Предлагаемый способ автоматического сопровождения цели (АСЦ) относится к гидроакустике и радиолокации и предназначен для систем обработки информации в приемных трактах режима активной локации гидроакустических и радиолокационных комплексов.
Автоматическая обработка информации, в том числе способы и устройства автоматического сопровождения цели, широко используются в системах обработки информации режима активной локации [1, 2, 3, 4, 5]. Без автоматического сопровождения в настоящее время невозможно обеспечить качество целеуказания, необходимое для потребителя данной информации.
Известен способ АСЦ, применимый в системах обработки информации режима активной локации (в дальнейшем также - активного локатора), описанный в [1], стр.211-230. Он включает следующие операции:
- излучение зондирующих сигналов трактом излучения активного локатора,
- прием эхо-сигналов приемным трактом активного локатора,
- обнаружение в каждом i-м цикле локатора одиночных отметок маневрирующей цели,
- получение соответствующих ей значений координат - дистанции Di и пеленга Рi,
- построение стробов сопровождения,
- отбор отметок, попавших в стробы сопровождения,
- сглаживание координат отобранных отметок цели,
- определение экстраполированных (упрежденных) координат цели на последующие циклы обзора локатора.
Согласно данному способу для сглаживания и экстраполяции координат цели используют выборку фиксированного объема и критерий максимального правдоподобия.
Известен также способ АСЦ, дополненный обработкой фиксированной по объему выборки независимых измерений радиальной составляющей скорости цели - [1], стр.226. Наличие такой информации позволяет снизить инерционность фильтра сглаживания и повысить точность выработки данных целеуказания.
Однако оба указанных способа имеют тот существенный недостаток, что точность оценки координат цели здесь ограничена объемом выборки измеренных координат цели. При увеличении же объема выборки растет инерционность фильтра сглаживания, что, в свою очередь, ведет к снижению надежности сопровождения и росту ошибок выдачи целеуказания при автоматическом сопровождении маневрирующей цели.
В некоторой степени снизить инерционность фильтра сглаживания удается в способе АСЦ с последовательным сглаживанием координат цели ([1], стр.337), основанного на рекуррентной оценке координат с использованием уравнений фильтра Калмана ([1], стр.348, 354). Недостатком такого способа АСЦ является то, что он предполагает известный, например линейный или квадратичный, характер изменения траектории во времени и постоянство точностей измерения параметров цели. При маневрах цели используют переключение параметров алгоритма сглаживания координат, что существенно затрудняет сопровождение реальных целей, имеющих сложные траектории и совершающих в процессе движения маневры по курсу и по скорости.
В [1], стр.382, и в [3] рассмотрен способ АСЦ, основанный на излучении зондирующих сигналов трактом излучения активного локатора, приеме эхо-сигналов приемным трактом активного локатора, обнаружении в каждом i-м цикле обзора локатора одиночных отметок цели, получении соответствующих им значений координат - дистанции Di и пеленга Рi, построении стробов сопровождения и отборе отметок цели, попавших в стробы сопровождения, сглаживании координат отобранных отметок цели с учетом данных, полученных в пределах «скользящего» временного окна, и определении экстраполированных координат цели на следующий цикл обзора локатора. Этот способ выбран в качестве прототипа предлагаемого способа автоматического сопровождения маневрирующей цели.
В способе-прототипе имеет место последовательный просмотр ограниченных по времени участков траектории цели. Необходимые расчетные соотношения для реализации такого способа АСЦ приведены в [1], стр.383.
Способ-прототип более эффективен при сопровождении маневрирующей цели, нежели описанные выше. Однако и он не обеспечивает для ряда важных практических приложений требуемого качества сопровождения цели в части точности целеуказания и малой величины интервала времени, затрачиваемого на выработку данных целеуказания с требуемой точностью. Это имеет место, например, при сопровождении активным гидролокатором цели типа торпеды, движущейся по догонной траектории. В этом случае требуется, чтобы число циклов обзора гидролокатора не превышало 5...10, иначе задача противоторпедной защиты не будет решена. Расчеты и моделирование алгоритма способа-прототипа показали, что за указанное требуемое число циклов обзора необходимая точность целеуказания не обеспечивается.
Задачей изобретения является повышение точности выдачи целеуказания при автоматическом сопровождении маневрирующей цели путем снижения ошибок сглаживания и инерционности фильтра сглаживания.
