Изобретение относится к радиотехнике и может использоваться для автоматического определения местоположения подвижных объектов. Преимущественная область использования это осуществление оперативного контроля за служебными автомобилями, а также поиск угнанных автомобилей в условиях города.
Известна спутниковая система определения местоположения подвижных объектов, содержащая К датчиков сигналов, N искусственных спутников земли, М наземных приемных пунктов информации, которые связаны с центром системы [1] Принцип определения координат датчика сигналов в этой системе основан на определении допплеровского смещения несущей частоты и решении навигационной задачи по трем измерениям [2] с учетом параметров орбит искусственных спутников Земли.
Основными недостатками этой системы являются: во-первых, невысокая точность [3,4] зависящая от многих причин, например, нестабильности частоты генератора датчика сигналов, уровня шумов, приведенных к входу приемного устройства, широты места и угла возвышения искусственного спутника Земли относительно датчика сигнала, во-вторых, сложность и дороговизна системы в отличие от предлагаемой [5]
Данное техническое решение по своей технической сущности является наиболее близким к изобретению и выбрано в качестве прототипа.
Однако реализация этого способа при осуществлении контроля за движением служебных автомобилей, а также для обнаружения и определения местонахождения угнанных автотранспортных средств затруднительна.
Действительно, использование искусственных спутников Земли в качестве ретрасляторов сигналов множества датчиков, расположенных на территории города вызывает неоправданно высокие затраты, хотя стоимость самих датчиков невелика.
Целью изобретения является повышение разрешающей способности системы определения местонахождения автотранспортных средств с привязкой к карте местности.
Для решения поставленной задачи в известной системе определения местонахождения объектов, содержащей N блоков сигнализации, каждый из которых включает генератор, преобразователь и передатчик радиосигналов, М станций приема радиосигналов, каждая из которых включает приемник, согласно изобретению, блоки сигнализации установлены на подвижных объектах, а приемные станции снабжены блоком обнаружения, слежения и снятия кодовых посылок, блоком управления и установлены на опорных точках с определенными координатами.
На фиг. 1 представлена структурная схема системы определения местоположения подвижных объектов; на фиг. 2 вариант реализации блока сигнализации; на фиг. 3 вариант реализации диспетчерской станции; на фиг. 4 вариант реализации приемной станции, образующей контрольный пункт; на фиг. 5 вариант реализации станции отображения информации.
Система определения местоположения подвижных объектов содержит блоки сигнализации 1-1, 1-2, 1-N, установленные на автомобилях, приемные станции, образующие контрольные пункты 2-1, 2-2, 2-М, установленные стационарно в опорных точках с известными координатами, диспетчерскую станцию 3, станции отображения информации 4-1, 4-2, 4-К.
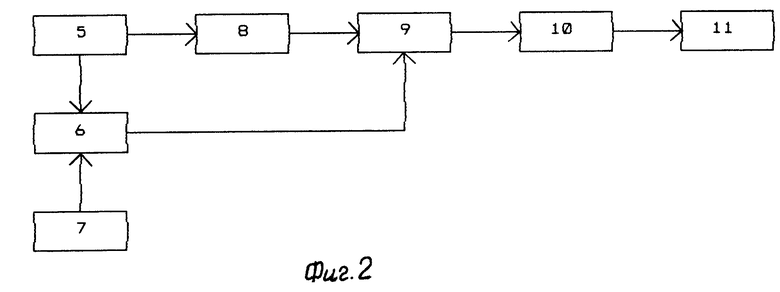
Каждый блок 1 сигнализации содержит задающий генератор 5, блок 6 формирования псевдослучайной последовательности (ПСП) и кодирования, датчики 7 сигнализации, синтезатор 8 несущей частоты, модулятор 9, усилитель 10 мощности, антеннофидерное устройство 11.
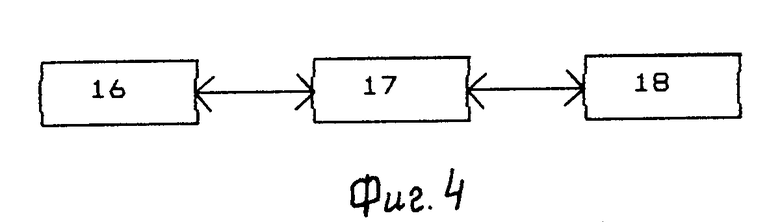
Диспетчерская станция 3 содержит антенно-фидерное устройство 16 связи, аппаратуру 17 связи, блок 18 управления.
