Изобретение относится к точному приборостроению и может быть использовано на неподвижном основании, например, для определения начального азимутального угла скважинного прибора (СП) гироскопического инклинометра (ГИ).
Известен инклинометр (патент РФ №2004786, МПК5 E21B 47/02, опубликован от 15.12.93), в котором заложен способ начальной азимутальной выставки, предполагающий, что при неподвижном относительно Земли СП измеряют проекции ускорения силы тяжести и угловой скорости вращения Земли на оси перпендикулярные оси СП и жестко с ним связанные. По измеренным ускорениям определяют зенитный угол установки СП, а также апсидальный угол (угол собственного поворота) СП. По найденным зенитному и апсидальному углам, а также по измеренным угловым скоростям вычисляют азимут корпуса СП. Кроме того, определяют азимут главной оси гироскопа, лежащей в горизонтальной плоскости, который, впоследствии, используется при работе гироинклинометра в скважине. Кроме того, способ содержит алгоритм компенсации видимого ухода главной оси трехстепенного гироскопа (ТСГ) и систематической составляющей его дрейфа. Этот алгоритм основан на определении вертикальной составляющей угловой скорости вращения Земли, суммировании ее с величиной скорости дрейфа ТСГ, интегрировании полученной суммы. Полученная поправка вводится в вычисленное значение азимута корпуса СП.
Недостатком данного способа является определение начального азимута только на базе одного измерения угловой скорости и ускорения силы тяжести, что не обеспечит требуемой точности определения начального азимута СП, и как следствие, не обеспечит точность дальнейшей работы (ГИ). И главное, этот способ не обеспечивает начальную выставку СП, в которых не предусмотрена автономная азимутальная начальная выставка СП.
Известен также способ определения угловой ориентации СП, в том числе определения начальной азимутальной ориентации СП (патент РФ №2030574, МПК6 E21B 47/02, опубликовано 10.03.1995 г.), включающий измерение ускорения силы тяжести и измерение угловой скорости по трем взаимно-перпендикулярным осям, причем оси чувствительности измерителей угловых скоростей последовательно устанавливают в положения 0° и 180°. Затем определяют угловую скорость Земли как полуразность измеренных угловых скоростей при положениях осей чувствительности 0° и 180°. Азимут скважины вычисляют с учетом измеренных величин по приведенной математической зависимости
где gX, gY, gZ - проекции ускорения силы тяжести на оси чувствительности измерителя ускорения; 
В данном способе, хотя отсутствует необходимость применения трехстепенного гироскопа и измерение угловой скорости вращения Земли проводят в двух ориентациях, получаемых разворотом оси чувствительности измерителя угловой скорости на 180°, тем не менее, этого недостаточно для гарантированного повышения точности формирования начального азимута и возможности его использования для начальной азимутальной выставки СП, в которых не предусмотрена автономная азимутальная начальная выставка СП.
Известен способ определения начального азимутального угла (патент РФ №2104490, МПК6 G01C 19/00, E21B 47/02, опубликовано 10.02.1998 г.), включающий измерение проекции угловой скорости вращения Земли на оси чувствительности измерителя угловой скорости в режиме интегрирования сигналов свободного трехстепенного гироскопа, измерение ускорения относительно оси чувствительности измерителя ускорения, при этом оси чувствительности измерителя угловой скорости взаимно перпендикулярны и перпендикулярны продольной оси СП, а ось чувствительности измерителя ускорения совпадает с одной из осей измерителя угловой скорости. Измерения производят в нескольких ориентациях, а при переходе к каждой новой ориентации гироскоп электрически арретируют, а при измерениях превращают в свободный, размыкая цепи электрического арретирования. По результатам измерения выделяют дрейф гироскопа и находят положение апсидальной плоскости, устанавливают одну из осей чувствительности измерителя угловой скорости в эту плоскость, измеряют проекцию угловой скорости вращения Земли и ускорения силы тяжести. По полученным данным производят вычисление азимута и зенитного угла СП.
Недостатком данного способа для возможности начальной выставки СП, в которых нет инструментальных устройств для автономной выставки, является необоснованно продолжительное время измерения, связанное с переводом гироскопа в режим интегрирования, громоздкость процедур, и, в конечном счете, недостаточная точность.
Известен способ определения угловой ориентации (патент РФ №2387828, МПК6 E21B 47/02, G01C 19/00, опубликовано 27.04.2010 г.) с помощью гироскопического инклинометра, включающий измерение в нескольких ориентациях проекций угловой скорости вращения Земли и проекций ускорения силы тяжести на оси, связанные с корпусом инклинометра, и вычисление углов ориентации прибора с учетом выделенного дрейфа гироскопа, при этом в качестве измерителя угловой скорости используют гироскопический чувствительный элемент, при измерениях совершают поворот платформы на 360°, измерения проводят в ориентациях 
Недостаток данного способа заключается в том, что в силу измерения одной проекции угловой скорости и применении для поиска наилучшей оценки функционала, представляющего сумму разностей между измеренным и эталонным сигналами, он имеет потенциально заниженную точность формирования азимута. А так же, как и все предыдущие аналоги, требует дополнительные операции для возможности использования этих методов для внешней азимутальной выставки скважинных приборов.
