Предлагаемое изобретение относится к весоизмерительной технике, в частности к автомобильным, вагонным, товарным весам и дозаторам.
Известны электронные весы (патент США 4782904 G01G 19/40 11.08.88) содержащие микроЭВМ входы и выходы которой подключены через порты ввода вывода к входам АЦП, фильтр низкой частоты, грузоприемную платформу, тензометрический датчик, первый и второй входы которого соединены с первым и вторым выходами генератора синусоидального сигнала. Измерительная диагональ подключена к входам измерительного усилителя, выход которого соединен с первым входом фазового детектора, а второй вход подключен к третьему выходу генератора синусоидального сигнала.
Электронные весы работают следующим образом. При нагружении грузоприемной платформы значение веса передаются на тензометрический датчик, напряжение питания которого подается с первого и второго выходов генератора синусоидального сигнала, на первый и второй входы тензометрического датчика, а сигнал пропорциональный значению веса, вырабатывается в измерительной диагонали и передается к входам измерительного усилителя и далее на вход фазового детектора.
После детектирования, фильтра низкой частоты выделяется напряжение равное модулю разности значению, которое поступает на вход АЦП. В дальнейшем полученное значение АЦП передается через порты ввода-вывода в микроЭВМ, для дальнейшей обработки.
При обработке используются выборки сигнала, пропорциональные среднему значению обрабатываемых величин. Недостатком этих электронных весов является обработка (усреднение) большого числа весовых значений, что снижает быстродействие и чувствительность электронных весов.
Известны электронные весы (патент RU №2071039 С1, GOIG 19/43, зарегистрирован от 27.121996 г.) содержащие микроЭВМ, выходы и входы которой подключены через порты ввода вывода, а выводы - к выходам АЦП, грузоприемную платформу, тензометрический датчик, устройство нагружения, передаваемое силовое воздействие от грузоприемной платформы на тензометрический датчик. Первый и второй входы моста тензометрического датчика соединены с первым и вторым выходами генератора синусоидального сигнала, а измерительная диагональ моста тензометрического датчика подключена к входам измерительного усилителя, выход которого соединен с первым входом фазового детектора и подключен на вход дифференциального усилителя, а выход повторителя соединен последовательно с делителем напряжения, фильтром частоты, дифференциальным усилителем и интегратором. Выход интегратора подключен на первый вход АЦП.
Электронные весы работают следующим образом. В исходном состоянии грузоприемная платформа через устройство нагружения подгружает тензометрический датчик. Данное значение подгрузки тензометрического датчика соответствует нулевому значению веса. Тензометрический датчик воспринимает номинальную нагрузку и сигнал разбаланса в виде амплитудно-модулированного сигнала поступает на вход измерительного усилителя. После усиления измерительным усилителем амплитудно-модулированный сигнал поступает на вход фазового детектора, далее демодулированный сигнал поступает на вход фазового детектора, далее демодулированный сигнал подается на вход интегратора, который интегрирует пульсации и поступает на вход АЦП.
МикроЭВМ через порты ввода-вывода обрабатывает полученные значения с АЦП.
МикроЭВМ обрабатывает поступающие значения информации с учетом исходного нуля, выдает информацию, соответствующую данному значению веса, и отображает значение веса блоком индикации.
Недостатком этих электронных весов является низкая чувствительность весов при работе на минимальном диапазоне взвешивания.
Наиболее близким по технической сущности к предлагаемому изобретению являются электронные весы (патент RU №2050528 С, G01G 19/43: приоритет 02.04.1993, зарегистрирован от 20.121995 г.) содержащие тензометрическую платформу, тензометрический датчик, устройство нагружения, передающее силовое воздействие от грузоприемной платформы на тензометрический датчик. Первый, второй, третий и четвертый выходы тензометрического датчика соединены с первым, вторым, третьим и четвертым выходами усилителя мощности, вход которого подключен к выходу генератора синусоидального сигнала, измерительная диагональ моста тензометрического датчика соединена со входом измерительного усилителя, выход которого через фазовый детектор подключен на вход АЦП, выходы которого через порты ввода-вывода подключены к микроЭВМ.
Весы работают следующим образом, при нагружении грузоприемной платформы через устройство нагружения, значение веса передается на тензометрический датчик, с выхода которого сигнал, пропорциональный усилию, подается на вход измерительного усилителя и далее на вход фазового детектора. После обработки фильтром низкой частоты выделяется значение несущей, которая поступает на вход АЦП. С АЦП полученные значения через порты ввода-вывода передаются в микроЭВМ.
