Изобретение относится к области автоматики и вычислительной техники и может быть использовано для связи источников аналоговой информации с цифровым вычислительным устройствам.
Известен способ измерения угла поворота вала, в котором преобразуют угол поворота в периодически изменяющиеся последовательности угловых значений, имеющие спектры пространственных гармоник погрешности, отличные друг от друга, определяют амплитуду и фазу пространственных гармоник погрешности преобразования и запоминают их, для каждого текущего значения угла формируют поправку, формируют выходной код угла в виде полусуммы последовательностей угловых значений и поправки [1].
Недостатком известного способа является малый диапазон однозначного измерения угла, ограниченный одним максимальным периодом последовательностей угловых значений.
Наиболее близким по совокупности признаков техническим решением к данному изобретению является способ измерения угла поворота вала, в котором преобразуют угол поворота вала в периодически изменяющиеся по пилообразному закону последовательности угловых значений, определяют в исходном положении для каждой последовательности начальные смещения от выбранных юстировочных значений и запоминают их, формируют текущие угловые значения для каждой последовательности суммированием измеренных значений с значениями начальных смещений. Кроме того, в известном способе угол поворота преобразуют в дополнительную линейно изменяющуюся в диапазоне измерения последовательность, при этом все последовательности содержат частично перекрывающиеся участки, формируют единое текущее значение угла, начиная с двух старших последовательностей, путем сравнения младшей части единого значения предыдущих старших последовательностей с равнозначной старшей частью соседней с ним младшей последовательности и коррекции по результатам сравнения старшей части единого значения предыдущих старших последовательностей, формируют единое текущее значение из скорректированной части и полного значения соседней младшей последовательности [2].
Недостатком такого способа является его сложность, вызванная необходимостью преобразования угла в дополнительную последовательность и согласования ее значений со значениями других последовательностей.
Целью изобретения является упрощение известного способа.
Поставленная цель достигается тем, что в способе измерения угла поворота вала, основанном на преобразовании угла поворота в периодически изменяющиеся по пилообразному закону последовательности угловых значений, определении в исходном положении для каждой последовательности начальных смещений от выбранных юстировочных значений и их запоминании, формировании текущих угловых значений для каждой последовательности суммированием измеренных значений со значениями начальных смещений, выбирают число периодов изменения первой и второй последовательностей в диапазоне измерения не кратным друг другу и не имеющим общих множителей, больших единицы, формируют опорные значения смещения для каждого из периодов последовательности с меньшим периодом, определяют в каждом измерении текущее значение смещения одной последовательности относительно другой, которое сравнивают с опорными значениями смещения, определяют номер периода, соответствующий ближайшему меньшему опорному смещению по отношению к текущему смещению, формируют старшую часть выходного кода в виде полученного номера периода опорного смещения, а младшую часть - в виде кода текущего значения последовательности с меньшим периодом.
На фиг. 1, 2 представлены структурные схемы двух возможных устройств для осуществления способа.
Устройство на фиг. 1 содержит преобразователи 1 и 2 угла поворота одного и того же вала в код с коэффициентами редукции P1 и P2 соответственно (P1 < P2), сумматоры 3. . . 6, блоки 7, 8 памяти, вычислительный блок 9, блок 10 преобразования кодов, выполненный в виде блока постоянной памяти, кодовые шины 11 и 12. Выходы преобразователя 1 подключены к группе вычитающих входов сумматора 3 и к одной группе входов сумматора 5. Кодовая шина 11 подключена к группе суммирующих входов сумматора 3, выходы которого подключены к входам блока 7 памяти. Выходы блока 7 подключены к другой группе входов сумматора 5. Выходы преобразователя 2 подключены к группе вычитающих входов сумматора 4 к одной группе входов сумматора 6. Кодовая шина 12 подключена к группе суммирующих входов сумматора 4, выходы которого к подлючены к входам блока 8 памяти. Выходы блока 8 подключены к другой группе входов сумматора 6. Выходы сумматоров 5 и 6 подключены к входам вычислительного блока 9, выходы которого подключены к адресным входам блока 10 преобразования кодов. Выходы блока 10 и сумматора 6 являются выходами соответственно старших и младших разрядов устройства.