Известен также способ начальной азимутальной выставки (способ определения азимута и зенитного угла скважины и гироскопический инклинометр - патент РФ №2100594, МКИ E21B 47/02. Бюл. №36 от 27.12.1997 г.), взятый за прототип, включающий вращение оси чувствительности измерителя угловой скорости вокруг вертикальной оси с постоянной скоростью на заданный угол, измерение в последовательных положениях угла поворота этой оси относительно корпуса и горизонтальной составляющей угловой скорости вращения Земли совместно с угловой скоростью дрейфа гироскопа относительно оси, являющейся осью чувствительности измерителя угловой скорости, по результатам измерений вычисляют среднюю угловую скорость вращения платформы, систематическую составляющую дрейфа гироскопа и формируют эталонную модель измеряемой угловой скорости

где ΔT - интервал времени между измерениями; j - номер измерения; φ - фазовый сдвиг. Для оценки фазового сдвига вычисляют функцию невязки, представляющую сумму квадратов разности эталонной ωЭj и измеренной ωj угловых скоростей на всем наборе измерений, которую минимизируют по фазовому сдвигу, а азимутальный угол осей чувствительности измерителей ускорений в момент окончания выставки определяют по формуле
αxв=ψв-ψ1+αx1,
где ψ1, ψв - угол поворота осей чувствительности измерителей ускорений относительно корпуса скважинного прибора вокруг оси стабилизации в моменты начала и окончания выставки; αx1 - азимутальный угол осей чувствительности измерителей ускорений в момент начала выставки, который равен фазовому сдвигу φx, минимизирующему функцию невязки.
Недостаток способа прототипа состоит в том, что в силу измерения проекции горизонтальной составляющей угловой скорости вращения Земли на одну ось чувствительности в серии ее последовательных угловых ориентации, способ имеет потенциально заниженную точность формирования азимута. Причем, как и все предыдущие аналоги, требует дополнительные операции для возможности использования результатов измерений при внешней азимутальной выставки скважинных приборов. Кроме того, для формирования эталонной модели необходимо обеспечить прецизионное значение угловой скорости вращения оси чувствительности.
Известен гироскопический инклинометр (РФ №2100594, МКИ E21B 47/02. Бюл. №36 от 27.12.1997.), состоящий из скважинного прибора, который содержит одноосный гиростабилизатор, на платформе которого жестко установлены измеритель ускорений, двумя осями чувствительности ориентированными перпендикулярно оси стабилизации гиростабилизатора и трехстепенной гироскоп, второй датчик угла которого через усилитель стабилизации соединен с двигателем отработки, кинематически связанным с осью стабилизации (осью подвеса платформы), на которой закреплен выходной датчик угла, выполненный, например, в виде синусно-косинусного трансформатора, и блок цифровой обработки, к соответствующим входам которого подключены выходы выходного датчика угла гиростабилизатора, выходы измерителя ускорений и выход измерителя угловой скорости, причем, первый выход блока цифровой обработки соединен с управляющим входом задатчика эталонного тока, сигнальный выход которого подключен к первому датчику момента гироскопа, расположенному на оси перпендикулярной оси стабилизации, а каротажный кабель двумя своими входами соединен со вторым и третьим выходами блока цифровой обработки, который содержит однокристальную микроЭВМ, приемо-передатчик, три двухканальных преобразователя напряжение-частота и три двухканальных реверсивных счетчика, причем, порты Р0 и Р2 однокристальной микроЭВМ, запрограммированные на ввод, соединены своими входами с соответствующими выходами младшего и старшего байтов шины данных реверсивных счетчиков, порт Р1, запрограммированный на вывод, разрядами с Р1.0 по Р1.5 подключен соответственно к входам разрешения выборки и разрешения чтения соответствующих реверсивных счетчиков, разряд Р1.6 подключен к входам опроса всех реверсивных счетчиков, а разряд Р1.7 соединен с входами синхронизации всех преобразователей напряжение-частота и реверсивных счетчиков, разряд порта Р3.0, запрограммированный на выдачу команды управления, соединен с первым выходом блока цифровой обработки, входы преобразователей напряжение-частота являются соответственно входами блока цифровой обработки, а вход/выход последовательного ввода/вывода однокристальной микроЭВМ через приемо-передатчик соединен с каротажным кабелем и является входом/выходом скважинного прибора.
Недостаток прототипа состоит в том, что он содержит измеритель угловой скорости с одной осью чувствительности и это потенциально заниженную точность определения начального азимута. С другой он не содержит конструктивных узлов позволяющих производить внешнюю азимутальную выставку других устройств и, в частности, скважинных приборов малого диаметра, в которых нет автономной азимутальной выставки.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении точности определения начального азимута и в расширении функциональных возможностей, а именно - в аппаратно-программной передаче начального азимута в скважинный прибор, который не имеет автономной начальной азимутальной выставки.
