Haapaff/wiue Овшкмиш
:д эо
:л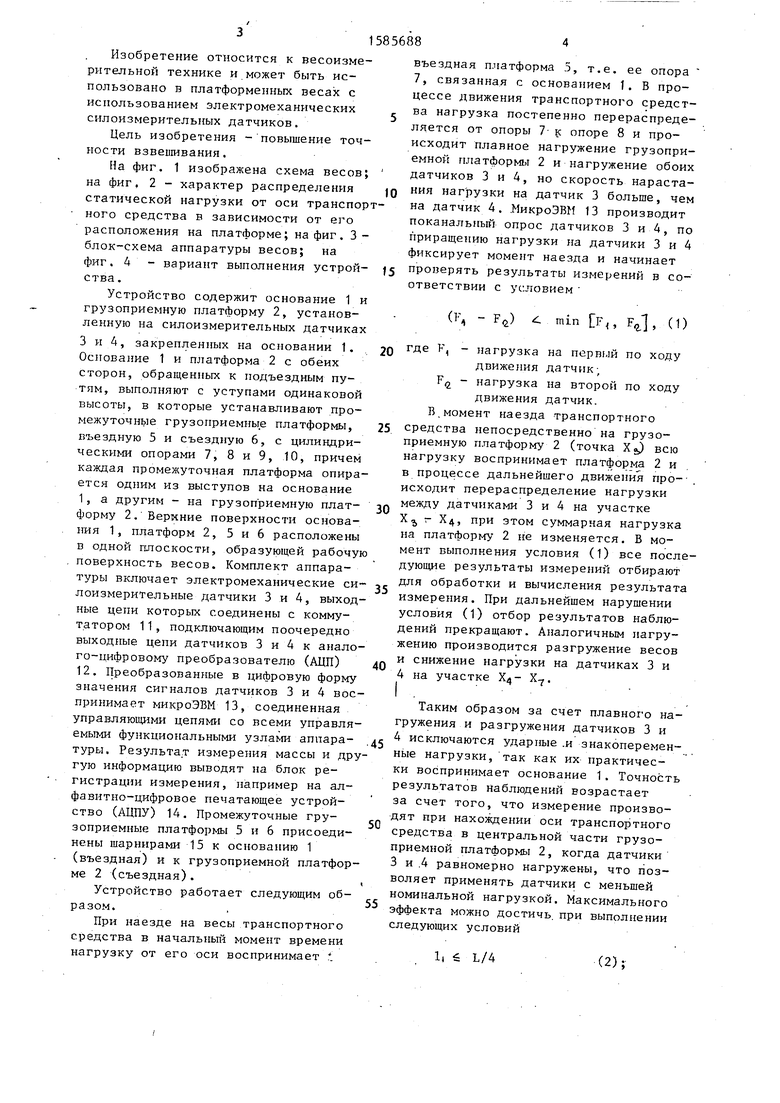
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания автомобилей в движении | 1991 |
|
SU1809323A1 |
| Весы для взвешивания большегрузных объектов | 1991 |
|
SU1774189A1 |
| Весы | 1979 |
|
SU1035428A1 |
| Устройство тензометрических весов | 1985 |
|
SU1318797A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ В ДВИЖЕНИИ | 1992 |
|
RU2046299C1 |
| Весы для взвешивания транспортных средств | 1985 |
|
SU1303839A1 |
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2002 |
|
RU2239798C2 |
| Грузоприемное устройство платформенных весов | 1984 |
|
SU1247666A1 |
| Весы для определения нагрузок на оси транспортного средства | 2020 |
|
RU2730375C1 |
| СПОСОБ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2380474C1 |
Изобретение относится к весоизмерительной технике и может быть использовано в весах для поосного взвешивания транспортных средств в движении. Цель изобретения - повышение точности измерения. Транспортное средство наезжает на грузоприемную часть весов, состоящую из трех элементов: въездной 5, съездной 6 и грузоприемной 2 платформ. Въездную 5 и съездную 6 платформы выполняют с опорами 7, 8 и 9, 10, опирающимися соответственно на основание 1 и платформу 2 весов, причем продольную координату места контакта опоры с грузоприемной платформой 2 выбирают из условия L 1≤L/4, где L 1 - расстояние от края грузоприемной платформы до места контакта
L - длина платформы, L 2 - расстояние от края платформы до места контакта с грузоприемной платформой выбирают из условия L 2*98L 1. Въездную и съездную промежуточные грузоприемные платформы шарнирно закрепляют соответственно на основании и грузоприемной платформе весов. 1 з.п. ф-лы. 4 ил.
