1
(21)4777313/24 (22)03.01.90 (46)23.12.92. Бюл. N 47
(71)Академия гражданской авиации
(72)А. Н. Барабаш
(56)Патент ФРГ № 1406587, кл. G 05 D 1/10, 1971.
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАХОДОМ САМОЛЕТА НА ПОСАДКУ
(57)Изобретение относится к авиации и, в частности, к устройствам, обеспечивающим заход самолета на посадку по курсу на аэродромы без наземного радиотехнического оборудования. Целью изобретения является повышение безопасности полета при посадке. Для этого в устройство, содержащее бортовую радиолокационную станцию, блок обработки сигналов, формирователь управляющих команд, пассивный отраха- тель и индикатор, введены дифференцирующий блок, пульт дистанционного управления, датчик скорости и датчик курса, причем пассивный отражатель расположен в точке, равноудаленной от торцов взлетно- посадочной полосы на расстояние не менее половины ширины взлетно-посадочной полосы от ее бокового края 1 з. п. ф-лы, 9 ил.
Изобретение относится к авиации и, в частности, к устройствам, обеспечивающим заход на посадку по курсу на аэродромы без наземного радиотехнического оборудования.
Известны устройства управления по курсу в действующих системах посадки ILS и СП-50 (Михалев И. А. Системы автоматической посадки. М.: Машиностроение, 1975, с. 11-19), включающее в себя наземное и бортовое оборудование.
Главным элементом наземного оборудования является курсовой радиомаяк (КРМ), с помощью которого создается радиополе специальной конфигурации и напряженности, задающее в горизонтальной плоскости траекторию снижения воздушного судна (ВС) для посадки - линию курса.
Бортовое оборудование управления по курсу включает в себя курсовой радиоприемник, блок обработки принятого сигнала, блок формирования управляющего параметра и выдачи его на индикатор, по которому пилот определяет место В С относительно линии курса.
Недостатком вышеописанных устройств управления по курсу является обяза- тельное наличие КРМ, что часто невозможно или нецелесообразно (на аэродромах с малой интенсивностью псле- тов), а также сложность и высокая стоимость наземного и бортового посадочного оборудования.
Наиболее близким к изобретению по технической сущности является системе захода самолета на посадку (патент ФРГ Ns 1406587, кл. G 05 D 1/10), содержащая устройство управления по курсу, включающее: два пассивных отражателя (расположенных по оси взлетно-посадочной полосы (ВПП) на расстоянии не менее 1800 м); бортовую радиолокационную станцию (БРЛС); блок обработки полученного сигнала- блок
-vl
00 СА
формирования управляющего параметра; индикатор.
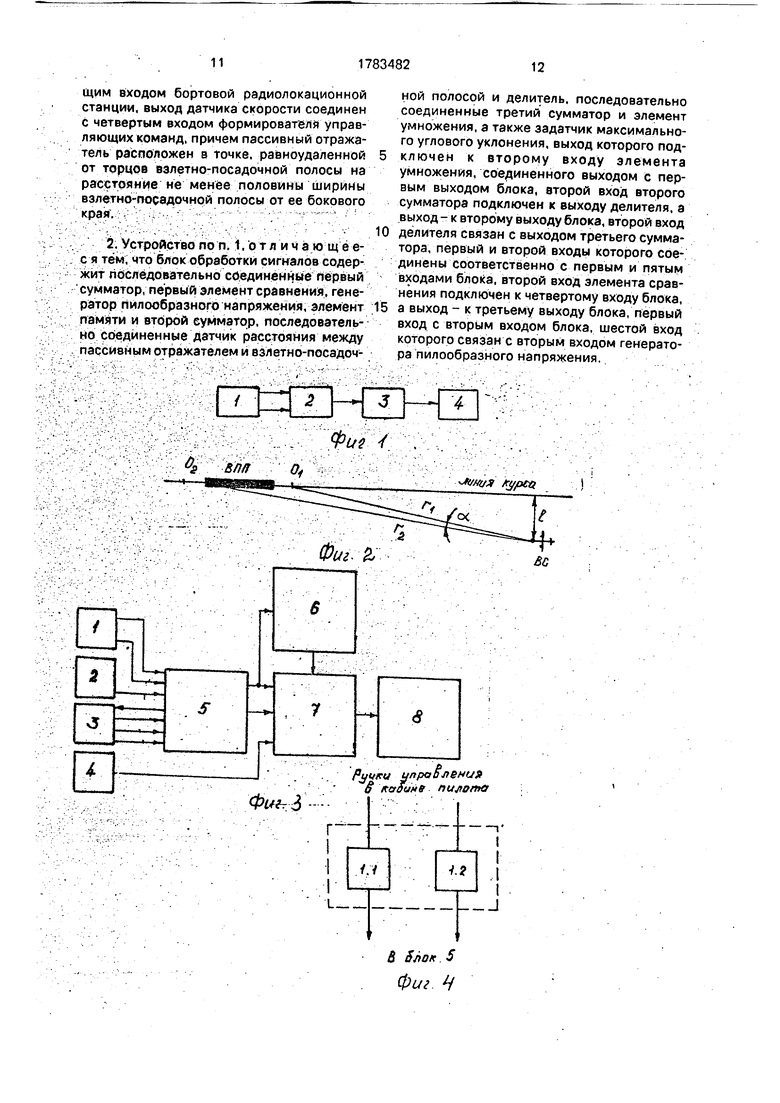
На фиг. 1 представлена блок-схема устройства: 1 - БРЛС; 2 - блок обработки полученного сигнала; 3 - блок формирования управляющего параметра; 4 - индикатор; на фиг. 2 - схема работы устройства.
БРЛС 1 облучает отражатели СИ и 02 (фиг. 2), подавая данные на вход блока 2. В блоке обработки полученного сигнала 2 измеряется временная задержка AT между полученными отраженными импульсами и расстояния п и Г2 от ВС до отражателей.