Для решения поставленной задачи в способ автоматического сопровождения маневрирующей цели в режиме активной локации гидроакустического или радиолокационного комплекса, основанный на излучении зондирующих сигналов, приеме эхо-сигналов приемным трактом режима активной локации, обнаружении в каждом i-м цикле обзора одиночных отметок маневрирующей цели, получении соответствующих им значений координат - дистанции Di и пеленга Рi, построении стробов сопровождения и отборе отметок, попавших в стробы сопровождения, сглаживании координат отобранных отметок с учетом данных, полученных в пределах «скользящего» временного окна, и определении экстраполированных координат маневрирующей цели на следующий цикл обзора, введены новые признаки, а именно: на каждом i-м цикле обзора при сопровождении маневрирующей цели измеряют величину доплеровского сдвига частоты эхо-сигнала, по которой определяют величину радиальной составляющей скорости VDi маневрирующей цели, приемным трактом режима пассивной локации принимают сигналы собственного излучения маневрирующей цели, по которым определяют угловую скорость VPi цели, при этом сглаживание координат маневрирующей цели выполняют в полярных координатах независимо с учетом радиальной составляющей скорости маневрирующей цели и угловой скорости маневрирующей цели в пределах «скользящего» временного окна из заданного количества N циклов обзора локатора, включающего i-й цикл обзора и N - 1 предшествующих ему циклов обзора.
Для повышения эффективности предложения параметры алгоритма АСЦ выбирают следующим образом.
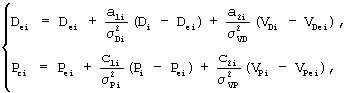
При порядковом номере цикла обзора, удовлетворяющем условию i≤N, сглаженные координаты маневрирующей цели - дистанцию Dci и пеленг Рci, начиная с цикла обзора с порядковым номером i=2, получают как линейную комбинацию экстраполируемых на текущий цикл обзора значений координат - дистанции Dei и пеленга Рei соответственно, взвешенных значений рассогласования экстраполируемых значений координат с их измеренными значениями и рассогласования экстраполируемых значений радиальной составляющей скорости маневрирующей цели VDei и угловой скорости маневрирующей цели VPei с измеренными значениями этих величин:

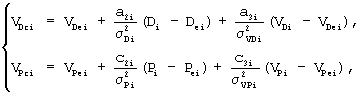
Сглаженные значения радиальной составляющей скорости маневрирующей цели VDci и угловой скорости маневрирующей цели VPci получают как линейную комбинацию экстраполируемых на текущий цикл обзора значений этих скоростей и взвешенных значений рассогласования экстраполируемых значений дистанции и пеленга с их измеренными значениями соответственно и взвешенных значений рассогласования экстраполируемых значений радиальной составляющей скорости маневрирующей цели и угловой скорости маневрирующей цели с их измеренными значениями соответственно:

где σDi и σPi - среднеквадратические отклонения, или измерительные ошибки по дальности и пеленгу соответственно,
σVDi и σVPi - среднеквадратические отклонения радиальной составляющей скорости маневрирующей цели и угловой маневрирующей скорости цели соответственно.
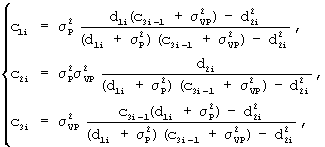
При этом весовые коэффициенты а1i, а2i, а3i, с1i, c2i, c3i определяют рекуррентно:
где 

исходные значения коэффициентов а1i, а2i, а3i, с1i, c2i, c3i, соответствующие обнаружению отметки маневрирующей цели, следующей за первичной (i=2), принимают равными:
где 
 , Т - длительность цикла обзора, экстраполированные значения координат, радиальной составляющей скорости маневрирующей цели и угловой скорости маневрирующей цели определяют из выражений:
, Т - длительность цикла обзора, экстраполированные значения координат, радиальной составляющей скорости маневрирующей цели и угловой скорости маневрирующей цели определяют из выражений:
Dei+1=Dci+VDci T,
Pei+1=Pci+VPci Т,
VDei+1=VDci,
При порядковом номере цикла обзора, удовлетворяющем условию i>N, координаты (i-N+1)-го цикла обзора рассматривают как координаты первичной отметки, сглаженные и экстраполированные значения координат для i-го цикла обзора получают в результате последовательного пересчета сглаженных и экстраполированных координат, начиная с пересчета сглаженных и экстраполированных координат, начиная с (i-N+1)-го цикла обзора и кончая i-м циклом с помощью приведенных выше выражений (1...9).
