Изобретение относится к измерительной технике и может быть использовано для определения угловой ориентации подвижных объектов (судов, самолетов, измерителей направления и скорости потоков, устанавливаемых в точке и буксируемых, зондирующих приборов и т.п.).
Известны гироскопические устройства угловой ориентации [1]
Их недостатком является заметное возрастание погрешностей измерений, осуществляемых в условиях возмущений, как от воздействия их на чувствительный элемент, так и за счет возрастания кардановой ошибки вследствие невозможности снятия отсчета в плоскости горизонта.
Эти недостатки частично удается уменьшить при использовании гиростабилизированных платформ вместо карданова подвеса прибора. Однако в условиях сильных возмущений погрешности во многих случаях становятся недопустимо большими и выявить их величину не удается.
Известно устройство азимутальной ориентации, содержащее основание, блок азимутальной ориентации объекта, выполненный в виде установленных в корпусе двух соосных противоположно вращающихся, нереверсивных лопастных винтов со скрепленными с ними модуляторами света и вертикальной осью вращения, совмещенной с осью, проходящей через точку подвеса основания, и блок фиксации моментов совмещения модуляторов света с диаметральной плоскостью корпуса, двухканальный блок обработки с переключателем, генератором тактовых импульсов, делителем частоты, сумматором и регистром и последовательно соединенные дешифратор и индикатор [2]
Его недостатком является возрастание погрешностей при наличии углов крена и дифферента основания устройства, что ограничивает область его применения условиями, когда такие возмущения пренебрежимо малы, либо с целью уменьшения их использовать гиростабилизированные платформы, что усложняет конструкцию устройства, увеличивает массу и стоимость его, как за счет этих дополнительных устройств, так и за счет используемых для этого энергоносителей и расхода энергии.
Целью изобретения является повышение точности измерений за счет уменьшения влияния ошибок, обусловленных наклонами и вибрацией основания.
Цель изобретения достигается тем, что оно снабжено двумя блоками угловой ориентации, двумя дополнительными двухканальными блоками обработки и двумя исполнительными механизмами углового перемещения основания в двух взаимно перпендикулярных плоскостях, каждый