Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано для построения систем коррекции гировертикалей.
Существуют схемы гировертикалей с радиальной коррекцией, например, авиагоризонт АГД-1 (Фридлендер Г.О., Козлов М.С. Авиационные гироскопические приборы. М. : Оборонгиз, 1961), в котором устройство коррекции содержит двухкоординатный маятниковый чувствительный элемент в виде электролитического уровня, асинхронные двухфазные коррекционные моторы, подключенные к маятниковому чувствительному элементу, и выключатели коррекции, причем, выключатель продольной коррекции представляет жидкостный акселерометр, установленный на гироузле, а выключатель поперечной коррекции - гироскопический датчик осредненной угловой скорости виража типа ВК-53РБ, представляющий отдельный прибор. Недостатком таких схем гировертикалей является значительная статическая ошибка от моментов сил сухого трения в осях подвеса и токоподводах.
Известны различные схемные и конструктивные варианты построения гироприборов с трехколечными шарикоподшипниками (ТШП) и вращающимися коллекторными токоподводами (ВКТ), которые применяются для осреднения моментов сил сухого трения в опорах подвеса курсовертикалей, гирополукомпасов, гировертикалей и других приборов, устанавливаемых на различных подвижных объектах, например, в серийной курсовертикали КВ-2НМ (Система курсовертикали типа СКВ-2Н. Руководство по эксплуатации и техническому обслуживанию. М., Машиностроение, 1975, стр.61).
Так как на основе прототипа будет построено устройство коррекции гировертикали повышенной точности, то при общей характеристике прототипа опишем только те узлы, которые используются для формирования рассматриваемых свойств.
Канал вертикали курсовертикали КВ-2НМ состоит из трехстепенного астатического гироскопа с вертикальной осью собственного вращения, снабженного узлами продольной и поперечной коррекции, которые содержат маятниковые чувствительные элементы, расположенные на гироузле и наружной раме, электрически соединенные с коррекционными моторами, кинематически связанные с осями подвеса наружной рамы и гироузла соответственно. Гироузел, который представляет собой гирокожух с установленным в нем гиромотором, своими полуосями кинематически связан с двумя узлами ВКТ и внутренними кольцами двух ТШП, наружные кольца которых установлены в наружной раме, а средние кольца связаны с приводными двигателями, подключенными к блоку реверса. Аналогично, наружняя рама своими полуосями кинематически связана с двумя узлами ВКТ и внутренними кольцами двух ТШП, средние кольца которых связаны с приводными двигателями, которые подключены к блоку реверса, периодически реверсирующего направление вращения приводных двигателей, т.е. вращающихся коллекторов узлов ВКТ и средних колец ТШП, что приводит к осреднению момента сил сухого трения в осях подвеса гироузла и наружной рамы, а, следовательно, к уменьшению систематической составляющей дрейфа гироскопа (и соответственно статической погрешности гировертикали). Для компенсации ухода оси гироскопа от вертикали, вызванного облетом и вращением Земли, предназначено вычислительное устройство, на вход которого подключены выходы датчика путевой скорости, курсовой системы и датчика широты, управляющие сигналы с которого поступают на коррекционные моторы. С целью уменьшения влияния поперечных ускорений (при вираже) на точность работы канала вертикали курсовертикали и уменьшения послевиражных погрешностей к КВ-2НМ подключен выключатель поперечной коррекции (например, ВК-53РБ или ВК-90), а для уменьшения погрешностей от продольных ускорений курсовертикаль КВ-2НМ содержит выключатель продольной коррекции (например, два последовательно включенных и установленных наклонно жидкостных акселерометра, расположенных на карданной раме гироскопа вертикали).
Задачей изобретения является повышение точности работы гировертикали при определенных условиях полета за счет использования моментов сил сухого трения трехколечных шарикоподшипников и вращающихся коллекторных токоподводов для коррекции гировертикали.
