Изобретение относится к радиолокации, в частности к устройствам для контроля инструментальных систем посадки летательных аппаратов и управления воздушным движением (УВД) в районах аэродромов.
Известны способ и устройство для определения местоположения транспортного средства по отношению к заданной траектории [1] Устройство содержит датчики-радиоприемники для получения информации от двух радиомаяков наведения летательных аппаратов (ЛА), запоминающее устройство, в котором хранятся данные заданной траектории полета ЛА, средства считывания информации из запоминающего устройства и средство для вычисления расстояния между двумя точками на указанной траектории, которые могут быть переданы в устройство вывода и отображения информации.
Способ позволяет оценить только "простейшие" траектории, имеющие малые радиусы искривлений, в силу использования численных значений дискретных отрезков (двух точек) траекторий, но не дает возможности оценивать криволинейные траектории, задаваемые радиомаяками микроволновых систем посадки (МСП).
В устройстве отсутствуют автономные средства точного измерения действительной (реальной) траектории движения ЛА, сравниваются только угловые параметры траекторий, задаваемых радиомаяками, и отсутствуют дальномерный канал измерения удаления ЛА от требуемой точки или радиомаяка наведения, что также снижает точность и достоверность определения местоположения. Производится только сравнение двух точек эталонной траектории, хранящейся в запоминающем устройстве, и траектории, задаваемой радиомаяками системы наведения, вследствие чего не обеспечивается высокая точность при значительных отклонениях сравниваемых траекторных параметров.
Известна также система управления воздушным движением с автономным контролем лазерными локационными средствами [2] в которой при проведении траекторного контроля систем УВД вычислительное устройство производит идентификацию вектора состояния процесса УВД по данным траекторных измерений параметров самолета, задаваемых радиолокационными и лазерными средствами. Оперативный контроль функционирования системы УВД производится путем обработки выходных сигналов радиолокационных и лазерных траекторных измерительных средств, работающих в режиме слежения за самолетом, при этом с помощью контура наведения и контура контроля обеспечивается получение оптимальных оценок вектора состояния процесса УВД и прогнозирования параметров траектории полета самолета, чем исключаются срывы слежения из-за влияния метеорологических факторов.
Эта система имеет следующие недостатки: отсутствуют устройства считывания, преобразования и сравнения данных трех траекторий (траектории, задаваемой МСП, траектории, измеряемой лазерным локационным устройством, и траектории, хранящейся в запоминающем устройстве), отсутствуют устройства хранения данных эталонных траекторий; отсутствуют устройства идентификации, оптимальной фильтрации и оценки; отсутствуют устройства выработки и внесения калибровочных отклонений.
На чертеже представлена структурная схема системы контроля МСП летательных аппаратов.
Система контроля МСП летательных аппаратов содержит радиоприемный блок 1 для получения траекторной информации с борта самолета, блок 2 лазерных локационных траекторных измерений, блок синхронизации 3, запоминающее устройство 4, блоки 5 и 6 считывания и сравнения, преобразовательно-вычислительные блоки 7 и 9, блок 8 сравнения и суммирования, блок 10 оптимальной фильтрации и блок 12 количественной оценки погрешностей МСП, блок 11 передачи калибровочных сигналов для отработки в МСП и блок 13 отображения и регистрации погрешностей МСП.
Микроволновая система посадки задает с помощью сканирующих СВЧ-лучей зону посадки и маневрирования ЛА и выдает на борт данные об угловых параметрах и дальности до точки приземления, которые вводят в бортовой вычислитель, формирующий посадочную траекторию (прямолинейную, криволинейную, сегментную и т.п.). Сигнал МСП поступает на третий вход блока синхронизации 3. Радиоприемный блок 1 служит для приема траекторной информации, которая передается по радиоканалу с борта ЛА и получается на основе данных, выдаваемых на борт МСП.