из которых подключен к выходу регистра соответствующего блока угловой ориентации, при этом блоки угловой ориентации выполнены идентично блоку азимутальной ориентации, оси вращения их лопастных винтов ортогональны между собой и осью вращения лопастных винтов блока азимутальной ориентации, а регистры каждого двухканального блока обработки подключены к введенному блоку вычисления и введения поправок на наклон, выход которого по дключен к дешифратору.
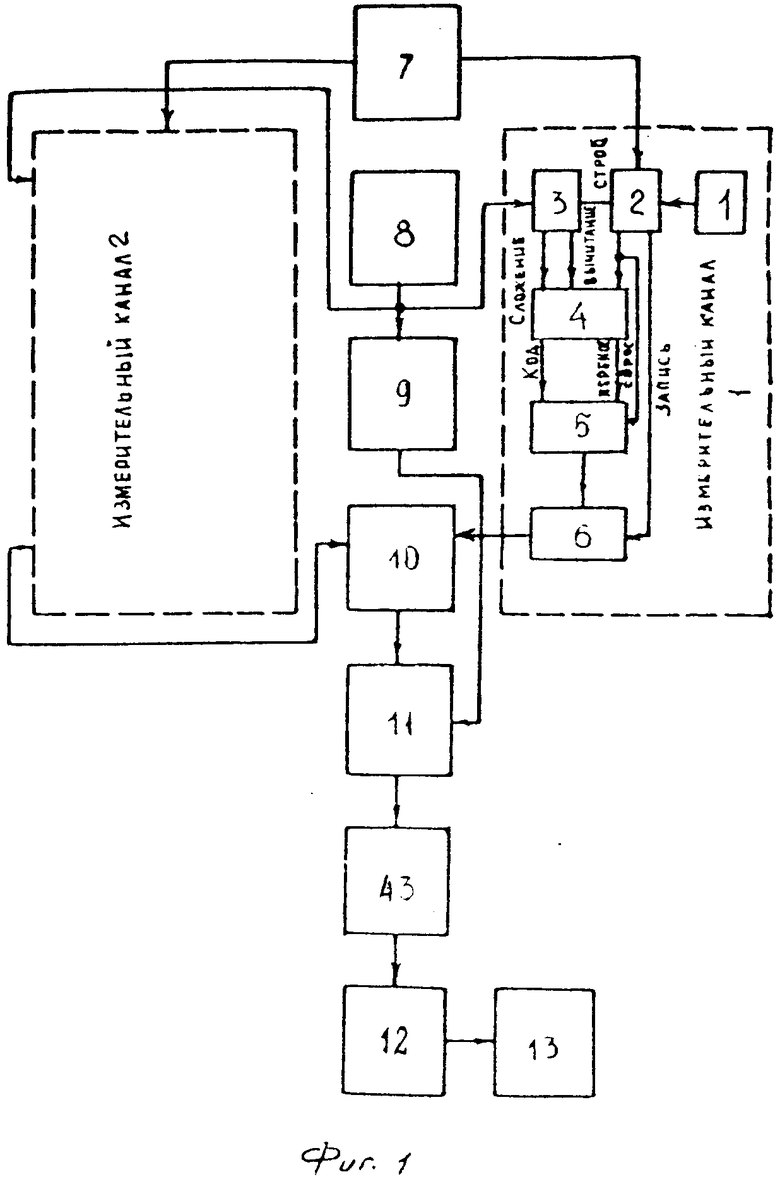
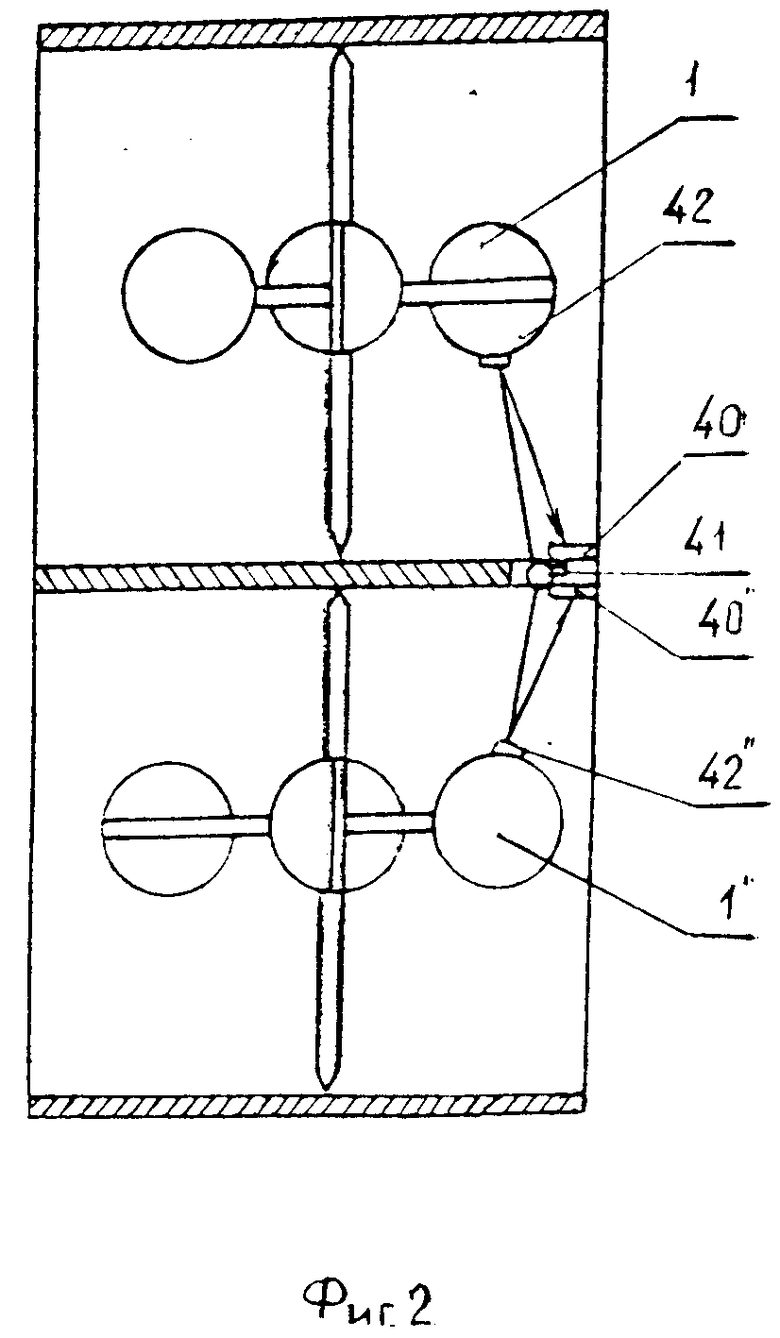
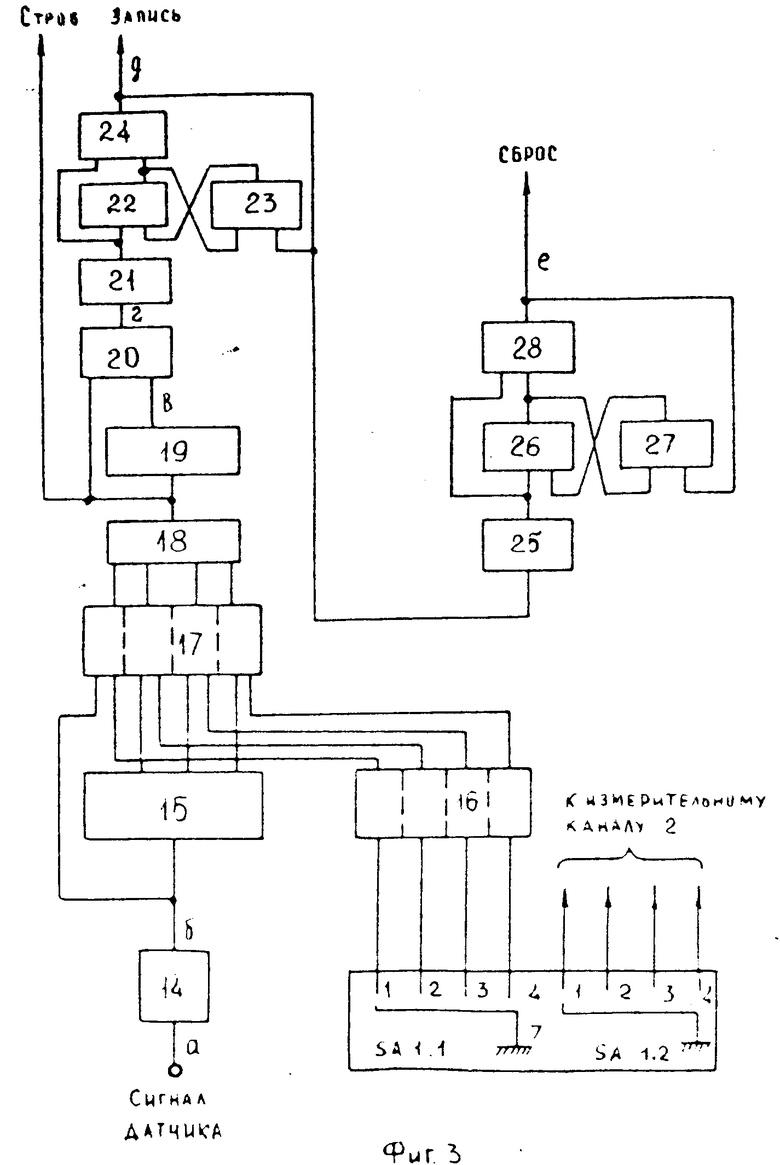
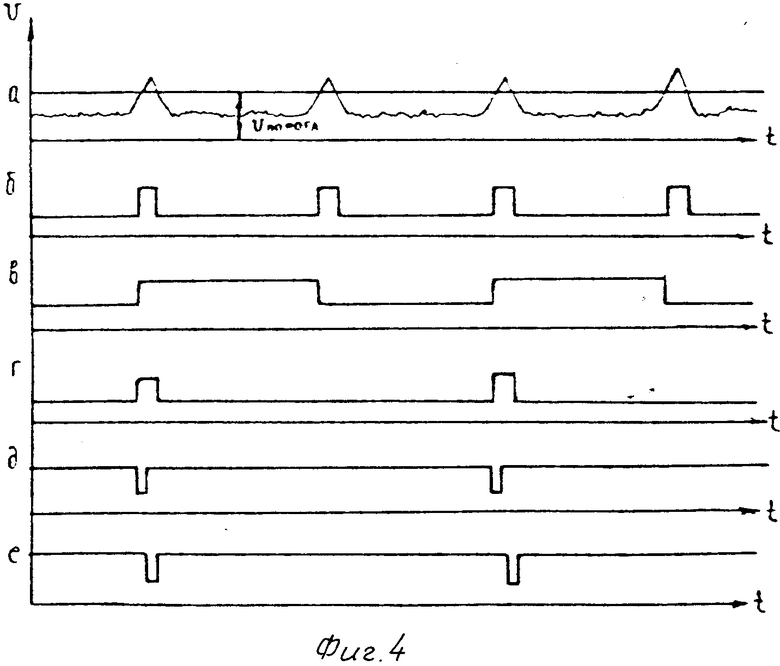
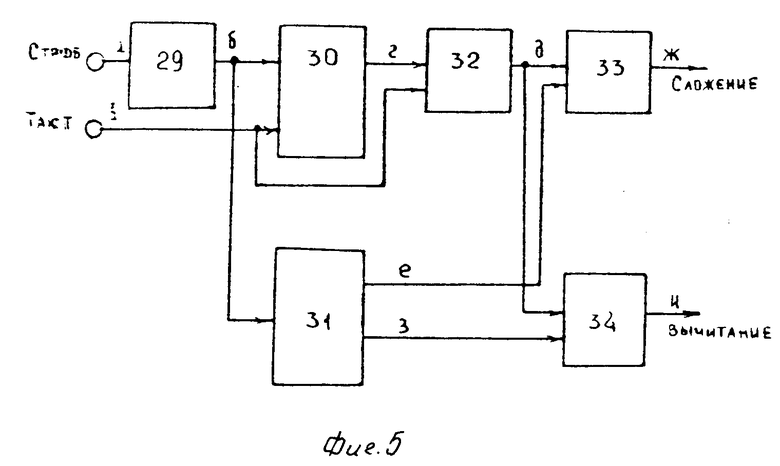
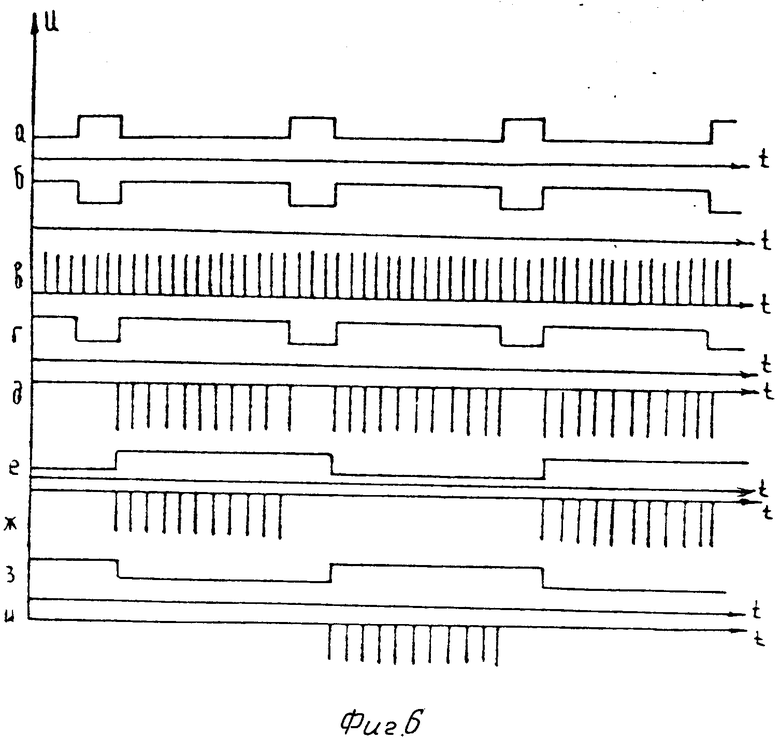
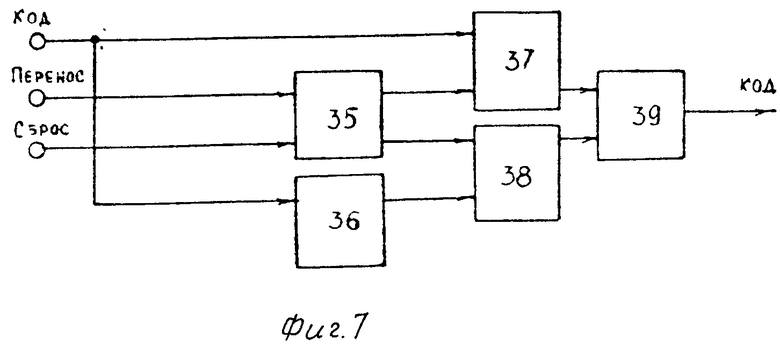
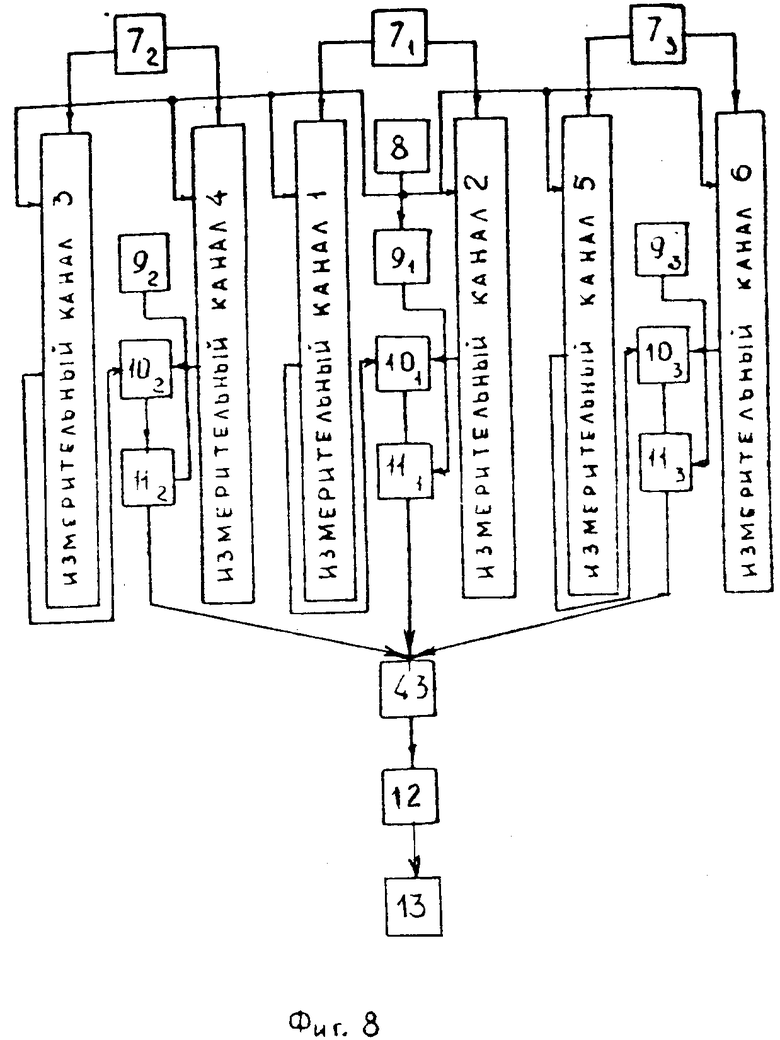
На фиг. 1 представлена структурная схема измерительного канала азимута; на фиг. 2 блок чувствительных элементов канала азимута нереверсивных лопастных винтов; на фиг. 3 структурная схема формирователя импульсов; на фиг. 4 временные диаграммы работы формирователя импульсов; на фиг. 5 структурная схема блока привязки; на фиг. 6 временные диаграммы блока привязки; на фиг. 7 