Изобретение относится к измерительной технике и может быть использовано при определении линейного перемещения движущегося якоря в системе управления и защиты ядерного реактора, при измерении углового положения поворотного стола и других узлов станков с числовым программным управлением, а также в другом оборудовании, где требуется точное определение линейного или углового перемещения деталей.
Преобразователи с комбинаторной шкалой позволяют получить высокую точность и разрешающую способность при одной кодовой дорожке, причем чувствительные элементы в таком преобразователе располагаются вдоль направления перемещения.
Известен преобразователь углового перемещения с комбинаторной шкалой, описанный в [1]
В условиях жестких конструктивных ограничений, например, при применении в станках с числовым программным управлением, он имеет недостаточную точность из-за малого числа чувствительных элементов, которые могут быть размещены вдоль направления перемещения.
Известен преобразователь линейного перемещения [2] с комбинаторной шкалой, предназначенный для определения положения (перемещения) регулирующего органа системы управления и защиты ядерного реактора, принятый за прототип.
Он содержит источник сигналов, устройство обработки, якорь, кинематически связанный с контролируемым объектом, задающие и чувствительные элементы.
Задающие элементы имеют число градаций переменного параметра, равное 2, и жестко связаны с регулирующим органом. Конструктивно они ограничены объемом тела продолговатой формы, ось которого совпадает с направлением перемещения регулирующего органа.
Чувствительные элементы установлены вдоль направления перемещения и сдвинуты друг относительно друга на расстояние, кратное длине единицы младшего разряда выходного кода преобразователя. В частном случае они представляют собой катушки индуктивности.
Первые выводы чувствительных элементов соединены линиями связи со входами устройства обработки. Вторые выводы чувствительных элементов объединены и соединены линиями связи с источником сигналов.
При использовании преобразователя-прототипа в системе управления и защиты ядерного реактора его надежность оказывается недостаточной из-за требуемого большого количества чувствительных элементов n и линий связи р.
В нем n N+1, p N+2, где N требуемое число индицируемых состояний, исключая состояние "все 0".
При неидеальных (в смысле их надежности) катушках индуктивности само по себе увеличение количества катушек приводит к снижению надежности преобразователя. При этом из-за жестких конструктивных ограничений линии связи приходится выполнять тонкими.
В условиях высокой температуры и радиации тонкие линии связи окисляются, могут перегорать, ломаться, закорачиваться друг с другом. Заметное значение сопротивления тонких линий связи и его изменение в связи с окислением также снижает надежность.
Таким образом, надежность преобразователя является недостаточной.
Сущность изобретения заключается в том, что в преобразователе перемещения с комбинаторной шкалой, содержащем источник сигналов, устpойство обpаботки, якоpь, кинематически связанный с контролируемым объектом, задающие элементы с числом градаций переменного параметра, равным основанию системы счисления преобразователя, чувствительные элементы, установленные вдоль направления перемещения и сдвинутые друг относительно друга на расстояние, кратное длине Δ l единицы младшего разряда выходного кода преобразователя, в котором первые выводы чувствительных элементов соединены со входами устройства обработки, а второй вывод одного чувствительного элемента соединен с источником сигналов, чувствительные элементы объединены в группе по U в каждой, причем в каждой группе чувствительные элементы размещены на одинаковых расстояниях, а группы чувствительных элементов размещены друг относительно друга со сдвигом, кратным собственной протяженности, при этом задающие элементы объединены в группы длиной tU Δ l для четного t и 2tU Δ l для нечетного t, где t отношение расстояния между соседними чувствительными элементами в группе к длине единицы младшего разряда выходного кода преобразователя, причем группы задающих элементов размещены друг относительно друга со сдвигом, кратным собственной протяженности, остальные вторые выводы чувствительных элементов соединены или с остальными входами устройства обработки или со вторыми выводами других чувствительных элементов.
Это дает возможность уменьшить количество катушек индуктивности и, соответственно, линий связи и тем самым повысить надежность преобразователя.
