Изобретение относится к авиационной технике, а именно к средствам контроля качества посадки летательных аппаратов.
Известно устройство для контроля качества посадки летательного аппарата (патент США N 3452697, кл, 114-43.5, 1969), содержащее видеомагнитофон и подключенные к нему передающую телекамеру, телевизионный приемник и пульт управления.
Такое устройство позволяет фиксировать перемещение летательного аппарата относительно взлетно-посадочной полосы, однако оно имеет недостаточную зону контроля и не обеспечивает требуемой оперативности и информативности.
Известна также наиболее близкая по технической сущности система предупредительной сигнализации о приближении к земле летательного аппарата (Aircraft ground proximiti warning system, патент Великобритании N 1479082, кл. B 7 W, 1977), содержащая датчик вертикального отклонения от эталонной траектории и блок вычисления скорости этого отклонения, датчик расстояния от летательного аппарата до начала взлетно-посадочной полосы, блок хранения параметров допустимых отклонений, анализатор допустимых отклонений и индикаторный блок, при этом датчик расстояния от летательного аппарата до начала взлетно-посадочной полосы подключен к командному входу блока хранения параметров допустимых отклонений, датчик вертикального отклонения от эталонной траектории и блок вычисления скорости этого отклонения подключены к первому входу анализатора допустимых отклонений, второй вход которого соединен с блоком хранения параметров допустимых отклонений, а выход - с индикаторным блоком.
Такая система позволяет автоматически распознавать особую ситуацию и выдавать аварийный сигнал, т.е. ранжировать полетные ситуации на опасные и безопасные. Однако известная система не позволяет оценить "запас безопасности" на заключительном этапе полета, не выдает информации о качестве посадки.
Целью изобретения является повышение информативности контроля качества посадки летательного аппарата в продольном движении путем обеспечения адекватной индикации оценок пилотирования.
Для этого в известной системе, содержащей датчик вертикального отклонения от эталонной траектории и блок вычисления скорости этого отклонения, датчик расстояния от летательного аппарата до начала взлетно-посадочной полосы, блок хранения параметров допустимых отклонений, анализатор допустимых отклонений и индикаторный блок, при этом датчик расстояния от летательного аппарата до начала взлетно-посадочной полосы подключен к командному входу блока хранения параметров допустимых отклонений, датчик вертикального отклонения от эталонной траектории и блок вычисления скорости этого отклонения подключены к первому входу анализатора допустимых отклонений, второй вход которого соединен с блоком хранения параметров допустимых отклонений, а выход - с индикаторным блоком, блок хранения параметров допустимых отклонений снабжен первым и вторым выходами, а анализатор допустимых отклонений состоит из блока перемножения текущих параметров отклонения, трех блоков сравнения, каждый из которых связан с множителем, формирующим граничные значения одной из трех допустимых областей параметров отклонения, трех коммутаторов, обеспечивающих выполнение сравнения в каждой из трех допустимых областей параметров отклонения, индикаторов оценок "отлично", "хорошо", "удовлетворительно", управляемых коммутаторами, при этом первый множитель своим входом соединен со вторым выходом блока хранения параметров допустимых отклонений, а выходом - с первым входом первого блока сравнения и с входом второго множителя, первый коммутатор своим первым входом соединен с выходом второго множителя, вторым входом - с командным входом блока хранения параметров допустимых отклонений, первым выходом этот же коммутатор соединен с входом третьего множителя и первым входом второго блока сравнения, вторым выходом - с индикатором оценки "отлично", а управляющим входом - с выходом первого блока сравнения, второй коммутатор своим первым входом соединен с выходом третьего множителя, вторым входом - с выходом первого блока сравнения, первым выходом этот же коммутатор соединен с первым входом третьего блока сравнения, выход которого соединен с индикаторным блоком, второй выход второго коммутатора соединен с индикатором оценки "хорошо", а управляющий вход - с выходом второго блока сравнения, третий коммутатор своим входом соединен с выходом второго блока сравнения, выходом - с индикатором оценки "удовлетворительно", а управляющим входом - с выходом третьего блока сравнения, блок перемножения своим первым входом соединен с первым выходом блока хранения параметров допустимых отклонений, а вторым входом - с выходами датчика вертикального отклонения от эталонной траектории и блока вычисления скорости этого отклонения, причем выход блока перемножения соединен со вторыми входами первого, второго и третьего блоков сравнения.