Технический результат достигается тем, что способе в начальной азимутальной выставки скважинного прибора гироскопического инклинометра, включающем измерение ускорения силы тяжести относительно двух взаимно перпендикулярных осей и на основании этих измерений горизонтирование оси чувствительности измерителя угловой скорости и ее вращение с постоянной угловой скоростью на заданный угол, измерение в последовательных положениях угла поворота этой оси относительно корпуса прибора и измерение горизонтальной составляющей угловой скорости вращения Земли в проекции на ось чувствительности измерителя угловой скорости, вычисление функции невязки, представляющей сумму квадратов разности эталонной и измеренной угловых скоростей на наборе измерений, и ее минимизацию, новым является то, что
горизонтальную составляющую угловой скорости Земли измеряют относительно двух взаимно перпендикулярных осей чувствительности, а функцию невязки формируют на двух наборах измерений горизонтальной составляющей угловой скорости вращения Земли, которую минимизируют по азимуту корпуса азимутального модуля, величина которого определяется выражением
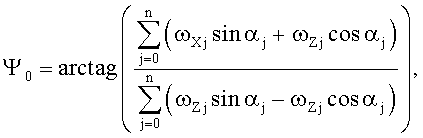
где αj - угол поворота осей чувствительности измерителей угловой скорости относительно корпуса; 

В азимутальном модуле, содержащем поворотную платформу, на которой жестко установлены два измерителя ускорений, оси которых взаимно перпендикулярны между собой и перпендикулярны оси подвеса платформы, трехстепенной гироскоп, один канал которого представляет измеритель угловой скорости с осью чувствительности перпендикулярной оси подвеса платформы, двигатель отработки, кинематически связанный с осью подвеса платформы, на которой закреплен выходной датчик угла, выполненный, например, в виде синусно-косинусного трансформатора, и блок цифровой обработки, содержащий однокристальную микро-ЭВМ, приемопередатчик, три двухканальных преобразователя напряжение-частота, соединенных с тремя двухканальными реверсивными счетчиками, к соответствующим входам блока цифровой обработки подключены выходы выходного датчика угла, выходы двух измерителей ускорений и выход измерителя угловой скорости, первый выход блока цифровой обработки соединен с управляющим входом задатчика эталонного тока, а второй и третий выходы блока цифровой обработки являются выходами приемо-передатчика,
новым является то, что трехстепенной гироскоп является двухкомпонентным измерителем угловой скорости, оси чувствительности которого взаимно перпендикулярны и перпендикулярны оси подвеса платформы, ось которой параллельна оси симметрии вертикального отверстия корпуса, на котором установлен узел для крепления скважинного прибора, ось отверстия которого должна совпадать с продольной осью скважинного прибора при установке его в азимутальный модуль,
в корпусе которого выполнены два соосных отверстия, ось симметрии которых перпендикулярна и пересекает ось симметрии вертикального отверстия и совпадает с плоскостью отсчета азимутального угла корпуса азимутального модуля, при этом в одно соосное отверстие установлен узел азимутальной привязки корпуса скважинного прибора к корпусу азимутального модуля, а во второе входит выдвижная направляющая этого узла, осуществляя азимутальное совмещение корпусов скважинного прибора и азимутального модуля при его установке в азимутальный модуль,
при этом к входу двигателя отработки подключен сигнальный выход задатчика эталонного тока, к пятому и шестому входам блока цифровой обработки подключены выходы двухкомпонентного измерителя угловой скорости, второй и третий выходы соединены с пультом управления, который соединен с наземным вычислителем, реализующим алгоритмы работы азимутального модуля и гироскопического инклинометра.
Узел крепления скважинного прибора является сменным для выставки скважинных приборов различных диаметров.
Сущность изобретения поясняется чертежами, приведенными на фиг.1, фиг.2, фиг.3, фиг.4, где
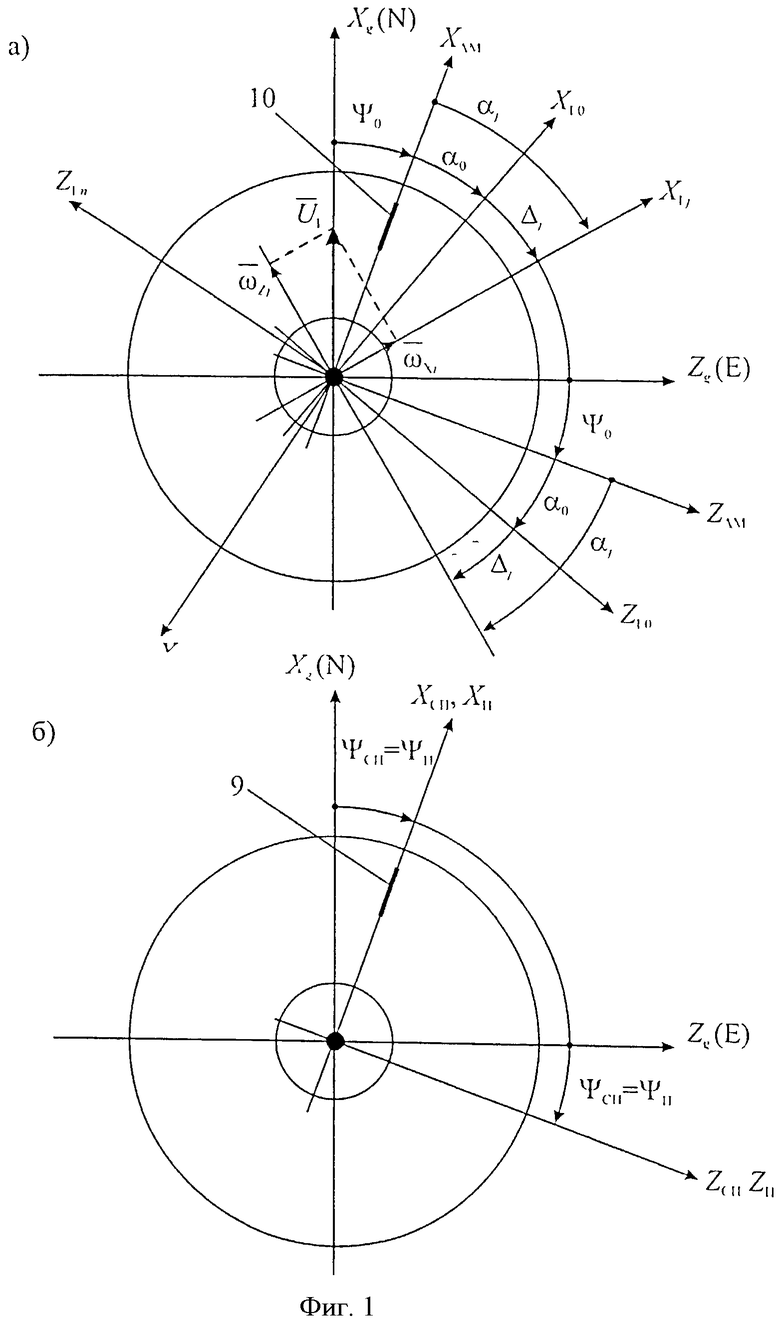
фиг.1 иллюстрирует взаимное положение систем координат (СК) при вращении осей чувствительности ДИУС в процессе начальной азимутальной выставки;
фиг.2а) - кинематическая схема прибора;
фиг.2б) - узел азимутальной привязки с выдвинутой направляющей;
фиг.3 - иллюстрирует этапы установки СП в AM;
фиг.4 - электрическая схема блока цифровой обработки.
