опорные моменты времени с определенным шагом, называемым интервалом согласования, вычисляют согласованную ЭИ вида х, у, z, Vx, Vy, Vz, аx0, аx1, аx2, аx3, аy0, аy1, аy2, аy3, аz0, аz1, аz2, аz3 следующим образом: рассчитывают промежуточные значения координат, а также скорости навигационного космического аппарата при помощи интерполяционного многочлена Лагранжа [см. вышеуказанную книгу Бахвалова Н.С., стр.39-42] с последующим выбором начальных значений параметров ускорений:
ax1=ax2=ay1=ay2=az1=az2=10-6,
ax0=ax3=ay0=ay3=az0=az3=0,
вычисляют вектор расхождения δd на интервале согласования по формуле:
δd=[δd1,…, δdk, δdk+1,…, δd3k)T,
где
δd1=(xинт)1-(xпрогн)1;
δdk=(xинт)k-(xпрогн)k;
δdk+1=(yинт)1-(yпрогн)1;
δd3k=(zинт)k-(zпрогн)k;
k=30÷40 - количество равномерно распределенных по интервалу согласования точек расчета расхождений;
хпрогн, yпрогн, zпрогн - спрогнозированные эфемериды;
xинт, yинт, zинт - эфемеридная информация, рассчитанная путем решения системы дифференциальных уравнений модели движения навигационного космического аппарата, учитывающей согласованную эфемеридную информацию:
где 
Δt=t-tопорн;
µ=398600.44×109 м3/с2 - константа гравитационного поля Земли;
ае = 6378136 м - экваториальный радиус Земли;
J0 2 =108265.7×10-9 - коэффициент второй зональной гармоники разложения геогравитационного потенциала в ряд по сферическим функциям, при этом в качестве начальных условий используют спрогнозированные эфемериды, полученные в вычислительном центре главной контрольно-измерительной станции, формируют методом частных приращений матрицу А:
с последующим обнулением вектора параметров ускорений, итерационным путем по методу наименьших квадратов определяют приращения 12-мерного вектора параметров ускорений:
ΔR0=(ATA)-1ATδd,
где АT - транспонированная матрица;
(ATA)-1 - обратная матрица,
до тех пор, пока величины всех составляющих вектора приращений не достигнут значений, меньших 10-9 км/с2. Согласованные эфемериды транслируются на НКА 2 при помощи одной из КИС 3, а затем в виде навигационного сообщения с НКА 2 передаются потребителю. Зная согласованные эфемериды НКА 2 в опорные моменты времени, потребитель может вычислить координаты НКА 2 в произвольный момент времени путем интегрирования уравнений модели движения НКА, учитывающей согласованную ЭИ.
Аппаратура потребителя 1 описана в [Харисов В.Н., Перов А.И., Болдин В.А. «Глобальная спутниковая радионавигационная система ГЛОНАСС», Москва, ИПРЖР, 1998, стр.185-219].
НКА 2 описан в [Харисов В.Н., Перов А.И., Болдин В.А. «Глобальная спутниковая радионавигационная система ГЛОНАСС», Москва, ИПРЖР, 1998, стр.131-161].
Сеть КИС описана в [Харисов В.Н., Перов А.И., Болдин В.А. «Глобальная спутниковая радионавигационная система ГЛОНАСС», Москва, ИПРЖР, 1998, стр.120-121].
Вычислительный центр главной станции КИС, использующий необходимые математические выражения и алгоритм вычисления высокоточного прогноза ЭИ на сутки вперед, описан в ранее указанном научно-техническом отчете, а также известен и из прототипа.
Первая и вторая радиолинии и каналы связи известны [Пенин П.И. «Системы передачи цифровой информации»: Учебное пособие для вузов. - М.: Сов. радио, 1976, с.342-345; Спилкер Дж. «Цифровая спутниковая связь». Пер. с англ. - М.: Связь, 1979, с.15-21] и используются во всех спутниковых радионавигационных системах позиционирования, в частности в GPS, ГЛОНАСС, ссылки на которые приведены в описании.