Устройство на фиг. 2 содержит датчики 1 и 2 перемещения, сумматоры 3...6 блоки 7, 8 памяти, вычислительный блок 9, формирователь 10 дополнительного напряжения, коммутатор 11, аналого-цифровые преобразователи (АЦП) 12 и 13, блок 14 преобразования кодов, элементы 15 и 16 сравнения, ключи 17 и 18, шины 19, 20 и 21. Выход датчика 1 подключен к вычитающему входу сумматора 3 и к первому входу сумматора 5. Шина 19 подключена к суммирующему входу сумматора 3, выход которого подключен к входу блока 7 памяти. Выход блока 7 подключен ко второму входу сумматора 5. Выход датчика 2 подключен к вычитающему входу сумматора 4 и к первому входу сумматора 6. Шина 20 подключена к суммирующему входу сумматора 4, выход которого подключен к входу блока 8 памяти. Выход блока 8 подключен ко второму входу сумматора 6. Выходы сумматоров 5 и 6 подключены к входам вычислительного блока 9, один выход которого подключен непосредственно и через формирователь 10 к информационным входам коммутатора 11, а другой (знаковый) выход - к управляющему входу коммутатора 11. Выход коммутатора 11 подключен к входу АЦП 12, выходы которого подключены к входам блока 14. Выход сумматора 6 подключен к входу АЦП 13. Выходы блока 14 и АЦП 13 являются выходами соответственно старших и младших разрядов устройства. Выходы сумматоров 5 и 6 подключены к одним входам элементов 15 и 16 сравнения соответственно, другие входы которых соединены с шиной 21 напряжения Um, а выходы элементов 15 и 16 подключены к управляющим входам ключей 17 и 18 соответственно, информационные входы которых соединены с шиной 21, а выходы ключей 17 и 18 подключены к третьим (вычитающим) входам сумматоров 5 и 6 соответственно.
Устройство на фиг. 1 работает следующим образом. Преобразователи 1 и 2 преобразуют угол поворота одного и того же вала в периодически изменяющиеся по пилообразному закону в функции угла поворота вала последовательности угловых значений. Угловые значения представлены в виде кодов. В качестве преобразователей 1 и 2 могут быть использованы преобразователи типа угол - фаза - код с коэффициентами электрической редукции P1 и P2 соответственно, при этом P1 < P2 и не имеют общих множителей. Выходной код каждого из преобразователей 1 и 2 изменяется в пределах полюсного деления от 0 до Nm .
Объект перемещения устанавливают в исходное положение и определяют исходные значения кодов Nu1, Nu2 преобразователей 1 и 2 соответственно. Выбирают для исходного положения юстировочные значения кодов каждого из преобразователей (например, Nю1= Nm/2P2, Nю2=0), которые по шинам 11 и 12 подают на суммирующие входы сумматоров 3 и 4 соответственно. В сумматорах 3 и 4 определяют начальные смещения от выбранных юстировочных значений для первой и второй последовательности
N01=Nю1 - Nu1, N02=Nю2-Nu2
Начальные смещения N01 и N02, полученные в сумматорах 3 и 4, запоминают в блоках 7 и 8 соответственно. В качестве блоков 7 и 8 используют энергонезависимые блоки памяти, например перемычки с шинами нулевого и единичного потенциалов.
В процессе эксплуатации в сумматорах 5 и 6 формируют текущие угловые значения N1 и N2 суммированием измеренных значений со значениями начальных смещений
N1=Ni1 + N01, N2=Ni2+N02.
В каждом i измерении в блоке 9 определяют текущее значение смещения одной последовательности относительно другой по формуле
Если ΔN получается отрицательным, то определяют его дополнение до Nm.
Опорные значения Nj смещения для каждого из периодов j=0,1,2,...P2-1 формируют по формуле
Nj=Nm[jP1/P2],
где
[jP1/P2]- дробная часть выражения jP1/P2.
В блоке 10 сравнивают значение ΔN смещения с опорными значениями Nj и определяют номер j периода, соответствующий ближайшему меньшему Nj по отношению ΔN . Блок 10 реализован в виде блока постоянной памяти, по адресам Nj которого записаны коды j. На адресные входы блока 10 поступает код ΔN с выходов блока 9. Поскольку дискретность Nj превышает дискретность ΔN, то выбор адреса осуществляют по соответствующим старшим разрядам кода ΔN, т.е. по ближайшему меньшему Nj по отношению к ΔN. Функционально блок 10 является блоком преобразования кодов.
Выходной код j блока 10, соответствующий номеру периода опорного смещения Nj, является старшей частью выходного кода устройства, а выходной код N2 сумматора 6 является младшей частью выходного кода устройства.
В качестве примера можно рассмотреть преобразователь с P1=11, P2=19, Nm= 210. Соответствие между j и Nj, вычисленное по формуле, представлено в таблице.
