Изобретение относится к области управления движением на железных дорогах и может быть использовано в системах автоведения поездов для уточнения их местоположения.
Известна система для определения местоположения поезда, содержащая пассивный приемоответчик, установленный на путевом ориентире, локомотивный опросный узел (сканер), включающий радиопередатчик запросного сигнала, связанный через антенный переключатель с приемопередающей антенной, и радиоприемник ответного сигнала, подключенный к второму выходу антенного переключателя, а также измеритель скорости и блок коррекции местоположения (включающий интегратор скорости), подключенный к выходу обнаружения i-го путевого ориентира сканера (см. “Железные дороги мира”, №5, 1991, с.22).
Известное устройство позволяет откорректировать местоположение поезда путем замены в момент прохождения ориентира счисленной координаты местоположения поезда на координату местоположения ориентира. Момент прохождения ориентира определяется по факту его обнаружения.
Наиболее близкой является система для определения местоположения поезда, содержащая пассивный приемоответчик, установленный на путевом ориентире, и первый сканер, установленный на локомотиве и включающий радиопередатчик запросного сигнала, выходом подключенный к первому входу антенного переключателя, первым выходом связанного с приемопередающей антенной, и радиоприемник ответного сигнала, подключенный к второму выходу антенного переключателя, второй вход которого соединен с выходом приемопередающей антенны, а также измеритель скорости и блок коррекции местоположения, подключенный к выходу обнаружения i-го из n путевых ориентиров первого сканера, второй сканер, установленный по направлению движения поезда на фиксированном расстоянии от первого сканера, блок управления, таймер и блок коррекции скорости, первый вход которого подключен к выходу измерителя скорости, третий вход блока коррекции скорости подключен к выходу таймера, а выход - к второму входу блока коррекции местоположения, третий вход и выход которого, являющийся выходом системы, соединены соответственно с первыми выходом и входом блока управления, причем выход обнаружения i-гo путевого ориентира второго сканера соединен с вторыми входами таймера и блока коррекции скорости и третьим входом блока управления, а выход обнаружения i-гo путевого ориентира первого сканера связан с первым входом таймера и вторым входом блока управления, второй и третий выходы которого соединены с первыми входами включения и выключения соответственно первого и второго сканеров, вторые входы которых подключены соответственно к четвертому и пятому выходам блока управления, который содержит три линии задержки, два триггера, четыре логических элемента ИЛИ, регистр, дешифратор, блок логических элементов И и блок регистров, выходы с первого по n-й которого соединены соответственно с одними из входов блока логических элементов И, выходы с первого по n-й которого соединены с соответствующими входами четвертого логического элемента ИЛИ, выход которого соединен с вторым входом регистра, выход которого является первым выходом блока управления, первым входом которого является вход дешифратора, выходы с первого по n-й которого соединены соответственно с другими входами блока логических элементов И и третьего логического элемента ИЛИ, выход которого соединен с входом записи регистра, единичным входом второго триггера и входами третьей линии задержки и первой линии задержки, выход которой соединен с единичным входом первого триггера и входом второй линии задержки, выход которой соединен с вторым входом первого логического элемента ИЛИ, первый вход и выход которой соединены соответственно с шиной "Начальная установка" и нулевым входом первого триггера, выход которого является третьим выходом блока управления, вторым выходом которого является выход второго триггера, нулевой вход которого соединен с выходом второго логического элемента ИЛИ, первый и второй входы которого соединены соответственно с шиной "Начальная установка" и выходом третьей линии задержки, выходы второй и третьей линий задержки являются соответственно пятым и четвертым выходами блока управления, вторым и третьим входами которого являются третьи входы соответственно второго и первого логических элементов ИЛИ (см. RU 2090420 С1, В 61 L 25/00, 20.09.97).
В известной системе для определения местоположения поезда повышение точности определения местоположения поезда обеспечивается путем коррекции показаний измерителя скорости по данным обнаружения ориентира двумя сканерами, разнесенными по направлению движения поезда на фиксированное расстояние.
К недостаткам известной системы для определения местоположения поезда следует отнести недостаточно высокую точность определения местоположения поезда, а также ее сложность и относительно невысокую надежность.
Технический результат заключается в создании устройства корректировки линейной координаты нахождения поезда, обладающего высокой точностью измерения линейной координаты и высокой надежностью.