Вычислитель согласованной ЭИ охарактеризован на функциональном уровне, и форма его реализации предполагает использование программируемых средств [Пятибратов А.П., Гудыно Л.П., Кириченко А.А. «Вычислительные системы, сети и телекоммуникации», Москва, «Финансы и статистика», 2004, стр.1-273], при этом в материалах заявки (формула, п.2) приведены соответствующие расчетные математические выражения, а на фиг.2 представлен вычислительный алгоритм в виде блок-схемы.
Изобретение относится к спутниковым радионавигационным системам позиционирования, в частности, для определения, прогнозирования или корректировки эфемеридных данных. Технический результат - повышение точности и надежности. Для достижения данного результата при полете космического аппарата (КА) в зоне видимости контрольно-измерительных станций (КИС) осуществляют измерение псевдодальности по навигационным радиосигналам НКА до КИС на основе временной задержки сигнала. При этом осуществляют определение доплеровского смещения и передачу измерений в вычислительный центр главной КИС. По полученным значениям спрогнозированных координат на фиксированные опорные моменты времени с определенным шагом определяют эфемериды, которые загружаются на НКА при помощи передающих антенн сети КИС, а затем в виде навигационного сообщения передаются потребителям. Зная согласованные эфемериды НКА в опорные моменты времени, потребитель определяет координаты НКА в произвольный момент времени путем интегрирования уравнений модели движения НКА. 2 н.п. ф-лы, 2 ил.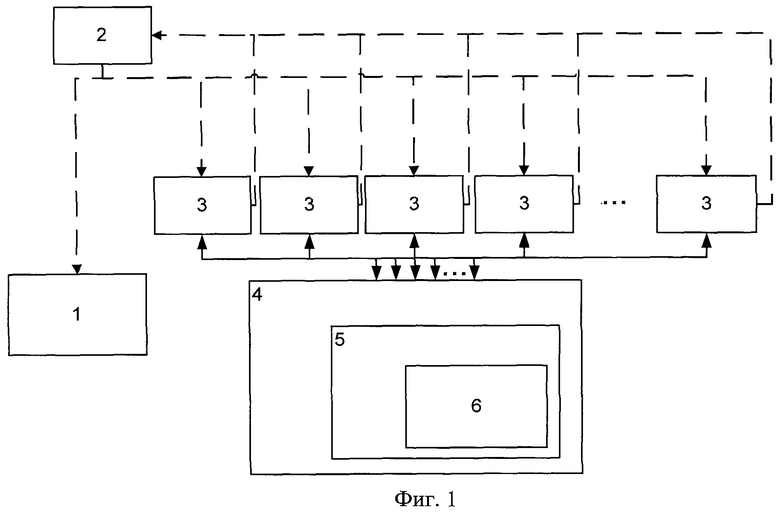
1. Способ определения эфемеридной информации в аппаратуре потребителя, заключающийся в излучении радиосигналов навигационным космическим аппаратом, их дальнейшем приеме i-й контрольно-измерительной станцией с известными координатами, где i=1, 2, …, n, n - число контрольно-измерительной станций в зоне видимости навигационного космического аппарата, определении в контрольно-измерительной станции псевдодальности до навигационного космического аппарата по временной задержке сигнала, а также доплеровского смещения и последующей передаче n полученных значений в вычислительный центр главной контрольно-измерительной станции, расчете по полученным значениям и известным координатам контрольно-измерительных станций текущих координат х, у, z и скоростей Vx, Vy, Vz навигационного космического аппарата в геоцентрической гринвичской прямоугольной системе координат и прогнозировании его местоположения на сутки вперед, отличающийся тем, что по значениям спрогнозированных координат на фиксированные опорные моменты времени tопор с определенным шагом, называемым интервалом согласования, вычисляют согласованную эфемеридную информацию вида:
