Изобретение относится к области управления движением на железных дорогах и может быть использовано в системах автоматической локомотивной сигнализации при интервальном регулировании движения поездов для уточнения их местоположения.
Наиболее близким по технической сути аналогом, принятым в качестве прототипа предлагаемого изобретения, является система для определения местоположения поезда. Устройство-прототип содержит пассивный приемоответчик, установленный на путевом ориентире, локомотивный опросный узел (сканер), включающий радиопередатчик запросного сигнала, связанный через антенный переключатель с приемопередающей антенной, и радиоприемник ответного сигнала, подключенный к второму выходу антенного переключателя, а также измеритель скорости и блок коррекции местоположения (включающий интегратор скорости), подключенный к выходу обнаружения i-го путевого ориентира сканера.
Известное устройство позволяет откорректировать местоположение поезда путем замены в момент прохождения ориентира счисленной координаты местоположения поезда на координату местоположения ориентира. Момент прохождения ориентира определяется по факту его обнаружения. При этом блок коррекции местоположения реализует следующий алгоритм:
где X(t) текущая координата местоположения поезда;
v скорость движения поезда;
X ориентира;
ориентира;
t1i момент прохождения (обнаружения) i-го ориентира, зафиксированный сканером.
При заданных удалении ориентира от железнодорожного полотна, ширине диаграммы направленности антенны и параметрах излучения между логикой обнаружения (по числу отраженных от ориентира импульсов), обеспечивающей небольшую точность фиксации момента прохождения ориентира (оптимальной логикой), и скоростью движения поезда существует определенная зависимость. Чем меньше скорость движения поезда, тем по большому числу отраженных импульсов следует принимать решение об обнаружении ориентира. И, наоборот, чем больше скорость движения поезда, тем меньше должен быть временной интервал (отсчитываемый от момента фиксации первого отраженного импульса), по истечении которого принимается решение о прохождении ориентира. Поскольку скорость движения поезда измеряется с ошибкой, то используемая логика обнаружения ориентира чаще всего оказывается неоптимальной. Тем самым уменьшается точность фиксации момента прохождения ориентира и, следовательно, эффективность коррекции.
Кроме этого, с течением времени ошибка определения местоположения поезда накапливается и к моменту коррекции по следующему ориентиру может достичь недопустимой величины. Поскольку ошибка счисления пройденного расстояния обусловлена ошибкой измерителя скорости (координата местоположения определяется путем интегрирования величины скорости), то существует дополнительная возможность уточнения местоположения поезда путем коррекции показаний измерителя скорости.
Задачей изобретения является повышение точности определения местоположения поезда путем коррекции показаний измерителя скорости по данным обнаружения ориентира двумя сканерами, разнесенными по направлению движения поезда на фиксированное расстояние.
Выбор структурной схемы предлагаемой системы для определения местоположения поезда основан на следующих предпосылках.
На заданном удалении поезда от ориентира (определяемом возможными ошибками счисления координаты местоположения поезда по информации измерителя скорости) осуществляется включение первого сканера, расположенного в головной части поезда. Учитывая возможные ошибки счисления координаты местоположения поезда по правилу "трех сигм", выражение для определения координаты X
X
σxi среднеквадратическая ошибка определения местоположения поезда к моменты i-го включения первого сканера.
После включения первого сканера при накоплении определенного числа отраженных импульсов в соответствии с логикой "К из М" принимается решение об обнаружении ориентира. В момент обнаружения ориентира осуществляется коррекция местоположения поезда путем замены счисленной координаты местоположения поезда на координату X
Через заданный интервал времени осуществляются включение второго сканера, отстоящего от первого сканера по направлению движения поезда на фиксированное расстояние, и обнаружение ориентира вторым сканером. По результату измерения временного интервала, начало и конец которого фиксируются моментами обнаружения ориентира двумя сканерами, и известному расстоянию между сканерами определяется вводимая в выходные показания измерителя скорости корректирующая поправка в соответствии с правилом
где 
V скорость движения поезда;
Vи скорость движения поезда, измеренная измерителем скорости;
L расстояние между сканерами;
t
При этом обеспечивается высокая точность оценивания истинной скорости движения поезда (и, следовательно, высокая эффективность коррекции скорости и высокая точность определения местоположения поезда), поскольку, как указывалось ранее, в измерение временного интервала Δti, являющееся разностью двух измерений (результатов фиксации моментов прохождения ориентира двумя сканерами), не входит (в отличие от случая коррекции местоположения поезда в момент прохождения ориентира, фиксируемый по факту его обнаружения одним сканером) ошибка, обусловленная незнанием истинной скорости движения поезда. Используя терминологию теории ошибок измерения, можно сказать, что в данном случае указанная ошибка является систематической ошибкой, которая исключается путем использования разности двух единичных результатов измерения.
