Изобретение относится к измерительной технике, в частности, к устройствам для наземного позиционирования трассы ферромагнитного трубопровода, расположенного под землей.
Известно устройство для определения расположения магистральных трубопроводов (Пат. РФ 1804636А3 кл. G 01 V 3/11, БИ N 11, 1993), используемое для обнаружения, определения местоположения и глубины залегания магистральных трубопроводов, состоящее из датчика магнитного поля, входного усилителя, фильтра, логарифмического усилителя, выпрямителя, стрелочного индикатора, корпуса с меткой и линией для ориентации. Недостатками этого устройства является низкая точность измерений из-за применения одного однокомпонентного датчика магнитного поля, ориентация и координаты которого определяются приблизительно; кроме того, для применения этого устройства необходимо пропускать по отыскиваемому трубопроводу ток определенной частоты, на которую настраивается фильтр устройства. Во время эксплуатации устройства оператор должен перемещаться вместе с устройством поперек оси трубопровода в различные точки пространства для определения глубины залегания трубопровода. При таком методе точность определения глубины низка, а эксплуатация неудобна.
Известно устройство для обнаружения разделителей или скребков в нефтепроводах (А.с. СССР 897324/29-14 кл. F 06 l 47 fl60 1964, БИ N 18, 1965 г.), выполненное с крестовиной в виде взаимноперпендикулярных штанг с установленными на их концах магниточувствительными элементами, каждая пара которых расположена на концах одной штанги, и в одну электрическую цепь включен по градиентометрической схеме индикатор, определяющий направление трубопровода, а в другую - индикатор, показывающий место нахождения разделителя или скребка. К недостаткам этого устройства относятся невозможность определения глубины залегания трубопровода и большие погрешности определения градиента магнитного поля из-за нарушения параллельности осей чувствительностей датчиков, расположенных на одной штанге, а также колебаний, возникающих при движении оператора с устройством. Эксплуатация этого устройства затруднена необходимостью перемещать крупногабаритную горизонтальную крестовину. Кроме того, оба устройства требуют дополнительных вычислений, производимых оператором по результатам измерения магнитного поля для определения численного значения глубины трубопровода и его координат.
Наиболее близкой по технической сущности к заявляемой системе является система для измерения смещения зарытого в землю трубопровода, т.е. система позиционирования трассы подземного трубопровода (Пат. США 4.727.329 кл. G 01 V 3/08. Изобретения стран мира, вып. 110, N 11, 1988). На движущемся транспортном средстве размещен датчик, регистрирующий напряженность магнитного поля в нескольких разнесенных друг от друга точках. Выходные сигналы регистрируются самописцем для определения точки максимальной напряженности магнитного поля на основании измерений, выполненных датчиком. Угол места транспортного средства относительно некоторой опорной точки измеряется устройством, определяющим любые изменения угла места земной поверхности непосредственно над проверяемой секцией трубопровода. На основе результатов измерений определяется расстояние по вертикали между датчиком и секцией трубопровода в точке, соответствующей максимуму напряженности магнитного поля. Недостатками этого устройства являются невозможность определения дальности до трубопровода на земной поверхности. Необходимо обязательно находиться над трубой, чтобы определять глубину ее залегания. Кроме того, система обладает большими массой и габаритами. Установка системы на транспортном средстве делает невозможным ее применение для многих участков трассы трубопроводов (например, в зонах слабых грунтов и т.д).
Задачей изобретения является снижение массы и габаритов системы для обеспечения возможности ее переноски и использования человеком-оператором, а также расширение функциональных возможностей за счет автоматизированного определения не только глубины залегания трубы, но и дальности оператора до нее, магнитного курса оператора и трубы, а также географических координат оператора и трассы трубопровода.