эо эо
10
1585688
Изобретение относится к весоизмерительной технике и.может быть использовано в платформенных весах с использованием электромеханических силоизмерительных датчиков.
Цель изобретения - повышение точности взвешивания.
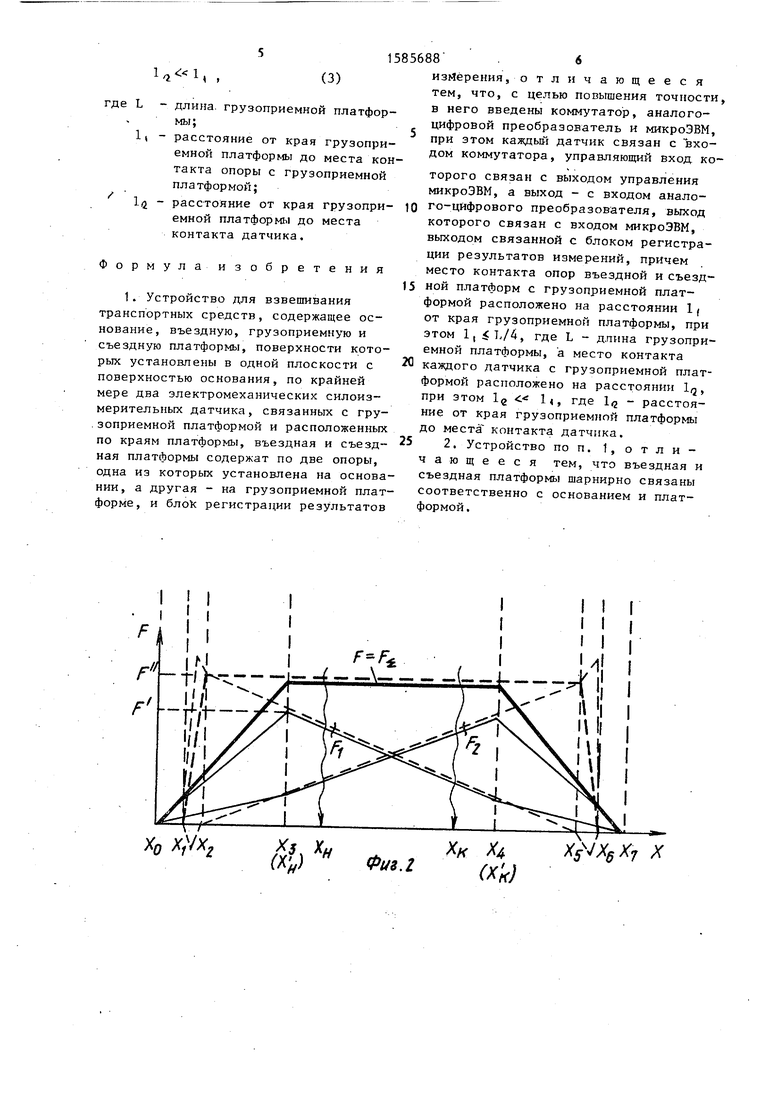
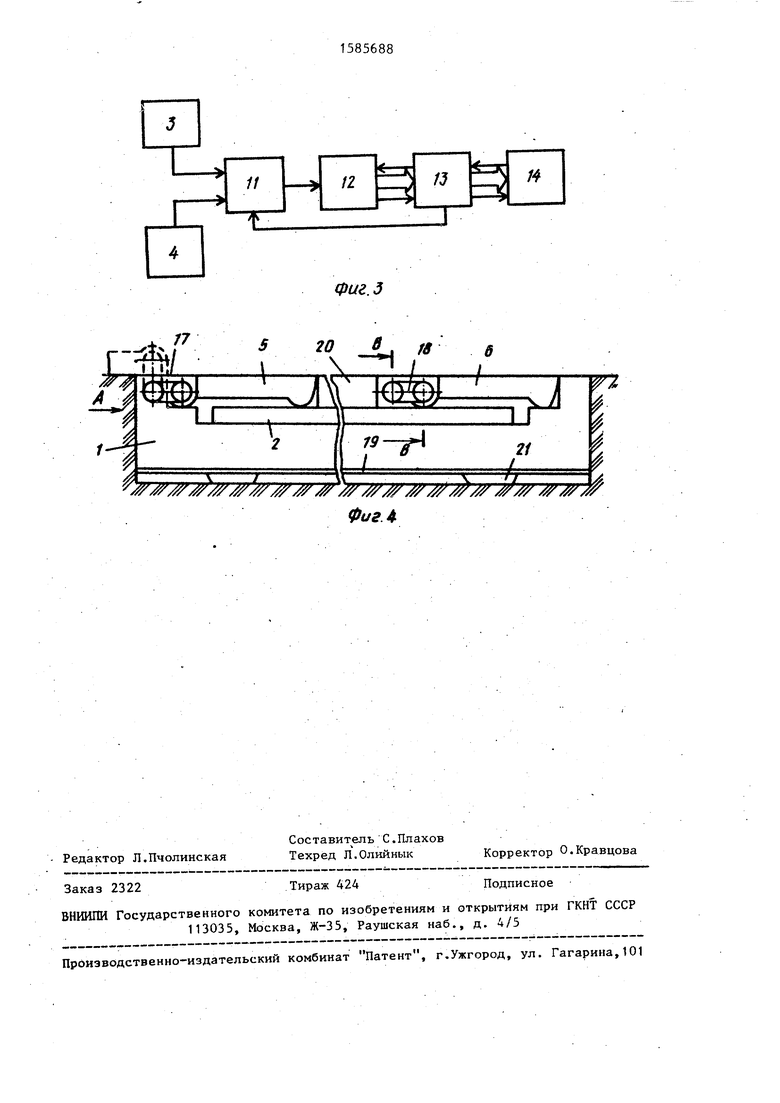
На фиг. 1 изображена схема весов; на фиг, 2 - характер распределения статической нагрузки от оси транспортного средства в зависимости от его расположения на платформе; на фиг. 3- блок-схема аппаратуры весов; на фиг. 4 - вариант выполнения устройства.
Устройство содержит основание 1 и грузоприемную платформу 2, установленную на силоизмерительных датчиках 3 и 4, закрепленных на основании 1. Основание 1 и платформа 2 с обеих сторон, обращенных к подъездным пу15
въездная платформа 5, т.е. ее опора /, связанная с основанием 1. В нро- Цессе движения трансаортного средст ва нагрузка постепенно перераспреде ляется от опоры 7- к опоре 8 и нро- исходит плавное нагружение грузопри емной платформы 2 и нагружение обоих датчиков 3 и А, но скорость нарастания нагрузки на датчик 3 больше, чем на датчик 4. .МикроЭВМ 13 производит поканальный опрос датчиков 3 и 4, по приращению нагрузки на датчики 3 и 4 фиксирует момент наезда и начинает проверять результаты измерений в соответствии с условием
(V, -7) min CF, F, (1)
20
тпм, выполняют с уступами одинаковой высоты, в которые устанавливают промежуточные грузоприемные платформы, 25 въездную 5 и съездную 6, с цилиндрическими опорами 7, 8 и 9, 10, причем каждая промежуточная платформа опирается одним из выступов на основание 1, а другим - на грузоприемную плат- jO Форму 2. Верхние поверхности основания 1, платформ 2, 5 и 6 расположены в одной плоскости, образующей рабочую поверхность весов. Комплект аппарагде К, - нагрузка на первый по ходу