Сущность предлагаемого изобретения заключается в том, что в систему для определения местоположения поезда, содержащую пассивный приемоответчик, установленный на путевом ориентире, и первый сканер, установленный на локомотиве и включающий радиопередатчик запросного сигнала, связанный через антенный переключатель с приемопередающей антенной, и радиоприемник ответного сигнала, подключенный к второму выходу антенного переключателя, второй вход которого соединен с выходом приемопередающей антенны, а также измеритель скорости и блок коррекции местоположения, подключенный к выходу обнаружения i-го путевого ориентира первого сканера, дополнительно введены второй сканер, установленный по направлению движения поезда на фиксированном расстоянии от первого сканера, блок управления, таймер и блок коррекции скорости. При этом первый вход блока коррекции скорости подключен к выходу измерителя скорости, третий вход блока коррекции скорости подключен к выходу таймера, а выход к второму входу блока коррекции местоположения, третий вход которого подключен к первому выходу блока управления, первый вход которого подключен к выходу блока коррекции местоположения, который является выходом системы. Выход обнаружения i-го путевого ориентира второго сканера соединен с вторыми входами блока коррекции скорости и таймера и третьим входом блока управления, а выход обнаружения i-го путевого ориентира первого сканера подключен к первому входу таймера и второму входу блока управления, второй и третий выходы которого соединены с первыми входами включения-выключения соответственно первого и второго сканеров, вторые входы которых подключены к четвертому и пятому выходам блока управления соответственно.
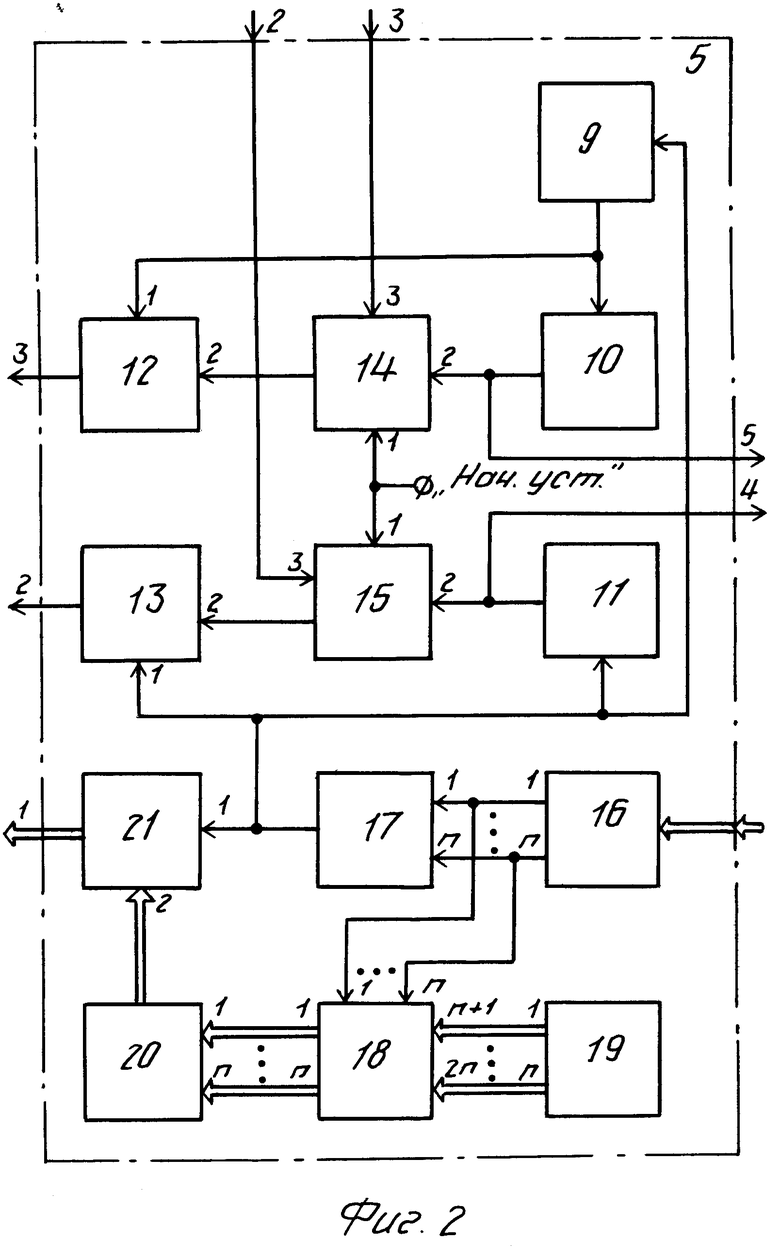
Блок управления реализован по схеме, содержащей три линии задержки, два триггера, четыре логических элемента ИЛИ, регистр, дешифратор, блок логических элементов И и блок регистров, выходы с 1-го по n-й которого соединены соответственно с входами с (n + 1)-го по 2n-й блока логических элементов И, выходы с 1-го по n-й которого соединены с соответствующими входами четвертого логического элемента ИЛИ, выход которого соединен с вторым входом регистра, выход которого является первым выходом блока управления, первым входом которого является вход дешифратора, выходы с 1-го по n-й которого соединены с соответствующими входами блока логических элементов И и третьего логического элемента ИЛИ, выход которого соединен с входом записи регистра, единичным входом второго триггера и входами третьей линии задержки и первой линии задержки, выход которой соединен с единичным входом первого триггера и входом второй линии задержки, выход которой соединен с вторым входом первого логического элемента ИЛИ, первый вход и выход которого соединены соответственно с шиной "начальная установка" и нулевым входом первого триггера, выход которого является третьим выходом блока управления, вторым выходом которого является выход второго триггера, нулевой вход которого соединен с выходом второго логического элемента ИЛИ, первый и второй входы которого соединены соответственно с шиной "начальная установка" и выходом третьей линии задержки, выходы второй и третьей линий задержки являются соответственно пятым и четвертым выходами блока управления, вторым и третьим входами которого являются третьи входы соответственно второго и первого логического элемента ИЛИ.
