Изобретение относится к общему машиностроению, а именно к конструкции механизма обрубки проволоки применительно к пружинонавивочным автоматам. Известно устройство для обрубки проволоки пружинонавивочного автомата /см. патент США N 3608591, кл. B 21 F 35/00, 1971/, содержащее ножницы, состоящие из подвижной и неподвижной частей, последняя из которых закреплена на корпусе, а подвижная кинематически связана с приводом, обеспечивающим ее перемещение в момент окончания процесса навивки пружины. Известное устройство энергоемко, не обеспечивает качественной рубки проволоки ввиду того, что проволока не обладает стабильным положением в момент резки.
Известен также механизм обрубки проволоки пружинонавивочного автомата /см. авт. свид. N 211508, кл. 21 F 35/00, 1965/, содержащий корпус, ножницы, состоящие из неподвижного и подвижного элементов с режущими участками, привод, кинематически связанный с подвижным элементом. Это техническое решение, как наиболее близкое по решаемой задаче, принято в качестве прототипа.
Недостатком прототипа является сложность конструкции и, как следствие, недостаточная его надежность, обусловленная применением подвижных ножей. Кроме того, известное устройство затрачивает на резку проволоки большое количество энергии, что обусловлено применением статического способа резки.
Целью настоящего изобретения является упрощение конструкции и повышение качества среза проволоки при одновременном снижении энергетических затрат на процесс рубки.
На фиг. 1 изображена кинематическая схема механизма обрубки проволоки пружинонавивочного автомата.
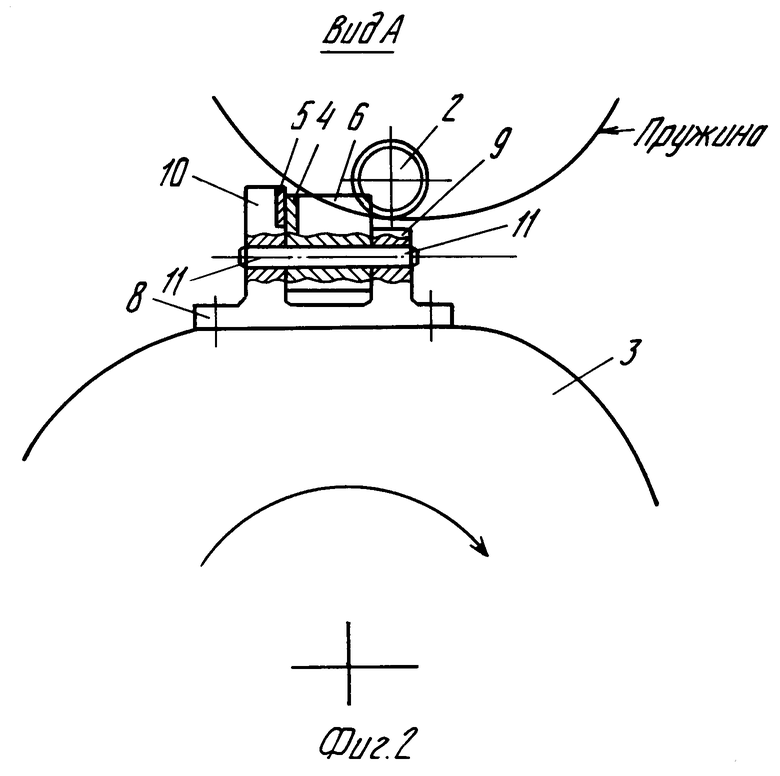
На фиг. 2 вид А на фиг. 1.
Механизм обрубки проволоки пружинонавивочного автомата состоит из корпуса 1 со свободным вращающимся валом 2, из маховика 3 с приводом / на фиг. 1 не показан/, связанным с приводом подачи проволоки для согласования линейной скорости подачи проволоки с режимом ее рубки.
На маховике 3 размещены ножницы, состоящие из подвижного и неподвижного элементов с режущими участками 4 и 5 расположенными в плоскости, перпендикулярной плоскости вращения маховика. Подвижный элемент выполнен в виде двуплечего рычага 6 с размещенным на одном плече режущим участком 4, на другом плече рычага 6 выполнен сферический упор 7 для взаимодействия с валом 2. Рычаг 6 подпружинен относительно неподвижного элемента ножниц.
Неподвижный элемент согласно фиг. 2 представляет собой основание 8, закрепленное на поверхности маховика 3 /фиг. 1/ и выполненное с двумя параллельными стенками 9 и 10, имеющими соосное отверстие, причем на стенке 10 выполнен режущий участок 5. Двуплечий рычаг 6 расположен между упомянутыми стенками 9 и 10 на оси 11, размещенной в отверстиях стенок. При этом на рычаге 6 выполнен сферический упор 7 для взаимодействия со свободно вращающимся валом 2.
На поверхности двуплечего рычага 6 выполнен режущий участок 4 для взаимодействия с режущим участком 5.
Режущие участки 4 и 5 выполнены путем наплавления инструментальной стали на элементы ножниц из конструкционной стали.
Механизм обрубки проволоки работает следующим образом.
После формирования пружины последний ее виток оказывается между режущими участками 4 и 5 ножниц в момент, когда упор 7 двуплечего рычага 6 расположен перед валом 2. Маховик 3, обладая кинетической энергией наталкивает упор 7 на поверхность вала 2, что вызывает перемещение двуплечего рычага 6 вокруг оси 11, последний в свою очередь перемещает режущий участок 4 относительно режущего участка 5 и тем самым перерубает проволоку.
После окончания процесса рубки пружина отводит рычаг 6 в исходное положение, это становится возможным только тогда, когда упор 7 выходит из взаимодействия с валом 2.
Привод подачи проволоки на участок изготовления пружины и далее на участок рубки кинематически связан с приводом вращения маховика, приводящим в действие ножницы. Эта кинематическая связь может быть выполнена как механической, так и электрической или гидравлической, причем рабочий цикл привода подачи проволоки будет равен свободному ходу маховика и только в конце цикла ножницы, закрепленные на маховике 3, занимают строгое положение для рубки проволоки.
Процесс рубки отличается от разрезания проволоки известных пружинонавивочных автоматов использованием кинетической энергии маховика.
Применение предложенного механизма рубки проволоки пружинонавивочного автомата позволяет повысить качество и стабильность режима рубки проволоки, исключает необходимость перестраивать пружинонавивочный автомат в зависимости от толщины проволоки, а также позволяет значительно снизить энергетические затраты и упростить конструкцию автомата.
Использование: пружиннонавивочные автоматы. Сущность изобретения: механизм обрубки проволоки пружиннонавивочного автомата содержит корпус, ножницы, состоящие из неподвижного и подвижного элементов с режущими участками. Неподвижный элемент представляет собой основание с двумя параллельными стенками, между которыми на установленной в них оси расположен подвижной элемент в виде двуплечего рычага. На одной из стенок и взаимодействующей с ней части двуплечего рычага выполнены режущие участки, а другой конец двуплечего рычага имеет сферический упор для взаимодействия со свободно вращающимся валом. Режущий участок каждого элемента ножа выполнен путем наплавки инструментальной стали на элементы ножниц из конструкционной стали. 2 з.п.ф-лы, 2 ил.
| SU, авторское свидетельство, 211508, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