Поставленная задача достигается тем, что устройство коррекции гировертикали, содержащей трехстепенной гироскоп с вертикальной осью гиромотора, установленного в гироузле, который своими полуосями установлен во внутренних кольцах первого, второго трехколечных шарикоподшипников, средние кольца которых кинематически связаны с вращающимися коллекторами первого, второго узлов вращающихся коллекторных токоподводов и с первым, вторым приводными двигателями, которые как и внешние кольца первого, второго трехколечных шарикоподшипников закреплены на наружной раме, которая своими полуосями установлена во внутренних кольцах третьего, четвертого трехколечных шарикоподшипников, средние кольца которых кинематически связаны с вращающимися коллекторами третьего, четвертого узлов вращающихся коллекторных токоподводов и с третьим, четвертым приводными двигателями, которые как и внешние кольца третьего, четвертого трехколечных шарикоподшипников закреплены на следящей раме, узлы продольной и поперечной коррекции, состоящие из первого, второго маятниковых чувствительных элементов, установленных на наружной раме и гироузле и соединенных с первым, вторым усилителями- преобразователями соответственно, первый, второй коррекционные моторы, имеющие по два входа, блок реверса, включающее выключатели продольной и поперечной коррекции, вычислительное устройство, входами которого являются входы по путевой скорости, широте и курсу, а выходы подключены к первым входам первого и второго коррекционных моторов, задатчик ускоренного восстановления, введены три управляемых коммутатора, имеющие первый, второй, третий управляющие входы и первый, второй выходы, причем, первый, второй, третий управляющие входы первого коммутатора соответственно подключены к выходам первого усилителя-преобразователя, блока реверса, выключателя продольной коррекции, а первый, второй выходы соответственно соединены с первым, вторым приводными двигателями; первый, второй, третий управляющие входы второго коммутатора соответственно подключены к выходам второго усилителя-преобразователя, блока реверса, выключателя поперечной коррекции, а первый, второй выходы соответственно соединены с третьим, четвертым приводными двигателями; первый, второй, третий управляющие входы третьего коммутатора соответственно подключены к выходам первого, второго усилителей-преобразователей и задатчику ускоренного восстановления, а первый, второй выходы соответственно соединены со вторыми входами первого, второго коррекционных моторов.
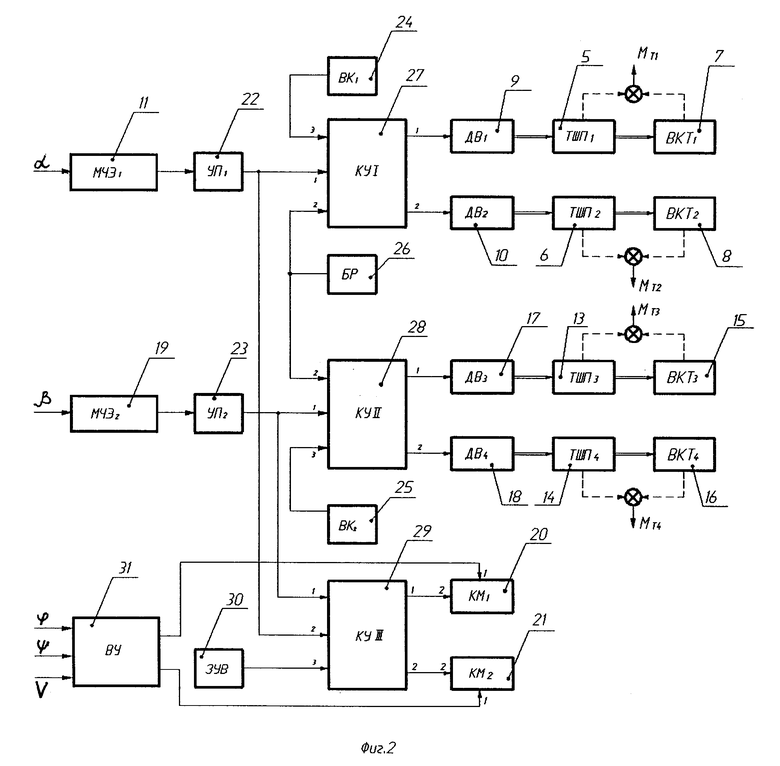
Сущность изобретения поясняется двумя чертежами. На фиг.1 представлена кинематическая схема гировертикали, на фиг.2 - блок-схема устройства коррекции гировертикали.