При этом каждый из двух сканеров дополнительно содержит блок обработки пачки импульсов и синхронизатор, вход которого является входом включения-выключения сканера, а выходы синхронизатора подключены соответственно к входу радиопередатчика запросного сигнала, входу управления антенного переключателя и первому входу блока обработки пачки импульсов, второй вход которого подключен к радиоприемнику ответного сигнала, выход блока обработки пачки импульсов является выходом обнаружения i-го путевого ориентира сканера, а третий вход вторым входом сканера.
При этом блок обработки пачки импульсов реализован на основе двух счетчиков, порогового блока, стробирующего каскада, дешифратора, логических элементов И и ИЛИ, схемы сравнения и регистра.
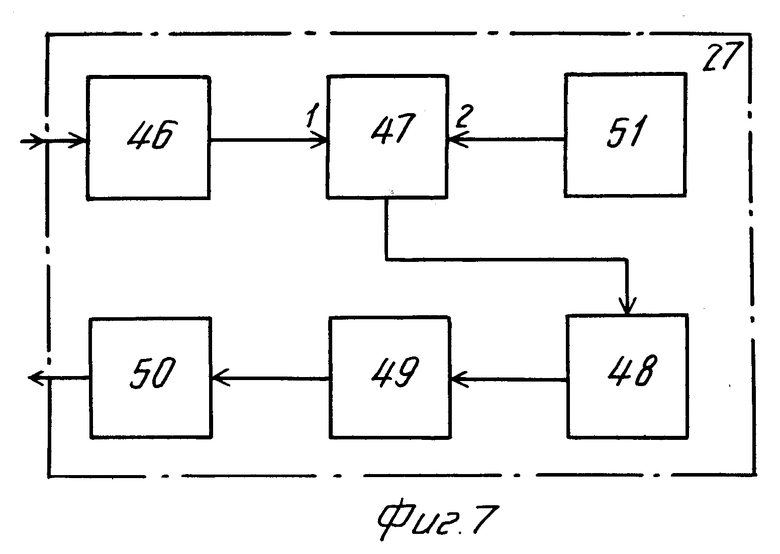
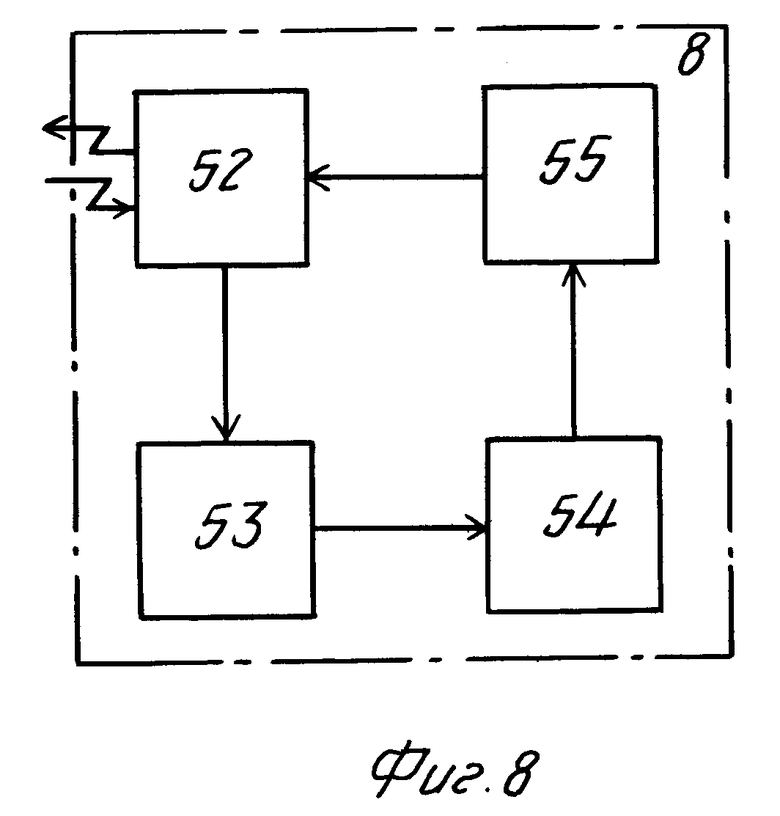
На фиг. 1 представлена функциональная схема системы; на фиг. 2 схема блока управления; на фиг. 3 схема сканера; на фиг. 4 схема синхронизатора; на фиг. 5 схема блока обработки пачки импульсов; на фиг. 6 схема радиопередатчика запросного сигнала; на фиг. 7 схема радиоприемника ответного сигнала; на фиг. 8 схема пассивного приемоответчика.