В блоке формирования управляющего сигнала 3 по величинам AT, п, га рассчитывается угол между направлениями на отражатели а, а по величинам а, п, Г2 рассчитывается линейное отклонение от ли нии курса I, пропорционально которому вырабатывается управляющий параметр и подается на индикатор 4.
Недостатком данного устройства является низкая информативность управляющего параметра, выраженная в возможности контролировать лишь линейное боковое отклонение от линии курса, а также необходимость установки двух пассивных отражателей.
Цель изобретения - повышение безопасности полетов при посадке.
Поставленная цель достигается тем, что устройство для управления заходом самолета на посадку, содержащее бортовую радиолокационную станцию, первый и второй входы которой подключены соответственно к первому и второму входам блока обработки сигналов, формирователь управляющих команд, соединенный первым входом с первым выходом блок обработки сигналов, а выходом - с входом индикатора, пассивный отражатель, дополнительно содержит дифференцирующий блок, пульт дистанционного управления, датчик скорости и датчик курса, подключенный выходом к третьему входу блока обработки сигналов, четвертый и пятый входы которого связаны соответственно с первым и вторым выходами пульта дистанционного управления, шестой вход- с третьим выходом бортовой радиолокационной станции, второй выход - с вторым входом формирователя управляющих команд и через дифференцирующий блок - с третьим входом формирователя управляющих команд, а третий выход - с управляющим входом бортовой радиолокационной станции, выход датчика скорости соединен с четвертым входом формирователя управляющих команд, причем пассивный отр ажа- тель расположен в точке, равноудаленной
от торцов взлетно-посадочной полосы на расстояние не менее половины ширины взлетно-посадочной полосы от ее бокового края. Кроме того, блок обработки сигналов
содержит последовательно соединенные первый сумматор, первый элемент сравнения, генератор пилообразного напряжения, элемент памяти и второй сумматор, последовательно соединенные задатчик расстояния между пассивным отражателем и взлетно-посадочной полосой и делитель, последовательно соединенные третий сумматор и элемент умножения, а также задатчик максимального углового уклонения,
выход которого подключен к второму входу элеменуа умножения, соединенного выходом с первым выходом блока, второй вход второго сумматора подключен к выходу делителя, а выход - к второму выходу блока,
второй вход делителя связан с выходом третьего сумматора, первый и второй входы которого соединены соответственно с первым и пятым входами блока, второй вход элемента сравнения подключен к четвертому входу блока, а выход - к третьему выходу блока, первый вход первого сумматора соединен с третьим входом блока, а второй вход - с вторым входом блока, шестой вход которого связан с вторым входом генератора пилообразного напряжения.