Поставленная задача решается тем, что в систему позиционирования трассы подземного трубопровода, состоящую из датчика напряженности магнитного поля с усилителем, системы обработки информации и устройства ориентации, дополнительно внесены немагнитная штанга, приемник спутниковой навигационной системы, бортовой компьютер с аналого-цифровым преобразователем и системой индикации, а также восемь датчиков напряженности магнитного поля так, что датчики напряженности магнитного поля в совокупности выполнены в виде трех трехкомпонентных магнитометров, укрепленных на жесткой немагнитной штанге, соединенной с корпусом, причем магнитометры разнесены вдоль ее оси, так что три триэдра измерительных осей параллельны соответственно друг другу и измерительным осям датчиков устройства ориентации, в качестве которого применена бесплатформенная инерциальная система, состоящая из трехкомпонентного блока измерителей кажущихся ускорений и трехкомпонентного блока гироскопических датчиков угловых скоростей, жестко установленных на корпусе, в качестве системы обработки информации использован бортовой компьютер с аналого-цифровым преобразователем и системой индикации, выходы трехкомпонентных магнитометров, а также выходы трехкомпонентного блока измерителей кажущегося ускорения и трехкомпонентного блока гироскопических датчиков угловых скоростей соединены со входами аналого-цифрового преобразователя, выходы которого соединены со входами бортового компьютера, к выходу которого присоединена система индикации, к порту бортового компьютера присоединен выход приемника спутниковой навигационной системы, элементы системы позиционирования прикреплены к общему корпусу, который имеет лямки для закрепления на человеке-операторе.
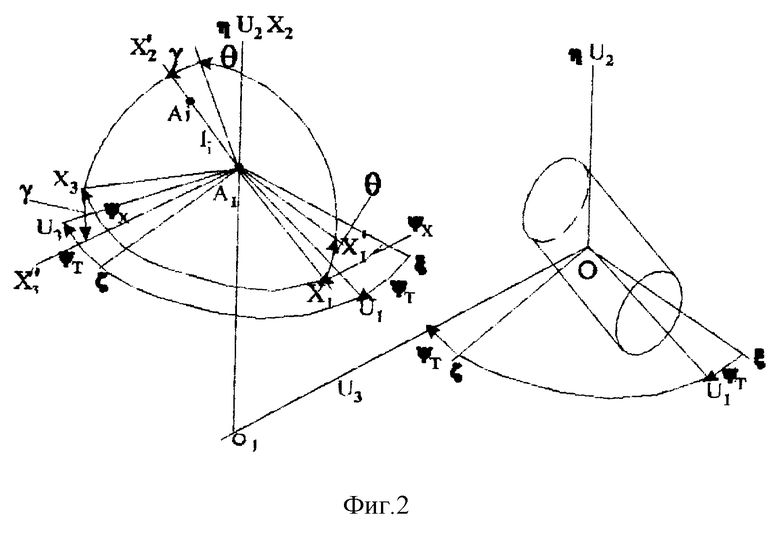
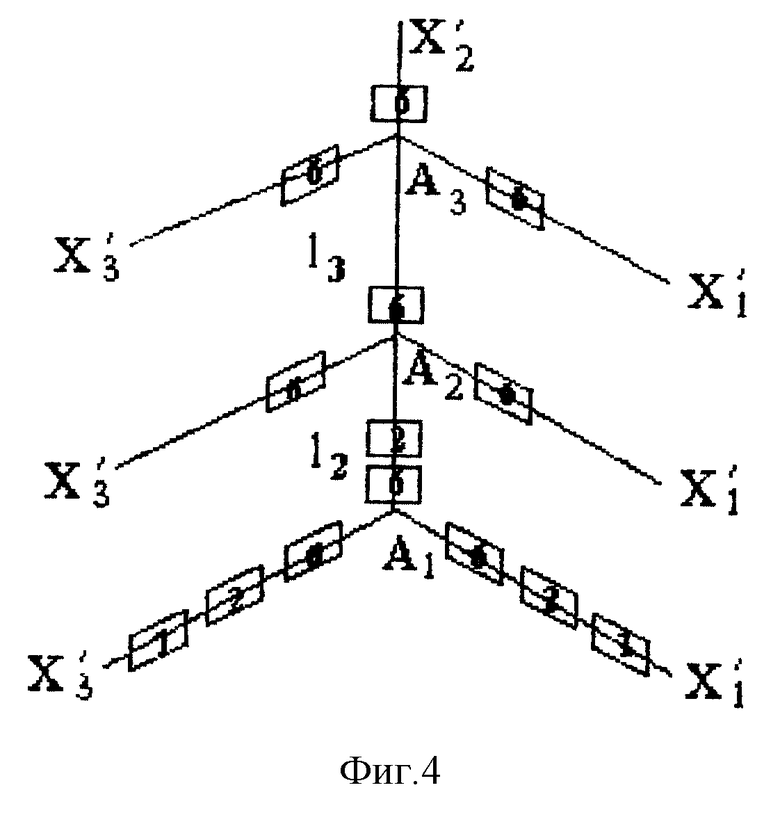
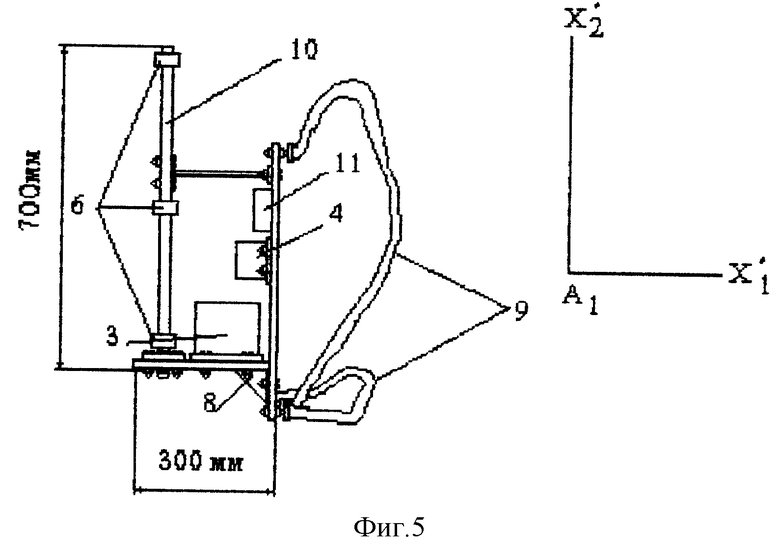
На фиг. 1 приведена функциональная схема системы позиционирования (СП) трассы подземного трубопровода; на фиг. 2 - схема поворотов корпуса и штанги с блоком акселерометров, блоком гироскопических датчиков угловой скорости (ДУС) и трехкомпонентных магнитометров (ТММ) в системе координат OU1U2U3, связанной с трубопроводом; на фиг. 3 - схема размещения системы позиционирования на операторе; на фиг. 4 - кинематическая схема блока акселерометров, блока ДУС и ТММ; на фиг. 5 - схема корпуса, к которому крепятся элементы СП.
