Изобретение относится к радиолокации и может быть использовано в автоматизированных цифровых системах обнаружения и обработки радиолокационной информации.
Известны способы и устройства сопровождения маневрирующей воздушной цели, основанные на дискретных радиолокационных измерениях координат и текущей оценке (сглаживание и экстраполяции) параметров ее траектории (координат и скоростей их изменения) [1] [2] В предположении, что за время наблюдения цель совершит только один преднамеренный маневр большой интенсивности, при обнаружении маневра память рекуpрентного сглаживающего фильтра минимизируют. В этом случае, хотя динамическая ошибка сглаживания, обусловленная несоответствием гипотезы о степени полинома, описывающего истинную траекторию маневрирующей цели, линейной гипотезе ее движения, компенсируется, случайная составляющая ошибки сглаживания приобретает максимальное для данной точности измерения координат значение, и суммарная ошибка возрастает.
Из известных способов сопровождения маневрирующей воздушной цели наиболее близким к предложенному по технической сущности и достигаемому эффекту является способ, при котором маневр выявляют на основе анализа величины отклонения текущих значений параметров сопровождаемой траектории от их измеренных значений и сравнения этого отклонения с пороговым значением, при выявлении маневра сглаживают параметры траектории с коэффициентами усиления фильтра, равными единице [2]
В связи с тем, что при сглаживании параметров траектории учитывается только факт наличия маневра, погрешности сглаживания при таком способе сохраняются достаточно большими.
Целью изобретения является повышение точности сопровождения низколетящей маневрирующей воздушной цели.
Это достигается тем, что при способе сопровождения низколетящей маневрирующей воздушной цели, основанном на дискретном радиолокационном измерении координат и сглаживании параметров траектории цели с помощью α-β фильтра, на участках прямолинейного движения с коэффициентами усиления фильтра, обусловленными шумом состояния цели, которые определяют из соотношений по пеленгу α  , по скорости изменения пеленга β
, по скорости изменения пеленга β  , и изменении коэффициентов усиления фильтра на участках маневра цели, в момент вхождения на участок траектории, на котором по априорной информации о траекторных особенностях возможен маневр, сглаживают сигнал пеленга цели с коэффициентами усиления фильтра, установленными в соответствии с накопленной вероятностью маневра сопровождаемой цели: Рn= 1/(N-n+1), где N количество измерений на участке возможного маневра и n номер цикла сглаживания на участке возможного маневра, из соотношений по пеленгу
, и изменении коэффициентов усиления фильтра на участках маневра цели, в момент вхождения на участок траектории, на котором по априорной информации о траекторных особенностях возможен маневр, сглаживают сигнал пеленга цели с коэффициентами усиления фильтра, установленными в соответствии с накопленной вероятностью маневра сопровождаемой цели: Рn= 1/(N-n+1), где N количество измерений на участке возможного маневра и n номер цикла сглаживания на участке возможного маневра, из соотношений по пеленгу
α(pn) 
 +
+  -1
-1 

 (1) по скорости изменения пеленга β(Pn)
(1) по скорости изменения пеленга β(Pn) 
 -
-  , где
, где
a  + 2
+ 2  (2)
(2)
r  (3) где
(3) где  дисперсия ошибок измерения пеленга;
дисперсия ошибок измерения пеленга;
a - максимальное ускорение цели по пеленгу на маневре;
- максимальное ускорение цели по пеленгу на маневре;
Ром вероятность правильного обнаружения маневра;
То период обзора РЛС, а в момент обнаружения маневра цели сигнал пеленга однократно сглаживают с коэффициентами усиления фильтра α и β, из соотношения (1) и (2) со значением r из соотношения
r  (4) где Рлом вероятность ложного обнаружения маневра, а на последующих циклах сглаживания параметры траектории цели сглаживают с коэффициентами усиления фильтра, которые определяют из соотношений
(4) где Рлом вероятность ложного обнаружения маневра, а на последующих циклах сглаживания параметры траектории цели сглаживают с коэффициентами усиления фильтра, которые определяют из соотношений
α 


β 

 где
где
α(n )
)  β(n
β(n )
) 
n = int
= int  где i 0, 1, 2, номер цикла после обнаружения маневра;
где i 0, 1, 2, номер цикла после обнаружения маневра;
αm и βm коэффициенты усиления фильтра в момент обнаружения маневра цели.