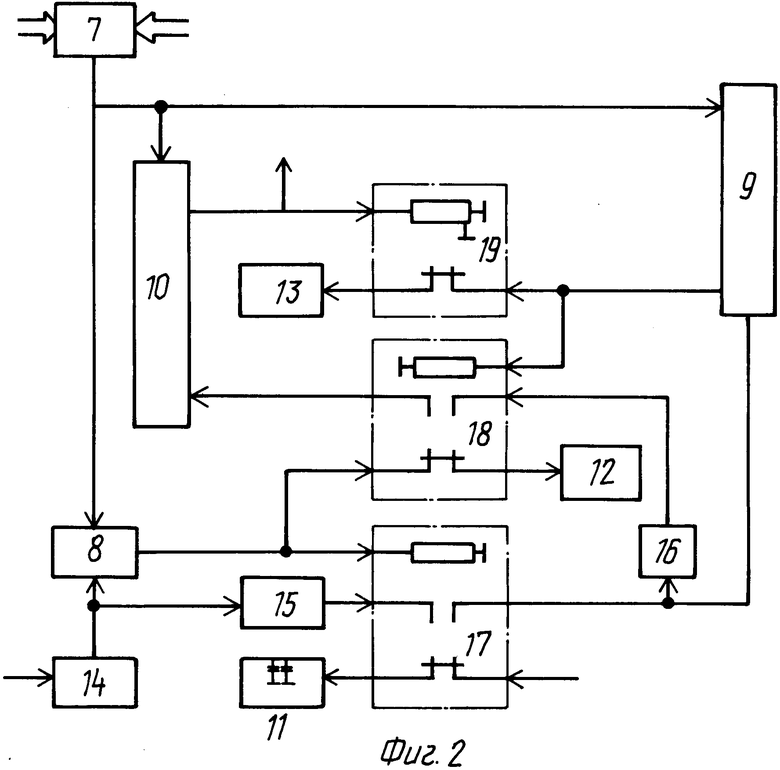
На фиг. 1 представлена функциональная схема системы; на фиг. 2 - структурная схема анализатора допустимых отклонений.
Система для контроля качества посадки летательного аппарата (фиг. 1) содержит датчик вертикального отклонения от эталонной траектории 1, блок вычисления скорости этого отклонения 2, анализатор допустимых отклонений 1, датчик расстояния между самолетом и началом взлетно-посадочной полосы 4, блок хранения набора параметров допустимых отклонений 5, индикаторный блок 6.
Анализатор допустимых отклонений 5 (фиг. 2) содержит блок перемножения текущих параметров отклонения 7, первый 8, второй 9 и третий 10 блоки сравнения, индикаторы оценок "отлично" 11, "хорошо" 12, "удовлетворительно" 13, первый 14, второй 15, третий 16 множители, первый 17, второй 18 и третий 19 коммутаторы.
Блок хранения параметров допустимых отклонений 5 снабжен первым и вторым выходами. Датчик вертикального отклонения от эталонной траектории 1 соединен с блоком вычисления скорости этого отклонения 2, причем выходы обоих соединены с первым входом анализатора допустимых отклонений 3,второй вход анализатора допустимых отклонений 3 соединен выходом с блоком хранения набора параметров допустимых отклонений 5, связанным командным входом с датчиком 4 расстояния между самолетом и началом взлетно-посадочной полосы. К выходу анализатора допустимых отклонений 3 подключен индикаторный блок 6
Анализатор допустимых отклонений (фиг. 2) состоит из блока перемножения текущих параметров отклонения 7, трех блоков сравнения 8, 9, 10, каждый из которых связан с соответствующим множителем 14, 15, 16 и трех коммутаторов 17, 18, 19, управляющих индикаторами оценок "отлично" 11, "хорошо"12, "удовлетворительно" 13. Первый множитель 14 своим входом соединен со вторым выходом блока хранения параметров допустимых отклонений 5, а выходом - с первым входом первого блока сравнения 8 и с входом второго множителя 15. Первый коммутатор 17 своим первым входом соединен с выходом второго множителя 15, вторым входом - с командным входом блока хранения параметров допустимых отклонений 5. Первый выход коммутатора 17 соединен с входом третьего множителя 16 и первым входом второго блока сравнения 9. Второй выход коммутатора 17 связан с индикатором оценки "отлично" 11, а управляющий вход - с выходом первого блока сравнения 8. Второй коммутатор 18 своим первым входом соединен с выходом третьего множителя 16, вторым входом - с выходом первого блока сравнения 8. Первый выход коммутатора 18 соединен с первым входом третьего блока сравнения 10, выход которого соединен с индикаторным блоком 6. Второй выход второго коммутатора 18 соединен с индикатором оценки "хорошо" 12, а управляющий вход - с выходом второго блока сравнения 9. Третий коммутатор 19 своим входом соединен с выходом второго блока сравнения 9, выходом - с индикатором оценки "удовлетворительно" 13, а управляющим входом - с выходом третьего блока сравнения 10. Блок перемножения 7 своим первым входом соединен с первым выходом блока хранения параметров допустимых отклонений 5, а вторым входом - с выходами датчика вертикального отклонения от эталонной траектории 1 и блока вычисления скорости этого отклонения 2. Выход блока перемножения 7 соединен со вторыми входами первого 8, второго 9 и третьего 10 блоков сравнения.