движения датчик; F - нагрузка на второй по ходу
движения датчик. В.момент наезда транспортного средства непосредственно на грузоприемную платформу 2 (точка X,) всю нагрузку воспринимает платформа 2 и в процессе дальнейшего движения про-- исходит перераспределение нагрузки между датчиками 3 и 4 на участке ъ 4 нри этом суммарная нагрузка на платформу 2 не изменяется. В момент выполнения условия (1) все после дующие результаты измерений отбирают
. .j,,j, ctjuictpa- fj,j.,:; t jyjibrciTbi измерении отбирают
туры включает электромеханические си ,5 обработки и вычисления результата лоизмерительные датчики 3 и 4, выход- измерения. При дальнейшем нарушении
условия (1) отбор результатов наблюдений прекращают. Аналогичным нагру- жению производится разгружение весов и снижение нагрузки на датчиках 3 и
40
4 на участке Х.
ные цепи которых соединены с коммутатором 11, подключающим поочередно выходные цепи датчиков 3 и 4 к аналого-цифровому преобразователю (АЦП) 12. Преобразованные в цифровую форму
значения сигналов датчиков 3 и 4 вое- I
принимает микроЭВМ 13, соединенная Таким образом за счет плавного на- управляющими цепяш. со всеми управля- гружения и разгружения датчиков 3 и емьми функциональными узлами аппара- .45 исключаются Ударные .и знакоперемен- туры. Результат измерения массы и дру- ные нагрузки, так как их, нрак ичес- - гую информацию выводят на блок ре- ----r in et.