Система позиционирования трассы подземного трубопровода включает в свой состав бесплатформенную инерциальную систему ориентации (БИСО), состоящую из трехкомпонентного гироскопического измерителя угловой скорости в виде блока ДУС 1, состоящего, например, из двух двухкомпонентных роторных вибрационных гироскопов РВГ-1М (угловая скорость дрейфа 10 град/ч) производства Арзамасского НПП "Темп-Авиа", и трехкомпонентного измерителя кажущегося ускорения в виде блока акселерометров 2, состоящего, например, из миниатюрных твердотельных акселерометров АК-5 (класс точности 10-3 м/с2) производства Арзамасского НПП "Темп-Авиа". Два двухкомпонентных гироскопических ДУС 1 и три акселерометра 2 устанавливаются на корпусе так, что их измерительные оси образуют параллельные триэдры, и вместе с аналоговой электроникой гироскопов, аппаратурой термостатирования образуют инерциальный блок (ИБ) 3. Через разъемы ИБ 3 подключается к источнику питания в виде аккумуляторной батареи 4, а выходы ИБ 3 соединены с входами многоканального аналого-цифрового преобразователя АЦП 5 (например, 16-канальная 16-разрядная плата АЦП PCL-816). ИБ 3 вырабатывает в виде напряжения постоянного тока сигналы трех составляющих угловой скорости ИБ в проекциях на оси системы координат A1 X'1 X'2 X'3 и трех составляющих линейного ускорения в проекциях на те же оси. С оператором, ИБ и корпусом, на котором закреплены ИБ и штанга с ТММ, а также первым ТММ связана правая ортогональная СК A1 X'1 X'2 X'3, причем ось А1, X'1 направлена вперед по движению оператора вдоль продольной оси, ось A1X'2 - по нормали оператора. Ось A1X'3 образует с первыми двумя ортогональную тройку осей и направлена вправо по движению оператора. В СП используются 9 магнитометров, например, магниторезистивных датчиков, собранных как три ТММ 6 и подключенных к источнику питания 4. ТММ 6 вырабатывают сигналы трех составляющих вектора магнитного поля в точках установки в проекциях на оси Аi X'1X'2X'3 (i = 1,2,3). Выходы ТММ 6 подключены к блоку усилителей 7 (состоящих, например, из операционных усилителей К 140 УД7), которые усиливают сигналы ТММ 6 для подачи на АЦП 5. Все элементы СП установлены на общем корпусе 8 (например, из алюминиевого сплава Д16), представляющем собой горизонтальную пластину для установки ИБ, которая жестко соединена с вертикальным каркасом, прилегающем к спине оператора и с помощью лямок 9 крепящемся к оператору. ТММ 6 жестко установлены на немагнитной штанге 10 (выполненной, например, из алюминиевого сплава Д16), так что их измерительные оси образуют параллельные друг другу ортогональные трехгранники, причем штанга 10 жестко соединена с корпусом 8. В состав СП входит также