На фиг.1, 2 приняты следующие обозначения:
1 - гироузел, который представляет собой гирокожух с установленным в нем гиромотором с вертикальной осью собственного вращения и кинетическим моментом H;
2 - наружная рама, которая установлена в следящей раме;
3 - следящая рама;
4 - полуоси гироузла;
5, 6 - трехколечные шарикоподшипники оси подвеса гироузла (имеющие в формуле изобретения названия первый и второй ТШП), причем, 6.1 - внутреннее кольцо, 6.2 - среднее кольцо, 6.3 - наружное кольцо ТШП;
7, 8 - узлы ВКТ гироузла (в формуле изобретения первый, второй узел ВКТ), каждый узел ВКТ включает 7.1 - неподвижный щеточный узел, 7.2 - вращающийся коллектор, который кинематически связан со средним кольцом ТШП, 7.3 - внутренний коллектор, который жестко связан с соответствующими полуосями, причем, при вращении коллектора 7.2 создается сила трения между щетками вращающегося коллектора и внутренним коллектором, вследствие чего по оси подвеса гироузла будет возникать момент сил сухого трения вращающихся коллекторных токоподводов, конструктивно схема узлов 7, 8 выполнена так, что число щеток по каждой полуоси гироузла одинаково;
9, 10 - приводные двигатели (в формуле изобретения имеют названия первый, второй приводные двигатели и представляют либо двухфазные индукционные двигатели с полым ротором серии ДИД или ДМ, либо двигатели с катящимся ротором) трехколечных шарикоподшипников 5, 6 и узлов ВКТ 7, 8;
11 - маятниковый чувствительный элемент (МЧЭ) продольной коррекции, например ДЖМ-9Б (первый МЧЭ);
12 - полуоси наружной рамы;
13, 14 - ТШП оси подвеса наружной рамы (третий, четвертый ТШП);
15, 16 - узлы вращающихся коллекторных токоподводов наружной рамы выполнены аналогично узлам 7, 8 (третий, четвертый узлы ВКТ);
17, 18 - приводные двигатели ТШП 13, 14 и узлов ВКТ 15, 16 (третий, четвертый приводные двигатели);
19 - МЧЭ поперечной коррекции (второй МЧЭ);
20, 21 - первый, второй коррекционные моторы, установленные соответственно по осям подвеса гироузла и наружной рамы;
22, 23 - усилители-преобразователи продольной и поперечной коррекции, соответственно, вырабатывающие сигналы уровней логической "1" или "0": при отклонении главной оси гироскопа на угол α от вертикали на усилитель-преобразователь 22 с МЧЭ 11 поступает сигнал переменного тока, на выходе усилителя- преобразователя при α > 0 будет сигнал уровня логической "1", при α < 0 - сигнал уровня логического "0", аналогичным образом вырабатываются сигналы при отклонении главной оси гироскопа на угол β;
24, 25 - выключатели узлов продольной и поперечной коррекции, которые в зависимости от величин продольного ускорения и угловой скорости виража соответственно вырабатывают сигналы логической "1" или "0", при этом:
если |a| ≥ amin и время действия ускорения больше времени задержки отключения коррекции, то на выходе выключателя коррекции (ВК) 24 установится логическая "1",
если |a| < amin, то на выходе ВК 24 установится логический "0", где a - продольное ускорение летательного аппарата, amin - допустимое значение продольного ускорения, при котором происходит отключение продольной коррекции,
если |ωв| ≥ ωmin и время действия угловой скорости виража больше времени задержки отключения коррекции, то на выходе ВК 25 установится логическая "1",
если |ωв| < ωmin, то на выходе ВК 25 установится сигнал уровня логического "0", где ωв - угловая скорость виража летательного аппарата, ωmin - допустимое значение угловой скорости виража, при которой происходит отключение поперечной коррекции;
26 - блок реверса, вырабатывающий управляющие сигналы с периодом реверса, которые, если необходимо, приводятся к уровню логического "0" или "1" и служат для управления вращением приводными двигателями;
27, 28, 29 - первый, второй, третий управляемые коммутаторы, представляющие собой комбинационные схемы, выходные сигналы первого и второго коммутаторов являются управляющими сигналами первого, второго и третьего, четвертого приводных двигателей соответственно; если приводные двигатели постоянного тока, то выходные сигналы коммутирующих устройств постоянного тока, если приводные двигатели переменного тока типа ДИД-0.1 (0.5), то управляющими сигналами являются фазы трехфазного питания; выходными сигналами третьего коммутатора являются сигналы соответствующих маятниковых чувствительных элементов 11, 19 в режиме ускоренной выставки, которые подаются на соответствующие коррекционные моторы 20, 21 по сигналу задатчика ускоренного восстановления.
Логику работы коммутирующих устройств рассмотрим на примере коммутирующего устройства 27, т.е. рассмотрим канал продольной коррекции. При отклонении главной оси гироскопа на угол α > 0, на первом входе коммутатора установится логическая "1" и, если продольное ускорение летательного аппарата не превышает заданного допустимого значения, при котором происходит отключение коррекции, то на третьем входе коммутирующего устройства установится логический "0", в этом случае сигнал блока реверса не влияет на выход коммутирующего устройства, приводные двигатели 9, 10 будут вращаться в одну сторону (в зависимости от знака угла α ) с угловыми скоростями ωк1 и ωк2, создавая однонаправленные моменты сил сухого трения Mт1 и Mт2 в ТШП 5, 6 и узлах ВКТ 7, 8, которые являются одной из составляющих корректирующих моментов и возвращают главную ось гироскопа в сторону вертикали. В случае, когда продольное ускорение летательного аппарата превышает допустимое значение и время действия ускорения больше времени задержки, то на третьем входе коммутирующего устройства 27 установится логическая "1", а сигнал с блока реверса является определяющим, и коммутирующее устройство пропускает сигнал с блока реверса на приводные двигатели 9 и 10, которые реверсируют направление своего вращения с периодом, заданным блоком реверса. При отклонении главной оси гироскопа от вертикали на угол β, коммутирующее устройство 28 работает аналогично.
