Изобретение относится к электрическим машинам, а точнее к бесконтактным электродвигателям постоянного тока, предназначенным для использования в аппаратах аудио- и видеозаписи.
Известен бесконтактный электродвигатель, содержащий ротор с рабочим постоянным магнитом, статор с обмоткой, блок управления, датчик положения ротора и связанную с ним функционально магнитную систему.
Датчик положения ротора состоит из обоймы, выполненной в виде полого цилиндра с закрепленными на ней датчиками Холла, установленной неподвижно относительно статора. Обойма размещена в зазоре магнитной системы, образованном неподвижным относительно статора кольцевым магнитопроводом, изготовленным из пакета пластин из электротехнической стали и вспомогательным магнитом, намагниченным по диаметру и размещенным в концевой части вала.
Недостатком известного двигателя является неравномерность электромагнитного момента, обусловленная тем, что сигнал, получаемый с датчиков Холла, имеет форму искаженной синусоиды, соответственно и напряжения на обмотках статора имеют отклонения от синусоиды, что приводит к колебаниям электромагнитного момента. Искажения синосуидальности сигналов, получаемых с датчиков Холла, связано с отклонением синусоидальности распределения магнитной индукции в зазоре между магнитопроводом и вспомогательным магнитом. А это, в свою очередь, вызвано тем, что существует технологический эксцентриситет статора и ротора, приводящий к неравномерности воздушного зазора между вспомогательным магнитом и магнитопроводом. Кроме того, существующая неоднородность материала вспомогательного магнита, создающего магнитное поле в зазоре, также приводит к дополнительным отклонениям от синусоидальности магнитного поля в зазоре, что, естественно, привносит свой вклад в изменение синусоидальности сигналов, получаемых с датчиков Холла.
Другим недостатком являются дополнительные затраты, связанные с изготовлением магнитопровода в виде пакета пластин и использованием дорогостоящей электротехнической стали.
Для устранения отмеченных в прототипе недостатков в предлагаемом двигателе, содержащем ротор с рабочим постоянным магнитом, статор с обмотками, электронный блок управления, датчик положения ротора в виде неподвижно установленной обоймы с датчиками Холла и функционально связанную с ним магнитную систему с магнитопроводом и вспомогательным магнитом, магнитная система дополнительно снабжена жестко закрепленным на валу ротора цилиндрическим корпусом из немагнитного материала и удлиненной в поперечном сечении полостью, образованной размещенными в корпусе магнитопроводом из стали обыкновенного качества и вспомогательным магнитом, каждый из которых выполнен в виде двух элементов, образующих противоположные стороны полости, причем длинные стороны полости образованы элементами магнитопровода и выполнены плоскопараллельными, элементы вспомогательного магнита намагничены в направлении, перпендикулярном к плоскостям элементов магнитопровода, а обойма с датчиками Холла расположена в центральной части полости.
Совокупность указанных существенных признаков позволяет достигнуть равномерности электромагнитного момента вследствие того, что в центральной части полости, образованной элементами магнитопровода и вспомогательного магнита, создается строго однородное магнитное поле, однородность которого не нарушается ни технологическим эксцентриситетом, потому что в магнитной системе не происходит изменений при изменении зазора между ротором и статором, поскольку магнитопровод и вспомогательный магнит магнитной системы жестко связаны между собой, ни неоднородностью материала элементов вспомогательного магнита, потому что поле в полости магнитной системы создается элементами магнитопровода. При вращении вала магнитная система создает вращающееся относительно датчиков Холла однородное магнитное поле, наводя в них строго синусоидальные ЭДС. В магнитопроводе, жестко связанном с валом ротора, не возникает потерь на его перемагничивание и потерь, связанных с появлением токов Фуко, вследствие отмеченной выше неподвижности относительно друг друга вспомогательного магнита и магнитопровода, что позволяет изготовить его из стали обыкновенного качества и тем самым снизить затраты на материалы и изготовление.