На чертежах приняты следующие обозначения:
1 - установочная плита в устье скважины;
2 - узел регулировки положения AM относительно плоскости горизонта;
3 - узел азимутальной привязки;
4 - корпус азимутального модуля;
5 - утяжелитель СП;
6 - узел крепление СП;
7 - скважинный прибор (СП);
8 - каротажный кабель;
9 - верхняя риска азимута на корпусе СП;
10 - риска азимута на корпусе (зажиме) AM;
11 - кабельный барабан;
12 - геофизический коллектор;
13 - 4-х жильный кабель;
14 - наземный вычислитель (Notebook);
15 - кабель, соединяющий Notebook с пультом управления (например, через порт RS-232);
16 - пульт управления;
17 - 2-х жильный кабель;
18 - ротор двигателя отработки;
19 - платформа;
20 - двухкомпонентный измеритель угловой скорости (ДИУС);
21 - ротор выходного (системного) датчика угла (например, синусно-косинусный трансформатор (СКТ));
22 - задатчик эталонного тока;
23 - блок цифровой обработки (БЦО);
24 - блок фазочувствительных выпрямителей (ФЧВ);
25, 26 - измерители ускорений;
27 - риска высоты установки СП,
28 - однокристальная микроЭВМ, например, типа KPI8I6 BE5I, она имеет встроенное программируемое ПЗУ емкостью 4096 байт, встроенное ОЗУ емкостью 128 байт, 4 восьми разрядных двунаправленных порта (Р0, P1, P2, Р3), быстродействующий программируемый последовательный порт, работающий в мультиплексном режиме;
29 - приемо-передатчик, его можно реализовать на оптронах, причем, приемная часть - на оптронах типа 249ЛП1, а выходная часть - на любом диодном оптроне с выходным транзистором;
30, 32, 34 - преобразователи напряжение-частота (ПНЧ), двухканальные реализованы в микросборочном исполнении в корпусе 159 по стандартной схеме (документация №ИСМЯ 431.321.001);
31, 33, 35 - реверсивные счетчики, реализованные на БИС К1806 ХМ1-242, содержат два автономных канала со схемами управления и синхронизации, а также выходные буферные регистры;
36 - болт;
37 - гайка;
38 - регулировочные пластины;
39 - корпус узла азимутальной привязки;
40 - выдвижная направляющая;
41 - ручка;
42 - направляющий цилиндр;
43 - пружина;
44, 45 - соосные направляющие отверстия;
46 - направляющее отверстие утяжелителя СП;
47 - зажим;
48 - болт зажима;
49 - гайка зажима;
50 - нижняя риска азимута на корпусе СП;
51 - риска азимута на утяжелителе СП;
52 - статор двигателя отработки;
53 - статор выходного (системного) датчика угла;
На фиг.1 изображены системы координат (СК) со стороны местной вертикали, причем, на левом рисунке приведены СК для AM, на правом - для СП:
XgYgZg - земная географическая СК, причем, ось Xg ориентирована на север (N), ось Yg ориентирован по местной вертикали, Zg дополняет систему координат до правой (направлена на восток);
XAMYAMZAM - СК, связанная с корпусом AM (риска 10, нанесенная на корпусе, соответствует нулевому положению ротора 21 системного датчика углов относительно статора 53);
XГjYГjZГj, 
XСПYСПZСП - CK, связанная с корпусом СП ((риска 9, нанесенная на корпусе, определяет ориентацию корпуса СП и соответствует нулевому положению ротора 21 системного датчика углов относительно статора 53);
XПYПZП - CK, связанная с платформой СП, например, платформа гиростабилизатора.
Для пояснения существа изобретения на фиг.1 приняты следующие обозначения:
ψ0 - азимут корпуса AM;
ψСП - азимут корпуса СП;
αj, 
ψП - начальный азимут платформы СП;
Δj - приращение угла поворота платформы между измерениями;
UГ - горизонтальная составляющая угловой скорости вращения Земли;
ωXj, ωZj - проекция UГ на оси XГj и ZГj (фактически - показания ДИУС).
На фиг.2 и фиг.4 приняты следующие буквенные обозначения напряжений:
U1, U2 - выходные сигналы синусного и косинусного каналов синусно-косинусного трансформатора (системный датчик углов с ротором 21 и статором 53) после блока ФЧВ;
U3, U4 - выходные сигналы измерителей ускорений 25 и 26;
U5, U6 - выходные сигналы ДИУС 20.
На фиг.2 приняты следующие обозначения осей:
YСП - продольная ось скважинного прибора ГИ;
Yкр - продольная ось узла крепления AM;
YAM - ось подвеса платформы AM;
ZAM - ось направляющих отверстий узла азимутальной привязки;
XA, ZA - оси чувствительности измерителей ускорений.