30 - задатчик ускоренного восстановления вырабатывает сигнал, приведенный к уровню логического "0" или "1", который при запуске гировертикали поступает на коммутатор 29 в виде, например, логической "1", и по сигналам с усилителей-преобразователей 22, 23 соответствующие коррекционные моторы 20, 21 осуществляют ускоренное приведение гироскопа к вертикали.
31 - вычислительное устройство, формирующее сигналы U1 и U2 для компенсации вращения вертикали за счет вращения и облета Земли:
при этом коррекционные моторы 20, 21 создают корректирующие моменты
Mкм1=HU2,
Mкм2=HU1,
которые обеспечивают прецессию главной оси гироскопа с угловыми скоростями U1 и U2, где U - угловая скорость вращения Земли; ϕ - широта местоположения летательного аппарата; ψ - курс летательного аппарата; v - путевая скорость; R - радиус Земли.
На фиг. 1 также показаны:
OXgYgZg - горизонтальная система координат;
α - угол отклонения главной оси гироскопа от местной вертикали относительно оси OZg;
β - угол отклонения главной оси гироскопа от местной вертикали относительно оси OXg;
Mк1, Mк2 - суммарные моменты продольной и поперечной коррекции;
Mт1 - суммарный момент сил сухого трения в трехколечном шарикоподшипнике 5 и узле вращающихся коллекторных токоподводов 7;
Mт2 - суммарный момент трения в ТШП 6 и узле ВКТ 8;
Mт3 - суммарный момент трения в ТШП 13 и узле ВКТ 15;
Mт4 - суммарный момент трения в ТШП 14 и узле ВКТ 16 (направление моментов на фиг.1 показано для случая, когда углы α > 0 и β > 0),
ωк1 - угловая скорость вращения среднего кольца ТШП 5 и узла ВКТ 7;
ωк2 - угловая скорость вращения среднего кольца ТШП 6 и узла ВКТ 8;
ωк3 - угловая скорость вращения среднего кольца ТШП 13 и узла ВКТ 15;
ωк4 - угловая скорость вращения среднего кольца ТШП 14 и узла ВКТ 16.
Изложение работы устройства и решения поставленной задачи построено на описании характерных режимов работы гировертикали с анализом погрешностей.
Погрешности гировертикали с радиальной коррекцией по каждой оси подвеса имеют следующие компоненты (ниже приведены погрешности относительно оси OZg):
αy = αy1+αy2+αy3,
где αy - установившееся значение угла отклонения главной оси гироскопа от вертикали (статическая ошибка);
αy1 - статическая ошибка, обусловленная вращением вертикали за счет вращения и облета Земли, которая компенсируется моментами коррекционных моторов 20, 21;
αy2 - статическая ошибка, вызванная суммарным трением в опорах подвеса гироузла, которая значительно уменьшается в рассматриваемой гировертикали в силу того, что моменты трения используются как коррекционные моменты (в некоторых режимах работы гировертикали реверсируется направление вращения средних колец трехколечных шарикоподшипников и узлов вращающихся коллекторных токоподводов, что приводит к осреднению суммарных моментов трения в опорах подвеса гироузла);
αy3 - статическая ошибка, обусловленная вредными моментами, например, моментом небаланса.
Так как моменты Mкм1 и Mкм2, создаваемые коррекционными моторами 20 и 21, действуют во всех режимах, то при описании работы устройства будут рассматриваться особенности формирования управляющих сигналов приводными двигателями, направление вращения которых определяет направление моментов сил сухого трения в соответствующих ТШП и ВКТ.
Режим 1. "Прямолинейный полет" с постоянной скоростью.
В режиме "Прямолинейного полета" продольная и поперечная коррекции осуществляются с помощью моментов сил сухого трения трехколечных шарикоподшипников 5, 6 и 13, 14, узлов вращающихся коллекторных токоподводов 7, 8 и 15, 16 и моментов коррекционных моторов 20, 21.