На фиг. 3 представлена общая блок-схема предлагаемого устройства; на фиг, 4 - пульт дистанционного управления (ПДУ); на фиг, 5 - блок обработки сигналов1 da фиг. 6
- временные диаграммы работы блока обработки сигнала; на фиг. 7 - формирователь управляющих команд; на фиг. 8 - общая блок-схема БРЛС; на фиг. 9 - схема работы устройства.
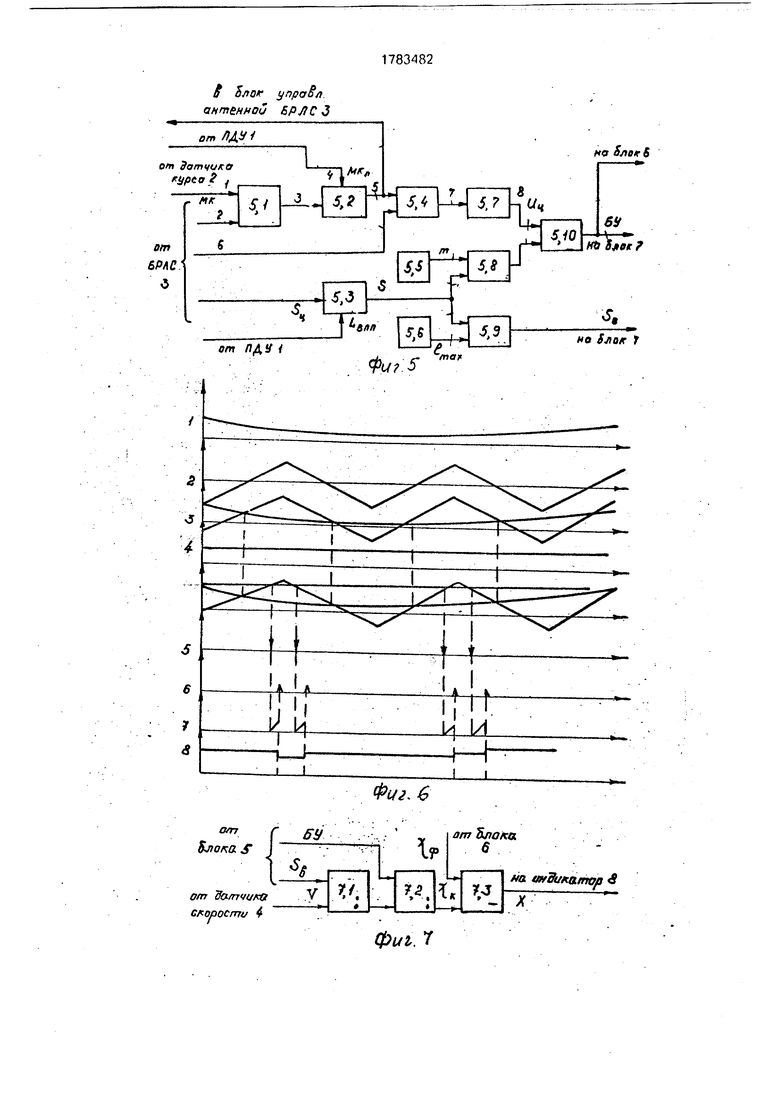
На фиг. 3 приняты следующие обозначения; 1 - ПДУ; 2 - датчик курса; 3 - БРЛС; 4 - датчик скорости; 5 - блок обработки сигналов; 6 - дифференцирующий блок; 7 - формирователь управляющих команд; 8 индикатор; на фиг. 4:1.1- задатчик (величины МКп); 1.2-задатчик(величины Свпп); на фиг. 5: 5.1 - сумматор; 5.2 - элемент сравнения; 5.3 - сумматор; 5.4 - генератор пилообразного напряжения; 5.5 - задатчик
(величины т): 5.6 - задатчик (величины Uax); 5.7 - элемент памяти; 5.8 - делитель; 5.9 - элемент умножения 5.10 - сумматор; на фиг. 7: 7.1, 7.2 -делители; 7.3 - вычитающее устройство; на фиг. 8: 1 - синхронизатор; 2
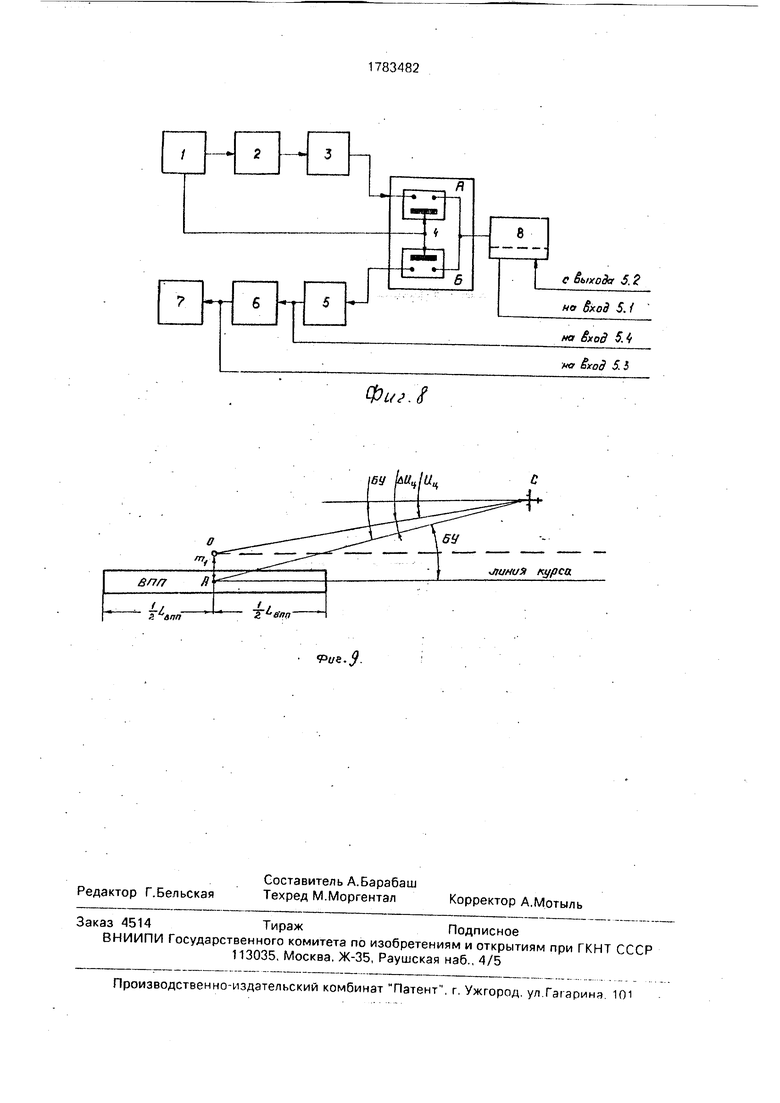
- модулятор; 3 - импульсный генератор СВЧ; 4 - антенный переключатель; 5 - приемник СВЧ; 6 - детектор; 7 - индикатор; 8 - антенное устройство (антенна и блок управления).
ПДУ 1 (фиг. 3) соединен с входом блока обработки сигналов 5, другие входы которого соединены с датчиком курса 2 и БРЛС 3, Блок обработки сигналов 5 имеет три выхода, два из которых соединены непосредст- венно с входами формирователя управляющих команд 7, причем один из выходов блока обработки сигналов 5 соединен с формирователем управляющих команд 7 через дифференцирующий блок 6, а третий выход соединен с БРЛС 3. Формирователь управляющих команд 7 соединен с датчиком скорости 4. Индикатор 8 соединен с выходом формирователя управляющих команд.