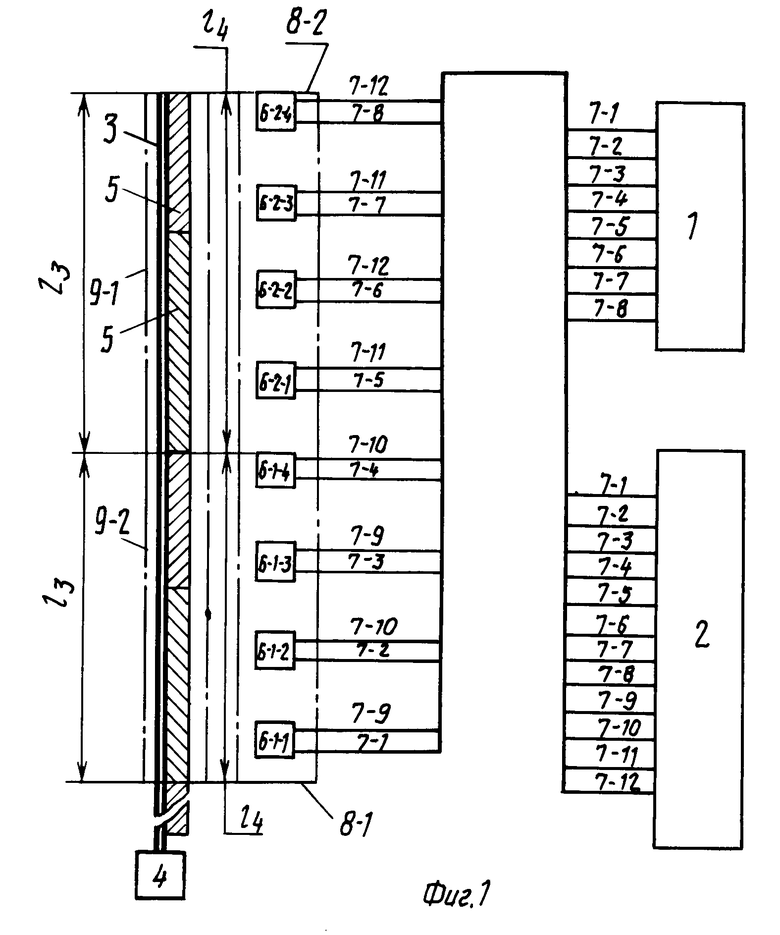
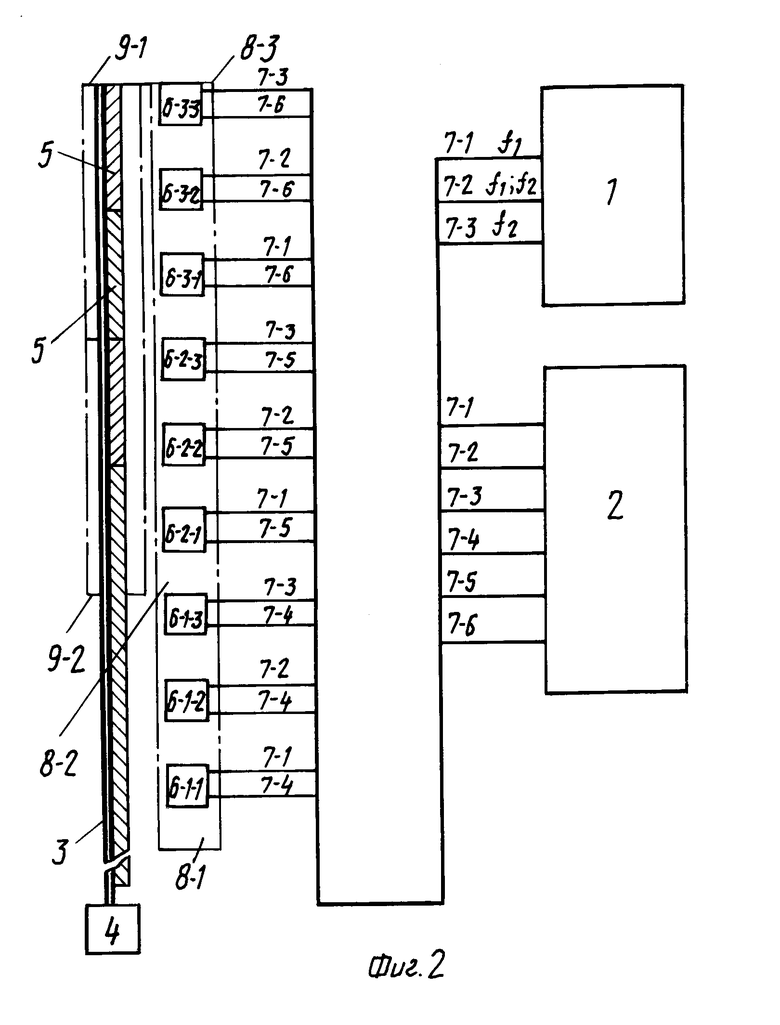
На фиг.1 дан простейший вариант функциональной схемы преобразователя линейного перемещения в код с комбинаторной шкалой; на фиг.2 дан другой упрощенный вариант функциональной схемы преобразователя линейного перемещения в код с комбинаторной шкалой (при уменьшенном числе линий связи).