Система для определения местоположения поезда содержит n путевых ориентиров с известными координатами  разделяющих перегон на n-1 участков, и локомотивный узел, который по мере продвижения поезд осуществляет связь по радиоканалу с очередным i-м пассивным приемоответчиком, установленным на соответствующем ориентире, для уточнения местоположения поезда.
разделяющих перегон на n-1 участков, и локомотивный узел, который по мере продвижения поезд осуществляет связь по радиоканалу с очередным i-м пассивным приемоответчиком, установленным на соответствующем ориентире, для уточнения местоположения поезда.
В состав локомотивного узла (см. фиг. 1) входят измеритель 1 скорости, выход которого соединен с первым входом блока 2 коррекции скорости, третий вход и выход которого соединены соответственно с выходом таймера 3 и вторым входом блока 4 коррекции местоположения, третий вход и выход которого, являющийся выходом системы, соединены с первыми выходом и входом блока 5 управления, второй и третий выходы которого соединены с первыми входами включения-выключения соответственно первого и второго сканеров 6 и 7, которые осуществляют радиосвязь с пассивным приемоответчиком 8, размещенным на i-м путевом ориентире. Выход обнаружения i-го путевого ориентира первого сканера 6 подключен к первым входам таймера 3 и блока 4 коррекции местоположения и второму входу блока 5 управления, третий вход которого подключен к выходу обнаружения i-го путевого ориентира второго сканера 7, который связан с вторыми входами блока 2 коррекции скорости и таймера 3. При этом вторые входы сканеров 6 и 7 подключены соответственно к четвертому и пятому выходам блока 5 управления.
Измеритель 1 скорости обеспечивает определение скорости движения поезда и может быть построен на основе использования эффекта Доплера.
Блок 2 коррекции скорости выполнен реализующим алгоритм ввода в выходные показания измерителя 1 скорости корректирующей поправки, зафиксированной в момент прохождения (обнаружения) известного ориентира в соответствии с правилом (3).
Таймер 3 осуществляет измерение временного интервала.
Блок 4 коррекции местоположения выполнен реализующим алгоритм замены в момент прохождения известного ориентира счисленной координаты местоположения поезда на координату местоположения ориентира в соответствии с правилом (1).
Блок 5 управления (см. фиг. 2) предназначен для задания режимов (включить-выключить) работы сканеров 6 и 7 и выдачи в блок 4 коррекции местоположения координаты X
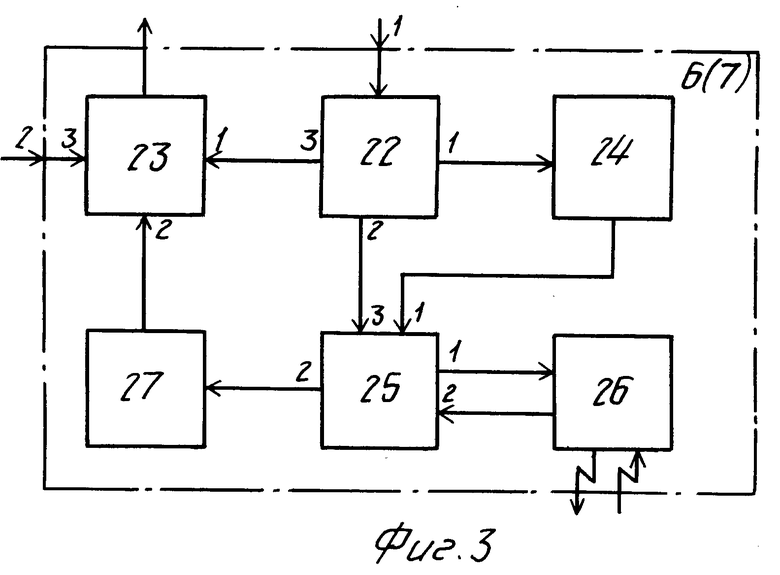
Первый и второй сканеры 6 и 7 установлены на фиксированном по направлению движения поезда расстоянии друг от друга, предназначены для фиксации момента прохождения i-го путевого ориентира по факту его обнаружения и имеют аналогичную структуру (см. фиг. 3). Входом включения-выключения сканера 6(7) является вход синхронизатора 22, выходы которого подключены соответственно к входу радиопередатчика 24 запорного сигнала, входу управления антенного переключателя 25 и первому входу блока 23 обработки пачки импульсов, первый вход антенного переключателя 25 соединен с радиопередатчиком 24, а его второй вход и первый выход подключены к приемопередающей антенне 26. Выход блока 23 обработки пачки импульсов является выходом обнаружения i-го ориентира сканера 6(7), третий вход блока 23 является вторым входом сканера, а его второй вход подключен к выходу радиоприемника 27 ответного сигнала, вход которого соединен с вторым выходом антенного переключателя 25.