AM содержит платформу 19, установленную в корпусе 4, например, в шарикоподшипниковых опорах. На платформе 19 установлен ДИУС 20 с взаимоперпендикулярными осями чувствительности, перпендикулярными оси подвеса платформы. По оси подвеса платформы установлены двигатель отработки, состоящий из ротора 18 и статора 52, и выходной датчик угла, состоящий из ротора 21 и статора 53, выполненный, например, в виде синусно-косинусного трансформатора. Выходы ДИУС 20 соединены с пятым и шестым входами блока цифровой обработки 23, с первым и вторым входами которого соединены выходы блока ФЧВ 24, входы которого соединены с выходами статора 53 системного датчика угла. С третьим и четвертым входами БЦО 23 соединены измерители ускорений 25 и 26, установленные на платформе 19, оси чувствительности ХA, ZA которых взаимно перпендикулярны и перпендикулярны оси подвеса платформы YAM. Первый выход БЦО 23 соединен с управляющим входом задатчика эталонного тока 22, сигнальный выход которого соединен с ротором 18 двигателя отработки. Второй и третий выходы БЦО 23 соединены с помощью двухжильного кабеля 17 с пультом управления 16. Второй вход пульта управления соединен с помощью кабеля 15 с наземным вычислителем 14, типа Notebook. Наземный вычислитель 14 используется для выполнения алгоритмов работы AM и ГИ.
Первый вход пульта управления 16 соединен с помощью кабеля 13 с геофизическим коллектором 12 кабельного барабана 11, на который намотан каротажный кабель 8, используемый для спуска/подъема СП 7 ГИ и электрической связи пульта управления и СП.
Блоки питания элементов AM на фиг.2 не показаны и могут быть выполнены аналогично блокам питания (вторичным источникам питания) СП и располагаться, либо в AM, либо в пульте управления.
На корпусе СП нанесено две, лежащие на одной линии, риски: верхняя 9 и нижняя 50. На утяжелителе 5 СП, нанесена риска 51, которая при установке утяжелителя 5 в СП 7, должна совпадать с риской 50 (эту операцию рекомендуется выполнять заранее при подготовке СП к работе).
Верхняя риска 9 СП, при установке СП в AM должна совпадать с риской 10, нанесенной на зажим 47 узла крепления 6 СП в AM. Узел 6 жестко крепится к фланцу корпуса 4 AM (элементы конструкции крепления не показаны) и состоит из зажима 47, болта 48 и гайки 49. Положение СП в AM фиксируют с помощью узла азимутальной привязки 3, состоящего из корпуса 39, установленного в направляющее отверстие 44 корпуса AM, которое соосно второму направляющему отверстию 45. В корпусе 39 узла азимутальной привязки установлен направляющий цилиндр 42, соединенный с ручкой 41. К ручке присоединена пружина 43, с другой стороны прикрепленная к корпусу 39. Также к ручке присоединена выдвижная направляющая 40, проходящая через направляющее отверстие 46 утяжелителя 5 СП 7 и направляющее отверстие 45 корпуса 4 AM.
Положение корпуса 4 AM в горизонте может быть отрегулировано с помощью узла регулировки 2, состоящего из регулировочных пластин 38, с помощью которых осуществляется регулировка, болта 36 и гайки 37, с помощью которых AM крепится к установочной плите 1.
Способ начальной азимутальной выставки СП можно разделить на три этапа: подготовка AM, определение азимута AM, определение азимута СП (в эти этапы не включена подача питания).
Подготовка AM.
Этапы подготовки поясняются на фиг.1.
1. В устье скважины на специально подготовленную установочную поверхность с элементами крепления и регулировок относительно плоскости горизонта устанавливают AM с азимутом корпуса Ψ0≈30°÷60° (не обязательно, но желательно - проще будет алгоритм, т.к. не надо определять квадрант), что не является каким-то ограничением.
2. Измеряют сигналы измерителей ускорений, установленных на поворотной платформе, которая пока не вращается, и с помощью регулировок по п.1 добиваются нулевых сигналов измерителей ускорений. При этом измерительные оси ДИУС ХГ0 и ZГ0 занимают горизонтальное положение (необходимо, чтобы вертикальная составляющая угловой скорости вращения Земли не оказывала влияния).
Определение азимута AM.
1. Измерительные оси ДИУС ХГ0 и ZГ0 приводят во вращение с постоянной скоростью вокруг вертикали.
2. С заданным шагом по времени Δt (или по углу Δj) измеряют углы поворота αj осей чувствительности ДИУС XГj и ZГj относительно корпуса AM и угловые скорости ωXj, 
3. Записывают массивы углов поворота αj и угловых скоростей ωXj, ωZj, в память компьютера.
4. После заданного числа оборотов N (достаточно 2-3 оборотов) прекращают вращение осей чувствительности ХГj и ZГj ДИУС.
5. Вычисляют азимут AM по формуле
и записывают в память компьютера AM.
Пояснение получения формулы вычисления азимута Ψ0.
ДИУС измеряет проекции ωXj и ωZj. При вращении осей чувствительности ХГj и ZГj ДИУС (см. фиг.1) измеряет проекции горизонтальной угловой скорости вращения Земли, которые при произвольном положении этих осей имеют вид

Задачей является определение азимута Ψ0 корпуса AM. Дальнейший алгоритм начальной выставки состоит в получении наилучшей оценки угла Ψ0 методом наименьших квадратов. Для этого запишем функцию невязки в виде

Для определения оптимального значения угла Ψ0 минимизируем функцию невязки (3) по Ψ0. Минимизацию можно проводить как в процессе выставки методом перебора, как это сделано в прототипе, так и аналитически, выполнив преобразования заранее, как в предлагаемом способе.