структурная схема инвертора кода; на фиг. 8 структурная схема каналов измерения углов отклонения азимута, крена и дифферента основания от исходных; на фиг. 9 функциональная схема вычислительного устройства; на фиг. 10 блок-схема алгоритма обработки информации в вычислительном устройстве.
Устройство для определения угловой ориентации содержит шесть идентичных измерительных каналов, поэтому цифры с индексами, содержащиеся в скобках, обозначают элементы и узлы пяти дополнительных каналов. Поскольку имеются элементы, функционирующие в единственном числе в составе двух каналов, число индексов уменьшается в таких случаях до трех, а в случаях, когда элемент содержится в устройстве в единственном числе, индексы отсутствуют.
Устройство для определения угловой ориентации содержит чувствительные элементы 1, (12) с вертикальной осью вращения, I3(I4) с горизонтальной осью вращения, совпадающей с перпендикулятором к осевому сечению объекта, а 15(I6) тоже с горизонтальной осью вращения, но совпадающей с осевым сечением объекта, формирователи 21, (22, 23, 24, 25, 26) импульсов, блоки 31 (32-36), привязки, реверсивные счетчики 41(42-46), инверторы 51 (52-56) кода и регистры 61 (62-66), а также общие для двух каналов переключатели 71 (72 и 73) генератор 8 тактовых импульсов, делитель 91 (92 и 93) частоты, сумматоры 101 (102 и 103), регистры 111 (112 и 113), дешифратор 12, индикатор 13 и вычислительное устройство 43.
Каждый формирователь 21 (22-26) импульсов (фиг. 3) состоит из триггеров Шмитта 141 (142-146), делителей 151 (152-156) частоты, инверторов 161 (162-166), двухвходовых элементов И-НЕ 171 (172-176), четырехвходовых элементов И-НЕ 181 (182-186), триггеров 191 (192-196), двухвходовых логических элементов И-НЕ 201 (202-206), инверторов 211(212-216), триггеров 221-231 (222-232, 223-233, 224-234, 225-235, 225-235, 226-236), элементов
И-НЕ 241(242-246), инверторов 251(252-256), триггеров 261-271 (262-272,
263-273, 264-274, 265-275, 266-276) и элементов И-НЕ 281 (282-286). Блок привязки (фиг. 5) состоит из инверторов 291 (292-296) D-триггеров 301 (302-306), триггеров 311(312-316) и элементов И-НЕ 321(322-326), 331
(332-336), 341 (342-346).
Каждый инвертор 51 (52-56) кода (фиг. 7) состоит из триггеров 351(352-356), инверторов 361 (362-366), и элементов И-НЕ 371 (372-376),
381(382-386), 391 (392-396).