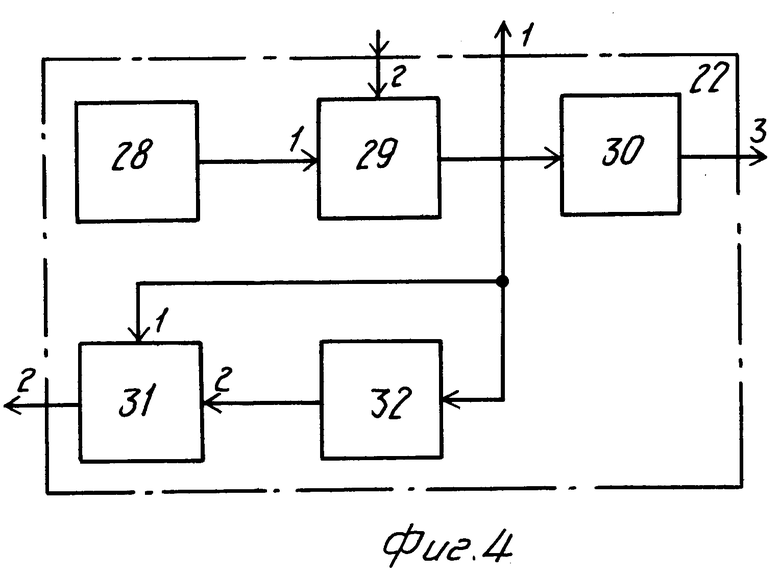
Синхронизатор 22 (см. фиг. 4) содержит генератор 28 тактовых импульсов, подключенный к первому входу логической схемы 29 И, второй вход которой является входом синхронизатора 22, а выход подключен к радиопередатчику 24 запорного сигнала, генератору 30 стробирующих импульсов, единичному входу триггера 31 непосредственно, а к его нулевому входу через линию 32 задержки. Выход триггера 31 подключен к входу управления антенного переключателя 25, а выход генератора 30 стробирующих импульсов служит третьим выходом синхронизатора 22 и подключен к первому входу блока 23 обработки пачки импульсов.
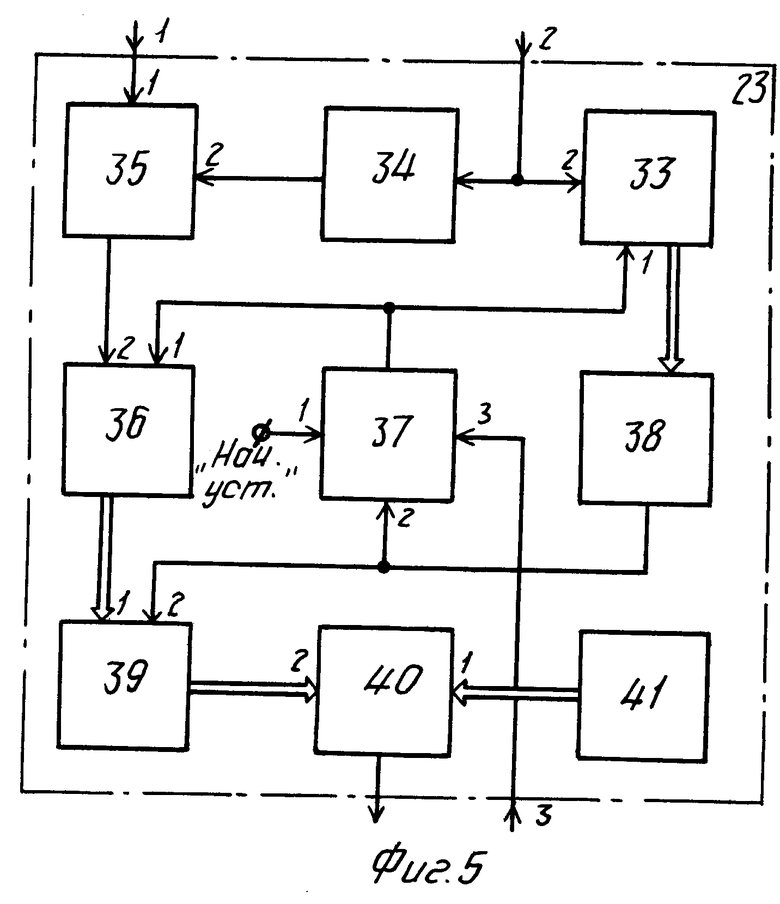
Блок 23 обработки пачки импульсов (см. фиг. 5) предназначен для выработки сигнала обнаружения ориентира в соответствии с логикой "К из М". При этом вторым входом блока 23, подключенным к выходу радиоприемника 27 ответного сигнала, являются второй вход первого счетчика 33 и вход порогового блока 34, выход которого соединен с вторым входом стробирующего каскада 35, первый вход которого является первым входом блока 23 обработки пачки импульсов, а выход соединен с вторым входом второго счетчика 36. Выходы сброса счетчиков 33 и 36 подключены к выходу логического элемента 37 ИЛИ, первый вход которого подключен к шине "начальная установка", а третий вход является третьим входом блока 23 обработки пачки импульсов. Выход первого счетчика 33 подключен к дешифратору 38, выход которого соединен с вторыми входами логического элемента 37 ИЛИ и логического элемента 39 И, первый вход которого подключен к выходу второго счетчика 36. Выход логического элемента 39 И подключен к второму входу схемы 40 сравнения, первый вход которой соединен с регистром 41, а выход является выходом блока 23 (выходом обнаружения i-го путевого ориентира сканера 6 и 7).