Преобразователи перемещения с комбинаторной шкалой включает в себя источник 1 сигналов, устройство 2 обработки, якорь 3, кинематически связанный с контролируемым объектом 4, задающие элементы 5, чувствительные элементы 6.
(На фиг.1 чувствительные элементы 6 представляют собой катушки индуктивности).
Задающие элементы 5 выполнены с числом градаций переменного параметра, равным основанию системы счисления преобразователя.
(В примере, иллюстрированном фиг.1, этот параметр магнитная проницаемость μ число градаций магнитной проницаемости равно 2). Чувствительные элементы 6 установлены вдоль направления перемещения и сдвинуты друг относительно друга на расстояние, кратное длине Δ l единицы младшего разряда выходного кода преобразователя.
Описание примера практически не изменится, если в качестве чувствительных элементов 6 применить герконы. Аналогично в качестве чувствительных элементов могут быть использованы электрические контакты, а в качестве задающих проводящие и непроводящие участки якоря, или в качестве чувствительных элементов фоторезисторы, а в качестве задающих прозрачные и непрозрачные участки якоря, через которые освещаются фоторезисторы.
Первые выводы чувствительных элементов 6 соединены со входами устройства 2 обработки линиями связи 7-9 7-12. Вторые выводы чувствительных элементов 6 соединены линиями связи 7-1 7-8 с источником 1 сигналов (на линии связи 7-1, 7-3, 7-5, 7-7 подано напряжение одной фазы источника, а на линии связи 7-2, 7-4, 7-6, 7-8 напряжение противоположной фазы) и с остальными входами устройства 2 обработки.
Чувствительные элементы 6 объединены в группы 8 по U в каждой, в каждой группе 8 чувствительные элементы 6 размещены на одинаковых расстояниях друг от друга. Эти расстояния кратны длине Δ l единицы младшего разряда выходного кода преобразователя. В случае пошагового перемещения якоря 3 длина единицы младшего разряда может быть равна шагу дискретности перемещения якоря.
На фиг.1 U=4, количество групп чувствительных элементов 6 равно 2. Группа 8-1 включает в себя чувствительные элементы 6-1-1, 6-1-2, 6-1-3, 6-1-4, а 8-2 6-2-1, 6-2-2, 6-2-3, 6-2-4. Группы 8 чувствительных элементов 6 размещены друг относительно друга со сдвигом, кратным собственной протяженности lч. На фиг.1 это расстояние равно lч.
При этом задающие элементы 5 объединены в группы 9 задающих элементов. Они имеют длину tU Δ l для четного t и 2tU Δ l для нечетного t, где t отношение расстояния между соседними чувствительными элементами 6 в группе 8 к длине единицы младшего разряда выходного кода преобразователя. (На фиг.1 групп 2: 9-1 и 9-2).
Группы задающих элементов размещены друг относительно друга со сдвигом, кратным собственной протяженности. (На фиг.1 этот сдвиг равен l3).