На корпусе устройства установлены (фиг. 2) фотоприемники 401(402-406) шести измерительных каналов, осветитель 41, а на нереверсивных лопастных винтах 1 соответственно отражатели 421 (422-426).
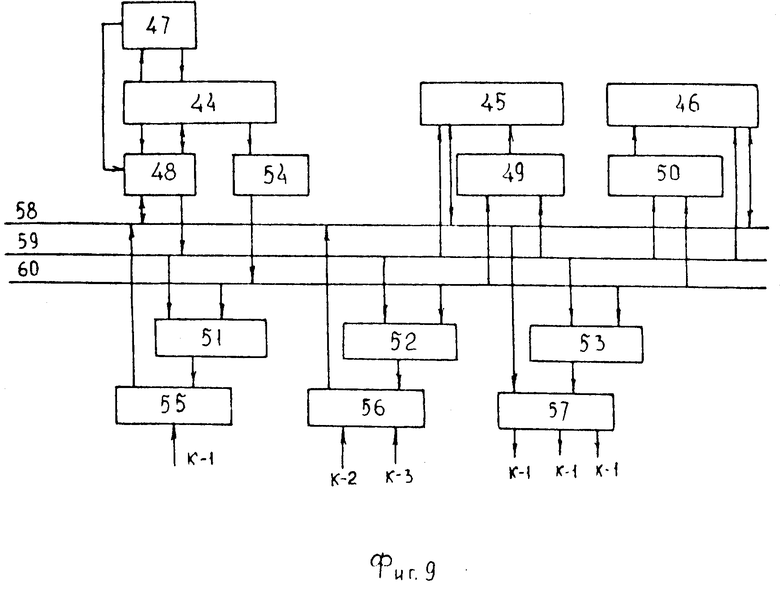
Вычислительное устройство 43 (фиг. 9) содержит центральный процессор 44, постоянное запоминающее устройство 45, оперативное запоминающее устройство 46, генератор тактовых импульсов 47, системный контроллер 48 и дешифраторы выбора устройств 49-53, буферное устройство 54, параллельные интерфейсы 55-57, а также три шины 58-60 (соответственно шину данных, шину команд и шину адреса).
Устройство для определения угловой ориентации работает следующим образом.
Чувствительные элементы 11 (12-16) под действием набегающего потока вращаются во встречных направлениях, фиксируя в момент совмещения каждой пары величину угла отклонения объекта в соответствующей плоскости в трех ортогонально расположенных плоскостях. Для фиксации момента совмещения чувствительных элементов с диаметральной плоскостью прибора (и двух других осей объекта) используются фотоприемники 401 (402, 403, 404, 405, 406) и отражатели 421 (422-426), прикрепленные к чувствительным элементам 11 (12-16) Сигналы фотоприемников поступают в формирователи 21(22-26), на триггеры 141 (142-146), Шмитта, преобразующие их в импульсы с крутыми фронтами, что необходимо для надежной работы цифровых элементов всего устройства, далее сигналы поступают на делители 151(152-156) частоты и логические элементы И-НЕ 171 (172-176). Выходы делителей 151 (152-156) также подаются на логические элементы И-НЕ 171(172-176). С помощью переключателей 71 (72, 73) выбирают один из четырех вентилей, входящих в состав логических элементов И-НЕ 171 (172-176), подавая на вход инверторов 161 (162-166), потенциал, соответствующий уровню логического нуля. При положении "1" переключателей 71 (72 и 73) на выходе логических элементов И-НЕ 181 (182-185, 186), появляются импульсы триггеров 141 (142-146) Шмитта. С выходов элементов И-НЕ 181(182-186) сигналы "строб" поступают на блоки 31 (32-36) привязки и, для последующего формирования сигналов, на входы триггеров 191 (192-196).
С помощью логических элементов И-НЕ 201 (202-206), 241 (242-246), триггеров 221-231 (222-232, 223-233, 224-234, 225-235, 226-236) и инверторов 211 (212-216) формируется сигнал "запись", соответствующий фронту сигнала "строб", а с помощью инверторов 251 (252-256), триггеров 261-271 (262-272, 263-273, 264-274, 265-275, 266-276) и элементов И-НЕ 281 (282, 283, 284, 285, 286), формируется сигнал "Сброс", соответствующий срезу сигнала "Строб". Сигнал "Запись" поступает в регистры 61 (62-66) и приводит к записи кода, поступающего на информационные входы регистров 61 (62-66). Сигнал "Сброс" поступает на реверсивные счетчики 41 (42-46) и инверторы 51 (52, 53, 54, 55, 56) кода и служит для установки реверсивных счетчиков 41 (42, 43, 44, 45, 46) и инверторов 51 (52-56) кода в исходное состояние. Сигнал "Строб" поступает на блоки 31 (32-36) привязки, на второй вход которого подаются импульсы генератора 8 тактовых импульсов.