Блок 2 лазерных локационных траекторных измерений обеспечивает высокоточные автономные траекторные измерения истинных параметров траектории полета ЛА, которые используются при идентификации по отношению к эталонной траектории и внесения калибровочных отклонений.
Блок синхронизации 3 обеспечивает сведение к единому моменту времени и синхронизацию работы МСП, лазерного локационного блока и блоков выборки данных из запоминающего устройства 4. Блок включает в себя таймер, а также устройства сопряжения и передачи меток времени.
Запоминающее устройство 4 служит для хранения данных стандартных (эталонных) траекторий и выдачи их для сравнения и идентификации по отношению в двум траекториям, одна из которых задается МСП и формируется на борту ЛА, а другая измеряется с помощью лазерных блоков.
Блоки 5 и 6 считывания и сравнения производят выборку данных эталонных траекторий и формируют обобщенные характеристики отклонений от стандартных значений соответственно для траекторий, задаваемых МСП, и траекторий, измеренных лазерными траекторными измерителями 2 в различных системах координат: в полярной системе координат МСП и в сферической (угломерно-дальномерной) системе координат лазерных траекторных измерителей.
Преобразовательно-вычислительные блоки 7, 9 осуществляют преобразование координат измеренных значений траекторных параметров и вычисляют значение радиус-вектора по измеренным и преобразованным значениям компонент вектора отклонений.
Структура алгоритмов, реализуемых блоками 7 и 9, представляет собой структуру типового вычислителя, выполняющего операции двух видов:
а) преобразование измеренных компонент вектора отклонений летательного аппарата (самолета-лаборатории) относительно заданной S-ой эталонной траектории У1(s) + ζ1(t) с помощью МСП и У2(s) + ζ2(t) с помощью ЛСТИ путем умножения их на матрицы [H1(s)]-1 и [H2(s)]-2соответственно.
б) вычисление радиус-векторов вида:
[Q1(s)(ζ1,(t)]2 [q1i(s)( ζ1,(t)]2
[q1i(s)( ζ1,(t)]2
[Q2(s)(ζ2, (t)]2 [q2i(s)( ζ2, (t)]2.
[q2i(s)( ζ2, (t)]2.
Следует заметить, что реализация такого вычислителя возможна как на базе цифровой микропроцессорной техники, так и на базе аналоговой вычислительной техники с применением соответствующих аналого-цифровых преобразователей.
Блок 8 сравнения и суммирования представляет собой цифровые программно-ориентированные вычислительные устройства, выполняющие операции сравнения и суммирования их значений. Блок 10 оптимальной фильтрации производит операции фильтрации и оценки суммарных функциональных отклонений и определяет функциональные характеристики отклонений действительной траектории от стандартной с точностью, превышающей точность каждого из датчиков траекторной информации микроволновой системы посадки и лазерных измерителей.
Структура алгоритма для получения обобщенного функционала количественной оценки 10.
I этап. По совокупности минимально необходимых измерений с помощью ЛСТИ (лазерная система траекторных измерений);
1. Образуется вектор состояния процесса Х(t) и рассчитывается обобщенный показатель процесса IЛ (t).
1.1. Осуществляется выбор из блока памяти ЗУ стандартной рациональной для данного класса ЛА траектории захода на посадку
[ αЛ (ti), βЛ (ti), RЛ (ti)] ->> ХЛ (ti) ->>
->> IЛ (ti) ->> Уст(ti).
1.2 Осуществляется оценка и прогноз отклонений измеренного с помощью ЛСТИ состояния процесса полета от состояния на стандартной траектории:
Qn(1)(t) F1[XЛ (t) Уст(t)]
II этап. По совокупности минимально необходимых измерений с помощью телеметрических устройств:
2. Образуется вектор состояния МСП + +РТМ (радиотелеметрические устройства) процесса посадки Хм(t) и рассчитывается обобщенный показатель процесса Iм(t).