Известные способы сопровождения низколетящей маневрирующей воздушной цели не имеют признаков, сходных с признаками, отличающими предложенный способ от прототипа. Наличие вновь введенной последовательности действий позволяет повысить точность сопровождения за счет априорной информации о траектории сопровождения воздушной цели и минимизировать в связи с этим ошибки сопровождения, возникающие с пропуском маневра цели. Следовательно, заявленный способ удовлетворяет критериям "Новизны" и "Изобретательный уровень".
Возможность достижения положительного эффекта от предлагаемого способа с вновь введенными признаками, обусловлена компенсацией влияния динамической ошибки экстраполяции пеленга, определяемой маневром цели, пропущенным обнаружителем маневра, путем изменения коэффициентов усиления фильтра в соответствии с накопленной вероятностью маневра.
На фиг. 1 приведена схема маневрирования цели; на фиг. 2 графики, иллюстрирующие эффективность предложенного способа; на фиг. 3 приведена электрическая структурная схема устройства, для осуществления предложенного способа.
Поскольку любая внезапно появившаяся и обнаруженная, например, на корабле-носителе РЛС, низколетящая скоростная воздушная цель будет классифицирована как атакующая, правомерно предположить, что эта цель с высокой вероятностью повернет на корабль, выполняя маневр самонаведения. Другими словами, низколетящая скоростная воздушная цель для поражения корабля в определенный момент времени должна выполнить маневр, в результате которого курсовой параметр цели относительно корабля должен стать равным нулю. В связи с этим предположение об обязательном маневре цели является принципиально обоснованным. В дальнейшем будем рассматривать в качестве воздушной цели противокорабельную крылатую ракету (пкр), выполняющую маневр самонаведения.
Способ основан на использовании траекторных особенностей пкр на конечном участке траектории.
Траектория пкр (см. фиг. 1) на дистанции от объекта поражения менее 30 км включает в себя три характерных участка траектории: прямолинейный участок до начала выполнения маневра самонаведения пкр; участок возможного маневра самонаведения; прямолинейный участок траектории после завершения маневра самонаведения.
Известно, что маневр самонаведения пкр, например, типа "Гарпун", выполняется на дистанциях от корабля-цели 5, 3,20,2 км.
Можно предположить, что на дистанциях больше 20,2 км вероятность маневра близка к нулю, и необходимость ограничения коэффициентов усиления фильтра обусловлена только наличием шума состояния цели.
При отсутствии априорных данных о применяемом противником способе стрельбы пкр в данной конкретной тактической ситуации, есть основания предполагать, что начало маневра самонаведения равновероятно в любой момент времени при нахождении пкр в интервале удалений от корабля Dmin 5,3 км и Dmax 20,2 км. Ракета преодолевает указанный интервал дальности за
t1=  ≃ 50 c где V 290 м/с скорость полета пкр.
≃ 50 c где V 290 м/с скорость полета пкр.
Следовательно, можно предполагать, что за время нахождения пкр на удалении от корабля, позволяющем ей начать маневр самонаведения, будет произведено N N  +1 + 1 измерений ее координат. Поскольку маневр с равной вероятностью может начаться на любом межобзорном интервале, вероятность события, состоящего в начале маневра на n-м (n 1, 2,) интервале априорно равна
+1 + 1 измерений ее координат. Поскольку маневр с равной вероятностью может начаться на любом межобзорном интервале, вероятность события, состоящего в начале маневра на n-м (n 1, 2,) интервале априорно равна
P 
Если на (n-1)-м измерении координат начало маневра не обнаружено, то накопленная вероятность маневра на n-м измерении определяется соотношением
P =
= 
Зависимость дисперсии ускорения пкр на маневре от накопленной вероятности может быть выражена следующим образом:
σ (1+4Pn)(1-Pом) (5) где a
(1+4Pn)(1-Pом) (5) где a максимальное ускорение пкр по пеленгу на маневре (3.5g);
максимальное ускорение пкр по пеленгу на маневре (3.5g);
Ром вероятность правильного обнаружения маневра.