Недостатком данных весов является малая чувствительность при нагружении минимальными значениями силы. Целью изобретения является повышение чувствительности электронных весов.
Цель достигается тем, что электронные весы содержащие: блок управления, основание, грузоприемную платформу, тензометрические датчики, закрепленные на основании, и устройство нагружения, передающее силовое воздействие от грузоприемной платформы на тензометрические датчики, входы которых параллельно подключены к первому, второму, третьему и четвертому выходам блока управления, соединенным с выходами усилителя мощности соответственно, вход которого подключен к выходу генератора синусоидального тока, а выходы тензометрических датчиков подключены параллельно к первому, второму входам блока управления, соединенным через первый фильтр низкой частоты с входами измерительного усилителя, причем аналого-цифровой преобразователь, клавиатура, панель индикации соединены соответственно через первый, второй, третий порты ввода-вывода микроконтроллера с микроконтроллером, отличаютя тем, что введены фильтр низких частот, двухполупериодный выпрямитель, первый, второй повторители, сумматор, второй фильтр низкой частоты, при этом вход двухполупериодного выпрямителя соединен с выходом измерительного усилителя через фильтр верхних частот, а первый выход двуполупериодного выпрямителя через первый повторитель подключен к первому входу сумматора, второй же выход двухполупериодного выпрямителя через второй повторитель подключен ко второму входу сумматора, выход которого подключен через второй фильтр низкой частоты к входу аналого-цифрового преобразователя.
Для доказательства соответствия предложенного технического решения критерию существенные отличия определим в каких технических решениях имеются признаки, сходные с предлагаемыми, отличающими заявляемое техническое решение от прототипа. Отличительными признаками предложенных электронных весов являются: фильтр верхних частот, повторители, сумматор а также фильтр низких частот (см. Гутников B.C. Интегральная электроника в измерительных устройствах.-Л.: Энергия, 1980 г.), двухполупериодный выпрямитель (см. А.Дж.Пейтон, В.Волш Аналоговая электроника на операционных усилителях. - М.: БИНОМ, 1994 г.)
Применение фильтра верхних частот, фильтра низкой частоты, повторителей, сумматора, двухполупериодного выпрямителя и имеющиеся схемные отличительные решения, а также их взаимосвязи с микроконтроллером, блоком управления через аналого-цифровой преобразователь позволяет повысить чувствительность электронных весов за счет выделения и выпрямления переменного сигнала несущей частоты при малых уровнях сигнала от тезометрических датчиков и фильтрации низкочастотного сигнала помехи постоянного напряжения.
Наличие таких новых свойств позволяет сделать вывод о том что предложенное техническое решение обладает существенными отличиями.
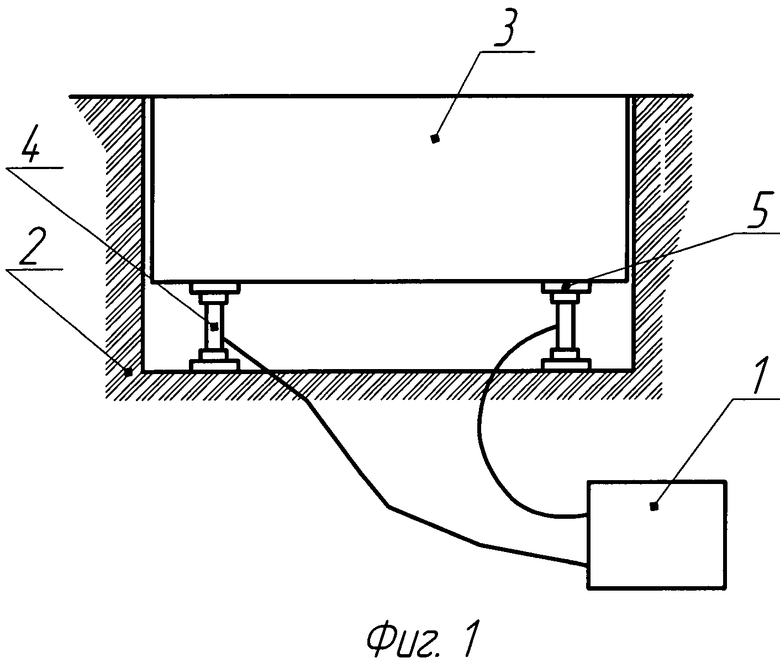
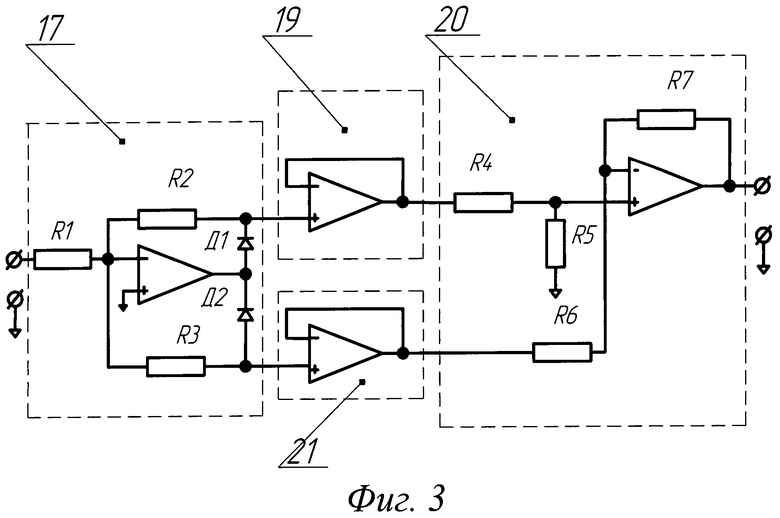
На фиг.1 показана структурная схема электронных весов, на фиг.2 - блок схема электронных весов, на фиг.3 - электронная схема демодуляции сигнала низкой частоты содержащая двухполупериодный выпрямитель, первый и второй повторители, сумматор и их взаимосвязи.