Для этого вычислим производную от функции невязки (3) по Ψ0 и приравняем ее нулю

Преобразовав уравнение (4), получим

которое после раскрытия синуса и косинуса суммы двух углов и преобразования принимает вид

или

откуда следует формула (1)
Определение азимута СП.
1. Помещают СП в корпус AM и совмещают корпуса СП и AM до согласованного положения.
2. Перезаписывают угол Ψ0 в память компьютера гироинклинометра, если AM имеет свой компьютер, или, если AM и ГИ имеют совместный вычислитель, то считают записанный азимутальный угол AM начальным азимутальным углом СП, и используют его значение, как начальное, в алгоритме работы гироинклинометра при его спуске в скважину (особенность использования Ψ0 зависит от типа ГИ и будет рассмотрен ниже).
В соответствии со способом был разработан азимутальный модуль, работу которого поясним с использованием фиг.2 и фиг.4.
Работу азимутального модуля, как устройства, представим также в виде последовательности этапов.
Подготовка AM.
1. На установочную плиту 1 в устье скважины устанавливают корпус 4 AM таким образом, чтобы риска 10 корпуса AM оказалась в азимутальном секторе Ψ0=30°÷60°, что вполне выполнимо даже без дополнительных измерительных средств.
2. С помощью узла регулировки 2 по сигналам измерителей ускорений 25 и 26 выставляют оси чувствительности ДИУС ХГ0 и ZГ0 в плоскость горизонта. Сигналы измерителей ускорений 25 и 26 наблюдают на дисплее наземного вычислителя 14, в который цифровой сигнал поступает по следующему пути (см. фиг.4): преобразователь напряжение-частота 32 (выходной сигнал - эталонные импульсы с частотой, пропорциональной напряжениям U3 и U4); двоичный счетчик 33, работающий в приращениях для каждого такта вычислителя (выходной сигнал - двухбайтовый цифровой сигнал, поступающий в шину данных ШД); с ШД цифровой код побайтно поступает на входные 8-разрядные порты Р0 и Р2 микроЭВМ 28 (порт Р1 организует запись информации и опрос реверсивных счетчиков, при этом, разряды с Р1.0 по Р 1.5 подключены к шине адреса (ША), причем, каждый разряд соответствует одному адресу и связан с входами разрешения выборки СЕ и разрешения чтения RD соответствующих реверсивных счетчиков 31, 33 и 35); приемо-передатчик 29 передает цифровую информацию в последовательном входе по двухжильному кабелю 17 в микроконтроллер пульта управления 16, откуда по кабелю 15 (см. фиг.2) поступает в наземный вычислитель 14 типа PC-486 Note Book на порт RS 232 при этом используется тот же приемопередатчик, что и в блоке БЦО 23. Отличие состоит только в том, что используются стандартные буферы для согласования с уровнями RS 232; программа, зашитая в память наземного вычислителя 14, при соответствующем обращении через экранное меню, показывает значения ускорений силы тяжести, измеренное измерителями ускорений 25 и 26. Определение азимута AM.
1. После подготовки AM к работе придают платформе 19 вращение с постоянной угловой скоростью (2-4°/с). Для этого подают команду от наземного вычислителя 14 о начале вращения в БЦО 23, который формирует управляющий сигнал Uк, подаваемый через разряд Р3.0 порта Р3 и первый выход БЦО на управляющий вход задатчика эталонного тока 22, с сигнального выхода которого выдается эталонное напряжение (ток) на ротор 18 двигателя отработки.
2. С заданным шагом по времени, например, Δt=1с (шаг опроса задается наземным вычислителем 14) последовательно опрашиваются: двухканальные счетчики 31, на которые поступают импульсы двухканального преобразователя напряжение-частота 30, подключенного к выходам блока ФЧВ 24, входы которого соединены с синусной и косинусной обмотками ротора 21 СКТ, и двухканальные счетчики 35, на которые поступают импульсы двухканального преобразователя напряжение-частота 34, подключенного к ДИУС 20. Аналогично, как и сигналы измерителей ускорений 25 и 26, преобразуется и записывается в виде массивов в память наземного вычислителя 14.
3. После поворота платформы на заданное число оборотов N (или после заданного числа шагов по времени), с наземного вычислителя подается команда на остановку платформы и прекращения считывания информации с двухканальных счетчиков 31 и 35.
4. Наземный вычислитель 14 по формуле (1) рассчитывает азимутальный угол корпуса AM (азимутальный угол риски 10).
Дальнейшая задача состоит в правильном использовании вычисленного азимутального угла Ψ0 AM в работе программы гироскопического инклинометра при спуске СП в скважину. Для этого азимутальное положение корпуса СП необходимо согласовать с азимутальным положением корпуса AM, а дальнейшее использование Ψ0 зависит от типа гироскопического инклинометра (ГИ), в котором предполагается внешняя начальная выставка в азимуте, например, как в гироинерциальном модуле гироскопического инклинометра заявка на изобретение которого отправляется одновременно с данной заявкой.
Согласование взаимного положения корпусов СП и AM.
1. Потянув за ручку 41 узла азимутальной привязки 3, вытягивают выдвижную направляющую 40 на себя до упора.
2. Повернув ручку 41, фиксируют выдвижную направляющую 40 в отведенном положении.