Рассмотрим режим "Прямолинейного полета" на примере продольной коррекции. При отклонении главной оси гироскопа от вертикали на угол α > 0 на первом входе управляемого коммутатора (КУ) 27 установится логическая "1"; в случае, если угол α < 0, то на первом входе коммутатора 27 установится сигнал уровня логического "0". Уровень сигнала на втором входе КУ 27 определяется значением продольного ускорения летательного аппарата, которое в режиме "Прямолинейного полета" не превышает значения, при котором происходит отключение коррекции. Поэтому на втором входе КУ установится сигнал уровня логический "0". При таком сочетании сигналов, сигнал с блока реверса не влияет на выходные сигналы КУ. По уровню сигналов на первом и втором входах КУ 27, на его выходе формируются управляющие сигналы, по которым приводные двигатели 9, 10 приводятся во вращение в одну сторону, следовательно, средние кольца ТШП 5, 6 и узлы ВКТ 7, 8 вращаются в одном направлении с угловыми скоростями ωк1 и ωк2, создавая однонаправленные моменты сил сухого трения Mт1 и Mт2, которые являются корректирующими, соответствующие коррекции релейного типа, и обеспечивают прецессию оси гироскопа в сторону вертикали.
Момент продольной коррекции: Mк1=Mкм1+Mт12, где Mкм1 - момент коррекционного мотора 20; Mт12 = -Mт1sign(ωк1+ωx)-Mт2sign(ωк2+ωx) - момент сил сухого трения в первом и втором ТШП и в первом, втором узлах ВКТ, где ωк1 = ωк2 = ωкsign(-α), ωк - угловая скорость вращения среднего кольца ТШП, ωx - угловая скорость летательного аппарата относительно оси OXg, причем ωк выбирают таким образом, чтобы |ωк| > ωx, т.е. только значение ωк определяет знак моментов трения Мт1 и Мт2. Поэтому при дальнейшем описании работы устройства пренебрегаем значением ωx, т.е
где ωк1 = ωк2 = ωкsign(-α).
Аналогичным образом функционирует поперечная коррекция: при отклонении главной оси гироскопа от вертикали на угол β, коммутирующее устройство 28 по уровню сигналов на первом и втором входах формирует управляющие сигналы, по которым приводные двигатели 17, 18 приводятся во вращение в одну сторону, следовательно, средние кольца ТШП 13, 14 и узлы ВКТ 15, 16 вращаются в одном направлении с угловыми скоростями ωк3 и ωк4, создавая однонаправленные моменты сил сухого трения Mт3, Mт4, которые являются корректирующими и обеспечивают прецессию гироскопа в сторону вертикали.
Момент поперечной коррекции: Mк2=Mкм2+Mт34, где Mк2 - момент коррекционного мотора 21; Mт34 = -Mт3sign(ωк3+ωz)-Mт4sign(ωк4+ωz) - момент сил сухого трения в третьем и четвертом ТШП и в третьем и четвертом узлах ВКТ; угловая скорость летательного аппарата относительно оси OZg. Аналогично, в дальнейшем пренебрегаем значением ωz. Поэтому
угловая скорость летательного аппарата относительно оси OZg. Аналогично, в дальнейшем пренебрегаем значением ωz. Поэтому
Режим 2. "Правильный вираж".
При выполнении летательным аппаратом (ЛА) разворотов в горизонтальной плоскости с постоянными угловыми скоростями виража, на маятниковый чувствительный элемент действует инерционная сила, обусловленная центростремительным ускорением, отклоняющая его к положению ложной вертикали. Так как эти маневры происходят в течение достаточно длительного промежутка времени, то маятниковый чувствительный элемент через систему коррекции успевает значительно отклонить ось гироскопа от вертикали. Поэтому для уменьшения погрешностей, возникающих вследствие действия ускорений, производят отключение поперечной коррекции на время виража.
Рассмотрим работу поперечного канала коррекции. На первом входе КУ 28 в зависимости от знака угла β отклонения главной оси гироскопа от вертикали формируется сигнал уровня логического "0" или "1". Если значение угловой скорости виража ЛА превышает пороговое значение и время действия угловой скорости виража больше времени задержки отключения коррекции, то на выходе ВК 25 установится логическая "1", и КУ 28 подключит на свои выходы сигнал блока реверса 26, приведенный к уровню управляющих сигналов приводными двигателями 17 и 18 (например, выдаст соответствующие фазы трехфазного напряжения). При этом направление вращения приводных двигателей 17, 18, и следовательно, средних колец ТШП 13, 14 и узлов ВКТ 15, 16 периодически реверсируется, что приводит к осреднению моментов сил сухого трения в оси подвеса наружной рамы и, как следствие, к уменьшению систематической составляющей дрейфа гироскопа и ухода оси ротора гироскопа от вертикали. Остаточный момент сил сухого трения ΔMт34 при реверсировании вращения средних колец ТПШ 13, 14 и узлов ВКТ 15, 16 будет определяться соотношением 
- угловые скорости, задаваемые блоком реверса, причем,
первые полпериода реверса ωp3 > 0, ωp4 < 0;
вторые полпериода реверса ωp4 < 0, ωp3 > 0,
а период реверса может быть либо фиксированной величиной, либо формироваться в зависимости от предполагаемого времени виража.