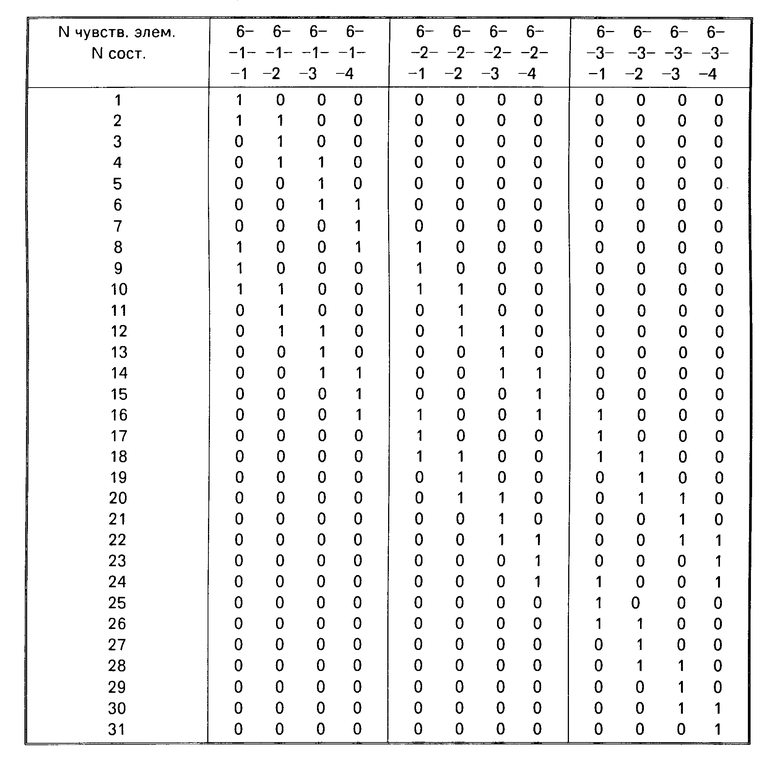
При конструкции преобразователя, показанной на фиг.1, он позволяет при перемещении якоря 3 реализовать первые 15 кодовых комбинаций, приведенных в таблице. Вся таблица рассчитана на 3 группы чувствительных элементов 8, аналогичных 8-1 и 8-2 (фиг.1) при двух группах 9 задающих элементов 5. В ней наличие задающего элемента 5 с μ > 1 напротив чувствительного элемента 6 обозначено "1", а его отсутствие или наличие задающего элемента 5 с μ1 "0".
Градация параметра задающих элементов 5, находящихся напротив чувствительных элементов 6, в смежных (сдвинутых на Δ l) положениях якоря 3 отличаются не более чем у одного чувствительного элемента 6 в каждой группе 8.
Код, формируемый при использовании изобретения и подобный приведенному в таблице, назван авторами синхронным.
Устройство 2 обработки включает в себя детекторы (в частном случае фазовые, что позволяет повысить чувствительность), формирователи, а далее триггеры, дешифраторы, устройство индикации. За детекторами могут следовать АЦП, после которых может осуществляться программная обработка сигналов. Устройство обработки позволяет перевести состояние чувствительных элементов в комбинаторном коде к требуемому коду, например, десятичному, который индицируется устройством индикации.
Преобразователь перемещения в код с комбинаторной шкалой позволяет существенно уменьшить количество чувствительных элементов.
В нем
n UC, где С=log2 ( n UC, где С log + 1
+ 1 + 1) целое число, где n U{ [C] + 1} если С неправильная дробь;
+ 1) целое число, где n U{ [C] + 1} если С неправильная дробь;
U число чувствительных элементов 6 в группе 8;
q 2tU, если t 2K + 1; K -,1,2
q tU, если t 2K; K 1,2
t сдвиг между чувствительными элементами 6, нормированный к шагу дискретности.
Так, при N 31, t 2 и U 4 в данном преобразователе n 12, p 18. Для преобразователя [2] n 32, а p 33.
Таким образом, изобретение позволяет уменьшить количество чувствительных элементов и линий связи.
Могут быть объединены и линии связи. Например, при такой модификации в преобразователе, представленном на фиг. 1, линии связи 7-1, 7-2, 7-5, 7-6 могут быть связаны в одну линию 7-1, а линии связи 7-3, 7-4, 7-7, 7-8 в линию 7-3. Соответственно к источнику 1 сигналов будет подводиться только 2 линии связи (7-1 и 7-3), а к устройству 2 обработки 6 линий (7-1, 7-3, 7-9, 7-10, 7-11, 7-12).
При N 31 такого рода объединение линий связи позволяет уменьшить их количество до p=8, что приводит к увеличению линий связи примерно в 1,5 раза.
При более высокой точности преобразователя, что соответствует большему N, выигрыш намного заметнее.
При N 89 (t 2), n 16, p 10, в то время, как для преобразователя [2] n 90, p 91. Соответственно толщина линий связи может быть увеличена в три раза.
Таким образом, при переходе к преобразователю с синхронным кодом требуется меньше чувствительных элементов, меньше линий связи. Поэтому более толстой может быть жила, больше толщина изоляции. Соответственно, меньше вероятность, что линии связи могут сломаться, перегореть или замкнуться, больше время окисления жилы до ее полного механического разрушения в условиях высоких температур, выше надежность преобразователя.
В примере на фиг. 1 группы 8 чувствительных элементов размещены друг относительно друга со сдвигом, равным длине одной группы. Однако этот сдвиг может быть равен целому числу, умноженному на lч.
При увеличении расстояния между группами 8 чувствительных элементов суммарная длина групп 9 задающих элементов может быть сокращена, что важно, например, (из технологических соображений) для устройства измерения перемещения регулирующего органа ядерного реактора.