3. СП 7 опускают с помощью каротажного кабеля 8 до положения, когда горизонтальная риска 27, нанесенная на СП, совпадет с верхней кромкой зажима 47 узла крепления 6 AM (этап I на фиг.3).
4. СП 7 разворачивают вокруг продольной оси, пока вертикальная риска 9 СП не совпадет с риской 10 AM (этап II на фиг.3).
5. Положение СП фиксируется с помощью выдвижной направляющей 40. Для этого возвращают ручку 41 в положение, когда выдвижная направляющая 40 имеет возможность свободно перемещаться вправо, и медленно, удерживая натяжение пружины 43, перемещают вправо таким образом, чтобы выдвижная направляющая 40 одновременно вошла в направляющее отверстие 46 утяжелителя 5 СП и в направляющее отверстие 45 AM (технологически возможны различные варианты совмещения). С помощью узла крепление 6 СП в AM закрепляют СП в AM. Таким образом, корпуса AM и СП имеют одинаковую азимутальную ориентацию.
Вычисленный азимут передается в вычислитель ГИ, если у AM и ГИ отдельные вычислители, и в зависимости от типа инклинометра определяется либо азимут корпуса СП, либо азимут платформы гироинерциального блока СП. На фиг.2 AM и СП имеют общий наземный вычислитель 14 и поэтому в процедуре перезаписи информации в другой вычислитель нет необходимости.
а) Если СП ГИ построен на базе бескарданной инерциальной системы (БИНС), то азимут корпуса СП ΨСП принимается равным азимуту AM.
б) Если СП ГИ построен на базе одноосного гиростабилизатора (ОГС), то необходимо определить азимут платформы ОГС. При этом если в ГИ предусмотрен режим арретирования, то платформа до спуска СП в скважину должна быть приведена в нулевое положение относительно корпуса, тогда азимут платформы ОГС будет совпадать с азимутом СП и AM (ΨСП=ΨП).
Перед началом спуска платформу ОГС разарретируют, затем СП освобождают в узле фиксации 3, в узле крепления 6, и только потом начинается спуск СП в скважину. При этом AM остается закрепленным в устье скважины. Технологически можно после освобождения СП сначала снять AM, а потом начать спуск СП.
В соответствии с изобретением поработано два варианта эскиза конструкции. Для построения AM планируется использовать следующие основные функциональные узлы:
1. ДИУС на базе серийного динамически настраиваемого гироскопа ГВК-16, который имеет порог чувствительности 0,01 °/час и максимальную скорость измерения 45 °/час, что вполне достаточно для определения азимута с точностью 0,5°-0,8° на широтах до 75°.
2. Измерители ускорений - интегральные кристаллические акселерометры AT-1104 с порогом чувствительности 10-4 g и диапазоном ±1 g (как в патенте прототипа RU №2100594 C1, 27.12.1997).
3. Двигатель отработки - малоскоростной моментный двигатель с возбуждением от постоянных магнитов типа ДС-27 (безредукторный вариант) или двигатель постоянного тока ДПР-32 с редуктором.
4. Системный датчик угла - синусно-косинусный трансформатор типа СКТ-232 Б
5. Блок цифровой обработки, пульт управления, задатчик эталонного тока, наземный вычислитель аналогично блокам прототипа: патент RU №2100594 от 27.12.1997.
6. Предполагается, что программа работы всего гироинклинометра полностью заимствована из непрерывного инклинометра ИГН-73/100, за исключением фрагмента связанного с начальной выставкой в азимуте. При этом приращении матрицы ориентации на первом шаге работы вычислителя в соответствии с патентом RU №2100594 от 27.12.1997 будет определяться выражением

где αxв - начальный угол платформы (осей чувствительности измерителей ускорений) определяется автономно в гироинерциальном блоке прототипа; ψ0 - начальный угол платформы (осей чувствительности измерителей ускорений) определяется внешним устройством - предлагаемым способом, реализуемым в азимутальном модуле.
Таким образом, предложенный способ на базе измерения горизонтальной составляющей угловой скорости вращения Земли относительно двух взаимно перпендикулярных горизонтальных осей и последующей обработке этих измерений позволяет с повышенной точностью определять азимут корпуса, а реализация этого способа в азимутальном модуле, позволяет перенести этот азимут в другие устройства, которые не имеют автономной начальной выставки, например, скважинные приборы малого диаметра (42-45 мм), сохраняя все положительные качества предложенного способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2250371C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| СПОСОБ КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS (ВАРИАНТЫ) И ПОВЕРОЧНАЯ ИНКЛИНОМЕТРИЧЕСКАЯ УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS | 2010 |
|
RU2433262C1 |
Изобретение относится к точному приборостроению и может быть использовано для определения начального азимутального угла скважинного прибора. Техническим результатом является повышение точности определения начального азимута скважинного прибора. Способ определения начального азимута включает измерение ускорения силы тяжести относительно двух взаимно перпендикулярных осей и на основании этих измерений осуществляют горизонтирование осей чувствительности двухканального измерителя угловой скорости (ДИУС), затем осуществляют вращение осей чувствительности ДИУС относительно вертикальной оси. При этом измеряют угол поворота этих осей относительно корпуса прибора и проекций горизонтальной составляющей угловой скорости вращения Земли на оси чувствительности ДИУС. Вычисляют функции невязки, представляющей сумму квадратов разности эталонной и измеренной угловых скоростей на двух наборах измерений, и ее минимизацию по азимуту корпуса. При выставке скважинный прибор (СП) помещают в азимутальный модуль (AM), и вращают его вокруг вертикальной оси до совмещения по угловому положению с корпусом AM. Предложенный способ осуществляется с помощью азимутального модуля, содержащего поворотную платформу (19), на которой жестко установлены два измерителя ускорений (25, 26) и ДИУС (20). При этом оси измерителей ускорений взаимно перпендикулярны между собой и перпендикулярны оси подвеса платформы, а оси чувствительности ДИУС совпадают с осями чувствительности измерителей ускорений. Кроме того, устройство содержит ротор (18) двигателя отработки, кинематически связанный с осью подвеса платформы, на которой закреплен ротор (21) выходного датчика угла, выполненный в виде синусно-косинусного трансформатора, и блок цифровой обработки (23). Ось подвеса платформы (19) параллельна оси симметрии вертикального отверстия корпуса, на фланец которого установлен узел (6) для крепления скважинного прибора (7). Узел крепления (6) скважинного прибора является сменным с целью возможности выставки скважинных приборов различных диаметров. Кроме того, в корпусе (4) выполнено два соосных отверстия (44, 45), ось симметрии ZAM которых перпендикулярна и пересекает ось симметрии вертикального отверстия и совпадает с плоскостью отсчета азимутального угла корпуса AM. При этом в одно соосное отверстие (44) установлен узел азимутальной привязки (3) корпуса СП к корпусу AM, а во второе отверстие (45) входит выдвижная направляющая (40) этого узла. 2 н. и 1 з.п. ф-лы, 8 ил.