Продольная коррекция работает аналогично режиму 1, создается момент коррекции 
Режим 3. "Продольный маневр".
При движении летательного аппарата (ЛА) с продольными ускорениями, на маятниковый чувствительный элемент действуют инерционные силы, отклоняющие его к положению ложной вертикали. Так как эти ускорения действуют в течение достаточно длительного промежутка времени, то система коррекции успевает значительно отклонить ось гироскопа от вертикали. Поэтому для уменьшения погрешностей, возникающих вследствие действия продольных ускорений, производят отключение продольной коррекции.
Рассмотрим работу продольного канала коррекции. На первом входе КУ 27 в зависимости от знака угла α отклонения главной оси гироскопа от вертикали формируется сигнал уровня логического "0" или "1". Если значение продольного ускорения ЛА превышает пороговое значение и время действия ускорения больше времени задержки отключения коррекции, то на выходе ВК 24 установится логическая "1", и КУ 27 отключит цепь коррекции от МЧЭ 11. В этом случае сигнал блока реверса 26 является определяющим, поступает на выход КУ 27 и периодически реверсирует направление вращения приводных двигателей 9, 10 и, следовательно, средних колец ТШП 5, 6 и узлов ВКТ 7, 8, что приводит к осреднению моментов сил сухого трения в оси подвеса наружной рамы и, как следствие, к уменьшению систематической составляющей дрейфа гироскопа и ухода оси гироскопа от вертикали. Остаточный момент сил сухого трения ΔMт12 при реверсировании вращения средних колец ТПШ 5, 6 и узлов ВКТ 7, 8: 
угловые скорости, задаваемые блоком реверса, причем,
первые полпериода реверса ωp1 > 0, ωp2 < 0,
вторые полпериода реверса ωp1 < 0, ωp2 > 0,
а период реверса может быть либо фиксированной величиной, либо формироваться в зависимости от предполагаемого времени действия продольных ускорений.
Поперечная коррекция работает аналогично режиму 1, создается момент коррекции 
Режим 4. "Боевой разворот".
В режиме "Боевой разворот" ЛА движется с продольными ускорениями и имеет угловые скорости виража, вследствие чего на маятниковые чувствительные элементы действуют инерционные силы, отклоняющие их к положению ложной вертикали. Так как эти ускорения и угловые скорости могут действовать в течение достаточно длительного промежутка времени, то системы коррекции, работая в режиме слежения за ложной вертикалью, могут значительно отклонить главную ось гироскопа от вертикали. Поэтому для уменьшения погрешностей, возникающих вследствие действия продольных ускорений и угловых скоростей виража, производят отключение продольной и поперечной коррекции.
Рассмотрим работу продольного канала коррекции. На первом входе КУ 27 в зависимости от знака угла α отклонения главной оси гироскопа от вертикали формируется сигнал уровня логического "0" или "1". Если значение продольного ускорения ЛА превышает пороговое значение и время действия ускорения больше времени задержки отключения коррекции, то на выходе ВК 24 установится логическая "1", и КУ 27 отключит цепь коррекции от МЧЭ 11. В этом случае сигнал блока реверса 26 является определяющим, поступает на выход КУ 27 и периодически реверсирует направление вращения приводных двигателей 9, 10 и, следовательно, средних колец ТШП 5, 6 и узлов ВКТ 7, 8, что приводит к осреднению моментов сил сухого трения в оси подвеса наружной рамы и, как следствие, к уменьшению систематической составляющей дрейфа гироскопа и ухода оси гироскопа от вертикали. Остаточный момент сил сухого трения ΔMт12 при реверсировании вращения средних колец ТШП 5, 6 и узлов ВКТ 7, 8: 
угловые скорости, задаваемые блоком реверса, причем,
первые полпериода реверса ωp1 > 0, ωp2 < 0,
вторые полпериода реверса ωp1 < 0, ωp2 > 0,
а период реверса может быть либо фиксированной величиной, либо формироваться в зависимости от предполагаемого времени действия продольных ускорений.