2.1. Осуществляется оценка и прогноз отклонений выработанного состояния Хм/Iм от состояния Хл/Iл.
[αм (ti), βм (ti), Rм(ti)] ->>Хм(t) ->> Iм(t) ->> Ул(t),
Qм(t) Fм[Хм Хл]
Отклонения Qм позволяют идентифицировать ошибки МСП + РТМ.
2.2 Осуществляется оценка и прогноз отклонений действительной траектории от выбранного варианта рациональной траектории:
Qп(2)(t) F2[Уст(t) Уп(t)]
Блок 11 передачи данных осуществляет трансляцию калибрующих погрешностей для отработки на микроволновой системе посадки.
Блок 12 количественной оценки погрешностей МСП производит вычисление количественных оценок погрешностей МСП, определяющих калибровочные данные отработки их на микроволновой системе посадки. Найденные в блоке 10 оптимальной фильтрации с предельной потенциально-возможной точностью функциональные характеристики действительных отклонений траектории ЛА от эталонной его траектории используются для сопоставления их в блоке 12 количественной оценки погрешности МСП с функциональными отклонениями микроволновой системы посадки, получаемыми в первом преобразовательно-вычислительном блоке 7. Результаты такого сопоставления позволяют здесь же в блоке 12 количественной оценки погрешности МСП вычислять значения вектора-радиуса отклонений траектории, задаваемой микроволновой системой посадки, находить на каждом из заданных стандартных отрезков времени их интегралы, характеризующие количественные оценки ее погрешностей, а также пересчитывать их в калибровочные данные для учета и отработки в микроволновой системе посадки. Алгоритм, который реализует блок 12, представляет собой алгоритм преобразования координат и построения радиус-вектора по значениям его компонент, алгоритм интегрирования (суммирования) с целью получения обобщенной функции функционала количественной оценки.
Блок 13 отображения и регистрации погрешностей микроволновой системы посадки предназначен для воспроизведения на видеоустройстве типа "дисплей" и записи на машинных носителях погрешностей МСП, полученных в процессе летных испытаний.
Система работает следующим образом.
В процессе летных испытаний и контроля получаемая от микроволновой системы посадки координатная информация на борту самолета передается в наземный комплекс. Эта информация принимается радиоприемным блоком 1 для совместной обработки с целью определения непосредственно величины и статических характеристик ошибок, сформированных радиомаяками микроволновой системы посадки траекторий положения самолета в пространстве. Лазерные устройства 2 траекторных измерений, работающие в системе единого времени, блок синхронизации 3 с микроволновой системой посадки выдают данные о действительной траектории движения самолета, которые поступают в первый блок 6 считывания и сравнения с данными эталонных (калибровочных) значений точек координат на стандартных траекториях, хранящихся в запоминающем устройстве 4. Одновременно траекторные данные, поступающие на вход радиоприемного блока 1, подаются и аналогичным образом обрабатываются в блоках 5, 6 считывания и сравнения. В блоках 5 и 6 образуются обобщенные характеристики отклонений состояния процесса полета от стандартных их значений, хранящихся в запоминающем устройстве 4 для случая измерений с помощью микроволновой системы посадки и лазерных траекторных измерителей соответственно. Эти обобщенные характеристики позволяют идентифи- цировать две траектории: траекторию, построенную по данным микроволновой системы посадки, и траекторию по измерениям