1. Способ начальной азимутальной выставки скважинного прибора гироскопического инклинометра, включающий измерение ускорения силы тяжести относительно двух взаимно перпендикулярных осей и на основании этих измерений горизонтирование оси чувствительности измерителя угловой скорости и ее вращение с постоянной угловой скоростью на заданный угол, измерение в последовательных положениях угла поворота этой оси относительно корпуса прибора и измерение горизонтальной составляющей угловой скорости вращения Земли в проекции на ось чувствительности измерителя угловой скорости, вычисление функции невязки, представляющей сумму квадратов разности эталонной и измеренной угловых скоростей на наборе измерений, и ее минимизацию, отличающийся тем, что горизонтальную составляющую угловой скорости вращения Земли измеряют относительно двух взаимно перпендикулярных осей чувствительности, а функцию невязки формируют на двух наборах измерений горизонтальной составляющей угловой скорости вращения Земли, которую минимизируют по азимуту корпуса азимутального модуля, величина которого определяется выражением
где αj - угол поворота осей чувствительности измерителей угловой скорости относительно корпуса; ωXj, ωZj - измеренные значения угловых скоростей; j - номер измерения; n - количество измерений; Ψ0 - начальный азимутальный угол корпуса азимутального модуля,
при выставке скважинный прибор помещают в азимутальный модуль и вращают его вокруг вертикальной оси до совмещения по угловому положению с корпусом азимутального модуля, обеспечивая при этом равенство начальных азимутальных углов скважинного прибора и азимутального модуля.
2. Азимутальный модуль, содержащий поворотную платформу, на которой жестко установлены два измерителя ускорений, оси чувствительности которых взаимно перпендикулярны между собой и перпендикулярны оси подвеса платформы, трехстепенной гироскоп, один канал которого представляет измеритель угловой скорости с осью чувствительности, перпендикулярной оси подвеса платформы, двигатель отработки, кинематически связанный с осью подвеса платформы, на которой закреплен выходной датчик угла, выполненный, например, в виде синусно-косинусного трансформатора, и блок цифровой обработки, содержащий однокристальную микроЭВМ, приемопередатчик, три двухканальных преобразователя напряжение-частота, соединенных с тремя двухканальными реверсивными счетчиками, к первому и второму входам которого подключены выходы выходного датчика угла, к третьему и четвертому входам - выходы измерителей ускорений, к пятому входу - выход измерителя угловой скорости, первый выход блока цифровой обработки соединен с управляющим входом задатчика эталонного тока, а второй и третий выходы блока цифровой обработки являются выходами приемопередатчика, отличающийся тем, что трехстепенной гироскоп является двухкомпонентным измерителем угловой скорости, оси чувствительности которого взаимно перпендикулярны и перпендикулярны оси подвеса платформы, которая параллельна оси симметрии вертикального отверстия корпуса, на котором установлен узел для крепления скважинного прибора, ось отверстия которого должна совпадать с продольной осью скважинного прибора при установке его в азимутальный модуль, в корпусе которого выполнены два соосных отверстия, ось симметрии которых перпендикулярна и пересекает ось симметрии вертикального отверстия и совпадает с плоскостью отсчета азимутального угла корпуса азимутального модуля, при этом в одно соосное отверстие установлен узел азимутальной привязки корпуса скважинного прибора к корпусу азимутального модуля, а во второе входит выдвижная направляющая этого узла, осуществляя азимутальное совмещение корпусов скважинного прибора и азимутального модуля при его установке в азимутальный модуль, при этом к входу двигателя отработки подключен сигнальный выход задатчика эталонного тока, к пятому и шестому входам блока цифровой обработки подключены выходы двухкомпонентного измерителя угловой скорости, второй и третий выходы соединены с пультом управления, который соединен с наземным вычислителем, реализующим алгоритмы работы азимутального модуля и гироскопического инклинометра.
3. Азимутальный модуль по п.2, отличающийся тем, что узел крепления скважинного прибора является сменным для выставки скважинных приборов различных диаметров.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Устройство ориентации скважинных приборов в пространстве | 1989 |
|
SU1714104A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| WO 1985005652 A1, 19.12.1985 | |||
| US 6453239 B1, 17.09.2002. | |||