Рассмотрим работу поперечного канала коррекции. На первом входе КУ 28 в зависимости от знака угла β отклонения главной оси гироскопа от вертикали формируется сигнал уровня логического "0" или "1". Если значение угловой скорости виража ЛА превышает пороговое значение и время действия угловой скорости виража больше времени задержки отключения коррекции, то на выходе ВК 25 установится логическая "1", и КУ 28 подключит на свои выходы сигнал блока реверса 26, приведенный к уровню управляющих сигналов приводными двигателями 17 и 18 (например, выдаст соответствующие фазы трехфазного напряжения). При этом направление вращения приводных двигателей 17, 18 и, следовательно, средних колец ТШП 13, 14 и узлов ВКТ 15, 16 периодически реверсируется, что приводит к осреднению моментов сил сухого трения в оси подвеса наружной рамы и, как следствие, к уменьшению систематической составляющей дрейфа гироскопа и ухода оси ротора гироскопа от вертикали. Остаточный момент сил сухого трения ΔMт34 при реверсировании вращения средних колец ТШП 13, 14 и узлов ВКТ 15, 16 будет определяться соотношением
- угловые скорости, задаваемые блоком реверса, причем,
первые полпериода peвepca ωp3 > 0, ωp4 < 0;
вторые полпериода реверса ωp4 < 0, ωp3 > 0,
а период реверса может быть либо фиксированной величиной, либо формироваться в зависимости от предполагаемого времени виража.
Таким образом, при отсутствии маневрирования ЛА (постоянно действующих ускорений) направление вращения приводных двигателей ТШП и ВКТ определяется направлением отклонения главной оси гироскопа (кинетического момента H) от местной вертикали и моменты сил сухого трения в соответствующих конструктивных элементах ТШП и ВКТ являются корректирующими. Если ЛА движется с ускорениями, то выключатели коррекций переводят приводные двигатели на управление от блока реверса с целью осреднения моментов сил сухого трения в ТШП и ВКТ, которые в данном случае становятся моментами, вызывающими дрейф.
Для обеспечения заданных точностных характеристик при различных условиях полета ВКТ, расположенные симметрично относительно центра подвеса, должны иметь одинаковое количество контактных щеток (коллекторных пластин), а их контактное давление должно быть выбрано таким, чтобы абсолютные значения моментов сил сухого трения в указанных ВКТ были равны (практически разброс моментов должен лежать в заданных пределах). В реальной конструкции допускается иметь несколько пластин с регулируемым контактным давлением.
Режим 5. "Запуск гировертикали".
В режиме "Запуск гировертикали" необходимо быстрое приведение главной оси гироскопа к вертикали. Существующая продольная и поперечная коррекция с помощью моментов сил сухого трения не обеспечивает этого требования. Запуск гировертикали осуществляется с помощью коммутатора 29, на первом входе которого в зависимости от знака угла α отклонения главной оси гироскопа от вертикали по оси OZg формируются сигнал уровня логического "0" или "1", на втором входе которого в зависимости от знака угла β отклонения главной оси гироскопа от вертикали по оси OXg формируется сигнал уровня логического "0" или "1", на третий вход КУ 29 поступает сигнал, приведенный к уровню логической "1" с задатчика ускоренного восстановления, сигнал на третьем входе КУ 29 является определяющим в данном режиме работы. Коррекционные моторы 20, 21 в соответствии с уровнем сигналов на первом и втором входах КУ 29 создают форсированные моменты и осуществляют ускоренное приведение главной оси гироскопа к вертикали.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Устройство для демонстрации гироавтомобиля | 1987 |