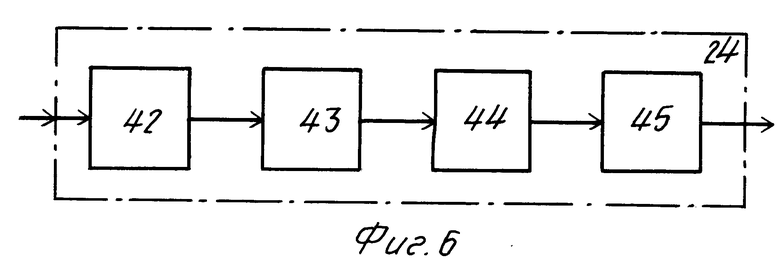
Радиопередатчик 24 запросного сигнала (см. фиг. 6) осуществляет формирование высокочастотных фазоманипулированных широкополосных импульсов. Вход радиопередатчика 24, подключенный к первому выходу синхронизатору 22, является входом генератора 42 дельта-импульсов, выход которого через формирующую линию 43 и усилитель 44 мощности соединен с входом полосового фильтра 45, выход которого является выходом радиопередатчика 24 и подключен к первому входу антенного переключателя 25.
Радиоприемник 27 ответного сигнала (см. фиг. 7) предназначен для приема радиосигналов, сформированных пассивным приемоответчиком 8, размещенным на путевом ориентире. Входом радиоприемника 27 является вход усилителя 46 высокой частоты, выход которого соединен с первым входом смесителя 47, выход которого через радиочастотный согласованный фильтр 48 и усилитель 49 промежуточной частоты соединен с входом амплитудного детектора 50, выход которого является выходом радиоприемника 27. Выход гетеродина 51 соединен с вторым входом смесителя 47.
Пассивный приемоответчик 8 (см. фиг. 8) содержит приемопередающую антенну 52, которая подключена к радиочастотному согласованному фильтру 53 запросного сигнала, осуществляющему "свертку" запросного сигнала. Фильтр 53 через линию 54 задержки связан с радиочастотным фильтром 55 ответного сигнала, который формирует фазоманипулированный широкополосный сигнал и подключен к антенне 52. Фильтры 53 и 55 выполнены на элементах ПАВ (преобразующих радиосигнал в поверхностную акустическую волну и обратно).
Система для определения местоположения поезда функционирует следующим образом.
В исходном состоянии в блоке 5 управления с шины "начальная установка" через логические элементы 14 и 15 ИЛИ на вторые (нулевые) входы триггеров 12 и 13 подан сигнал. При этом на прямых выходах триггеров сигналы отсутствуют, что соответствует выключенному состоянию сканеров 7 и 6. В исходном состоянии также обнулен регистр 21, а в блок 19 регистров записаны коды координат X
Источниками информации о параметрах движения поезда (о скорости движения поезда и координате его местоположения) являются измеритель 1 скорости и блок 4 коррекции местоположения. Текущая координата X(t) местоположения поезда с блока 4 поступает на вход дешифратора 16 блока 5 управления. При достижении координатной X(t) значения X
При поступлении с триггера 13 на элемент 29 И синхронизатора 22 разрешающего сигнала тактовые импульсы с генератора 28 начинают поступать на радиопередатчик 24 запросного сигнала и генератор 30, преобразующий их в стробирующие импульсы. Тактовые импульсы с генератора 28 поступает также на первый (единичный) и (с определенной задержкой благодаря линии 32 задержки) второй (нулевой) входы триггера 31. Тем самым осуществляется формирование триггером 31 сигнала, управляющего антенным переключателем 25, обеспечивая поочередную работу сканера на излучение и прием.
Поступающие с синхронизатора 22 тактовые импульсы в генераторе 42 дельта-импульсов преобразуются в короткие импульсы, которые возбуждают формирующую линию 43. Высокочастотный фазоманипулированный широкополосный радиосигнал усиливается усилителем 44 мощности и через полосовой фильтр 45 поступает в антенный переключатель 25 и далее через приемопередающую антенну 26 излучается в направлении расположения ориентира.