бортовой компьютер (БК) 11 со встроенным источником питания и дисплеем. Кроме того, на руке оператора закрепляется дублирующая система индикации (ЖКИ) 12 (выполненная, например, на полупроводниковых знаковых индикаторах АЛС 340А, коммутация сегментов которых обеспечивается с помощью дешифраторов, например на микросхемах К155ИД1). Вход ЖКИ 12 подключен к выходу БК 11 (например, параллельному порту Centronix). ЖКИ 12 осуществляет вывод текущих параметров (магнитный курс оператора и трубы, дальность и глубина залегания трубопровода относительно оператора). К порту (например, последовательному RS-232) БК 11 подключен выход приемника спутниковой навигационной системы (СНС) 13. (Это, например, приемник GPS/ГЛОНАСС в виде электронной платы GG24 фирмы Ashtech). Выходы АЦП 5 подключены ко входам БК 11. В качестве БК 11 используется компьютер блокнотного или карманного классов, имеющий систему ввода информации и систему индикации 12 (клавиатуру, ЖК-дисплей), достаточные быстродействие и системные ресурсы, собственный источник питания. Например, типа Casio Cassiopeia (175х89х25 мм, 391 г, 2 батареи АА, время работы 15-30 ч, 2 Мбайт ОЗУ, порт RS-232, разъем PC-карты, ЖК-экран размера 114x64 мм) или NEC Mobile Pro 750 C (250x127x38 мм, 900 г, литиево-ионные батареи, время работы 7-9 ч, 16 Мбайт ОЗУ, разъем PC-карты, разъем флэш-памяти, экран 206 мм по диагонали).
Предлагаемая система работает следующим образом. При движении оператора с блока ДУС 1 в виде напряжений постоянного тока на АЦП 5 поступают сигналы  соответствующие оценкам угловых скоростей в проекциях на оси системы координат, связанной с основанием СП. Эти сигналы преобразуются АЦП 5 из аналоговой в цифровую форму и используются в реализуемых БК 11 алгоритмах БИ- CO:
соответствующие оценкам угловых скоростей в проекциях на оси системы координат, связанной с основанием СП. Эти сигналы преобразуются АЦП 5 из аналоговой в цифровую форму и используются в реализуемых БК 11 алгоритмах БИ- CO:

где
причем Kθ, Kγ, Kψ, K - оценка магнитного курса, определяемая по приведенным ниже формулам (5)-(6) в геомагнитной системе координат Oξηξ, где ось Oξ направлена на магнитный Север, Oη - по вертикали места. После первого поворота оператора относительно Oξηξ имеем СК A1X1X2X3, где поворот оси A1X1 на угол ψx относительно направления на Север (вокруг оси OU2) характеризует магнитный курс оператора. С трубопроводом связана правая ортогональная система координат OU1U2U3, где ось OU1 совпадает с осью трубы, ось OU2 направлена вертикально вверх.