ПДУ 1 состоит из задатчика 1.1 и задат- чика 1.2 (фиг. 4), выходы которого соедине- ны с блоком 5, а органы управления расположены в кабине пилота.
. Блок обработки сигналов 5 (фиг. 5) вклю- чает в себя ряд элементов: последовательно соединенные первый сумматор 5.1, первый элемент сравнения 5 2, генератор пилообразного напряжения 5.4, элемент памяти 5.7 и второй сумматор 5.10, последователь- но соединенные задатчик расстояния между пассивный отражателем и взлетно-посадочной полосой 5.5 и делитель 5.8, последовательно соединенные третий сумматор 5.3 и элемент умножения 5.9, а также задатчик максимального углового уклонения 5.6, выход которого подключен к второму входу элемента умножения 5.9, соединенного выходом с первым выходом блока, второй вход второго сумматора 5.10 подключен к выходу делителя 5.8, а выход - к второму выходу блока, второй вход делителя 5.8 связан с выходом третьего сумматора 5.3, первый и второй входы которого соединены соответственно с первым и пя- тым входами блока, второй вход элемента сравнения 5.2 подключен к четвертому входу блока, а выход - к третьему выходу блока, первый вход первого сумматора 5.1 соединен с третьим входом блока, а второй вход - с вторым входом блока, шестой вход которого связан с вторым входом генератора пилообразного напряжения 5.4.