Установленный на ориентире пассивный приемоответчик 8 обеспечивает формирование ответного сигнала. При этом запросный сигнал от сканера принимается приемопередающей антенной 52, "свертывается" радиочастотным согласованным фильтром 53 запросного сигнала, задерживается линией 54 задержки и возбуждает радиочастотный согласованный фильтр 55 ответного сигнала, формирующий фазоманипулированный широкополосный сигнал. Согласованные фильтры 53 и 55 выполнены на элементах ПАВ (преобразукющих радиосигнал в поверхностную акустическую волну и обратно).
Ответные импульсы, сформированные пассивным приемоответчиком 8, через антенный переключатель 25 поступают в радиоприемник 27 ответного сигнала. В радиоприемнике 27 принятый радиосигнал высокой частоты усиливается усилителем 46 высокой частоты и с помощью гетеродина 51 и смесителя 47 преобразуется в радиосигнал промежуточной частоты. Этот радиосигнал "свертывается" радиочастотным согласованным фильтром 48, отклик которого является импульсным радиосигналом, который усиливается усилителем 49 промежуточной частоты и детектируется амплитудным детектором 50. Далее сигнал поступает в блок 23 обработки пачки импульсов.
В блоке 23 отраженные от пассивного приемоответчика 8 импульсы подсчитываются счетчиком 33. Одновременно эти же импульсы поступают в пороговый блок 34, где амплитуда сопоставляется с заданным уровнем. Прошедшие через пороговый блок 34 импульсы поступают в стробирующий каскад 35, на другой выход которого с синхронизатора 22 поступают стробирующие импульсы. Отраженные импульсы, оказавшиеся в пределах заданных стробов, поступают в счетчик 36, осуществляющий их подсчет. При накоплении в счетчике 33 М импульсов на выходе дешифратора 38 появляется сигнал, обеспечивающий прохождение через логическую схему 39 И на схему 40 сравнения содержимого счетчика 36. На другой вход схемы 40 сравнения поступает хранящийся в регистре 41 код К. При выполнении логики "К из М", то есть в случае, когда содержимое счетчика 36 окажется ≥ К, на выходе схемы 40 сравнения появится сигнал, свидетельствующий об обнаружении ориентира. Счетчики 33 и 36 сбрасываются сигналом с выхода дешифратора 38 или сигналом выключения сканера, поступающим с блока 5 управления, тем самым осуществляется подготовка блока к обнаружению следующего ориентира.
В случае обнаружения ориентира в соответствии с логикой "К отраженных импульсов из М" на выходе первого сканера 6 появляется сигнал обнаружения, который поступает в таймер 3 для его запуска и в блок 4 коррекции местоположения. По истечении времени, отводимого на обнаружение ориентира первым сканером 6, или по сигналу обнаружения, поступающему в блок 5 со сканера 6, сигнал с второго выхода блока 5 снимается, и сканер 6 выключается. Сигнал с четвертого выхода блока 5, поступающий в сканер 6, обеспечивает подготовку блока 23 обработки пачки импульсов к обнаружению следующего ориентира.
По сигналу обнаружения ориентира первым сканером 6 в блоке 4 осуществляется коррекция местоположения поезда. Блок 4 выполнен реализующим алгоритм замены в момент прохождения известного ориентира счисленной координаты местоположения поезда на координату местоположения ориентира в соответствии с правилом (1).
Через заданный интервал времени от момента включения первого сканера 6 включается второй сканер 7, удаленный от первого сканера 6 по направлению движения поезда на фиксированное расстояние. Режимы работы второго сканера 7 задаются сигналом с прямого выхода триггера 12. Включение сканера 7 осуществляется сигналом с выхода дешифратора 16, поданным с задержкой (определяемой линией 9 задержки) на первый (единичный) вход триггера 12, а выключение сканера 7 тем же сигналом, поданным на второй (нулевой) вход триггера 12 с дополнительной задержкой, определяемой линией 10 задержки, либо по сигналу обнаружения текущего ориентира, поступающему со сканера 7. По истечении времени, отводимого на обнаружение ориентира вторым сканером 7, или по сигналу обнаружения, поступающему в блок 5 со сканера 7, сигнал с третьего выхода блока 5 снимается, и сканер 7 выключается. Сигнал с пятого выхода блока 5, поступающий в сканер 7, обеспечивает подготовку бока 23 обработки пачки импульсов к обнаружению следующего ориентира.
Второй сканер 7 также осуществляет обнаружение ориентира в соответствии с логикой "К из М" и при выполнении этой логики выдает сигнал обнаружения, который поступает в таймер 3 для его останова и в блок 2 коррекции скорости. Измеренное таймером 3 значение временного интервала Δti= t ориентира первым и вторым сканерами соответственно, поступает в блок 2.
ориентира первым и вторым сканерами соответственно, поступает в блок 2.