Параметры алгоритма АСЦ могут быть выбраны и другими, в зависимости от характера маневрирования цели того или иного класса.
Для более эффективного сопровождения приближающейся маневрирующей цели предлагается размер «скользящего» временного окна выполнить переменным и уменьшать размер по мере приближения маневрирующей цели.
Технический результат при реализации настоящего предложения заключается в снижении ошибок сопровождения маневрирующей цели; уменьшении времени выработки данных целеуказания потребителю в ряде важных практических ситуаций, например при интенсивном маневрировании цели, а также на догонном участке ее траектории, что в совокупности приводит к повышению эффективности автоматического сопровождения. Это обеспечивается тем, что вместо применения при сопровождении маневрирующей цели алгоритма сглаживания в прямоугольных координатах; традиционных алгоритмов Калмановской фильтрации; «скользящего» временного окна постоянной величины, - предлагается реализовать алгоритмы сглаживания в полярных координатах с учетом радиальной составляющей скорости цели и ее угловой скорости; применять разработанные авторами более эффективные варианты Калмановской фильтрации для сглаживания траектории маневрирующей цели; в процессе сближения с целью изменять (уменьшать) размер «скользящего» временного окна.
Предлагаемый способ может быть применен в приемных трактах режима активной локации гидроакустических и радиолокационных комплексов и в других информационных системах, где используется метод активной локации маневрирующих целей. В качестве примера ниже рассмотрена реализация предложения в устройстве, соответствующем приемному тракту гидроакустического комплекса (ГАК).
Сущность изобретения поясняется фиг.1...5.
На фиг.1 представлена блок-схема устройства, соответствующего приемному тракту гидроакустического комплекса.
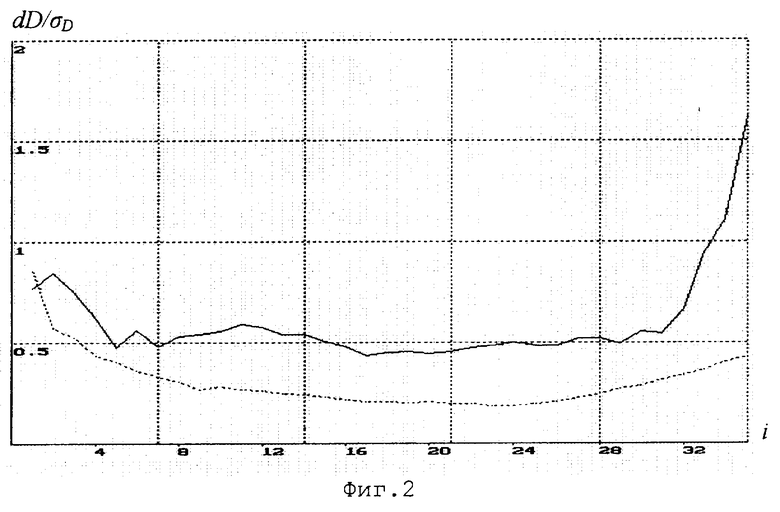
На фиг.2 показаны зависимости относительных ошибок dD/σD сглаживающего фильтра Калмана по дистанции (здесь dD - ошибка сглаживающего фильтра по дальности, σD - ошибка единичного замера или измерительная ошибка по дальности) от числа i циклов обзора локатора при сопровождении в различных системах координат (сплошная линия - сопровождение в декартовых координатах, пунктирная линия - сопровождение в полярных координатах).