На выходе блоков 31 (32-36) привязки формируются пачки импульсов генератора 8 тактовых импульсов, длительность этих пачек равна интервалам времени между импульсами на выходе элементов И-НЕ 181(182-186). С выходов блоков привязки эти пачки импульсов поступают поочередно на выходы сложения и вычитания реверсивных счетчиков 41(42-46), которые затем устанавливаются в нулевое состояние сигналом "Сброс" формирователей импульсов 21 (22-26) из каждого второго импульса с выхода элементов И-НЕ 181 (182-186).
После обнуления реверсивных счетчиков 41 (42-46) в них снова подсчитывается первая пачка импульсов, пришедшая после сигнала "Сброс" в режиме сложения, а вторая пачка в режиме вычитания. В результате к приходу следующего сигнала "Сброс" реверсивные счетчики 41 (42-46) содержат код разности пачек импульсов. Работа четных измерительных каналов (2, 4 и 6) идентична работе нечетных (1, 3 и 5) за единственным исключением их чувствительные элементы (12, 44 и 16) вращаются в направлении, противоположном направлению вращения чувствительных элементов (11, 13 и 15).
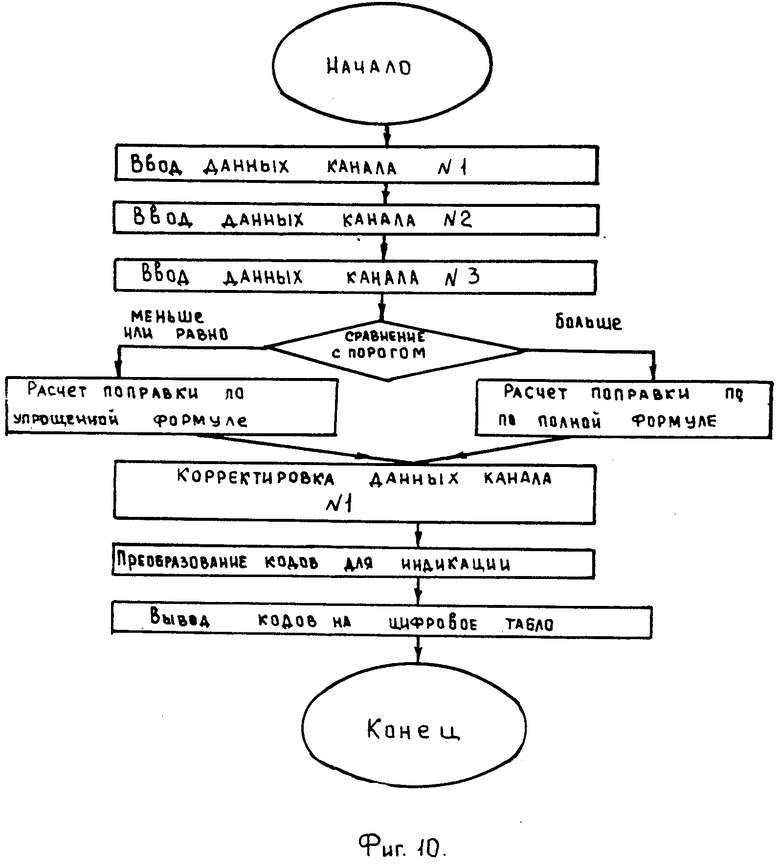
При неподвижном подвесе чувствительных элементов обе пачки импульсов равны по длительности, следовательно, в реверсивных счетчиках 41 (42-46) после цикла "Сложение-вычитание" двух пачек импульсов записывается код нуля. При развороте подвесов чувствительных элементов 11 (12-16) пачки импульсов отличаются в зависимости от направления разворота либо одна больше, либо другая. После цикла измерения в реверсивных счетчиках 41 (42-46) образуется код, соответствующий углу разворота подвеса чувствительного элемента 11 (12-16) в соответствующей плоскости измерений. Полученные коды поступают на инверторы 51 (52-56) кода, на них же поступают сигналы "Перенос" счетчиков 41 (42-46) и "Сброс" формирователей 21 (22-26). В зависимости от наличия или отсутствия сигналов "Перенос" счетчиков 41 (42-46) инверторы 51 (52-56) кода либо инвертируют, либо не инвертируют коды счетчиков 41 (42-46). После этого коды поступают на регистры 61 (62-66) и с помощью сигналов "Запись", поступающих с формирователей 21 (22-26), записываются в него. Таким образом, в регистры 61 (62-66) записываются для каждой пары коды, одинаковые по величине, но противоположные по знаку. В сумматорах 101(102 и 103) коды четных измерительных каналов вычитаются из кодов нечетных измерительных каналов. Следовательно, в регистры 111 (112 и 113) индикации с сумматоров 101 (102 и 103) поступают удвоенные значения углов поворота подвеса (корпуса). Делители 91 (92 и 93) частоты обеспечивают необходимую частоту смены информации на индикаторе 13. Коды измеренных величин с трех каналов устройства (фиг. 10) поступают на параллельные интерфейсы 55 и 56. Программа работы вычислительного устройства 43 содержит команды опроса интерфейсов 55 и 56, во время которых каждый канал передает коды измеренных величин на шину данных 58 и через нее в оперативное запоминающее устройство 46. Измерительные каналы опрашиваются поочередно, коды запоминаются в оперативном запоминающем устройстве 46 на время обработки результатов измерений трех парных каналов устройства. После ввода кодов вычислительное устройство переходит к анализу введенных величин, по результатам которого обработка полученной информации производится по упрощенной или полной формуле.