По сигналу обнаружения ориентира вторым сканером 7 в блоке 2 осуществляется коррекция скорости движения поезда. Блок 2 выполнен реализующим алгоритм ввода в выходные показания измерителя 1 скорости корректирующей поправки, зафиксированной в момент прохождения (обнаружения) известного ориентира в соответствии с правилом (3). Откорректированное значение скорости движения поезда с блока 2 поступает в блок 4, где в соответствии с выражением (1) определяется текущая координата Х(t) местоположения поезда. Во внешние системы координата X(t) поступает с выхода блока 4.
Техническим преимуществом предлагаемой системы перед устройством-прототипом является то, что обеспечивается повышение точности определения местоположения поезда путем коррекции скорости его движения. Указанный технический эффект от использования предлагаемой системы достигается тем, что обнаружение известного ориентира осуществляется последовательно во времени двумя сканерами, отстоящими друг от друга по направлению движения поезда на фиксированное расстояние. В момент прохождения ориентира, зафиксированный по факту его обнаружения первым сканером, осуществляется коррекция местоположения поезда путем замены счисленной координаты местоположения поезда на координату местоположения обнаруженного ориентира. В момент прохождения ориентира, зафиксированный по факту его обнаружения вторым сканером, определяется корректирующая поправка, которая вводится в выходные показания измерителя скорости. Корректирующая поправка определяется по результату измерения временного интервала, начало и конец которого фиксируются моментами обнаружения ориентира двумя сканерами, и известному расстоянию между сканерами.
Эффективность от использования предлагаемой системы подтверждается примером. Используем следующие исходные данные: скорость движения поезда v 360 км/ч=100 м/с; относительная погрешность измерения скорости δ 1% (соответствует доплеровскому измерителю); расстояние между сканерами L=200 м; расстояние между соседними ориентирами ΔXппо= 10 км; соотношение между флуктуационной σ
Так как δv1% то за время движения t=1,667 мин со скоростью v=360 км/ч накопленная ошибка счисления координаты местоположения поезда составит 3σхк 100,02 м. Тогда общая ошибка будет равна
Данная ошибка соответствует случаю определения местоположения поезда с использованием неоткорректированной скорости. Найдем теперь аналогичную ошибку, но для случая, когда введена коррекция скорости. Расстояние L=200 м поезд со скоростью v 360 км/ч проходит за время .
.
Этот временной интервал определяется путем фиксации моментов прохождения (обнаружения) ориентира разнесенными по направлению движения поезда двумя сканерами. При этом среднеквадратическая ошибка определения временного интервала Δt составит
Таким образом, истинное значение величины находится в диапазоне от Δt = 3σΔt до Δt = 3σΔt.
Оценим относительную погрешность коррекции скорости как
Так как δvк 0,426% то за время движения t 1,667 мин со скоростью v=360 км/ч накопленная ошибка счисления координаты местоположения поезда составит 3σxvк 42,608 м. Тогда общая ошибка будет равна
Таким образом, использование коррекции скорости движения поезда позволяет повысить точность определения местоположения поезда в К раз
Пользуясь представленными в материалах заявки сведениями, чертежами и используя известные материалы, комплектующие изделия и технологию, предлагаемую систему можно изготовить в производстве и использовать для определения местоположения поезда, что доказывает промышленную применимость предлагаемого объекта изобретения.
В соответствии с материалами заявки на предприятии был изготовлен опытный образец системы, испытания которого подтвердили достижение указанного в материалах технического эффекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЧИТЫВАНИЯ ИНФОРМАЦИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2083411C1 |
| УСТРОЙСТВО КОРРЕКТИРОВКИ ЛИНЕЙНОЙ КООРДИНАТЫ НАХОЖДЕНИЯ ПОЕЗДА | 2003 |
|
RU2248291C2 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2039365C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2170444C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1993 |
|
RU2092902C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
Использование: в области управления движением на железных дорогах и может быть использовано в системах автоматической локомотивной сигнализации при интервальном регулировании движения поездов для уточнения их местонахождения. Сущность изобретения заключается в том, что обнаружение известного путевого ориентира осуществляется последовательно во времени двумя сканерами 6 и 7, отстоящими друг от друга по направлению движения поезда на фиксированное расстояние. В момент прохождения ориентира, зафиксированный по факту его обнаружения первым сканером 6, в блоке 4 коррекции местоположения осуществляется коррекция местоположения поезда путем замены счисленной координаты местоположения поезда на координату местоположения обнаруженного ориентира. В момент прохождения ориентира, зафиксированный по факту его обнаружения вторым сканером 7, в блоке 2 коррекции скорости определяется корректирующая поправка, которая вводится в выходные показания измерителя 1 скорости. Корректирующая поправка определяется по результату измерения таймером 3 временного интервала, начало и конец которого фиксируются моментами обнаружения ориентира двумя сканерами, и известному расстоянию между сканерами. 2 з.п. ф-лы, 8 ил.
| Мур Б | |||
| Перспективная система управления движением поездов в Канаде | |||
| - Железные дороги мира, N 5, 1991, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