х, y, z, Vx, Vy, Vz, аx0, аx1, аx2, аx3, аy0, аy1, аy2, аy3, аz0, аz1, аz2, аz3,
где ах0, ax1, ах2, ах3, ау0, ay1, ау2, aу3, аz0, az1, az2, az3 - параметры ускорений, представленных в виде кубического полинома от разницы между текущим t и опорным tопор временем, соответственно:
аx=аx0+аx1·(t-tопор)+аx2·(t-tопор)2+аx3·(t-tопор)3,
аy=аy0+аy1·(t-tопор)+аy2·(t-tопор)2+аy3·(t-tопор)3,
аz=аz0+аz1·(t-tопор)+аz2·(t-tопор)2+аz3·(t-tопор)3,
следующим образом: рассчитывают промежуточные значения координат, а также скорости навигационного космического аппарата при помощи интерполяционного многочлена Лагранжа с последующим выбором начальных значений параметров ускорений:
ax1=ax2=ay1=ay2=az1=az2=10-6,
ax0=ax3=ay0=ay3=az0=az3=0,
вычисляют вектор расхождения δd на интервале согласования по формуле:
δd=(δd1,…, δdk, δdk+1,…, δd3k)T,
где δd1=(xинт)1-(xпрогн)1;
δdk=(xинт)k-(xпрогн)k;
δdk+1=(yинт)1-(yпрогн)1;
δd3k=(zинт)k-(zпрогн)k;
k=30÷40 - количество равномерно распределенных по интервалу согласования точек расчета расхождений; xпрогн, упрогн, zпрогн - спрогнозированные эфемериды; xинт, уинт, zинт - эфемеридная информация, рассчитанная путем решения системы дифференциальных уравнений модели движения навигационного космического аппарата, учитывающей согласованную эфемеридную информацию:
где  ;
;
Δ=t-tопор;
µ=398600,44×109 м3/с2 - константа гравитационного поля Земли;
ае=6378136 м - экваториальный радиус Земли;
J0 2=108265,7×10-9 - коэффициент второй зональной гармоники разложения геогравитационного потенциала в ряд по сферическим функциям, при этом в качестве начальных условий используют спрогнозированные эфемериды, полученные в вычислительном центре главной контрольно-измерительной станции, формируют методом частных приращений матрицу А:
с последующим обнулением вектора параметров ускорений, итерационным путем по методу наименьших квадратов определяют приращения 12-мерного вектора параметров ускорений:
ΔR0=(AТА)-1AТδd,
где АT - транспонированная матрица;
(ATA)-1 - обратная матрица,
до тех пор пока величины всех составляющих вектора приращений не достигнут значений, меньших 10-9 км/с2; транслируют полученную в результате расчета согласованную эфемеридную информацию через одну из контрольно-измерительных станций на навигационный космический аппарат, передают потребителю с навигационного космического аппарата эфемеридную информацию в составе навигационного сообщения, в аппаратуре потребителя на основе принятой эфемеридной информации, рассчитанной на опорные моменты времени, путем интегрирования уравнений модели движения навигационного космического аппарата, учитывающей согласованную эфемеридную информацию, вычисляют эфемеридную информацию навигационного космического аппарата в произвольный момент времени.
