Изобретение относится к подземному строительству, а именно к устройствам автоматического управления движением продавливаемого трубопровода при его бестраншейной прокладке.
Известно устройство управления движением продавливаемого трубопровода, содержащее систему контроля углового положения головной секции продавливаемого трубопровода и установленное в монтажной камере приводное устройство, связанное с гидроцилиндрами управления, установленными между головной секцией и продавливаемым трубопроводом [1]
Система контроля углового положения выполнена в виде источника светового излучения и теодолита, установленных в монтажной камере, и мишени, расположенной в головной секции.
Недостатками указанного устройства является то, что при продавливании трубопровода на большие расстояния и на криволинейных участках возможен уход мишени от светового луча, генерируемого из монтажной камеры.
Указанная система контроля углового положения обеспечивает определение углов отклонения в горизонтальной и вертикальной плоскостях (азимутальный угол и угол наклона) и не обеспечивает определения угла крена, который образуется при закручивании трубы.
Кроме того не обеспечено автоматическое управление приводным устройством.
Наиболее близким к предлагаемому является устройство автоматического управления движением продавливаемого трубопровода, содержащее гидродомкраты управления, установленные между головной секцией и продавливаемым трубопроводом, датчики и установленный в монтажной камере блок управления, включающий реверсивный счетчик, дешифратор, преобразователь, показывающий прибор и усилители, связанные с гидродомкратами управления [2]
Недостатками указанного устройства является отсутствие датчика для измерения угла крена (закручивания), в результате чего оси чувствительности датчиков не соответствуют осям приложения усилий гидродомкратов.
Из-за того, что цепочка измерения сигнала рассогласования используется только для регистрации углов отклонения, а не для управления, и в то же время использование аналоговой системы управления гидродомкратами приводит к появлению нулевого сигнала кажущегося рассогласования датчиков, которое меняется во время работы из-за разогрева, омывания водой и т.п. что приводит к ошибке.
Кроме того использование дифференциальных трансформаторных датчиков, установленных на гидродомкратах, не обеспечивает необходимой точности управления, так как принцип измерения построен на измерении зазора между торцом трубопровода и головной секцией, в то время как сам трубопровод в процессе продавливания может отклониться.
Целью изобретения является повышение точности управления движением продавливаемого трубопровода путем возможности измерения как азимутального угла, угла наклона, так и угла крена, а также обеспечение достоверных значений углов отклонения, задаваясь не фактическими значениями траектории продавливаемого трубопровода, а проектными значениями.
Цель достигается тем, что датчики установлены на головной секции продавливаемого трубопровода и выполнены в виде трех лазерных гироскопов, оси которых взаимно ортогональны, а ось одного из лазерных гироскопов параллельна продольной оси головной секции, блок управления снабжен двумя дополнительными реверсивными счетчиками, при этом входы реверсивных счетчиков соединены с выходами лазерных гироскопов, выходы реверсивных счетчиков соединены с входами дешифратора, один из выходов которого соединен с входом показывающего прибора, а другой выход соединен с входом цифроаналогового преобразователя, выход которого соединен с входами усилителей.
Выполнение датчиков в виде лазерных гироскопов, установленных на головной секции продавливаемого трубопровода, позволит получить сигналы при отклонении головной секции от проектного положения от любой из трех пространственных осей. Новые связи элементов блока управления обеспечивают автоматическое управление от полученного сигнала.
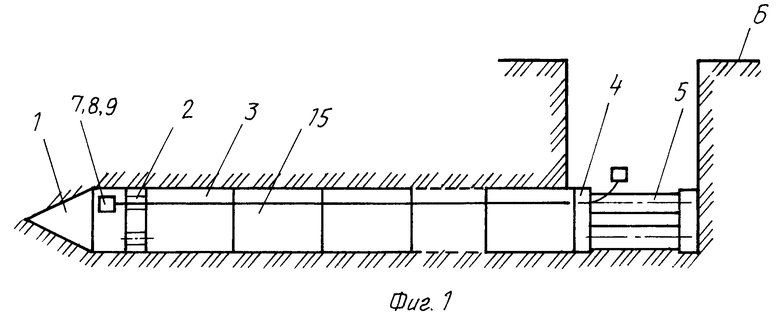
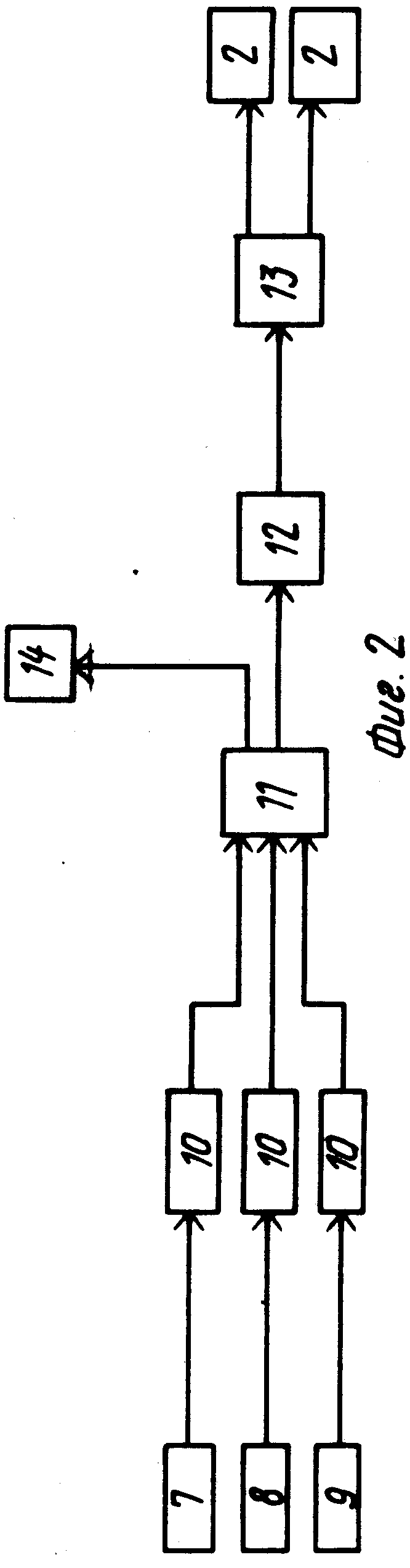
На фиг. 1 изображено устройство автоматического управления движением продавливаемого трубопровода в продавливающей установке; на фиг.2 блок-схема предлагаемого устройства.