Блок формирования управляющего па- раметра 7 (фиг. 7) состоит из двух делителей 7.1 и 7.2 и вычитающего устройства 7,3, соединенных последовательно. Входы делителя 7.1 соединены с выходом блока обработки сигналов 5 и с датчиком скорости 4. Входы делителя 7.2 соединены с выходом делителя 7.1 и с выходом блока обработки сигналов 5. Входы вычитающего устройства 7.3 соединены с выходом делителя 7.2 и выходом дифференцирующего блока 6. Выход вычитающего устройства 7 3 соединен с индикатором 8,
Совместная работы БРЛС и заявленного устройства осуществляется следующим образом (фиг. 8). Синхронизатор 1 (представляющий собой импульсный генератор малой мощности), вырабатывая слабые импульсы, координирует работу всех блоков БРЛС и запускает импульсный генератор СВЧ 3. Генератор СВЧ 3 вырабатывает мощный зондирующий импульс, который подается на антенное устройство 8 с диаграммой направленности в горизонтальной плоскости в узкого луча. Зондирующий импульс представляет собой не единичный импульс, а короткую серию СВЧ-сигнала. Длину серии и частоту ее подачи определяет модулятор 2 в зависимости от выбора масштаба и режима работы БРЛС,
Антенна БРЛС является приемопередающей благодаря работе антенного переключателя 4, который попеременно подключает антенну к выходу генератора СВЧ 3 (когда нужно излучить зондирующий сигнал) и по входу приемника СВЧ 5 (когда нужно принять отраженный сигнал). Антенна БРЛС не является неподвижной, в связи с чем она содержит в своем составе блок управления, обеспечивающий, в частности, стажирование антенны в горизонтальной плоскости. С блока управления снимается сигнал, пропорциональный направлению луча антенны сигнал, поступающий в блок обработки сигнала заявленного устройства; туда также поступает сигнал от блока обработки сигнала заявленного устройства, изменяющий направление движения антенны при сканировании.
Принятый антенным устройством 8, отраженный от цели сигнал поступает на вход приемника СВЧ 5. С выхода приемника СВЧ 5 отраженный импульс поступает в блок обработки сигнала заявленного устройства, а также в детектор 6, где выделяется полезный сигнал, как правило на низкой частоте. С выхода детектора б сигнал, пропорциональный дальности до цели, поступает на индикатор БРЛС 7 и в блок обработки сигнала заявленного устройства.
Работа устройства осуществляется следующим образом (фиг. 9). При облучении БРЛС 3 отражателя 0, расположенного рядом с ВПП. в точке, равноудаленной от торцов, в блоке обработки сигналов измеряется курсовой угол цели Уц - угол между направлением курса посадки и направлением на отражатель 0. 8ц определяется по временной задержке между отраженным и опорным импульсами. Опорный импульс вырабатывается в момент совпадения направления луча антенны с направлением курса посадки, на основе сравнения данных БРЛС 3, ПДУ 1 и датчика курса 2.
Откорректированный сигнал, пропорциональный величине бокового уклонения (БУ), через дифференциальный блок 6 и непосредственно поступает в формирователь управляющих команд 7, вход которого соединен также с выходом блока обработки сигналов 5; туда же поступает сигнал от датчика скорости 4. На основе этих сигналов формируется управляющий параметр, пропорциональный первой производной по времени от бокового уклонения ВС от линии курса, и выдается на индикатор 8.
Более подробно рассмотреть работу блока обработки сигналов можно при помощи временных диаграмм (фиг. 6). Сигналы, пропорциональные текущему магнитному курсу полета 1 и направлению антенны БРЛС (при сканировании) 2, суммируются, образуя на выходе сумматора 5.1 (фиг. 5) сигнал, пропорциональный магнитному курсу направления луча антенны. Сигнал 3 подается на вход элемента сравнения 5.2, на второй вход которого подается величина МКп, пропорциональная магнитному курсу посадки.