блока 2 лазерных локационных траекторных измерений. Соответственно операции сравнения и последующей обработки преобразовательно-вычислительных блоков 7 и 9 позволяют решать задачу калибровки микроволновой системы посадки в отклонениях, что существенно повышает точность всех операций и преобразования. Таким образом, обрабатывая синхронные обобщенные характеристики отклонений, найденные в блоках 5, 6 считывания и сравнения, с помощью преобразовательно-вычислительных блоков 7, 9 в соответст- вующих каждому отклонению значений специальных функционалов осуществляют тем самым идентификацию отклонений двух траекторий от эталонной. Отклонения, найденные по измерениям с помощью МСП и лазерных траекторных измерителей, а также данным запоминающего устройства, и преобразованные в специальные функциональные отклонения для обоих случаев измерений в вычислительных блоках 7 и 9 далее сравниваются комплексируются в блоке 8 сравнения и суммирования. Это позволяет путем оптимальной фильтрации их в блоке 10 передачи калибровочных сигналов с точностью, превышающей номинальную точность каждого из измерителей, МСП и лазерных траекторных измерителей 2, найти функциональные характеристики отклонений действительной траектории полета от стандартной, выбранной в данном конкретном случае реализации летных испытаний экипажем и имеющейся в запоминающем устройстве 4. Путем сравнения полученных в блоке 10 оптимальной фильтрации точных функционалов отклонений с их значениями, полученными ранее в цепи микроволновая система посадки радиоприемный блок 1 блок сравнения 5 преобразовательно-вычислительный блок 7, в преобразующем вычислительном блоке 12 вычисляются значения калибрующих погрешностей микроволновой системы посадки. Далее эти ошибки посылаются на блок 13 регистрации и отображения и на блок 11 передачи калибровочных сигналов в микроволновую систему посадки для обработки. Блок 11 передачи калибровочных сигналов и блок 13 отображения и регистрации погрешностей необходимы для того, чтобы погрешности в них представлялись в наиболее удобном для каждого из указанных случаев. Использование предлагаемой системы контроля и калибровки микроволновой системы посадки, работающей с синхронно измеренными и вычисленными отклонениями двух траекторий от эталонной, путем их оптимального комплексирования в блоке оценивания и фильтрации, позволяет синтезировать обобщенный функционал, идентифицирующий отклонения действительной траектории полета самолета от эталонной с точностью, превосходящей точность лазерных устройств. Эти данные позволяют далее идентифицировать и использовать погрешности микроволновой системы посадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ КОНТРОЛЯ КАЧЕСТВА ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2109657C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Устройство для управления заходом самолета на посадку | 1990 |
|
SU1783482A1 |
| СПОСОБ И СИСТЕМА МОНИТОРИНГА АВИАЦИОННОГО ШУМА | 2021 |
|
RU2775874C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ КАЧЕСТВА ПОСАДКИ МАНЕВРЕННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2116940C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ ОГНЕЙ ВЫСОКОЙ ИНТЕНСИВНОСТИ | 1992 |
|
RU2065621C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| Устройство для определения характеристик ветра | 1990 |
|
SU1789931A1 |