2. Устройство определения эфемеридной информации в аппаратуре потребителя, содержащее аппаратуру потребителя, навигационный космический аппарат, n контрольно-измерительных станций, где n=4, 5, …, главную контрольно-измерительную станцию, в состав которой входит вычислительный центр, при этом выход навигационного космического аппарата связан первой радиолинией с входом аппаратуры потребителя и входами всех контрольно-измерительных станций, входы-выходы каждой контрольно-измерительной станции связаны с соответствующими входами-выходами главной станции контрольно-измерительной станции посредством каналов связи, выходы контрольно-измерительных станций связаны второй радиолинией с входом навигационного космического аппарата, отличающееся тем, что введен в вычислительный центр главной контрольно-измерительной станции вычислитель согласованной эфемеридной информации, реализующий вычисление согласованной эфемеридной информации вида:
х, y, z, Vx, Vy, Vz, аx0, аx1, аx2, аx3, аy0, аy1, аy2, аy3, аz0, аz1, аz2, аz3,
где аx0, аx1, аx2, аx3, аy0, аy1, аy2, аy3, аz0, аz1, аz2, аz3 - параметры ускорений, представленных в виде кубического полинома от разницы между текущим t и опорным tопор временем, соответственно:
аx=аx0+аx1·(t-tопор)+аx2·(t-tопор)2+аx3·(t-tопор)3,
аy=аy0+аy1·(t-tопор)+аy2·(t-tопор)2+аy3·(t-tопор)3,
аz=аz0+аz1·(t-tопор)+аz2·(t-tопор)2+аz3·(t-tопор)3,
следующим образом: рассчитывают промежуточные значения координат, а также скорости навигационного космического аппарата при помощи интерполяционного многочлена Лагранжа с последующим выбором начальных значений параметров ускорений:
ax1=ax2=ay1=ay2=az1=az2=10-6,
ax0=ax3=ay0=ay3=az0=az3=0,
вычисляют вектор расхождения δd на интервале согласования по формуле:
δd=[δd1,…, δdk, δdk+1,…, δd3k)T,
где
δd1=(xинт)1-(xпрогн)1;
δdk=(xинт)k-(xпрогн)k;
δdk+1=(yинт)1-(yпрогн)1;
δd3k=(zинт)k-(zпрогн)k;
k=30÷40 - количество равномерно распределенных по интервалу согласования точек расчета расхождений;
xпрогн, yпрогн, zпрогн - спрогнозированные эфемериды;
xинт, yинт, zинт - эфемеридная информация, рассчитанная путем решения системы дифференциальных уравнений модели движения навигационного космического аппарата, учитывающей согласованную эфемеридную информацию:
где  ;
;
Δ=t-tопор;
µ=398600,44×109 м3/с2 - константа гравитационного поля Земли;
ae=6378136 м - экваториальный радиус Земли;
J0 2=108265,7×10-9 - коэффициент второй зональной гармоники разложения геогравитационного потенциала в ряд по сферическим функциям, при этом в качестве начальных условий используют спрогнозированные эфемериды, полученные в вычислительном центре главной контрольно-измерительной станции, формируют методом частных приращений матрицу А:
с последующим обнулением вектора параметров ускорений, итерационным путем по методу наименьших квадратов определяют приращения 12-мерного вектора параметров ускорений:
ΔR0=(АTA)-1ATδd,
где АT - транспонированная матрица;
(АTА)-1 - обратная матрица,
до тех пор пока величины всех составляющих вектора приращений не достигнут значений, меньших 10-9 км/с2, при этом первая радиолиния выполнена с возможностью осуществления передачи потребителю с навигационного космического аппарата эфемеридной информации в составе навигационного сообщения, а аппаратура потребителя выполнена с возможностью вычисления эфемеридной информации навигационного космического аппарата в произвольный момент времени на основе принятой эфемеридной информации, рассчитанной на опорные моменты времени, путем интегрирования уравнений модели движения навигационного космического аппарата, учитывающей согласованную эфемеридную информацию.
| ЯЦЕНКО В.С | |||
| Основы спутниковой навигации | |||
| Системы GPS NAVSTAR и ГЛОНАСС | |||
| - М.: Горячая линия-Телеком, 2005, с.42, 111-152 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ДАЛЬНОСТИ И ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ НАВИГИРУЮЩИМСЯ ОБЪЕКТОМ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152048C1 |
| US 7490008 B2, 10.02.2009 | |||
| US 0007545317 B2, 09.06.2009 | |||
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2181927C1 |
| Бортовые устройства спутниковой радионавигации./ Под ред | |||
| B.C.ШЕБШАЕВИЧА | |||
| - М.: Радио и связь, 1988, с.200. | |||