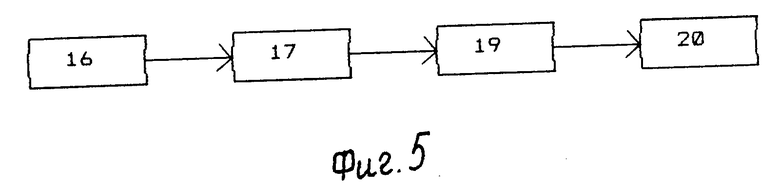
Каждая станция отображения информации 4 содержит антенно-фидерное устройство 16, связи, аппаратуру 17 связи, блок 19 сопряжения, персональную электронно-вычислительную машину (ПЭВМ) 20.
Данная система основана на разностно-дальномерном методе с применением непрерывно излучаемых фазоманипулированных сигналов с большой базой, разнесенными в пространстве приемными пунктами и с единой для системы шкалой времени.
Работу системы определения местонахождения подвижных объектов рассмотрим на примере контроля за перемещением автотранспорта.
Перед началом движения автомобиля включается установленный на нем блок сигнализации 1, при этом задающий генератор 5 вырабатывает опорную частоту для синтезатора несущей частоты, соединенного с модулятором 9, на другой вход которого поступает синхронизированный с частотой задающего генератора 5 сигнал с блока формирования ПСП и кодирования 6. Блок 6 формирования ПСП и кодирования модулирует вырабатываемый в нем ПСП сигнал индивидуальным номером и кодом состояния датчиков 7. С выхода модулятора 9 фазоманипулированная несущая поступает на усилитель 10 мощности, выход которого соединен с антенно-фидерным устройством 11, излучающим сигнал в эфир.
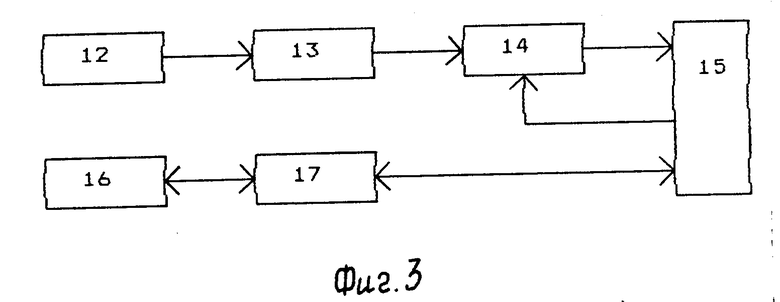
Сигнал с блока сигнализации 1 принимается антенно-фидерными устройствами 12 контрольных пунктов 2-1, 2-2.2-М, передается в приемники 13, в которых производится фильтрация от внеполосных помех, усиление и перенос фазоманипулированного сигнала в низкочастотную область. С выхода каждого приемника 13 сигнал поступает в блок 14 обнаружения, слежения и снятия кодовых посылок, в котором определяется задержка распространения радиосигнала относительно системой шкалы времени в мультиплексном режиме путем синхронизации блока 14 обнаружения, слежения, и снятия кодовых посылок от блока 15 управления. С выхода блока 14 обнаружения, слежения и снятия кодовых посылок информация о задержке распространения радиосигнала, индивидуальный номер блока сигнализации и код состояния датчиков поступает в блок 15 управления. Блок управления в дуплексном режиме осуществляет прием синхронизирующих и управляющих сигналов диспетчерской станции 3, передачу накопленной информации согласно протоколу работы синхронной дуплексной сети радиообмена между контрольными пунктами 2 и диспетчерской станцией 3 путем соединения с аппаратурой 17 связи, которая соединена с антенно-фидерным устройством 16 связи.
Блок 18 управления диспетчерской станции осуществляет управление протоколом работы синхронной дуплексной сети радиообмена между контрольными пунктами 2 и диспетчерской станцией 3, содержит в себе ведущий генератор частоты единой системной шкалы времени, накапливает и передает информацию, полученную от всех контрольных пунктов 2 путем соединения с аппаратурой 17 связи, которая соединена с антенно-фидерным устройством 16 связи.
Станция отображения информации 4 принимает передаваемую диспетчерской станцией 3, накопленную от всех контрольных пунктов 2 информацию на антенно-фидерное устройство 16 связи, соединенное с аппаратурой 17 связи, выход которой через блок 19 сопряжения соединен с ПЭВМ 20. В ПЭВМ 20 осуществляются вычисления координат блоков 1 сигнализации по переданным диспетчерской станцией 3 задержкам распространения радиосигнала и известным координатам контрольных пунктов 2. Вычисленные координаты накладываются на введенную в ПЭВМ 20 карту города и отображаются на дисплее ПЭВМ в реальном времени совместно с дополнительной информацией, связанной с индивидуальным номером блока сигнализации и состоянием датчиков.