Зная дисперсию ускорения пкр (σ a ), а также полагая известными значения ошибок измерения пеленга
), а также полагая известными значения ошибок измерения пеленга  , можно рассчитать оптимальные для текущих соотношений дисперсии ошибок измерений координат, возмущающего пеленг ускорения и период обзора РЛС значения коэффициентов усиления фильтра: по пеленгу
, можно рассчитать оптимальные для текущих соотношений дисперсии ошибок измерений координат, возмущающего пеленг ускорения и период обзора РЛС значения коэффициентов усиления фильтра: по пеленгу
α(Pn)  (6) по скорости изменения пеленга β(Pn)
(6) по скорости изменения пеленга β(Pn)  где σo2 дисперсия ошибок оценивания пеленга;
где σo2 дисперсия ошибок оценивания пеленга; дисперсия ошибок измерения пеленга;
дисперсия ошибок измерения пеленга;
Rо коэффициент корреляции ошибок оценивания пеленга и скорости его изменения.
Значения σo и Rо определены следующими соотношениями
σ
 +
+  -1
-1 


Ro= 

 (7)
(7)
Подставляя в соотношение (7) соотношения (2) и (3) получаем дисперсию ошибок оценивания пеленга и коэффициента корреляции ошибок оценивания пеленга и скорости его изменения, и, подставляя в выражение (6), получаем коэффициенты усиления фильтра, определяемые соотношением (1).
Очевидно, что по мере приближения пкр с каждым обзором накопленнaя вероятность маневра увеличивается, что вызывает увеличение дисперсии ускорения пкр и соответственно влечет увеличение коэффициентов усиления фильтров α и β.
С обнаружением маневра накопленной вероятности маневра присваивают значение "единица", а дисперсию ускорения пкр вычисляют следующим образом: =
=  a
a
При этом r вычисляют из соотношения (4), коэффициенты усиления фильтра приобретают максимальное значение.
Учитывая кратковременность маневра пкр (1. 3 с), достаточно одного сглаживания с увеличенными коэффициентами усиления (это подтверждают результаты имитационного моделирования).
Процедура оценивания вероятности маневра выполняется в промежутке дальности от 20,2 до 5,3 км.
После обнаружения маневра коэффициентам усиления фильтра по пеленгу присваивают значения, обусловленные только шумом состояния цели, коэффициенты усиления по дальности в течении всего времени сопровождения остаются постоянными, и их значения выбирают в соответствии с шумом состояния цели.