Индикаторы оценок "отлично" 11, "хорошо" 12 и "удовлетворительно" 13 выполнены в виде цифровых индикаторов. Первый 17 и второй 18 коммутаторы выполнены в виде реле с двумя парами контактов, одна из которых нормально замкнутая, а другая - нормально разомкнутая. Третий коммутатор 19 выполнен в виде реле с нормально замкнутыми контактами. Коэффициенты усиления для первого 14, второго 15 и третьего 16 множителей соответственно равны 1/3, 2, 3/2.
Система работает следующим образом. Области допустимых отклонений Mk = M(L) предварительно рассчитываются для ряда дискретных значений удаления от начала взлетно-посадочной полосы. Описание границ этих областей хранится в блоке 5 хранения набора параметров допустимых отклонений. Как удаления Lk, измеряемого датчиком расстояния между самолетом и началом взлетно-посадочной полосы 4, подается на адресную шину блока 5 и выбирает данные, характеризующие одну из областей M, соответствующую текущей дальности L с ошибкой, не превышающей интервал квантования. Вектор отклонений  формируется датчиком вертикального отклонения от эталонной траектории 1 и блоком вычисления скорости этого отклонения 2. В анализаторе 3 проверяется условие возможности продолжения захода на посадку
формируется датчиком вертикального отклонения от эталонной траектории 1 и блоком вычисления скорости этого отклонения 2. В анализаторе 3 проверяется условие возможности продолжения захода на посадку
x ∈ Mк (1)
означающее, что отклонения не превышают предельно допустимых, и оценивается качество пилотирования на посадке, т.е. "запас безопасности" с адекватной полетной ситуацией индикацией оценок техники пилотирования. При нарушении условия (1) срабатывает индикаторный блок 6 сигнализации ухода на второй круг. Проверка условия (1) и оценка качества посадки осуществляется следующим образом. Области допустимых отклонений Mk в двумерном пространстве аппроксимируются многоугольниками. Для внутренних точек многоугольника, т.е. точек, удовлетворяющих условию (1), справедлива система неравенств
aix < ρi, i = 1,...,n (2)
где
ai - единичный вектор нормали к I-й грани многоугольника;
ρi - полярное расстояние этой грани до начала координат;
aix - скалярное произведение векторов;
n - число граней многоугольника.
Тогда из условия равномерного нормирования области различным оценкам техники пилотирования будет соответствовать выполнение различных условий
при 0 ≤ aix < 1/3ρi - оценка "отлично";
при 1/3ρi≤ aix < 2/3ρi - оценка "хорошо";
при 2/3ρi≤ aix < ρi - оценка "удовлетворительно";
при aix ≥ ρi срабатывает индикаторный блок 6 сигнализации ухода на второй круг.
Составляющие векторов ai передаются из блока 5 хранения параметров набора допустимых отклонений на вход блока 7 перемножения, на второй вход которого подается вектор текущих отклонений X. На выходе блока перемножения получается код скалярного произведения aix. Величины ρi выбираются из блока 5 хранения набора параметров допустимых отклонений. С выхода первого множителя 14 сигнал, пропорциональный 1/3 ρi, подается на первый вход первого блока сравнения 8, на второй вход которого подается сигнал aix с выхода блока перемножения 7. При условии 0 ≤ aix < 1/3ρi выход первого блока сравнения 8 находится в состоянии логического нуля, при этом осуществляется индикация оценки "отлично" через нормально замкнутую пару контактов первого коммутатора 17. В противном случае, например, при 1/3ρi≤ aix < 2/3ρi выход первого блока сравнения 8 переходит в состояние логической единицы, подается сигнал на управляющий вход первого коммутатора 17 и через нормально замкнутую пару контактов второго коммутатора 18 на индикатор оценки "хорошо". В силу отмеченного размыкается нормально замкнутая пара контактов и замыкается нормально разомкнутая пара контактов первого реле 17, т.е. прекращается индикация оценки "отлично", производится индикация оценки "хорошо" и на первый вход второго блока сравнения 9 поступает сигнал, пропорциональный 2/3 ρi . При увеличении вектора отклонений x (2/3ρi≤ aix < ρi) выход второго блока сравнения 9 переходит в состояние логической единицы, прекращается индикация оценки "хорошо", производится индикация оценки "удовлетворительно" и сигнал, пропорциональный ρi, с третьего множителя 16 через замкнутую пару контактов второго коммутатора 18 поступает на первый вход третьего блока сравнения 10. При aix ≥ ρi выход третьего блока сравнения 10 переходит в состояние логической единицы, подается сигнал на управляющий вход третьего коммутатора 19 и на вход индикаторного блока 6, что приводит к прекращению индикации оценки "удовлетворительно" и срабатыванию сигнализации ухода на второй круг.