Электронные весы фиг.1, фиг.2 содержат: блок управления 1, основание 2, грузоприемную платформу 3, тензометрические датчики 4, устройство нагружения 5 передает силовое воздействие от грузоприемной платформы 3 на тензометрические датчики 4, входы тензометрических датчиков 4 подключены параллельно к первому, второму, третьему и четвертому выходам блока управления 1, соединенным с выходами усилителя мощности 6 соответственно, вход усилителя мощности 6 подключен к выходу генератора синусоидального сигнала 7, выходы тензометрических датчиков 4 подключены параллельно к первому, второму входам блока управления 1, соединенным через первый фильтр низкой частоты 81 с входами измерительного усилителя 9, аналого-цифрового преобразователя 10, клавиатура 11, панели индикации 12 подключены через первый 13, второй 14, третий 15, порты ввода-вывода микроконтроллера с микроконтроллером 16, при этом вход двухполупериодного выпрямителя 17 соединен с выходом измерительного усилителя 9 через фильтр верхних частот 18, первый же выход двухполупериодного выпрямителя 17 через первый повторитель 19 подключен к первому входу сумматора 20, а второй выход двухполупериодного выпрямителя 17 через второй повторитель 21 подключен ко второму входу сумматора 20, выход сумматора 20 подключен через второй фильтр низкой частоты 22 к входу аналого-цифрового преобразователя 10. На фиг.3 показана электронная схема демодуляции сигнала несущей частоты, содержащая двухполупериодный выпрямитель 17, выход которого подключен через первый повторитель 19 и второй повторитель 21 на входы сумматора 20.
Электронные весы работают следующим образом. В исходном состоянии грузоприемная платформа 3 через устройство нагружения 5 подгружает тензометрические датчики 4 (тарная нагрузка). Данное значение тарной нагрузки является исходным и принимается после обработки микроконтроллером 16 за нуль. После включения питания генератор синусоидального сигнала 7 вырабатывает опорный синусоидальнй сигнал (несущая частота) для питания тезометрических датчиков 4 через усилитель мощности 6. Воспринимая тарную нагрузку, тезометрические датчики 4 вырабатывают соответствующий синусоидальный сигнал (разбаланс моста тензометрического датчика), амплитуда которого пропорциональна соответствующей нагрузке. Первый фильтр низкой частоты 8 отфильтровывает помехи, превышающие спектр несущей частоты генератора синусоидального сигнала 7. Усиленный сигнал с выхода измерительного усилителя 9 поступает на вход фильтра верхних частот 18, тем самым ограничивается спектр помех на уровне близким к низкочастотному спектру, связанному с постоянной составляющей. Далее сигнал несущей частоты поступает на вход двухполупериодного выпрямителя 17, после выпрямления которого через повторители 19, 21 подается на вход сумматора 20, получая демодулированный сигнал несущей частоты. Для выделения модулированного амплитудного сигнала выход сумматора 20 подключен на вход второго фильтра низкой частоты 22, частота среза которого ниже несущей частоты синусоидального генератора 7. Таким образом, на выходе второго фильтра низкой частоты 22 получаем сигнал постоянного напряжения, амплитуда (величина) которого пропорциональна приложенному усилию на тензометрические датчики 4. С выхода второго низкочастотного фильтра 22 сигнал постоянного напряжения поступает на вход аналого-цифрового преобразователя 10, с выхода которого преобразованный в цифровые значения через порт ввода-вывода 13 микроконтроллера 16 обрабатывается микроконтроллером 16 по соответствующему алгоритму, а значения выводятся на панель индикации 12 блока управления 1.