- оценка магнитного курса, определяемая по приведенным ниже формулам (5)-(6) в геомагнитной системе координат Oξηξ, где ось Oξ направлена на магнитный Север, Oη - по вертикали места. После первого поворота оператора относительно Oξηξ имеем СК A1X1X2X3, где поворот оси A1X1 на угол ψx относительно направления на Север (вокруг оси OU2) характеризует магнитный курс оператора. С трубопроводом связана правая ортогональная система координат OU1U2U3, где ось OU1 совпадает с осью трубы, ось OU2 направлена вертикально вверх.
С блока акселерометров 2 измерителя кажущегося ускорения в виде напряжений постоянного тока на АЦП 5 поступают сигналы  соответствующие оценкам линейных ускорений в проекциях на те же оси. Преобразованные АЦП 5 в цифровую форму эти величины согласно выражениям (2) используются как корректирующие члены в алгоритмах (1). С трех ТММ 6 через БЭ 7 в виде напряжений постоянного тока на АЦП 5 поступают сигналы
соответствующие оценкам линейных ускорений в проекциях на те же оси. Преобразованные АЦП 5 в цифровую форму эти величины согласно выражениям (2) используются как корректирующие члены в алгоритмах (1). С трех ТММ 6 через БЭ 7 в виде напряжений постоянного тока на АЦП 5 поступают сигналы  соответствующие оценкам компонентов вектора напряженности магнитного поля в проекциях на оси системы координат, связанной с основанием СП в точках установки ТММ. Эти величины, преобразованные АЦП 5 в цифровую форму, пересчитываются в БК 11 по формуле (3) с использованием информации о крене и тангаже штанги 10 с ТММ 6 вычисленной БИСО:
соответствующие оценкам компонентов вектора напряженности магнитного поля в проекциях на оси системы координат, связанной с основанием СП в точках установки ТММ. Эти величины, преобразованные АЦП 5 в цифровую форму, пересчитываются в БК 11 по формуле (3) с использованием информации о крене и тангаже штанги 10 с ТММ 6 вычисленной БИСО:
где  - матрицы направляющих косинусов оценок соответствующих углов.
- матрицы направляющих косинусов оценок соответствующих углов.
В алгоритмы (1) вводится член азимутальной коррекции, значения которого вычисляются бортовым компьютером по приведенным ниже алгоритмам (5)-(6).
Для определения оценки угла  в БК используются следующие соотношения:
в БК используются следующие соотношения:
Оценка угла магнитного курса оператора  определяется как решение нелинейного уравнения с помощью интераций по формуле
определяется как решение нелинейного уравнения с помощью интераций по формуле
где

Для определения  используются соотношения
используются соотношения (7)
(7)
где
 - полная напряженность МПТ в точках установки ТММ,
- полная напряженность МПТ в точках установки ТММ, - оценки направляющих косинусов соответствующих поворотов,
- оценки направляющих косинусов соответствующих поворотов,
l2, l3 - расстояния между ТММ, - коэффициент, характеризующий магнитные свойства трубы.
- коэффициент, характеризующий магнитные свойства трубы.