гистрации измерения, например на алфавитно-цифровое печатающее устройство (АЦПУ) 14. Промежуточные грузоприемные платформы 5 и 6 присоединены шарнирами 15 к основанию 1 (въездная) и к грузоприемной платформе 2 (съездная).
Устройство работает следующим образом.
При наезде на весы транспортного средства в начальньш момент времени нагрузку от его оси воспринимает .
ки воспринимает основание 1. Точность результатов наблюдений возрастает за счет того, что измерение произво5JJ дят при наховдении оси транспортного средства в центральной части грузоприемной платформы 2, когда датчики J и .4 равномерно нагружены, что позволяет применять датчики с меньшей
номинальной нагрузкой. Максимального эффекта можно достичь, при выполнении следующих условий
1) ё L/4
(2);
10
5
въездная платформа 5, т.е. ее опора - /, связанная с основанием 1. В нро- Цессе движения трансаортного средства нагрузка постепенно перераспределяется от опоры 7- к опоре 8 и нро- исходит плавное нагружение грузопри- емной платформы 2 и нагружение обоих датчиков 3 и А, но скорость нарастания нагрузки на датчик 3 больше, чем на датчик 4. .МикроЭВМ 13 производит поканальный опрос датчиков 3 и 4, по приращению нагрузки на датчики 3 и 4 фиксирует момент наезда и начинает проверять результаты измерений в соответствии с условием
(V, -7) min CF, F, (1)
0
5 O
где К, - нагрузка на первый по ходу
движения датчик; F - нагрузка на второй по ходу
движения датчик. В.момент наезда транспортного средства непосредственно на грузоприемную платформу 2 (точка X,) всю нагрузку воспринимает платформа 2 и в процессе дальнейшего движения про-- исходит перераспределение нагрузки между датчиками 3 и 4 на участке ъ 4 нри этом суммарная нагрузка на платформу 2 не изменяется. В момент выполнения условия (1) все последующие результаты измерений отбирают
fj,j.,:; t jyjibrciTbi измерении отбирают
5 обработки и вычисления результата измерения. При дальнейшем нарушении
условия (1) отбор ре дений прекращают. Ана жению производится ра и снижение нагрузки н
4 на участке Х.
I
Таким образом за счет плавного на- гружения и разгружения датчиков 3 и 45 исключаются Ударные .и знакоперемен- ные нагрузки, так как их, нрак ичес- - ----r in et.
ки воспринимает основание 1. Точность результатов наблюдений возрастает за счет того, что измерение произво5JJ дят при наховдении оси транспортного средства в центральной части грузоприемной платформы 2, когда датчики J и .4 равномерно нагружены, что позволяет применять датчики с меньшей
номинальной нагрузкой. Максимального эффекта можно достичь, при выполнении следующих условий
1) ё L/4
(2);
,
(3)
де L
-длина, грузоприемной платформы;
1 - расстояние от края грузоприемной платформы до места контакта опоры с грузоприемной платформой;
-расстояние от края грузоприемной платформы до места контакта датчика.
1
Формула изобретения
Г) Ф,,.,
(х
10
измерения, о тли чающееся тем, что, с целью повышения точности, в него введены коммутатор, аналого- цифровой преобразователь и микроЭВМ, при зтом каждый датчик связан с входом коммутатора, управляющий вход которого связан с выходом управления микроэвм, а выход - с входом аналого-цифрового преобразователя, выход которого связан с входом микроЭВМ, выходом связанной с блоком регистрации результатов измерений, причем место контакта опор въездной и съезд- 15 ной платформ с грузоприемной платформой расположено на расстоянии 1, от края грузоприемной платформы, при этом 1, iL/4, где L - длина грузоприемной платформы, а место контакта кавдого датчика с грузоприемной плат- Формой расположено на расстоянии „
ТТПиГ Omy-v. 1 - 1.
2fl
при зтом 1 1,, где 1 - расстояние от края грузоприемной платформы до места контакта датчика. 25 2. Устройство по п. 1, отличающееся тем, что въездная и съездная платфор№1 шарнирно связаны соответственно с основанием и плат- Формой .
(х )
XfVXsX, X
Фиг.З
фиг. 4
Редактор Л.Пчолинская
Составитель С.Плахов Техред Л.Олийнык
Заказ 2322
Тираж 424
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. -4/3
Корректор О.Кравцова
Подписное
| Патент CL JA Р 4339010, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU158430A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