В дальнейшем при нагружении грузоприемной платформы 3 определенным эталонным значением груза получаем цифровые значения, являющиеся исходными для масштабирования, т.е. таким образом вводятся с клавиатуры 11 блока управления 1 в различных точках эталонные значения груза, соответствующие цифровым значениям, и запоминаются микроконтроллером 16. Микроконтроллер 16, обработав полученные цифровые значения от тезометрических датчиков 4 и клавиатуры 11, строит эталонную прямую, относительно которой в дальнейшем будет происходить считывание истинных значений взвешиваемой массы продукта.
При нагружении грузоприемной платформы 3 различными массами продукта полученное тезометрическими датчиками 4 усилие через устройство нагружения 5 обрабатывается микроконтроллером 16 и сравнивается с эталонным значением, вырабатывая тем самым истинные значения, и отображается на панели индикации 12 блока управления 1.
По сравнению с прототипом электронные весы обладают повышенной чувствительностью за счет применения фильтра верхних частот 18, двух фильтров нижних частот 8, 22, сумматора 20, повторителей 19, 21, а также двухполупериодного выпрямителя 17, работающего при малых уровнях сигнала.
На дату подачи патента разработаны, испытаны и опробованы опытные образцы электронных весов.
Литература
1.Электронные весы. Патент США №4782904, G01G 19/40 от.11.08.88.
2. Электронные весы. Патент RU №2071039 С1, G01G 19/43 от 27.12. 1996.
3. Электронные весы. Патент RU №2050525 С, G01G 19/43 от 02/04/1993.
4. А.Дж.Пейтон, В.Волш Аналоговая электроника на операционных усилителях. - М.: БИНОМ, 1994 г.
5. Гутников B.C. Интегральная электроника в измерительных устройствах -Л: Энергия, 1980 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЕ ВЕСЫ | 1993 |
|
RU2050528C1 |
| ВАГОННЫЕ ВЕСЫ | 2013 |
|
RU2561245C2 |
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
| КОМБИНАЦИОННЫЙ ДОЗАТОР | 2002 |
|
RU2229103C2 |
| Преобразователь "Угол-Код" индукционного датчика угла | 2016 |
|
RU2649033C1 |
| Весы с автоматическим изменением диапазонов | 1988 |
|
SU1747934A1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА КОНТРОЛЯ И РЕГИСТРАЦИИ ПОТЕРЬ ЭЛЕКТРОЭНЕРГИИ В ПРИСОЕДИНЕНИЯХ РАСПРЕДЕЛИТЕЛЬНОГО УСТРОЙСТВА | 2013 |
|
RU2541207C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Многоканальная микропроцессорная система контроля и регистрации потерь электроэнергии в присоединениях распределительного устройства Ермакова-Горобца | 2013 |
|
RU2616159C2 |