|
SU1462398A1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
Устройство предназначено для использования в гироскопической технике. Устройство содержит выключатели продольной и поперечной коррекции, вычислительное устройство, коррекционные моторы, задатчик ускоренного восстановления. Два управляемых коммутатора по сигналам маятниковых чувствительных элементов, выключателей коррекции и блока реверса управляют приводными двигателями. Третий управляемый коммутатор по сигналам чувствительных элементов и задатчика управляет коррекционными моторами. Обеспечивается повышение точности гировертикали за счет использования моментов сил сухого трения трехколечных шарикоподшипников и вращающихся коллекторных токоподводов для коррекции. 2 ил.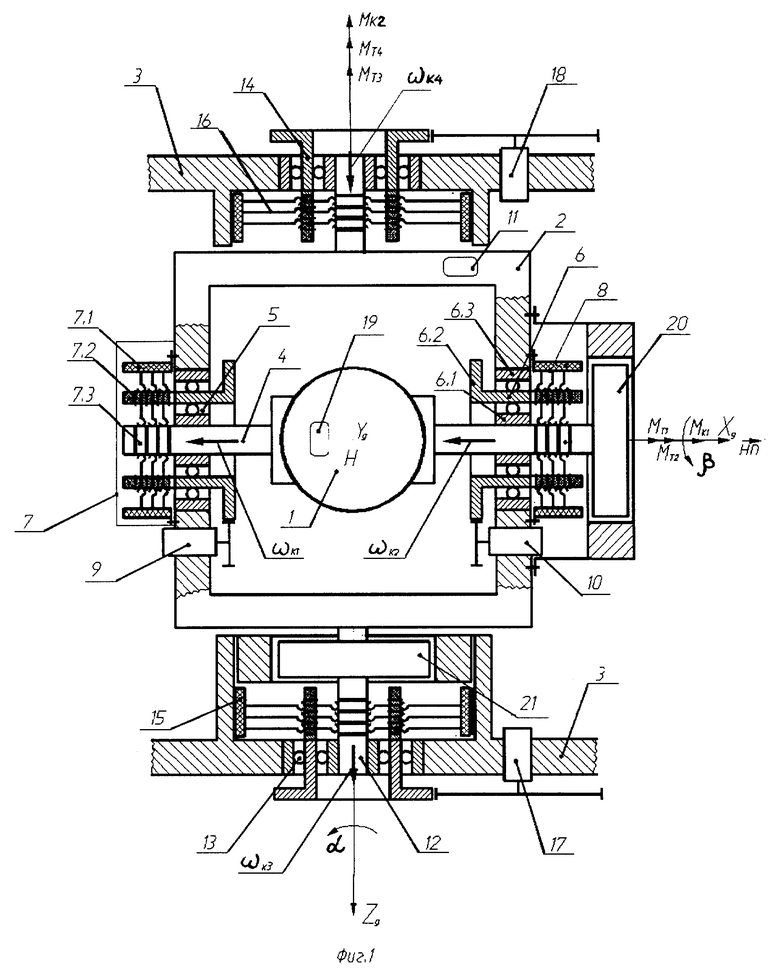
Устройство коррекции гировертикали, содержащее трехстепенной гироскоп с вертикальной осью гиромотора, установленного в гироузле, который своими полуосями установлен во внутренних кольцах первого и второго трехколечных шарикоподшипников, средние кольца которых кинематически связаны с вращающимися коллекторами первого и второго узлов вращающихся коллекторных токоподводов и с первым и вторым приводными двигателями, которые, как и внешние кольца первого и второго трехколечных шарикоподшипников, закреплены на наружной раме, которая своими полуосями установлена во внутренних кольцах третьего и четвертого трехколечных шарикоподшипников, средние кольца которых кинематически связаны с вращающимися коллекторами третьего и четвертого узлов вращающихся коллекторных токоподводов и с третьим и четвертым приводными двигателями, которые, как и внешние кольца третьего, четвертого трехколечных шарикоподшипников, закреплены на следящей раме, узлы продольной и поперечной коррекции, состоящие из первого и второго маятниковых чувствительных элементов, установленных на наружной раме и гироузле и соединенных с первым и вторым усилителями-преобразователями соответственно, первый и второй коррекционные моторы, имеющие по два входа, блок реверса, включающее выключатели продольной и поперечной коррекции, вычислительное устройство, входами которого являются входы по путевой скорости, широте и курсу, а выходы подключены к первым входам первого и второго коррекционных моторов, задатчик ускоренного восстановления, отличающееся тем, что в устройство коррекции введены три управляемых коммутатора, имеющие первый, второй и третий управляющие входы и первый и второй выходы, причем первый, второй и третий управляющие входы первого коммутатора соответственно подключены к выходам первого усилителя-преобразователя, блока реверса и выключателя продольной коррекции, а первый и второй выходы соответственно соединены с первым и вторым приводными двигателями; первый, второй и третий управляющие входы второго коммутатора соответственно подключены к выходам второго усилителя-преобразователя, блока реверса и выключателя поперечной коррекции, а первый и второй выходы соответственно соединены с третьим и четвертым приводными двигателями; первый, второй и третий управляющие входы третьего коммутатора соответственно подключены к выходам первого и второго усилителей-преобразователей и задатчика ускоренного восстановления, а первый и второй выходы соответственно соединены с вторыми входами первого и второго коррекционных моторов.
| Сканирующий предметный столик для систем автоматического контроля параметров полупроводниковых пластин | 1987 |
|
SU1536344A1 |
| ГИРОГОРИЗОНТ | 1993 |
|
RU2062987C1 |
| EP 0258085 А1, 02.03.88. | |||