Полученные по выражению (3) значения используются для вычисления оценок магнитного курса ПО  и трубопровода
и трубопровода  , глубины залегания и дальности трубы
, глубины залегания и дальности трубы  по алгоритмам (4)-(9). Эти значения, вычисленные БК 11, выводятся на ЖКИ 12. Составляющие магнитного поля Земли TξTη, а также значения магнитного склонения вдоль трассы трубопровода, занесены в память БК 11 с внешнего источника (магнитный или оптический диск) или с клавиатуры в виде локально кодированных бинарных карт (Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. М.: Сов. радио, 1974.- 392 с.) на основе модели международного аналитического поля Магсат, AWC, IGS. Необходимые для вычислений начальные значения географических координат оператора ξ
по алгоритмам (4)-(9). Эти значения, вычисленные БК 11, выводятся на ЖКИ 12. Составляющие магнитного поля Земли TξTη, а также значения магнитного склонения вдоль трассы трубопровода, занесены в память БК 11 с внешнего источника (магнитный или оптический диск) или с клавиатуры в виде локально кодированных бинарных карт (Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. М.: Сов. радио, 1974.- 392 с.) на основе модели международного аналитического поля Магсат, AWC, IGS. Необходимые для вычислений начальные значения географических координат оператора ξ
 (10)
(10)
Точность позиционирования трассы трубопровода при этом в основном зависит от точности определения координат оператора. Для проверки целесообразности использования системы позиционирования проводилось математическое моделирование ее работы на ЭВМ с учетом погрешностей датчиков (погрешности ДУС 5 град/ч, акселерометров 3•10-3 м/с2, ТММ 10 нТл). Моделирование проводилось при значениях Tξ= 30000 нТл, Tη= -50000 нТл, Fk = 200000 нТлм2, ε = 0,25 рад. По результатам математического моделирования дальность (≈ 5 м) и глубина (≈ 3 м) трубопровода относительно оператора определяется с погрешностью 10 - 20 см. Известно при этом, что погрешность определения координат оператора с помощью СНС, при работе ее в дифференциальном режиме, составляет единицы метров (СКО 1-4,5 м).
Вычисленные при позиционировании участка трубопровода значения географических координат трубопровода ξ Эти величины в любой момент как во время позиционирования, так и после него, могут быть выведены на встроенный дисплей БК 11 для анализа и проверки результатов работы системы позиционирования.
Эти величины в любой момент как во время позиционирования, так и после него, могут быть выведены на встроенный дисплей БК 11 для анализа и проверки результатов работы системы позиционирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1998 |
|
RU2156440C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1996 |
|
RU2108546C1 |
| СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ В СТЕНКАХ ВНУТРИ ТРУБОПРОВОДА | 1999 |
|
RU2172488C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ПРОДОЛЬНОЙ ОСИ ТРУБОПРОВОДА | 2001 |
|
RU2213324C2 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2002 |
|
RU2207512C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |

Использование: измерительная техника, в частности устройства для наземного позиционирования трассы ферромагнитного трубопровода, расположенного под землей. Сущность: система позиционирования трассы подземного трубопровода содержит немагнитную штангу, приемник спутниковой навигационной системы, бортовой компьютер с аналого-цифровым преобразователем и системой индикации, а также восемь датчиков напряженности магнитного поля. При этом датчики напряженности магнитного поля в совокупности выполнены в виде трех трехкомпонентных магнитометров, укрепленных на жесткой немагнитной штанге, соединенной с корпусом. Магнитометры разнесены вдоль ее оси, так что три триэдра измерительных осей параллельны соответственно друг другу и измерительным осям датчиков устройства ориентации, в качестве которого применена бесплатформенная инерциальная система, состоящая из трехкомпонентного блока измерителей кажущихся ускорений и трехкомпонентного блока гироскопических датчиков угловых скоростей, жестко установленных на корпусе. В качестве системы обработки информации использован бортовой компьютер с аналого-цифровым преобразователем и системой индикации. Выходы трехкомпонентных магнитометров, а также выходы трехкомпонентного блока измерителей кажущегося ускорения и трехкомпонентного блока гироскопических датчиков угловых скоростей соединены со входами аналого-цифрового преобразователя, выходы которого соединены со входами бортового компьютера, к выходу которого присоединена система индикации. К порту бортового компьютера присоединен выход приемника спутниковой навигационной системы. Элементы системы позиционирования прикреплены к общему корпусу, который имеет лямки для закрепления на человеке-операторе. Технический результат: расширение функциональных возможностей, снижение массы и габаритов. 5 ил. /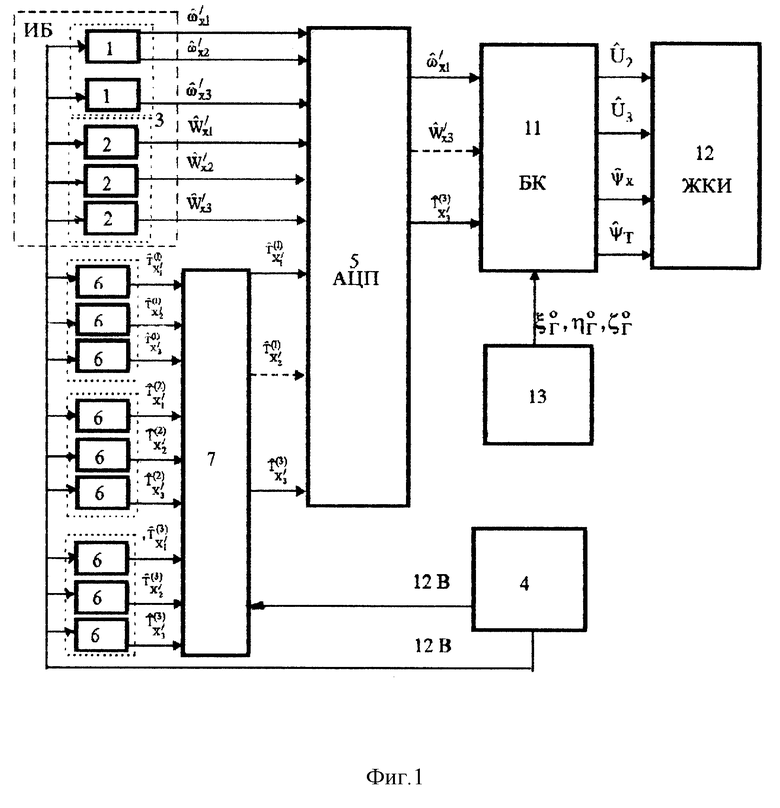
Система позиционирования трассы подземного трубопровода, состоящая из датчика напряженности магнитного поля с усилителем, системы обработки информации и устройства ориентации, отличающаяся тем, что в нее дополнительно внесены немагнитная штанга, приемник спутниковой навигационной системы, бортовой компьютер с аналого-цифровым преобразователем и системой индикации, а также восемь датчиков напряженности магнитного поля так, что датчики напряженности магнитного поля в совокупности выполнены в виде трех трехкомпонентных магнитометров, укрепленных на жесткой немагнитной штанге, соединенной с корпусом, причем магнитометры разнесены вдоль ее оси, так что три триэдра измерительных осей параллельны соответственно друг другу и измерительным осям датчиков устройства ориентации, в качестве которого применена бесплатформенная инерциальная система, состоящая из трехкомпонентного блока измерителей кажущихся ускорений и трехкомпонентного блока гироскопических датчиков угловых скоростей, жестко установленных на корпусе, в качестве системы обработки информации использован бортовой компьютер с аналого-цифровым преобразователем и системой индикации, выходы трехкомпонентных магнитометров, а также выходы трехкомпонентного блока измерителей кажущегося ускорения и трехкомпонентного блока гироскопических датчиков угловых скоростей соединены со входами аналого-цифрового преобразователя, выходы которого соединены со входами бортового компьютера, к выходу которого присоединена система индикации, к порту бортового компьютера присоединен выход приемника спутниковой навигационной системы, элементы системы позиционирования прикреплены к общему корпусу, который имеет лямки для закрепления на человеке-операторе.
| US 4727329 A, 23.02.1988 | |||
| ГЕНЕРАТОР ИМПУЛЬСОВ ИСКАТЕЛЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 1987 |
|
SU1436677A1 |
| US 4529937 A, 16.07.1985 | |||
| Устройство для нанесения филенки | 1971 |
|
SU468809A1 |
| DE 3305208 A1, 16,08.1984. | |||