Источники информации
1. Балашов А.И. и др. Международная космическая радиотехническая система обнаружена терпящих бедствие. М. Радио и связь, 1987, с. 64.
2. Так же, с. 54.
3. Там же, с. 71.
4. Там же, с. 77.
5. Крохин В.В. Информационно-управояющие космические радиолинии, ч. 2. М. НИИЭИР, 1993, с. 52.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2572829C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2302698C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ И СЛЕЖЕНИЯ ЗА УДАЛЕННЫМИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2290763C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2000 |
|
RU2172524C1 |
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ОБЪЕКТОВ НЕДВИЖИМОСТИ, ТРАНСПОРТНЫХ СРЕДСТВ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2216463C1 |
| РЕГИОНАЛЬНАЯ СИГНАЛЬНАЯ ПРОТИВОУГОННАЯ СИСТЕМА | 2003 |
|
RU2228861C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО МОНИТОРИНГА СМЕЩЕНИЙ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ | 2012 |
|
RU2496124C1 |
| КОМПЛЕКС БОРТОВЫХ СРЕДСТВ ЦИФРОВОЙ СВЯЗИ | 2020 |
|
RU2742947C1 |
Изобретение относится к радиотехнике и может использоваться для автоматического определения местонахождения подвижных объектов. Система определения местонахождения подвижных объектов содержит блоки сигнализации 1-1, 1-2, 1-N, установленные на автомобилях, приемные станции, образующие контрольные пункты 2-1, 2-2, 2-М установленные стационарно в опорных точках с известными координатами, диспетчерскую станцию 3, станции отображения информации 4-1, 4-2, 4-К. Каждый блок сигнализации 1 содержит задающий генератор 5, блок формирования псевдослучайной последовательности (ПСП) и кодирования 6, датчики сигнализации 7, синтезатор несущей частоты 8, модулятор 9, усилитель мощности 10, антенно-фидерное устройство 11. Диспетчерская станция 3 содержит антенно-фидерное устройство связи 16, аппаратуру связи 17, блок управления 18. Каждая станция отображения информации 4 содержит антенно-фидерное устройство связи 16, аппаратуру связи 17, блок сопряжения 19, персональную электронно-вычислительную машину (ПЭВМ) 20. Данная система основана на разностно-дальномерном методе с применением непрерывно излучаемых фазоманипулированных сигналов с большой базой, разнесенными в пространстве приемными пунктами и с единой для системы шкалой времени. 4 з.п.ф-лы, 5 ил.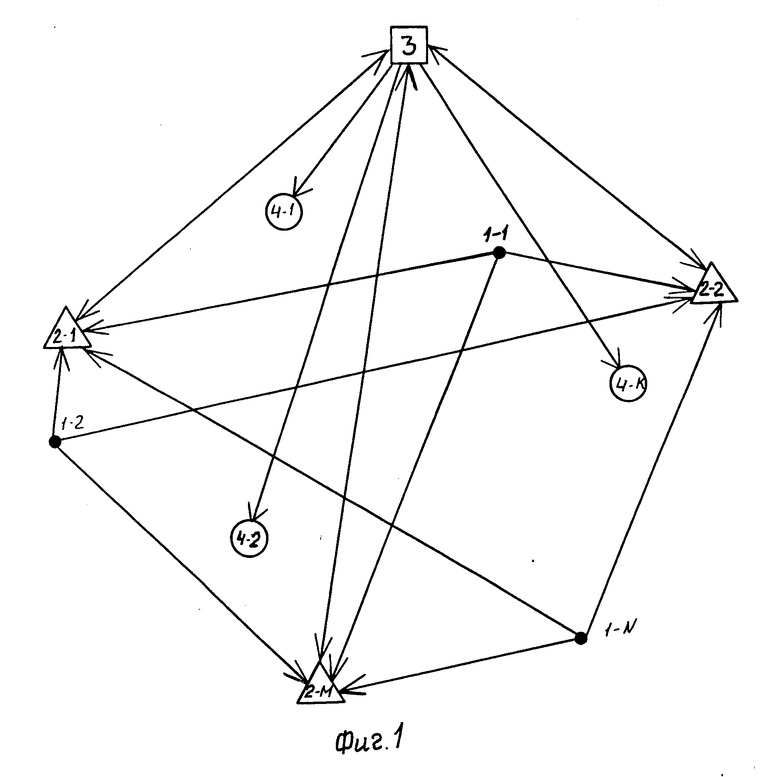
| Балашов А.И | |||
| и др | |||
| Международная космическая система обнаружения терпящих бедствий | |||
| - М.: Радио и связь, 1987, с.64. |