Таким образом, предлагаемая система позволяет не только ранжировать полетные ситуации на опасные и безопасные, но и оценить "запас безопасности" на заключительном этапе полета с индикацией адекватных оценок техники пилотирования в продольном канале управления.
Введение индикаторов оценок "отлично", "хорошо", "удовлетворительно", трех множителей, коммутаторов и соответствующих им блоком сравнения в известную систему позволяет формировать объективные количественные критерии точности пилотирования летательного аппарата при посадке в продольном канале управления, что существенно повышает информативность, а следовательно, и объективность контроля.
Положительный эффект, создаваемый совокупностью названных признаков, определяется существенным повышением точности, достоверности и оперативности оценки качества посадки, а также возросшей возможностью парирования аварийных ситуаций на заключительном этапе полета.
Использование: изобретение относится к авиационной технике, а именно к средствам контроля качества посадки летательных аппаратов. Сущность изобретения: система содержит датчик вертикального отклонения от эталонной траектории и блок вычисления скорости этого отклонения, подключенные к первому входу анализатора допустимых отклонений, второй вход которого соединен с блоком хранения набора параметров допустимых отклонений, связанным командным входом с датчиком расстояния между летательным аппаратом и началом взлетно-посадочной полосы, а выход - с индикаторным блоком. Согласно изобретению анализатор допустимых отклонений выполнен из блока перемножения, первой схемы сравнения, второй схемы сравнения, индикаторов оценок "отлично" и "хорошо", последовательно соединенных первого множителя, второго множителя, первого коммутатора, третьего множителя, второго коммутатора, третьей схемы сравнения, третьего коммутатора и индикатора оценки "удовлетворительно".Особо организованная связь между схемами позволяет формировать количественные оценки точности пилотирования летательного аппарата при посадке. 2 ил.
Система для контроля качества посадки летательного аппарата, содержащая датчик вертикального отклонения от эталонной траектории и блок вычисления скорости этого отклонения, подключенные к первому входу анализатора допустимых отклонений, второй вход которого соединен с блоком хранения набора параметров допустимых отклонений, связанным командным входом с датчиком расстояния между летательным аппаратом и началом взлетно-посадочной полосы, а выход - с индикаторным блоком, отличающаяся тем, что анализатор допустимых отклонений выполнен из блока перемножения, первой схемы сравнения, второй схемы сравнения, индикаторов оценок "отлично" и "хорошо", последовательно соединенных первого множителя, вход которого соединен с вторым входом блока хранения выбора параметров допустимых отклонений, второго множителя, первого коммутатора, второй выход которого соединен с входом индикатора оценки "отлично", а управляющий и второй входы - с выходом первой схемы сравнения и командным входом блока хранения набора параметров допустимых отклонений соответственно третьего множителя, второго коммутатора, второй выход которого соединен с индикатором оценки "хорошо", а второй вход - с выходом первой схемы сравнения, третьей схемы сравнения, третьего коммутатора и индикатора оценки "удовлетворительно", при этом выход блока перемножения, второй вход которого соединен соответственно с выходами датчика вертикального отклонения от эталонной траектории и блока вычисления скорости этого отклонения, а первый - с первым выходом блока хранения набора параметров допустимых отклонений, соединен с вторыми входами первой, второй и третьей схем сравнения, первые входы первой и второй схем сравнения соединены соответственно с выходом первого множителя и первым выходом первого коммутатора, управляющий вход второго коммутатора и второй вход третьего коммутатора соединены с выходом второй схемы сравнения, а индикаторный блок соединен с выходом третьей схемы сравнения.
| GB, заявка N 1479082, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