Технический результат достигается тем, что в устройстве корректировки линейной координаты нахождения поезда, содержащем подключенный к вычислительному блоку датчик пути и скорости, установленный на оси колесной пары локомотива или головного вагона поезда и связанный с этой осью поводковой муфтой, две последовательно соединенные приемные катушки, установленные на тележке локомотива или головного вагона поезда, свободные выводы катушек подключены ко входу локомотивного приемника, выход которого через первый блок сопряжения подключен к вычислительному блоку, на буксовом узле локомотива или головного вагона поезда установлен датчик ускорений, который через второй блок сопряжения подключен к вычислительному блоку.
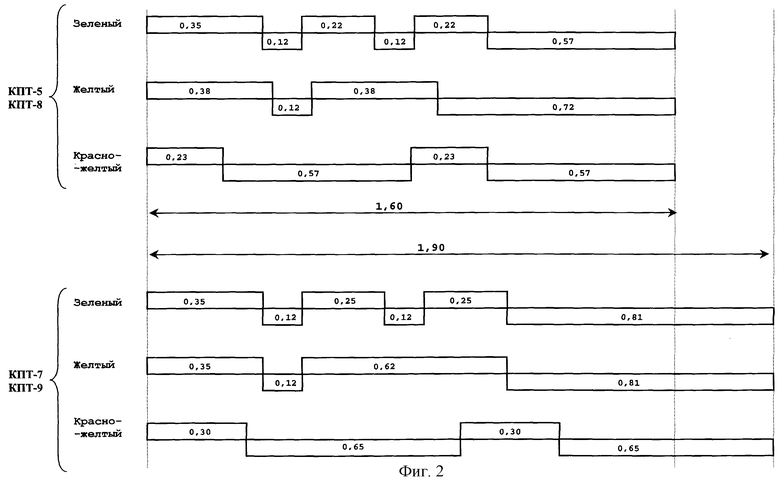
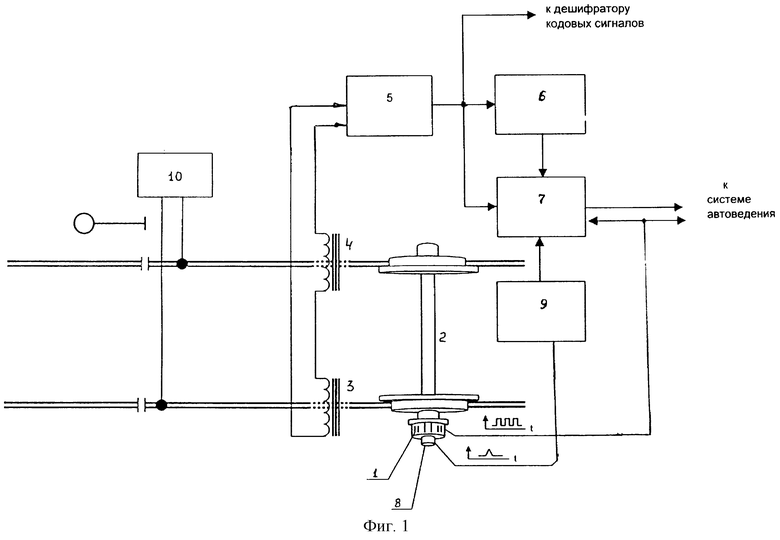
На фиг.1 представлена структурная схема устройства корректировки линейной координаты нахождения поезда. На фиг.2 представлены коды путевых трансмиттеров системы автоматической локомотивной непрерывной сигнализации.
Устройство корректировки линейной координаты нахождения поезда содержит датчик 1 пути и скорости, установленный на оси 2 колесной пары локомотива или головного вагона электропоезда и связанного с этой осью поводковой муфтой, две последовательно соединенные приемные катушки 3, 4, установленные на тележке локомотива или головного вагона поезда, свободные выводы катушек подключены к входу локомотивного приемника 5, выход которого через первый блок сопряжения 6 подключен к вычислительному блоку 7, на буксовом узле локомотива или головного вагона поезда установлен датчик 8 ускорений, который через второй блок 9 сопряжения подключен к вычислительному блоку 7.
Устройство работает следующим образом.
Во время движения поезда сигнал с датчика 1 пути и скорости, установленного на оси 2 колесной пары локомотива, поступает в вычислительное устройство 7, в котором по частоте повторения импульсов вычисляется скорость движения поезда, а по их количеству - величина пройденного пути с момента начала движения поезда. Вычислительное устройство 7 осуществляет также анализ кодового импульсного сигнала системы автоматической локомотивной непрерывной сигнализации (АЛСН), в котором содержится информация об огне светофора на данном блок-участке. Этот сигнал с помощью кодового путевого трансмиттера передается в рельсовую цепь. Передаваемый кодовый сигнал представляет собой строго определенную для каждого огня светофора комбинацию импульсов и разделяющих их пауз, причем период кодовой комбинации для любого огня светофора в пределах одного блок-участка постоянный и определяется типом установленного на данном блок-участке кодового путевого трансмиттера. При этом на примыкающих блок-участках применяются кодовые путевые трансмиттеры другого типа, формирующие кодово-импульсную комбинацию с другим периодом. Это необходимо для обеспечения хорошей сигнальной совместимости кодовых путевых трансмиттеров, работающих на смежных блок-участках, т.к. несмотря на то, что рельсовые цепи соседних блок-участков отделяются друг от друга изолирующим стыком, возможна аварийная ситуация, когда изоляция нарушается и имеет место прохождение сигнала соседнего кодового путевого трансмиттера в данную рельсовую цепь как сигнала помехи. Локомотив, вступая на данный блок-участок (противоположный передающему трансмиттеру конец рельсовой цепи), передней колесной парой замыкает рельсовую цепь данного блок участка. По ней начинает протекать сигнальный ток, создающий магнитное поле вокруг каждой рельсовой нити. Это магнитное поле воспринимается локомотивными приемными катушками 3, 4 (магнитной антенной), установленными на передней тележке локомотива перед первой колесной парой. Принятый кодовый импульсный сигнал поступает на вход локомотивного приемника 5, в котором он усиливается и детектируется. С выхода локомотивного приемника 5 кодовый импульсный сигнал поступает через первый блок 6 сопряжения в вычислительный блок 7, в котором осуществляются анализ и расшифровка принятого кодового импульсного сигнала от конкретного путевого трансмиттера 10 на данном блок-участке, и на основании этого анализа по вычисленному периоду принятой кодово-импульсной комбинации выносится решение о типе кодового путевого трансмиттера, работающего на данном блок-участке. При переходе на следующий блок-участок, на котором установлен другой кодовый путевой трансмиттер, изменяются параметры передаваемого кодового импульсного сигнала, прежде всего - его период. Вычислительный блок 7 отслеживает все изменения в принимаемом сигнале, сравнивая каждую поступившую кодово-импульсную комбинацию с принятой ранее, и в случае ее изменения записывает в свою оперативную память величину пройденного пути в момент этого изменения, а затем производит анализ и расшифровку принятой кодово-импульсной комбинации. Если период принимаемой кодово-импульсного комбинации изменился, выносится решение о том, что записанная в оперативной памяти вычислительного блока 7 величина пройденного пути соответствует линейной ординате границы двух смежных блок-участков, и эта информация передается на систему автоведения поезда, в противном случае эта записанная величина пройденного пути стирается до следующего изменения принимаемого кодово-импульсного сигнала. Принятый алгоритм расшифровки кодового импульсного сигнала позволяет получить очень малую вероятность пропуска преследуемого блок-участка.
Величина пройденного пути, вычисленная по сигналу датчика 1 пути и скорости, может иметь ошибку, вызванную, например, из-за неточного измерения диаметра бандажа колесной пары, на оси которой находится датчик пути и скорости, а также неизбежного проскальзывания колес по рельсам. Эта ошибка накапливается в процессе движения поезда и поэтому может достигать значительной величины. Информация о моменте проследовании границы двух смежных блок-участков позволяет осуществить поправку к непрерывно вычисляемой величине пройденного пути и тем самым существенно повысить точность определения местонахождения поезда. Сведения о линейных координатах границ блок-участков содержатся в базе данных системы автоведения поезда и на вычислительный блок 7 поступают от системы автоведения (непрерывно или по запросу). Если же такого взаимодействия не предусмотрено, то вычислительный блок 7 самостоятельно передает на систему автоведения результаты своего анализа (то есть самостоятельно вычисленную по показаниям датчика 1 пути и скорости координату границы преследованного блок-участка уже без вычисления необходимой поправки, оставляя это осуществить самой системе автоведения).