Устройство автоматического управления движением продавливаемого трубопровода содержит головную секцию 1, связанную гидродомкратами 2 управления с продавливаемым трубопроводом 3.
Продавливаемый трубопровод 3 посредством нажимного устройства 4 связан с гидродомкратами 5 продавливания, установленными в монтажной камере 6.
На головной секции 1 установлены датчики, выполненные в виде трех лазерных гироскопов 7,8,9, смонтированных в моноблоке, оси x,y,z которых взаимно ортогональны, а одна из осей одного из лазерных гироскопов параллельна продольной оси головной секции 1.
В монтажной камере 6 установлен блок управления, который содержит реверсивные счетчики 10, дешифратор 11, цифроаналоговый преобразователь 12, усилители 13 и показывающий прибор 14.
Входы реверсивных счетчиков 10 соединены с выходами лазерных гироскопов 7,8,9 гибкими кабелями 15, а выходы реверсивных счетчиков 10 соединен с входами дешифратора 11, один из выходов которого соединен с показывающим прибором 14, а другой выход соединен с входом цифроаналогового преобразователя 12. Выход цифроаналогового преобразователя 12 соединен с входами усилителей 13, которые связаны с гидродомкратами 2 управления.
Устройство работает следующим образом.
При совпадении фактического положения головной секции 1 продавливаемого трубопровода 3 с проектным оси х,у,z лазерных гироскопов совпадают с осями xo, yo, zo заданного проектного положения продавливаемого трубопровода 3. В этом случае углы отклонения от проектного положения Ψxo=Ψyo=Ψzo 0.
При отклонении головной секции 1 от одной из трех осей хо, yo, zo проектного положения продавливаемого трубопровода 3 в соответствующем лазерном гироскопе возникает разность частот бегущих навстречу световых волн, которая на выходе преобразуется в импульсный сигнал.
Импульсные сигналы поступают на входы реверсивных счетчиков 10, затем на входы дешифратора 11, цифроаналогового преобразователя 12, усилителей 13. Сигнал с усилителей 13 включает или отключает приводное устройство соответствующего гидродомкрата 2 управления.
Одновременно сигнал с дешифратора 11 поступает к показывающему прибору 14 для снятия информации о величине отклонения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПРОХОДЧЕСКОГО ЩИТА | 1992 |
|
RU2034144C1 |
| СПОСОБ СООРУЖЕНИЯ ТОННЕЛЯ | 1994 |
|
RU2057941C1 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС И ШЛАМОВАЯ ЕМКОСТЬ | 1991 |
|
RU2019703C1 |
| ПРОХОДЧЕСКИЙ ЩИТ | 1992 |
|
RU2041357C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГО ЩИТА | 1990 |
|
RU2013555C1 |
| ТОННЕЛЬНАЯ ОБДЕЛКА | 1989 |
|
RU2013557C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
| Устройство для регистрации квазистационарных процессов | 1985 |
|
SU1357850A1 |
| САМООРИЕНТИРУЮЩИЙСЯ В АЗИМУТЕ ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2123664C1 |
Изобретение относится к подземному строительству. Сущность изобретения: устройство автоматического управления движением продавливаемого трубопровода содержит гидродомкраты управления, установленные между головной секцией и продавливаемым трубопроводом, датчики, установленные на головной секции и связанные гибкими кабелями с блоком управления, установленным в монтажной камере. Датчики выполнены в виде трех лазерных гироскопов. Блок управления содержит реверсивные счетчики, дешифратор, цифроаналоговый преобразователь, усилители и показывающий прибор. Сигнал с блока управления включает или отключает соответствующий гидродомократ управления. 2 ил.
УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОДАВЛИВАЕМОГО ТРУБОПРОВОДА, содержащее гидродомкраты управления, установленные между головной секцией и продавливаемым трубопроводом, два датчика и установленный в монтажной камере блок управления, включающий реверсивный счетчик, выход которого соединен с первым входом дешифратора, первый выход которого соединен с входом цифроаналогового преобразователя, регистратор и усилитель, отличающееся тем, что оно снабжено дополнительным датчиком и двумя реверсивными счетчиками, датчики установлены на головной секции продавливаемого трубопровода и выполнены в виде лазерных гироскопов, оси которых взаимно ортогональны, а ось одного из них параллельна продольной оси головной секции, выходы датчиков соединены с входами соответствующих реверсивных счетчиков, выходы второго и третьего реверсивных счетчиков соединены с вторым и третьим входами дешифратора, второй выход которого соединен с регистратором, выход цифроаналогового преобразователя соединен с входом усилителя, выходы которого соединены с входами соответствующих гидродомкратов управления.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для ОБРАЗОВАНИЯ СКВАЖИНШ МЕТОДОМ ПРОКОЛАИ?Л 5 til ИИ;-•-»-•- •''•^'-="-'\, . .,..- ,--rv ;-.;-р:гЛЯ' | 0 |
|
SU378605A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