Пусть в исходном положении коды на выходах преобразователей 1 и 2 соответствуют Nu1= 423, Nu2= 307 (выбраны произвольные числа). Выбирают для исходного положения юстировочные значения кодов по шинам 11 и 12.
Nю1=210/(2•19)=27, Nю2=0
На выходах сумматоров 3 и 4 формируются коды N01 = 27-423=-396, N02=-307, которые запоминают в блоках 7 и 8 соответственно. На этом заканчивается подготовительный этап.
Пусть в процессе эксплуатации на выходах преобразователей 1 и 2 суммируются коды Nj1=596, Nj2=1. Тогда на выходах сумматоров 5 и 6 формируются коды N1= 596-396= 200, N2=1-307=-306=210-306=718. Величина смещения ΔN на выходах блока 9:ΔN=200-718•11/19=-216=210-216=818.
По коду ΔN = 818, поданному на адресные входы блока 10, на его выходах в соответствии с таблицей формируется код j=10. Выходной код преобразователя будет N=Nm•j+N2 = 210•10+718. Коду N соответствует угол поворота вала преобразователя.

Устройство на фиг. 2 работает следующим образом. Датчики 1 и 2, установленные на одном валу, преобразуют перемещение в пилообразные напряжения с одинаковой максимальной амплитудой Um. В качестве датчиков 1 и 2 могут быть использованы линейные потенциометры или фазовращатели, последовательно соединенные с блоками преобразования сдвига фазы в напряжение. Коэффициенты редукции датчиков 1 и 2 равны соответственно P1 и P2. Нулевые значения выходных напряжений датчиков 1 и 2 не совпадают.
Объект перемещения устанавливают в исходное положение и определяют выходные напряжения Uu1 и Uu2 датчиков 1 и 2 соответственно. Выбирают для исходного положения юстировочные значения напряжений (например, Uю1=Um/2P2, Uю2= 0), которые по шинам 19 и 20 подают на суммирующие входы сумматоров 3 и 4 соответственно. В сумматорах 3 и 4 определяют начальные смещения от выбранных юстировочных значений для первой и второй последовательности угловых значений, представленных напряжениями
U01=Uю1-Uu1, U02=Uu2.
Начальные смещения U01 и U02, полученные в сумматорах 3 и 4, запоминают в блоках 7 и 8 соответственно. В качестве блоков памяти могут быть использованы, например, потенциометры, напряжения на которых устанавливаются равными выходным напряжениям сумматоров 3 и 4 и поддерживаются неизменными в процессе эксплуатации. На этом заканчивается подготовительный этап.
В процессе эксплуатации в сумматорах 5 и 6 формируют текущие угловые значения U1 и U2 суммированием измеренных значений со значениями начальных смещений.
U1= Ui1+U01, U2=Ui2+U02.
Если напряжения U1, U2 превышают уровень Um, то срабатывают соответствующие элементы 15, 16 сравнения (компараторы) и через ключи 17 или 18 к вычитающим входам сумматоров 5 или 6 подключается напряжение Um. В результате выходные напряжения U1 и U2 не превышают по модулю напряжение Um.
В блоке 9, выполненном в виде вычитателя на операционном усилителе, формируют текущее значение смещения одной последовательности относительно другой
Коэффициенты передачи вычитателя в соответствии с P1 и P2 устанавливаются резисторами входных цепей и цепи обратной связи. В формирователе 10, выполненном в виде вычитателя, формируется дополнительное до Um напряжение Ug= Um - ΔU .
При положительном напряжении ΔU на выходе блока 9 коммутатор 11 подключает к входу АЦП12 модуль выходного напряжения блока 9, а при отрицательном напряжении ΔU - выходное напряжение блока 10. АЦП 12 является АЦП параллельного преобразования и выполнен аналогично АЦП типа К1107 ПВ. На вход делителя опорного напряжения АЦП12 подают напряжение Um.
На выходах делителя формируют опорные значения Uj, смещения, соответствующие значениям Nj в таблице. На компараторах АЦП12 сравнивают текущее значение смещения ΔU с опорными значениями Uj. С увеличением ΔU компараторы срабатывают последовательно в порядке увеличения Uj, к которым они подключены (например, j= 7-14-2-9-...-5-12, таблица). Каждый последний из сработавших компараторов соответствует ближайшему меньшему Uj по отношению к входному значению ΔU. Номер j периода определяют в блоке 14 путем преобразования кода числа сработавших компараторов с выходов АЦП12 в код j. Код j является кодом старших разрядов на выходе устройства. Код N2 младших разрядов формируют с помощью АЦП13 из выходного напряжения U2 сумматора 6.