| Счетчик ресурса трансформаторов на двухтрансформаторной подстанции (варианты) | 2013 |
|
RU2616165C2 |
Предлагаемое изобретение относится к весоизмерительной технике, в частности к автомобильным, вагонным, товарным весам и дозаторам. Устройство содержит блок управления, основание, грузоприемную платформу, тензометрические датчики, устройство нагружения, усилитель мощности, подключенный к выходу генератора синусоидального сигнала, первый фильтр низкой частоты соединен с измерительным усилителем аналого-цифрового преобразователя, клавиатуру, панель индикации, порты ввода-вывода подключены к микроконтроллеру, двухполупериодный выпрямитель, фильтр верхних частот, первый повторитель, сумматор, второй повторитель, второй фильтр низкой частоты. Технический результат заключается в повышении чувствительности электронных весов. 3 ил. 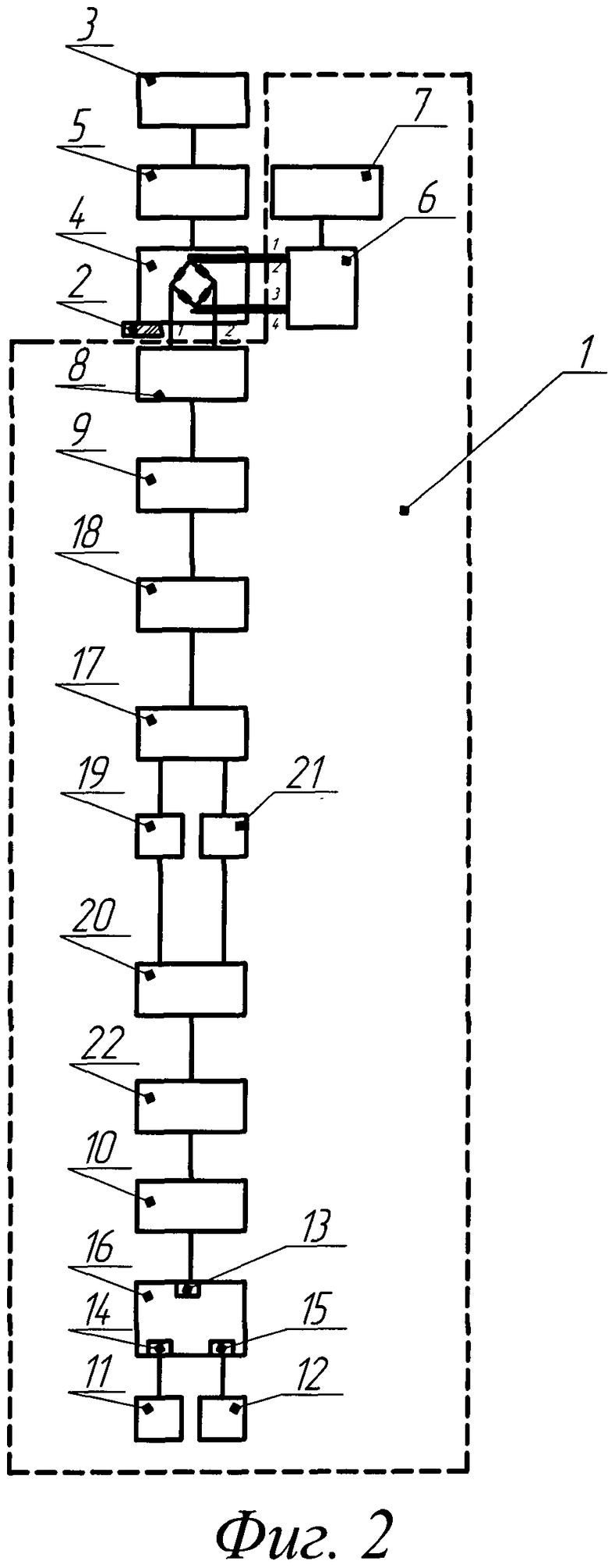
Электронные весы, содержащие блок управления, основание, грузоприемную платформу, тензометрические датчики, закрепленные на основании, и устройство нагружения, передающее силовое воздействие от грузоприемной платформы на тензометрические датчики, входы которых параллельно подключены к первому, второму, третьему и четвертому выходам блока управления, соединенным с выходами усилителя мощности соответственно, вход которого подключен к выходу генератора синусоидального сигнала, а выходы тензометрических датчиков подключены параллельно к первому, второму входам блока управления, соединенным через первый фильтр низкой частоты с входами измерительного усилителя, причем аналого-цифровой преобразователь, клавиатура, панель индикации соединены соответственно через первый, второй, третий порты ввода-вывода микроконтроллера с микроконтроллером, отличающиеся тем что введены фильтр верхних частот, двухполупериодный выпрямитель, первый, второй повторители, сумматор, второй фильтр низкой частоты, притом вход двухполупериодного выпрямителя соединен с выходом измерительного усилителя через фильтр верхних частот, а первый выход двухполупериодного выпрямителя через первый повторитель подключен к первому входу сумматора, второй же выход двухполупериодного выпрямителя через второй повторитель подключен к второму входу сумматора, выход которого подключен через второй фильтр низкой частоты к входу аналого-цифрового преобразователя.
| ЭЛЕКТРОННЫЕ ВЕСЫ | 1993 |
|
RU2050528C1 |
| ВИБРОСТЕНД ИСПЫТАТЕЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2398198C1 |
| US 4782904 А 08.11.1988; | |||
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |