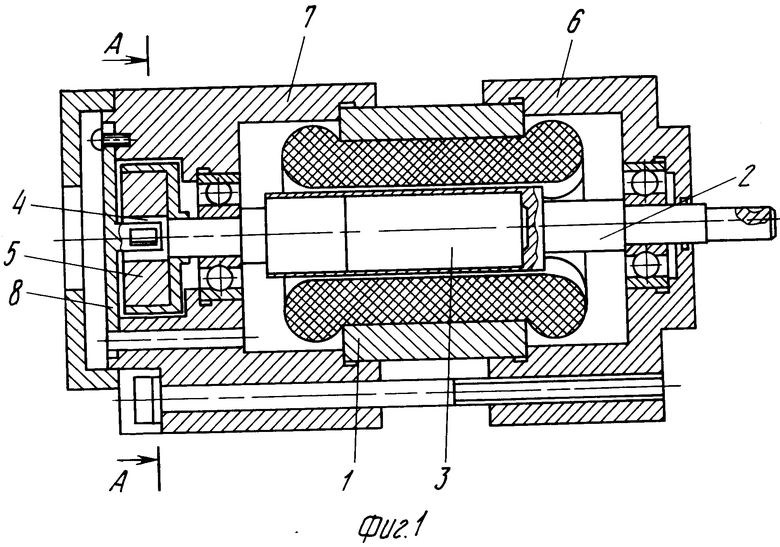
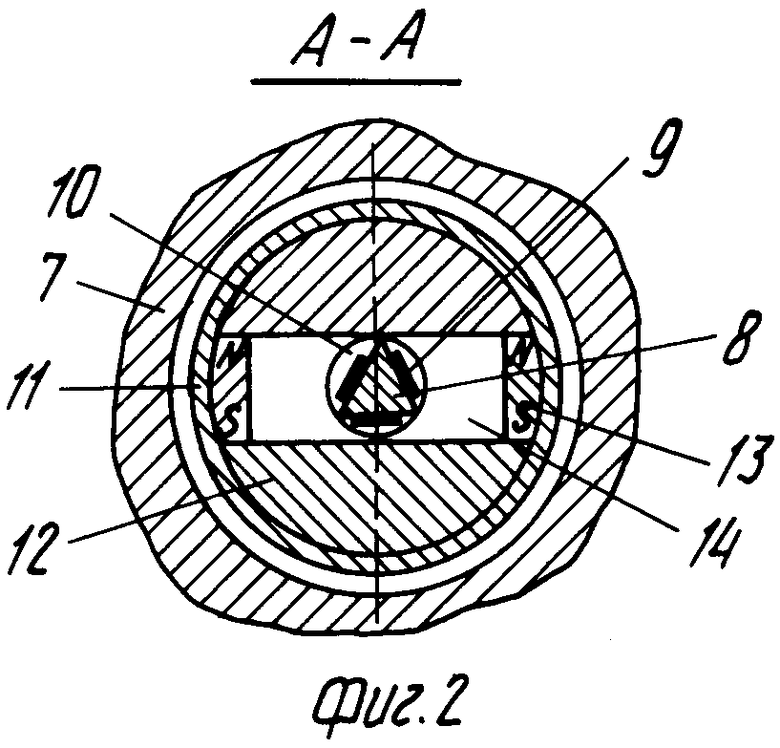
На фиг. 1 представлен бесконтактный двигатель в продольном сечении; на фиг. 2 поперечное сечение А-А магнитной системы двигателя.
В качестве примера, подтверждающего возможность осуществления изобретения, взят бесконтактный двигатель, содержащий двухполюсный статор 1 с трехфазной обмоткой, соединенной треугольником, с размещенным внутри статора 1 ротором 2 с рабочим постоянным двухполюсным магнитом 3, намагниченным диаметрально, датчик положения ротора 4, функционально связанную с ним магнитную систему 5 и электронный блок управления (на чертеже не показан). Статор 1 фиксируется передней 6 и задней 7 крышками. Датчик положения ротора выполнен в виде неподвижно установленной на крышке 7 обоймы 8 (см, фиг. 2) с тремя датчиками Холла 9, размещенными относительно друг друга под углом 120о. Магнитная система 5 состоит из жестко установленного на валу 10 ротора 2 корпуса 11, выполненного в виде полого цилиндра из немагнитного материала и размещенных в нем магнитопровода 12 и вспомогательного магнита 13, каждый из которых выполнен в виде двух элементов. Все элементы образуют удлиненную в поперечном сечении плоскопараллельную полость 14, длинными сторонами которой являются элементы магнитопровода 12. В центральную часть полости входит обойма 8 с датчиками Холла 9.
Бесконтактный двигатель работает следующим образом. На датчики Холла 9 действует однородное магнитное поле полости 14 магнитной системы 5, и на них наводится ЭДС, пропорциональная величине индукции магнитного поля и косинусу угла между нормалью к плоскости датчика Холла 9 и вектором индукции магнитного поля. А так как в центральной части полости 14 индукция величина постоянная, не зависящая ни от технологического эксцентриситета, потому что в магнитной системе 5 ничего не меняется при изменении зазора между ротором 2 и статором 1, поскольку магнитопровод 12 и вспомогательный магнит 13 магнитной системы 5 жестко связаны между собой, ни от неоднородности материала магнита, потому что поле в полости 14 магнитной системы 5 создается элементами магнитопровода 12, то ЭДС на датчиках Холла 9 будет зависеть только от косинуса угла. Возникающие на датчиках Холла 9 ЭДС имеют разность фаз 120о. Сигналы поступают в блок управления, линейно усиливаются и подаются на трехфазную обмотку статора 1, при этом вектор индукции результирующего магнитного поля обмоток статора 1 направлен перпендикулярно вектору индукции магнитного поля рабочего магнита 3. Взаимодействие магнитного поля рабочего магнита 3 с токами обмотки приводит к появлению максимального электромагнитного момента и к вращению ротора 2. Поворот ротора 2 на некоторый угол приводит к повороту вектора индукции магнитного поля в полости 14 магнитной системы 5 относительно датчиков Холла 9 и вызывает на них изменения ЭДС по синусоидальному закону, приводящее к изменению фаз токов обмоток статора 1, что эквивалентно повороту на такой же угол вектора индукции результирующего магнитного поля обмоток (по величине он остается постоянным), а угол между векторами результирующего магнитного поля обмоток и магнитного поля рабочего магнита 3 остается постоянным и равным 90о и, следовательно, электромагнитный момент также остается неизменным. Таким образом получается, что вращающийся вектор индукции результирующего магнитного поля обмоток постоянно перпендикулярен вращающемуся вектору индукции магнитного поля рабочего магнита 3 и электромагнитный момент остается постоянной величиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2195066C2 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ МОМЕНТНЫЙ ДВИГАТЕЛЬ ВОЛЕГОВА В.Е. | 1998 |
|
RU2141159C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1995 |
|
RU2122275C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ МОМЕНТНЫЙ ТОРЦЕВОЙ ДВИГАТЕЛЬ ВОЛЕГОВА В.Е. | 1998 |
|
RU2141158C1 |
| МОТОР-КОЛЕСО | 1998 |
|
RU2156191C2 |
| ГЕНЕРАТОР ТОКА | 1998 |
|
RU2147155C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
Использование: бесконтактные электродвигатели постоянного тока предназначены для аппаратов аудио- и видеозаписи. Сущность изобретения: в двигателе магнитная система жестко установлена на валу ротора и состоит из немагнитного корпуса с размещенными внутри него элементами магнитопровода и вспомогательного магнита так, что образуется полость с однородным магнитным полем. Датчик положения ротора на датчиках Холла расположен в центральной части полости и неподвижен относительно статора. При вращении ротора с датчиков Холла снимаются строго синусоидальные сигналы, усиливаются и подаются на обмотки статора. Возникающие в обмотках токи, взаимодействуя с магнитным полем ротора, создают равномерный электромагнитный момент. Из-за относительной неподвижности магнитопровода и вспомогательного магнита магнитной системы в первом не возникают потери, связанные с перемагничиванием и токами Фуко. Поэтому магнитопровод можно выполнить из стали обыкновенного качества и нешихтованным и тем самым снизить затраты на материал и изготовление. 2 ил.
БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА, содержащий ротор с рабочим постоянным магнитом, статор с обмотками, электронный блок управления, датчик положения ротора в виде неподвижно установленной обоймы с датчиками Холла и функционально связанную с ним магнитную систему с магнитопроводом и вспомогательным магнитом, отличающийся тем, что магнитная система датчика положения ротора дополнительно снабжена жестко закрепленным на валу ротора цилиндрическим корпусом из немагнитного материала и удлиненной в поперечном сечении полостью, образованной размещенными в корпусе магнитопроводом из стали обыкновенного качества и вспомогательным магнитом, каждый из которых выполнен в виде двух элементов, образующих противоположные стороны полости, причем длинные стороны полости образованы элементами магнитопроводов и выполнены плоскопараллельными, элементы вспомогательного магнита намагничены в направлении, перпендикулярном плоскостям элементов магнитопровода, а обойма с датчиками Холла расположена в центральной части полости.
| Овчинников И.Е., Лебедев И.Н | |||
| Бесконтактные двигатели постоянного тока | |||
| М.: Наука, 1979, с.94. |