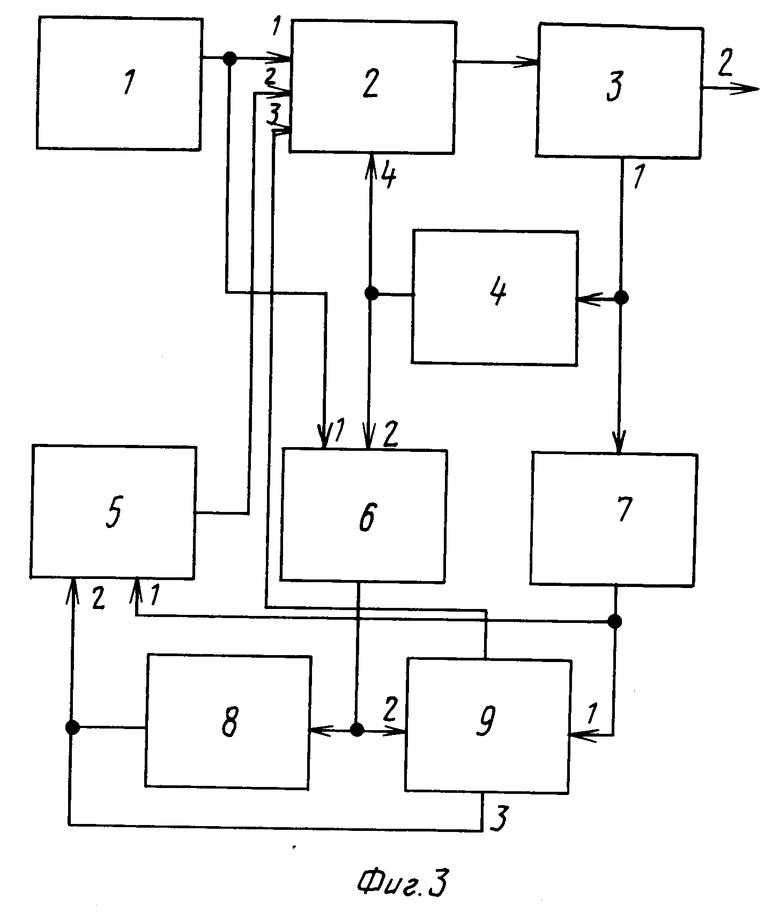
На фиг. 3 приведено устройство автоматического сопровождения маневрирующей воздушной цели, реализующее предлагаемый способ.
Оно содержит датчик измеренных координат 1, блок сглаживания 2, блок экстраполяции 3, первый блок задержки 4, блок памяти 5, блок обнаружения маневра 6, блок сравнения 7, второй блок задержки 8, блок 9 вычисления коэффициентов усиления фильтра.
Устройство автоматического сопровождения маневрирующей воздушной цели состоит из последовательно соединенных датчика 1 измеренных координат, вход которого является входом устройства, выход датчика 1 измеренных координат соединен с 1-м входом блока 2 сглаживания и с 1-м входом блока 6 обнаружения маневра, выход блока 2 сглаживания соединен с входом блока 3 экстраполяции, 1-й выход блока 3 экстраполяции соединен с входом блока 7 сравнения и через блок 4 задержки с 4-м входом блока 2 сглаживания и с 2-м входом блока 6 обнаружения маневра, 2-й выход блока 3 экстраполяции является выходом устройства, выход блока 6 обнаружения маневра соединен с 2-м входом блока 9 вычисления коэффициентов усиления фильтра и через блок 8 задержки со 2-м входом блока 5 памяти и с 3-м входом блока 9 вычисления коэффициентов усиления фильтра, выход блока 7 сравнения соединен с 1-м входом блока 5 памяти и 1-м входом блока 9 вычисления коэффициентов усиления фильтра, выход блока 5 памяти соединен с 2-м входом блока 2 сглаживания, выход блока 9 вычисления коэффициентов усиления фильтра соединен с 3-м входом блока 2 сглаживания.
Устройство работает следующим образом.
Видеосигнал текущего n-го цикла измерения координат сопровождаемой цели с выхода приемного устройства поступает на вход устройства сопровождения и соответственно на датчик 1 измеренных координат. Датчик 1 измеренных координат производит преобразование видеосигнала из аналогового в цифровой вид, выделяет полезный сигнал и измеряет значения координат: пеленга (Пn) и дальности (Dn). Датчик 1 измеренных координат может быть реализован по одной из известных схем автоматического обнаружителя воздушных целей.
Значения измеренных координат цели (Пn и Dn) в виде сигнальных кодов подают на 1-й вход блока 2 сглаживания, который реализует следующим образом операцию обработки координат: при n 1 текущая оценка координат цели равна = Mn, где Mn=
= Mn, где Mn=  Пn, D
Пn, D при n 2 текущая оценка параметров траектории цели равна
при n 2 текущая оценка параметров траектории цели равна = Mn, V
= Mn, V = (Mn-1-Mn)/To где То период обзора РЛС; при n>2 текущая оценка параметров траектории цели равна
= (Mn-1-Mn)/To где То период обзора РЛС; при n>2 текущая оценка параметров траектории цели равна =
=  +α(M
+α(M )
) =
=  +β(M
+β(M )/T где α и β весовые коэффициенты (коэффициенты усиления фильтра);
)/T где α и β весовые коэффициенты (коэффициенты усиления фильтра); и
и  экстраполированные на один обзор оценки координат и скорости их изменения.
экстраполированные на один обзор оценки координат и скорости их изменения.
С блока 2 сглаженные значения координат и скорости их изменения подают на вход блока 3 экстраполяции.
Блок 3 экстраполяции осуществляет формирование экстраполированных на заданное время оценок параметров траектории: =
=  +V
+V Tэ;
Tэ;  =
=  где Тэ заданное значение временных интервалов экстраполяции.
где Тэ заданное значение временных интервалов экстраполяции.
В данном устройстве Тэ То, Тэ Тцу. При этом экстраполированные на время значения координат с 1-го выхода поступают через блок 4 задержки на 4-й вход блока 2 сглаживания, где их используют для вычисления параметров траектории в следующем цикле, и на 2-й вход блока 6 обнаружения маневра, где их вычитают из измеренных значений пеленга, подаваемых на 1-й вход блока 6 обнаружения маневра из датчика 1 измеренных координат, и полученную разность сравнивают с порогом следующим образом: Пn-
Пn- > ρ
> ρ
Значения порога ρ выбирают по соображениям требуемой вероятности ложного обнаружения маневра.
С того же выхода экстраполированные координаты поступают на вход блока 7 сравнения, где сравнивают значения экстраполированной дальности с интервалом дальности возможного маневра от 5,3 до 20,2 км.
Экстраполированные на время Тэ значения координат подают на 2-й выход блока 3 экстраполяции (выход устройства) и используют для формирования и выдачи данных целеуказания потребителей.
В блоке 7 сравнения вырабатывается сигнал логической единицы, если значения экстраполированной дальности лежит в интервале возможного манера, который с выхода блока 7 сравнения поступает на 1-й вход блока 5 памяти, запрещая при этом выдачу коэффициентов усиления фильтра в блок 2 сглаживания, в тоже время этот же сигнал поступает на 1-й вход блока 9 вычисления коэффициентов усиления фильтра и инициирует выдачу коэффициентов усиления в блок 2 сглаживания. Если значения экстраполированной дальности не лежат в пределах интервала дальности возможного маневра, то вырабатывается сигнал логического нуля, запрещающий выдачу коэффициентов усиления из блока 9 вычисления коэффициентов усиления фильтра и инициирующий выдачу коэффициентов усиления из блока 5 памяти.
В блоке 5 памяти хранятся коэффициенты усиления фильтра, значения которых обусловлены шумом состояния цели.
В блоке 9 вычисления коэффициентов усиления фильтра коэффициенты усиления вычисляют в случае прихода сигнала логической единицы и отсутствия сигнала об обнаружении маневра по соотношениям (1), (2) и (3), а в случае прихода сигнала "обнаружен маневр" по соотношениям (1), (2) и (4).
В блоке 6 вырабатывается сигнал "обнаружен маневр" и поступает в блок 9 вычисления коэффициентов усиления фильтра, этот же сигнал поступает на блок 8 задержки и задержанный на один период обзора поступает на блоки 5 и 9 памяти и вычисления коэффициентов усиления фильтра.
Эффективность предложенного способа оценена методом имитационного моделирования при следующих исходных данных:
Дальность пуска пкр типа "гарпун" 100 км;
Перегрузка пкр на маневре 4 g;
Продолжительность маневра 4 с;
Период обзора РЛС 2с;
Маневр начинается в интервале между 13 и 14 обзорами.
На фиг. 2 приведена зависимость нормированной ошибки экстраполяции координаты на один обзор от номера измерения где:
1 предлагаемый способ;
2 известный способ.
При осуществлении предлагаемого способа точность экстраполяции координаты увеличивается в два раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ В РЕЖИМЕ АКТИВНОЙ ЛОКАЦИИ ГИДРОАКУСТИЧЕСКОГО ИЛИ РАДИОЛОКАЦИОННОГО КОМПЛЕКСА | 2003 |
|
RU2260197C2 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| ТРЕХМЕРНЫЙ АДАПТИВНЫЙ α-β ФИЛЬТР | 2016 |
|
RU2631766C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ В ОБЗОРНОЙ ДОПЛЕРОВСКОЙ РЛС | 2023 |
|
RU2815305C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления | 2016 |
|
RU2630252C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ КОМБИНИРОВАННОГО СГЛАЖИВАНИЯ КООРДИНАТ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2556024C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПОДВИЖНОЙ ЦЕЛИ ПРИ СГЛАЖИВАНИИ В ДЕКАРТОВЫХ КООРДИНАТАХ С УЧЕТОМ ИЗМЕРЕНИЙ РАДИАЛЬНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ | 2019 |
|
RU2724115C1 |
| СПОСОБ И СИСТЕМА СОВМЕСТНОЙ ОБРАБОТКИ ИЗМЕРЕНИЙ ДАЛЬНОСТИ И СКОРОСТИ ДЛЯ МНОГОДИАПАЗОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ КРУГОВОГО ОБЗОРА | 2014 |
|
RU2572079C2 |


Использование: в автоматизированных цифровых системах обнаружения и обработки радиолокационной информации. Сущность изобретения: в дискретном радиолокационном измерении координат воздушной цели, сглаживании текущих параметров траектории цели с изменением коэффициентов усиления фильтра в зависимости от накопленной вероятности маневра. Новым является установка коэффициентов усиления фильтра в момент вхождения цели в зону возможного маневра в зависимости от накопленной вероятности маневра. Повышение точности сопровождения достигается за счет компенсации динамической составляющей ошибки сопровождения, обусловленной маневром цели. 3 ил.
СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ, основанный на дискретном радиолокационном измерении координат, сглаживании параметров траектории цели с помощью α-β -фильтра на участках прямолинейного движения с коэффициентами усилителя фильтра, обусловленными шумом состояния цели, которые определяют из соотношений: по пеленгу
где j текущий цикл сглаживания;
по скорости изменения пеленга
и изменении коэффициентом усиления фильтра на участках маневра цели, отличающийся тем, что в момент вхождения на участок траектории, накотором по априорной информации о траекторных особенностях цели возможен маневр, сглаживают сигнал пеленга цели с коэффицциентами усиления фильтра, установленными в соответствии с накопленной вероятностью маневра сопровождаемой цели,
Pn (N n + 1),
где N количество измерений на участке возможного маневра;
n номер цикла сглаживания на участке сглаживания на участке возможного маневра из соотношений по пеленгу (1)
по скорости изменения пеленга (2)

где σ
aβ максимальное ускорение цели по пеленгу на маневре;
Pо.м вероятность правильного обнаружения маневра;
Tо период обзора РЛС,
а в момент времени обнаружения маневра цели сигнал пеленга однократно сглаживают с коэффициентами усиления фильтра a и b из соотношений (1) и (2), со значением r из соотношения
где Pл.о.м вероятность ложного обнаружения маневра, а на последующих циклах сглаживания параметры траектории сглаживают с коэффициентами усиления фильтра, значения которых соответствуют последующим номерам текущего цикла сглаживания, которые определяют из соотношения



где i 0, 1, 2, номер цикла после обнаружения маневра; установленная память фильтра, обусловленная шумом состояния цели;
установленная память фильтра, обусловленная шумом состояния цели;
αm и βm коэффициента усиления фильтра в момент маневра цели.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровая обработка радиолокационной информации, М.: Сов | |||
| радио, 1967, с.317 - 324. | |||