Величины МКП и Lenn вырабатываемые задатчиками 1.1 и 1.2. задаются пилотом. Зздатчики 1.1 и 1.2 конструктивно расположены в одном корпусе и образуют ПДУ, который расположен в пилотской кабине.
В момент равенства сигналов на выходах элемента сравнения 5.2 вырабатывается опорный импульс 5, который подается на вход генератора пилообразного напряжения 5,4; на его второй вход подается импульс 6 от БРЛС 3 в момент получения отраженного сигнала от пассивного отражателя. Импульс 5 запускает генератор пилообразного напряжения 5.4. С этого момента напряжение на выходе генератора 5.4 начинает увеличиваться по линейному закону до момента поступления импульса б на второй вход генератора. В этот момент напряжение на выходе генератора 5.4 снова становится равным нулю до поступления следующего импульса 5 с выхода схемы сравнения 5.2. Таким образом, на выходе генератора 5.4 получается переменный сигнал вида 7 (фиг. 6). Однако элемент памяти 5.7 работает таким образом, что фиксирует только максимальную величину сигнала за один цикл работы генератора 5.4 и сохраняет ее на своем выходе (сигнал 8) до следующего цикла работы генератора, т.е. до следующей пары импульсов 5 и 6.
Физическим смыслом совместной работы генератора 5.4 и запоминающего устройства 5.10 является измерение временного интервала между импульсами 5 и 6, которому соответствует сигнал 8. Учитывая то, что угловая скорость сканирования луча антенны постоянна, временный интервал будет пропорционален величине угла между направлением магнитного курса посадки и направлением на отражатель, т.е. у цели 11ц. С БРЛС 3 снимается напряжение, пропорциональное расстоянию до цели 5Ц. которое подается на вход сумматора 5.3; на его второй вход подается напояжение, вырабатываемое задатчиком 1.2 ПДУ, пропорциональное длине ВПП (LBnn). Сигнал на выходе сумматора 5.3 пропорционален удалению до торца ВПП и подается на входы делителя 5.8 и элемента умножения 5.9.
На второй вход делителя 5 8 поступает
напряжение от задатчика 5.5. пропорциональное величине m const. Так как отражатель 0 расположен не на оси ВПП, а в стороне (фиг. 9), то измерение иц, а следовательно, и БУ будет произведено не относительно линии курса, а относительно линии, параллельной ей и проходящей через отражатель 0. Для компенсации образовавшейся погрешности используется величина m const. Ее физический смысл - расстояние
от отражателя 0 до оси ВПП. Величина напряжения гл выбирается таким образом, чтобы соотношение напряжений Бит было равным соотношению расстояний 5ци mi. В делителе 5.8 величина m делится на S, и на
его выходе вырабатывается сигнал, пропорциональный вышеописанной угловой погрешности, который суммируется с сигналом в сумматоре 5.10. На выходе сумматора 5.10 вырабатывается напряжение,
пропорциональное БУ ВС относительно линии курса.
В элементе умножения 5.9 производится вычисление величины Se - расстояния до
точки выхода на линию курса. SB рассчитывается на основе сигналов S и lmax const - максимального углового уклонения, вырабатываемого задатчиком 5.6. Физический смысл величины (max представляется как
тангенс максимально допустимого углового отклонения от линии курса. Максимальное допустимое угловое отклонение от линии курса определено в Указании МГА 3.1 - 48 от 28.08.79. Согласно этому документу величина ,032. Расчет величины SB сводится к перемножению величин S и Uax в элементе умножения 5.9, на выходе которого вырабатывается сигнал, пропорциональный Se, который поступает на выход блока обработки сигналов 5.
Для уменьшения дискретности счисления необходимо исключить сканирование антенны БРЛС в ненужных секторах. Полезным сектором сканирования является угол между направлением МКП и направлением на отражатель. С этой целью опорный импульс 5 с входа схемы сравнения 5.2 подается в блок управления антенной БРЛС, изменяя направление сканирования антенны на противоположное, Аналогично используется в схеме управления и отраженный от цели импульс. В случае совпадения этих импульсов во времени необходимо ограничить сканирования антенны в секторе ± 3° от направления МКП
С выхода блока обработки сигнала 5 (фиг, 3) сигнал, пропорциональный БУ, поступает на вход дифференцирующего блока б, где происходит его дифференцирование по времени:
ЦЈ-У-т
Сигнал пропорционален фактической скорости изменения БУ
Сигнал, пропорциональный величине SB, с выхода блока обработки сигналов 5 поступает на вход делителя 7 1 (фиг. 6), на второй вход которого поступает сигнал V от датчика скорости полета По этим двум сигналам рассчитывается время выхода на линию курса
-Т
При расчете величины tB по формуле (2) при больших БУ образуется некоторая погрешность ввиду того, что расстояние от ВС до расчетной точки выхода на линию курса несколько больше, чем расстояние SB. Однако при приближении В С к линии курса эта погрешность уменьшается и практически сводится к нулю при малых БУ, т.е именно в том месте, где требования к точности возрастают. Такое распределение точности вычисления гы вполне приемлемо и допускает использование формулы (2). По величине tu и БУ рассчитывается необходимая скорость изменения БУ, для того чтобы выйти на линию курса через время tB
%и является контрольным параметром, указывающим, какой должна быть скорость изменения БУ, для выхода на линию курса в зависимости от величины фактического БУ; в вычитающем устройстве 7 3 происходит сравнение контрольного сигнала Јк и фактического сигнала ;$, а разность их - управ- ляющий параметр X - подается на индикатор.
Введение новых узлов позволяет вычис лять первую производную по времени от БУ ВС относительно линии курса. Это дает возможность использовать в качестве упрявля- 5 ющего параметра скорость изменения БУ. переводя тем самым информацию о положении ВС из пространства координат в пространство скоростей, что уменьшает время реагирования пилота на возникающие БУ.
10 При использовании прототипа пилот имеет информацию о фактическом БУ относительно линии курса. Но управление ВС устроено так, что воздействуя на рычаги уп- равлен ия, пилот может изменять лишь ско15 рость изменения БУ, а не само БУ. Таким образом, получается несоответствие между способом управления и отображаемой информацией, которое вынуждает пилота постоянно дифференцировать в уме
20 показания индикатора.
При использовании предлагаемого устройства на индикаторе отображаются скорость изменения БУ, т.е. вышеуказанное несоответствие устраняется,
25 Пилот может считывать с индикатора информацию о том параметре, на который он воздействует непосредственно. Это обстоятельство значительно облегчает пилоту процесс управления в горизонтальной пло30 скости при заходе на посадку.
. Преимуществом предлагаемого устройства перед прототипом является также меньшее число пассивных отражателей, требуемых для работы устройства.
35Формула изобретения
45 а также пассивный отражатель, отличающееся тем, что, с целью повышения безопасности при посадке, оно содержит дифференцирующий блок, пульт дистанционного управления, датчик скорости и датчик курса,
50 подключенный выходом к третьему входу блока обработки сигналов, четвертый и пятый входы которого связаны соответственно с первым и вторым выходами пульта дистанционного управления, шестой вход 55 с третьим выходом бортовой радиолокационной станции, второй выход - с вторым входом формирователя управляющих команд и через дифференцирующий бло с третьим входом формирователя управлчю- щих команд, а третий выход - с управляющим входом бортовой радиолокационной станции, выход датчика скорости соединен с четвертым входом формирователя управляющих команд, причем пассивный отражатель расположен в точке, равноудаленной от торцов взлетно-посадочной полосы на расстояние не менее половины ширимы взлетно-посадочной полосы от ее бокового края,
Фиь 3 - ной полосой и делитель, последовательно соединенные третий сумматор и элемент умножения, а также задатчик максимального углового уклонения, выход которого подключей к второму входу элемента умножения, соединенного выходом с первым выходом блока, второй вход второго сумматора подключен к выходу делителя, а выход - к второму выходу блока, второй вход
делителя связан с выходом третьего сумматора, первый и второй входы которого соединены соответственно с первым и пятым входами блока, второй вход элемента сравнения подключен к четвертому входу блока,
а выход - к третьему выходу блока, первый вход с вторым входом блока, шестой вход которого связан с вторым входом генератора пилообразного напряжения.
иЯ fypCQ
flywrtt ипроёлекия § кабине nujtomt
S SJIOK 5 фиг Ч
t
N
-4 CO
CJ
i. oo
rO
я лпп
Фае. $