Число чувствительных элементов И, соответственно, общее число линий связи можно дополнительно уменьшить за счет увеличения числа линий связи, подводимых к источнику сигналов. На фиг.2 дан пример выполнения данного преобразователя с тремя чувствительными элементами в каждой группе при увеличении (сравнительно с описанной выше модификацией) числа линий связи с источником 1 сигналов до 3.
Чтобы идентифицировать состояния чувствительных элементов 6, здесь источник 1 сигналов выполнен двухчастотным.
Предлагаемый преобразователь перемещения в код позволяет измерять не только линейные, но и угловые перемещения. В этом случае задающие элементы расположены по окружности якоря, а чувствительные элементы тоже по окружности, внутри или снаружи.
Таким образом, изобретение позволяет уменьшить количество катушек индуктивности и, соответственно, линий связи, последние могут быть выполнены более толстыми. Их сопротивление при этом уменьшается, влияние изменения сопротивления снижается, линии связи становятся более прочными. Тем самым повышается надежность преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1992 |
|
RU2050690C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ В КОД | 1987 |
|
SU1786983A1 |
| СЕЙСМОМАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210116C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1995 |
|
RU2108664C1 |
| Способ воспроизведения фазы между двумя электрическими сигналами на фиксированных частотах и устройство для его осуществления | 1991 |
|
SU1817038A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| Преобразователь перемещений в код | 1978 |
|
SU763939A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1992 |
|
RU2038694C1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2012131C1 |
| УСТРОЙСТВО ДЛЯ СРАВНЕНИЯ КОДОВ | 1991 |
|
RU2006913C1 |
Изобретение относится к измерительной технике и может быть использовано при определении линейного перемещения движущегося якоря в системе управления и защиты ядерного реактора, при измерении углового положения поворотного стола и других узлов станков с числовым программным управлением, а также в другом оборудовании, где требуется точное определение линейного или углового перемещения деталей. Техническим результатом изобретения является снижение числа чувствительных элементов и соединительных проводов. Для этого в преобразователе перемещения с комбинаторной шкалой, содержащем источник сигналов, устройство обработки, якорь, задающие элементы, чувствительные элементы, установленные вдоль направления перемещения и сдвинутые друг относительно друга на расстояние, кратное длине Δl единицы младшего разряда выходного кода преобразователя, чувствительные элементы объединены в группы по U в каждой, причем в каждой группе чувствительные элементы размещены на одинаковых расстояниях, а группы чувствительных элементов размещены друг относительно друга со сдвигом, кратным собственной протяженности, задающие элементы объединены в группы длиной tUΔl для четного t и 2tUΔl для нечетного t, где t отношение расстояния между соседними чувствительными элементами к длине единицы младшего разряда выходного кода преобразователя, группы задающих элементов размещены друг относительно друга со сдвигом, кратным собственной протяженности. 2 ил. 1 табл.
ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ С КОМБИНАТОРНОЙ ШКАЛОЙ, содержащий источник сигналов, устройство обработки, якорь, кинематически связанный с контролируемым объектом, задающие элементы с числом градаций переменного параметра, равным основанию системы счисления преобразователя, чувствительные элементы, установленные вдоль направления перемещения и сдвинутые относительно друг друга на расстояние, кратное длине Δl единицы младшего разряда выходного кода преобразователя, первые выводы чувствительных элементов соединены с входами устройства обработки, второй вывод одного чувствительного элемента соединен с источником сигналов, отличающийся тем, что в нем чувствительные элементы объединены в группы по U в каждой, причем в каждой группе чувствительные элементы размещены на одинаковых расстояниях, а группы чувствительных элементов размещены одна относительно другой со сдвигом, кратным собственной протяженности, при этом задающие элементы объединены в группы длиной tUΔl для четного t и 2tUΔl для нечетного t, где t - отношение расстояния между соседними чувствительными элементами в группе к длине единицы младшего разряда выходного кода преобразователя, причем группы задающих элементов размещены одна относительно другой со сдвигом, кратным собственной протяженности, остальные вторые выводы чувствительных элементов соединены или с остальными входами устройства обработки, или с вторыми выводами других чувствительных элементов.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ИЗОЛЯЦИИ ГАЗОПРОЯВЛЕНИЙ В НЕФТЯНЫХ СКВАЖИНАХ ГАЗОНЕФТЯНЫХ МЕСТОРОЖДЕНИЙ | 2001 |
|
RU2212532C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |