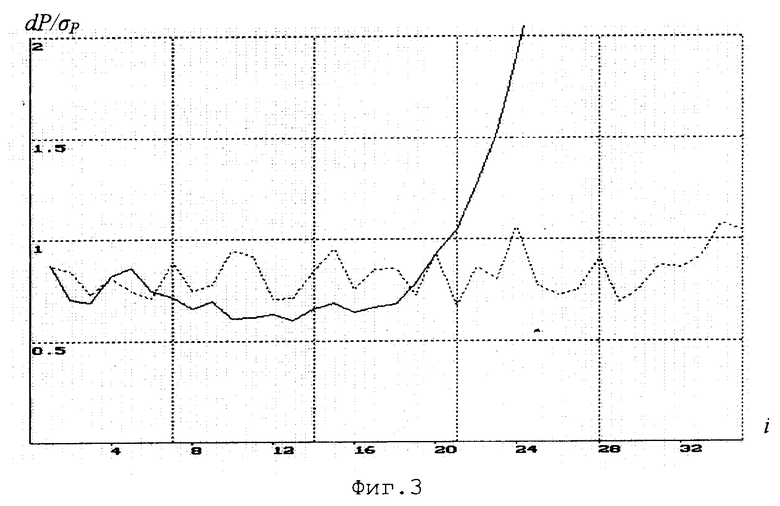
На фиг.3 показаны зависимости относительных ошибок dP/σP сглаживающего фильтра Калмана по пеленгу (здесь dP - ошибка сглаживающего фильтра по дальности, σP - ошибка единичного замера или измерительная ошибка по пеленгу) от числа i циклов обзора локатора при сопровождении в различных системах координат (сплошная линия - сопровождение в декартовых координатах, пунктирная линия - сопровождение в полярных координатах).
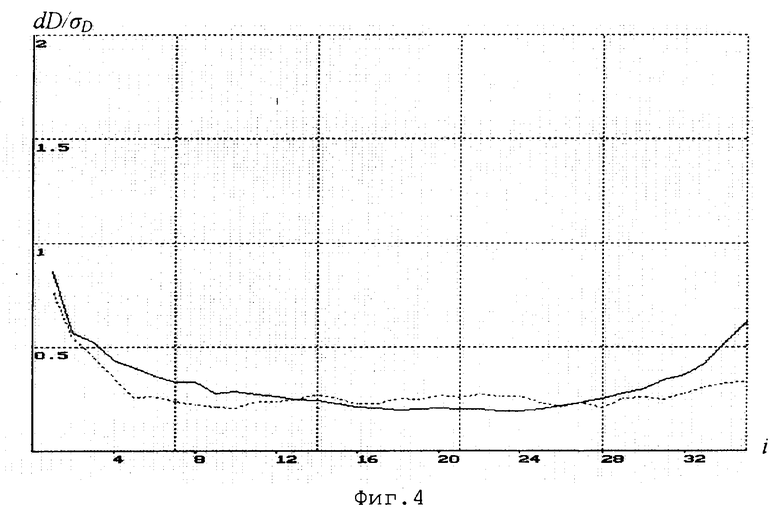
На фиг.4 показаны зависимости относительных ошибок dD/σD сглаживающего фильтра Калмана по дистанции (здесь dD - ошибка сглаживающего фильтра по дальности, σD - ошибка единичного замера или измерительная ошибка по дальности) от числа i циклов обзора локатора, полученные при постоянной (сплошная линия) и переменной (пунктирная линия) величине «скользящего» временного окна.
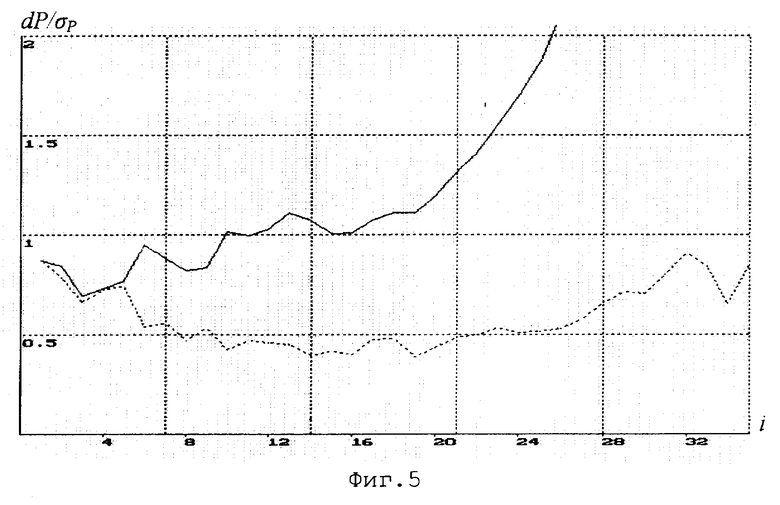
На фиг.5 показаны зависимости относительных ошибок dP/σP сглаживающего фильтра Калмана по пеленгу (здесь dP - ошибка сглаживающего фильтра по дальности, σP - ошибка единичного замера или измерительная ошибка по пеленгу) от числа i циклов обзора локатора, полученные при постоянной (сплошная линия) и переменной (пунктирная линия) величине «скользящего» временного окна.
Изобретение реализуется программно-аппаратными средствами цифрового вычислительного комплекса ГАК.
Устройство (см. фиг.1) содержит тракт 1 излучения гидролокатора комплекса, выход которого соединен с входом коммутатора 2 приема-передачи (КПП), первый выход коммутатора 2 соединен с входом приемно-излучающей акустической антенны 3, общей для режимов активной и пассивной гидролокации, второй выход коммутатора 2 соединен с входом устройства 4 предварительного усиления и аналого-цифрового преобразования сигналов (УПУ и АЦП). Выход устройства 4 соединен с входом системы 5 формирования характеристик направленности (СФХН) цифрового вычислительного комплекса (ЦВК) 6.
ЦВК 6 включает систему 5 формирования характеристик направленности, последовательно соединенные систему 7 первичной обработки информации в режиме активной гидролокации (СПО АГЛ), систему 8 автоматического обнаружения в режиме активной гидролокации отметок маневрирующей цели (САО), систему 9 измерения дистанции и пеленга маневрирующей цели в режиме активной гидролокации (СИДП АГЛ), последовательно соединенные систему 10 первичной обработки информации в режиме пассивной гидролокации (СПО ПГЛ), и систему 11 автоматического сопровождения маневрирующей цели в режиме пассивной гидролокации (АСЦ ПГЛ), и систему 12 автоматического сопровождения маневрирующей цели в режиме активной гидролокации (АСЦ АГЛ).
Система 12 включает блок 13 определения радиальной составляющей скорости маневрирующей цели VDi, блок 14 определения угловой скорости цели маневрирующей цели VPi, а также последовательно соединенные блок 15 ввода измеренных координат маневрирующей цели, блок 16 формирования стробов сопровождаемой маневрирующей цели и отбора отметок маневрирующей цели, блок 17 вычисления по формулам (1-8) сглаженных координат сопровождаемой маневрирующей цели (БВСК), блок 18 вычисления по формулам (9) экстраполированных координат маневрирующей цели (БВЭК) и блок 19 выдачи целеуказания (ЦУ) потребителям.
При этом информационные выходы системы 5 соединены с входами систем 7 и 10. Выход системы 7 соединен с входом системы 8, выходы которой соединены с входами системы 9 и блока 13. Выход системы 9 соединен с входом блока 15, а выход блока 15 - с первым входом блока 16. Выход блока 13 соединен с первым входом блока 17. Выход системы 10 соединен с входом системы 11, выход системы 11 соединен с входом блока 14, а выход блока 14 соединен со вторым входом блока 17, третий вход которого соединен с выходом блока 16. Второй вход блока 16 связан с первым выходом блока 18, вход блока 18 связан с первым выходом блока 17, а второй выход блока 18 связан с четвертым входом блока 17. Второй выход блока 17 связан с входом блока 19.
Устройство представляет собой приемный тракт гидроакустического комплекса, содержащий акустическую антенну, предварительные усилители и цифровой вычислительный комплекс обработки информации и управления. Рассматриваемый приемный тракт соответствует приемному тракту современного гидроакустического комплекса, описание которого приведено, например, в [6], стр.428-431. Пассивную локацию маневрирующей цели осуществляет приемный тракт режима пассивной гидролокации ГАК. Принцип действия и структура приемного тракта режима пассивной гидролокации описаны в ряде работ, например в [10], стр.231-233.
Предлагаемый способ реализуется следующим образом.
В процессе работы гидроакустического комплекса тракт излучения 1 вырабатывает зондирующие сигналы, которые через коммутатор 2 приема-передачи поступают на акустическую антенну 3 и излучаются в воду. Смесь помехи и полезных сигналов (эхо-сигналы и шумовые сигналы маневрирующей цели) с выходов акустических преобразователей антенны 3 через коммутатор 2 приема-передачи поступают на устройство 4 предварительного усиления и аналого-цифрового преобразования. Здесь сигналы усиливают, фильтруют и подвергают преобразованию в цифровую форму, после чего они поступают на вход системы 5 формирования характеристик направленности в режимах активной и пассивной гидролокации, входящей в состав ЦВК 6. Системы 7 и 10 осуществляют первичную обработку информации соответственно в режимах активной и пассивной гидролокации. В системе 7 реализуется согласованная фильтрация эхо-сигналов в пределах доплеровской полосы частот. В системе 10 осуществляется фильтрация шумовых сигналов цели, квадратичное детектирование и интегрирование сигналов во времени. Выходные сигналы системы 7 поступают на систему 8 автоматического обнаружения отметок цели, где реализуется алгоритм обнаружения отметок цели на каждом цикле обзора локатора. Выходные сигналы системы 10 поступают на вход системы 11 автоматического сопровождения цели в режиме пассивной гидролокации. Информация от системы 8 автоматического обнаружения отметок цели поступает как на вход системы 9 измерения дистанции и пеленга маневрирующей цели (время измерения, номер пространственного канала), так и на вход блока 13 определения радиальной составляющей скорости маневрирующей цели системы 12 автоматического сопровождения цели в режиме активной гидролокации (номер доплеровского канала). Радиальная составляющая скорости маневрирующей цели рассчитывается в блоке 13 согласно известным соотношениям эффекта Доплера между радиальной скоростью цели и частотой эхо-сигнала, определяемой по значению номера доплеровского канала (см. например, [7], стр.34). Мгновенные значения пеленга сопровождаемой в режиме пассивной гидролокации поступают из системы 11 на вход блока 14 определения угловой скорости цели. В этом блоке определяют угловую скорость маневрирующей цели VP из выражения:
Здесь P1, P2 - измеренные в системе 11 величины пеленга маневрирующей цели в моменты времени Т1, Т2; Т=Т1-Т2.
Данные об измеренных координатах обнаруженной в режиме активной гидролокации цели из системы 9 поступают на вход блока 15 ввода измеренных координат и далее на вход блока 16 формирования строба и отбора отметки сопровождаемой маневрирующей цели. Принцип работы и структура алгоритмов этого блока описаны, например, в [1], стр.198, 199, 236-249. Координаты стробов определяются соответственно результатам экстраполяции, которые вырабатывает блок 18. Измеренные на каждом цикле обзора координаты сопровождаемой маневрирующей цели из блока 16 поступают на вход блока 17 сглаживания координат. На вход этого блока поступают также рассчитанные в блоке 13 данные о радиальной составляющей скорости маневрирующей цели и рассчитанные в блоке 14 данные об угловой скорости маневрирующей цели. В блоке 17 согласно формулам (1-5) реализуется предлагаемый алгоритм сглаживания координат маневрирующей цели в «скользящем» временном окне. Экстраполяция координат маневрирующей цели производится, согласно формулам (6), в блоке 18, куда поступает необходимая информация из блока 17. В свою очередь, на вход блока 17 из блока 18 поступает информация об экстраполированных координатах маневрирующей цели согласно формулам (1-5). Данные целеуказания (сглаженные координаты и время их выработки) из блока 17 поступают в блок 19 выдачи целеуказания потребителю.
Эффективность предложения проверена в процессе проектирования ГАК, разрабатываемого в ЦНИИ «Морфизприбор». Выполнен большой объем компьютерного моделирования, позволивший выбрать оптимальные параметры нового способа АСЦ и сравнить его эффективность с известными способами. При моделировании задавались различные практически важные траектории основных типов сопровождаемых целей.
Некоторые результаты компьютерного моделирования, подтверждающего эффективность предложения, приведены на фиг.2...5. Здесь показаны зависимости относительных ошибок сглаживания по дальности  и по пеленгу
и по пеленгу  от числа циклов обзора, полученные при автоматическом сопровождении скоростной маневрирующей цели, двигающейся по догонной траектории.
от числа циклов обзора, полученные при автоматическом сопровождении скоростной маневрирующей цели, двигающейся по догонной траектории.
На фиг.2, 3 показаны относительные ошибки сглаживания при калмановской фильтрации с использованием данных по радиальной составляющей скорости маневрирующей цели и угловой скорости маневрирующей цели и сопровождении в полярных координатах (пунктирные линии) и в прямоугольных координатах (сплошные линии). Как следует из полученных результатов, сглаживание координат сопровождаемой маневрирующей цели в полярных координатах позволяет снизить ошибки сглаживания (по дальности - до 30% от измерительной ошибки).
На фиг.4, 5 показаны относительные ошибки предлагаемого способа сглаживания, полученные с использованием данных по радиальной составляющей скорости маневрирующей цели и угловой скорости маневрирующей цели, при постоянном по размеру «скользящем» временном окне (сплошные линии) и переменном (уменьшающемся с ростом номера цикла обзора i) временном окне (пунктирные линии). Как следует из полученных результатов, применение «скользящего» временного окна, уменьшающегося с ростом номера цикла обзора, позволяет существенно снизить ошибки сглаживания (до 20-40%) как по дальности, так и по пеленгу и избежать расходимости (резкого возрастания ошибок сглаживания) фильтра.
В случае применения предложения в радиолокационном комплексе в качестве преобразователя электромагнитной энергии в электрическую и обратно может быть использована, например, фазированная антенная решетка - ФАР. Принципы пространственно-временной обработки информации в режиме активной радиолокации описаны в многочисленных монографиях, например в [1, 2, 6-9]. Широко известны также принципы построения приемных трактов пассивных радиолокаторов, в которых для получения информации о местоположении цели используется электромагнитное излучение нагретой поверхности целей, а также выхлопных газов целей типа самолетов и ракет (см. [7], стр.11, 14-16; [8], стр.188, 429-438; [9], стр.10, 208-220). При частотно-временной обработке сигналов в пассивном радиолокаторе, как и в пассивном гидролокаторе ГАК, осуществляется фильтрация сигналов электромагнитного излучения цели, квадратичное детектирование и интегрирование сигналов во времени - [8], стр.433.
Источники информации
1. Кузьмин С.З. - Основы теории цифровой обработки радиолокационной информации. М., СР. 1974.
2. Саврасов Ю.С. - Алгоритмы и программы в радиолокации. М.: Радио и связь. 1985.
3. Романенко А.Ф., Сергеев Г.А. - Вопросы прикладного анализа случайных процессов. М., СР. 1968.
4. Патент Японии. Система сопровождения радиолокационной цели. JP №3122389 от 28.03.97.
5. Патент Японии. Устройство сопровождения цели. JP №3126928 от 30.09.96.
6. Применение цифровой обработки сигналов. Под ред. Э.Оппенгейма. Перевод с англ. М.: Мир. 1980.
7. Лезин Ю.С. Введение в теорию и технику радиотехнических систем. М.: Радио и связь. 1986.
8. Радиотехнические системы. Под ред. Ю.М. Казаринова. М.: Высшая школа. 1990.
9. Дымова и др. Радиотехнические системы. М., СР. 1975.
10. Терминологический словарь-справочник по гидроакустике. Под ред. А.Е. Колесникова. Л.: Судостроение. 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АКТИВНОЙ ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2009 |
|
RU2393503C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПОДВИЖНОЙ ЦЕЛИ ПРИ СГЛАЖИВАНИИ В ДЕКАРТОВЫХ КООРДИНАТАХ С УЧЕТОМ ИЗМЕРЕНИЙ РАДИАЛЬНОЙ СОСТАВЛЯЮЩЕЙ СКОРОСТИ | 2019 |
|
RU2724115C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| СПОСОБ КОМБИНИРОВАННОГО СГЛАЖИВАНИЯ КООРДИНАТ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2556024C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СПОСОБ БЕССТРОБОВОГО АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2551356C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ В ОБЗОРНОЙ ДОПЛЕРОВСКОЙ РЛС | 2023 |
|
RU2815305C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
Изобретение относится к гидроакустике и радиолокации и предназначено для систем обработки информации в приемных трактах режима активной локации гидроакустических и радиолокационных комплексов. Технический результат заключается в снижении ошибок сопровождения маневрирующей цели, уменьшении времени выработки данных целеуказания потребителю, что приводит к повышению эффективности автоматического сопровождения. Способ основан на излучении зондирующих сигналов, приеме эхо-сигналов приемным трактом режима активной локации, обнаружении в каждом i-м цикле обзора (ЦО) одиночных отметок маневрирующей цели (МЦ), получении соответствующих им значений координат - дистанции и пеленга, построении стробов сопровождения и отборе отметок, попавших в стробы сопровождения, сглаживании координат отобранных отметок с учетом данных, полученных в пределах "скользящего" временного окна, и определении экстраполированных координат МЦ на следующий ЦО, на каждом i-м ЦО при сопровождении МЦ измеряют величину доплеровского сдвига частоты эхо-сигнала, по которой определяют величину радиальной составляющей скорости МЦ, приемным трактом режима пассивной локации принимают сигналы собственного излучения МЦ, по которым определяют угловую скорость МЦ, при этом сглаживание координат МЦ выполняют в полярных координатах независимо, с учетом радиальной составляющей скорости МЦ и угловой скорости МЦ, в пределах "скользящего" временного окна из заданного количества N ЦО, включающего i-й ЦО и N-1 предшествующих ему ЦО. 2 з.п. ф-лы, 5 ил.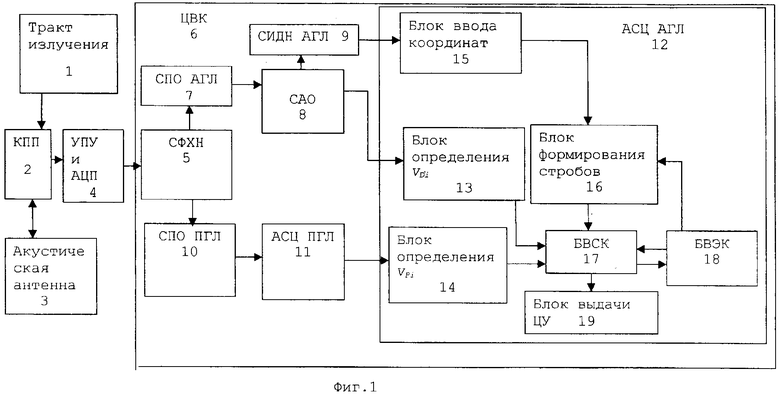
сглаженные значения радиальной составляющей скорости маневрирующей цели VDci и угловой скорости маневрирующей цели VPci получают как линейную комбинацию экстраполируемых на текущий цикл обзора значений радиальной составляющей скорости маневрирующей цели и угловой скорости маневрирующей цели соответственно, взвешенных значений рассогласования экстраполируемых значений дистанции и пеленга с их измеренными значениями соответственно и взвешенных значений рассогласования экстраполируемых значений радиальной скорости маневрирующей цели и угловой скорости маневрирующей цели с их измеренными значениями соответственно
где σVD и σVP - соответственно среднеквадратические отклонения радиальной составляющей скорости маневрирующей цели и угловой скорости маневрирующей цели, σD и σP - среднеквадратические отклонения по дальности и пеленгу, соответственно, при этом весовые коэффициенты а1i, a2i, a3i, c1i, с2i, с3i, определяют рекуррентно
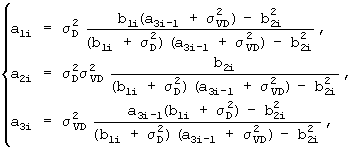
где 

исходные значения коэффициентов а1i, а2i, а3i, c1i, с2i, c3i, соответствующие обнаружению отметки маневрирующей цели, следующей за первичной (i=2), принимают равными
где
 ,
,
T - длительность цикла обзора, экстраполированные значения координат, радиальной составляющей скорости маневрирующей цели и угловой скорости маневрирующей цели определяют из выражений Dei+i=Dci+YDci·T, Pei+i=Pci+VPci·T, VDei+1=VDci, VPei+1=VPci;
а при порядковом номере цикла обзора, удовлетворяющем условию i>N, координаты (i-N+1)-го цикла обзора рассматривают как координаты первичной отметки, сглаженные и экстраполированные значения координат для i-го цикла обзора получают в результате последовательного пересчета сглаженных и экстраполированных координат, начиная с (i-М+1)-го цикла обзора и кончая i-м циклом.
| КУЗЬМИН С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| М.: Советское Радио, 1974, с.211-230 | |||
| СПОСОБ РАНЖИРОВАНИЯ ЦЕЛЕЙ | 2000 |
|
RU2190863C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2001 |
|
RU2196341C1 |
| US 5144316 A, 01.09.1992 | |||
| US 5422828 A, 06.06.1995 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПРОИЗВОДНЫХ 3-АРОИЛАНТРА-[1,9-cd]ИЗОКСАЗОЛ-6-ОНА | 2007 |
|
RU2330028C1 |