Величина допустимого рассогласования между периодически изменяющимися последовательностями угловых значений не должна превышать  во всех условиях эксплуатации.
во всех условиях эксплуатации.
В таком способе исключен грубый отсчет, что значительно упрощает реализацию способа, а выбор числа P1 и P2 периодов изменения первой и второй последовательностей угловых значений в диапазоне измерения не кратным друг другу и не имеющим общих множителей, больших единицы, позволяет известным образом [1] взаимно скомпенсировать пространственные погрешности двух точных отсчетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1993 |
|
RU2108663C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1993 |
|
RU2107390C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2013 |
|
RU2534971C1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ МНОГОКАНАЛЬНОЙ ЦИФРОВОЙ ИНФОРМАЦИИ | 1995 |
|
RU2107953C1 |
| СПОСОБ ПРОВЕРКИ МНОГООТСЧЕТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ВРЕМЕННЫХ ИНТЕРВАЛОВ В КОД | 2007 |
|
RU2349029C1 |
| Преобразователь угла поворота вала в код | 1991 |
|
SU1833966A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ АБОНЕНТОВ С ЦВМ | 1991 |
|
RU2018942C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МНОГОФАЗНОГО ПЕРИОДИЧЕСКОГО СИГНАЛА | 1991 |
|
RU2017063C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 2011 |
|
RU2465723C1 |
| СПОСОБ ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ МНОГОКАНАЛЬНОЙ ЦИФРОВОЙ ИНФОРМАЦИИ | 1995 |
|
RU2107334C1 |

Изобретение относится к области автоматики и вычислительной техники и может быть использовано для связи источников аналоговой информации с цифровым вычислительным устройством. Целью изобретения является расширение диапазона измеряемого угла. Поставленная цель достигается тем, что выбирают число периодов изменения первой и второй последовательностей в диапазоне измерения не кратным друг другу и не имеющим общих множителей, больших единицы, формируют опорные значения смещения для каждого из периодов последовательности с меньшим периодом, определяют в каждом измерении текущее значение смещения одной последовательности относительно другой, которое сравнивают с опорными значениями смещения, определяют номер периода, соответствующий ближайшему меньшему опорному смещению по отношению к текущему смещению, формируют старшую часть выходного кода в виде полученного номера периода опорного смещения, а младшую часть - в виде кода текущего значения последовательности с меньшим периодом. 2 ил., 1 табл.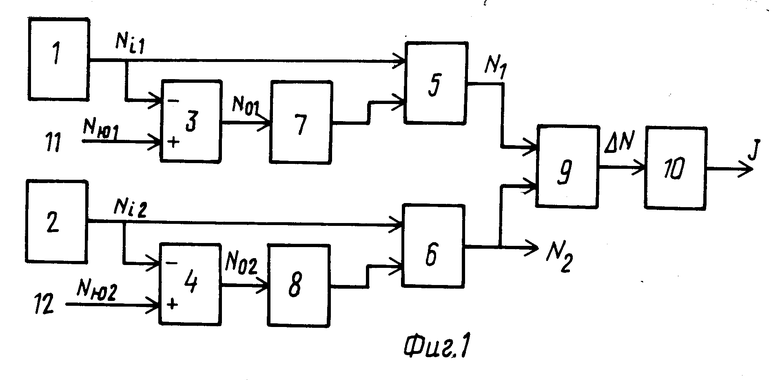
Способ измерения угла поворота вала, основанный на преобразовании угла поворота вала в первую и вторую последовательности угловых значений, периодически изменяющихся по пилообразному закону, определении в исходном положении значений начальных смещений от выбранных юстировочных значений для каждой последовательности угловых значений и их запоминании, формировании текущих угловых значений для каждой последовательности угловых значений суммированием измеренных значений со значениями начальных смещений, отличающийся тем, что выбирают число периодов изменения первой и второй последовательностей угловых значений в диапазоне измерения не кратным друг к другу и не имеющим общих множителей, больших единицы, формируют опорные значения смещения для каждого из периодов последовательности угловых значений с меньшим периодом, определяют текущее значение смещения одной последовательности угловых значений относительно другой, которое сравнивают с опорными значениями смещения, определяют номер периода, соответствующий ближайшему меньшему опорному значению смещения по отношению к текущему значению смещения, формируют старшую часть выходного кода в виде полученного номера периода, а младшую часть - в виде кода текущего значения последовательности угловых значений с меньшим периодом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство N 1381711, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU, патент N 1771069, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