Использование: радиолокация. Сущность изобретения: лазерная система контроля микроволновых систем посадки (МСП) летательных аппаратов содержит радиоприемный блок 1, блок 2 лазерных локационных траекторных измерений, блок синхронизации 3, запоминающее устройство 4, два блока 5,6 считывания и сравнения, два преобразовательно-вычислительных блока 7 и 9, блок 8 сравнения и суммирования, блок 10 оптимальной фильтрации, блок 12 количественной оценки погрешностей МСП, блок 11 передачи калибровочных сигналов для отработки в МПС, блок 13 отображения и регистрации погрешностей МСП. Работая с синхронно измеренными и вычисленными отклонениями двух траекторий от эталонной путем их оптимального комплексирования в блоках 12 и 10 система позволяет синтезировать с высокой точностью обобщенный функционал, идентифицирующий отклонение действительной траектории полета самолета от эталонной. 1 ил.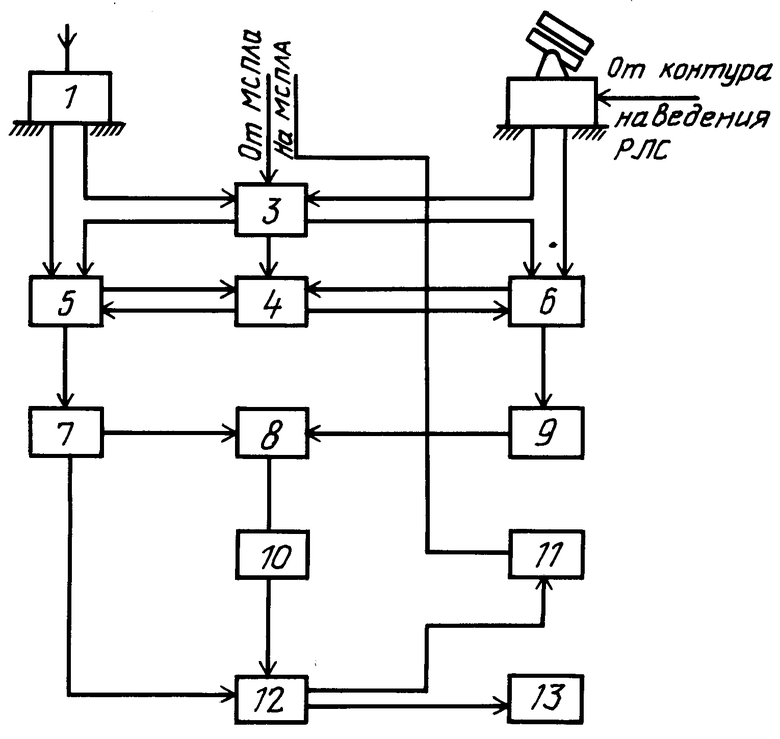
ЛАЗЕРНАЯ СИСТЕМА КОНТРОЛЯ МИКРОВОЛНОВЫХ СИСТЕМ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (МСП ЛА), содержащая блок лазерных локационных траекторных измерений, радиоприемный блок, запоминающее устройство и два блока считывания и сравнивания, отличающаяся тем, что введены блок оптимальной фильтрации, два преобразовательно-вычислительных блока, блок сравнения и суммирования, блок количественной оценки погрешностей микроволновой системы посадки, блок синхронизации, блок отображения и регистрации погрешностей микроволновой системы посадки и блок передачи калибровочных сигналов, при этом первые выходы радиоприемного блока и блока лазерных локационных траекторных измерений соответственно соединены с первым и вторым входами блока синхронизации, второй выход радиоприемного блока подключен к второму входу первого блока считывания и сравнения, первый вход которого соединен с первым выходом блока синхронизации, второй выход блока лазерных локационных траекторных измерений подключен к второму входу второго блока считывания и сравнения, первый вход которого соединен с вторым выходом блока синхронизации, третий выход которого подключен к первому входу запоминающего устройства, первый выход и второй вход которого соответственно соединены с третьим входом и первым выходом первого блока считывания и сравнения, а второй выход и третий вход запоминающего устройства соединены соответственно с третьим входом и первым выходом второго блока считывания и сравнения, вторые выходы первого и второго блоков считывания и сравнения соответственно соединены с входом первого и второго преобразовательно-вычислительных блоков, первые выходы которых подключены соответственно к первому и второму входам блока сравнения и суммирования, выход которого соединен с входом блока оптимальной фильтрации, выход которого подключен к первому входу блока количественной оценки погрешностей микроволновой системы посадки, второй вход которого соединен с вторым выходом первого преобразовательно-вычислительного блока, первый и второй выходы блока количественной оценки погрешностей микроволновой системы посадки соответственно подключены к входу блока отображения и регистрации погрешностей микроволновой системы посадки и к входу блока передачи калибровочных сигналов, выход которого является выходом для сигнала МСП ЛА, а третий блок синхронизации является входом для сигнала МСП ЛА.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| "Оптимизация лазерных методов траекторного контроля, испытания и сертификации радиоэлектронных систем посадки, навигации и УВД" | |||
| - Докторская диссертация, Академия гражданской авиации, 1985. | |||