Исправленные значения, преобразованные в двоично-десятичные коды, через интерфейс 57 выдаются на индикацию, например, на индикатор 13, хотя в ряде случаев (например, в автономных измерительных приборах) удобнее может оказаться индикация в печатном виде.
При невысоких требованиях к точности ориентации карданова погрешность в азимутальной плоскости вычисляется по формуле
γ Ψк θк, где γ- карданова погрешность;
Ψк θк углы крена и дифферента в системе, связанной с объектом (для корабля в корабельной системе).
Это существенно уменьшает объем вычислений в блоке 43.
При более высоких требованиях к точности вычисления осуществляют по формуле
sin γ sin Ψк sin θк, Вычисление поправок для других плоскостей измеряемых углов осуществляется по аналогичным формулам.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ | 1991 |
|
RU2042113C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ПОТОКА | 1991 |
|
RU2026554C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ТЕЧЕНИЙ | 1979 |
|
RU946355C |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| Прибор для измерения течений | 1977 |
|
SU697933A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1985 |
|
SU1840927A1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| Устройство для определения углового положения указателя стрелочных приборов | 1987 |
|
SU1532812A1 |
Область использования: измерительная техника для ориентации подвижных объектов в условиях наличия углов крена и дифферента. Цифровое устройство азимутальной ориентации содержит два нереверсивных лопастных винта с вертикальной осью вращения, проходящей через точку подвеса прибора, причем направления их вращения взаимно противоположны, узел обработки сигналов, включающий формирователи импульсов, блок привязки импульсивных сигналов, реверсивные счетчики, инверторы кода, переключатели, генератор тактовых импульсов, делители импульсивных сигналов, сумматор, регистр индикации, дешифратор, а также дополнительно два аналогичных измерительных канала, чувствительные элементы которых устанавливаются в горизонтальной плоскости таким образом, чтобы оси вращения этих двух пар нереверсивных лопастных винтов в ней были взаимно препендикуляры, причем оси одной из этих пар параллельны осевому сечению объекта, микропроцессор, вычисляющий поправки азимута, обусловленные креном и дифферентом устройства, а также регистор, выполненый, например, в виде индикатора. 10 ил.
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ объекта, содержащее основание, блок азимутальной ориентации, выполненный в виде установленных в корпусе двух соосных противоположно вращающихся нереверсивных лопастных винтов со скрепленными с ними модуляторами света и вертикальной осью вращения, совмещенной с осью, проходящей через точку подвеса основания, и блока фиксации моментов совмещения модуляторов света с диаметральной плоскостью корпуса, двухканальный блок обработки с переключателем, генератором тактовых импульсов, делителем частоты, сумматором и регистром, и последовательно соединенные дешифратор и индикатор, отличающееся тем, что, с целью повышения точности за счет уменьшения влияния ошибок, обусловленных наклонами и вибрацией, оно снабжено двумя блоками угловой ориентации, двумя дополнительными двухканальными блоками обработки и двумя исполнительными механизмами углового перемещения основания в двух взаимно перпендикулярных плоскостях, каждый из которых подключен к входу регистра соответствующего блока угловой ориентации, при этом блоки угловой ориентации выполнены идентично блоку азимутальной ориентации, оси вращения их лопастных винтов ортогональны между собой и с осью вращения лопастных винтов блока азимутальной ориентации, а регистры каждого двухканального блока обработки подключены к введенному блоку вычисления и введения поправок за наклон, выход которого подключен к дешифратору.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 1563202, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