Дополнительную информацию о моменте проследования границы блок-участка дает датчик 8 ускорений, срабатывающий при прохождении колесной парой изолированного стыка, разделяющего смежные блок-участки. Датчик 8 ускорений размещен непосредственно на буксовом узле колесной пары, на которой установлен датчик 1 пути и скорости. Датчик 8 ускорений необходим для уточнения физической границы блок-участка, особенно в случаях, когда при смене кода сигнала одного трансмиттера на код сигнала другого трансмиттера возникают комбинации импульсов и пауз, затрудняющих быстрое принятие решения о переходе границы блок-участка, что приводит к относительно большой ошибке определения координаты границы блок-участка только на основании анализа принятого кодового сигнала, особенно при высокой скорости движения локомотива. Если во время приема измененной кодово-импульсной комбинации на вычислительный блок 7 от датчика 8 ускорений поступает сигнал, соответствующий моменту прохождения колесной парой изолированного стыка, то принимается решение о том, что именно в этот момент времени (с записью в оперативную память вычислительного блока 7 величины пройденного пути в момент поступления сигнала от датчика 8 ускорений) локомотив проследовал границу блок-участка. Таким образом, сигнал с датчика 8 ускорений поступает через блок 9 сопряжения в вычислительный блок 7, который определяет границы преследуемого блок-участка, осуществляет к ним привязку вычисленной величины пройденного пути и выдает информацию о необходимой величине коррекции пройденного пути на систему автоведения. За счет такой периодической коррекции ошибка измерения величины пройденного пути (накапливающаяся до 20-100 метров и более на 100 км пути) существенно сокращается - до ошибки измерения длины одного блок-участка, т.е. практически до 5-10 метров.
Устройство корректировки линейной координаты нахождения поезда представляет собой внешнее дополнительное устройство для системы автоведения поезда, которое передает системе автоведения информацию о необходимой поправке к величине пройденного пути, вычисляемой по данным сигнала от датчика пути и скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОРРЕКТИРОВКИ ЛИНЕЙНОЙ КООРДИНАТЫ НАХОЖДЕНИЯ ПОЕЗДА | 2005 |
|
RU2290335C1 |
| Устройство определения местоположения и маршрута следования поезда | 2024 |
|
RU2836929C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2015 |
|
RU2591551C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446071C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2422314C1 |
Изобретение относится к технике управления движением на железных дорогах и предназначено для использования в системах автоведения поездов. Устройство содержит подключенный к вычислительному блоку датчик пути и скорости, установленный на оси колесной пары локомотива или головного вагона электропоезда и связанный с этой осью поводковой муфтой. Имеются две последовательно соединенные приемные катушки, подключенные свободными выводами ко входу локомотивного приемника. Выход приемника через первый блок сопряжения подключен к вычислительному блоку. Последний выполнен с возможностью вычисления по частоте повторения импульсов скорости движения поезда, а по их количеству - величины пройденного пути с момента начала движения поезда и с возможностью определения линейной координаты границы преследуемого блок-участка пути на основании анализа поступающего с выхода приемника кодового импульсного сигнала системы автоматической локомотивной непрерывной сигнализации и выдачи сигнала о проследовании границы блок-участка и данных о внесении необходимой поправки на вычисленную величину пройденного пути. На буксовом узле локомотива или головного вагона установлен датчик ускорений, срабатывающий при проследовании колесной пары через стык. Датчик ускорений через второй блок сопряжения подключен к вычислительному блоку, осуществляющему по сигналу, поступившему от датчика ускорений, уточнение линейной координаты границы преследуемого блок-участка. Изобретение позволяет повысить точность измерения линейной координаты нахождения поезда. 2 ил.
Устройство коррекции линейной координаты нахождения поезда, содержащее подключенный к вычислительному блоку датчик пути и скорости, установленный на оси колесной пары локомотива или головного вагона поезда и связанный с этой осью поводковой муфтой, две последовательно соединенные приемные катушки, установленные на тележке локомотива или головного вагона поезда и подключенные свободными выводами ко входу локомотивного приемника, выход которого через первый блок сопряжения подключен к вычислительному блоку, выполненному с возможностью вычисления по частоте повторения импульсов скорости движения поезда, а по их количеству - величины пройденного пути с момента начала движения поезда и с возможностью определения линейной координаты границы преследуемого блок-участка пути на основании анализа поступающего с выхода локомотивного приемника кодового импульсного сигнала системы автоматической локомотивной непрерывной сигнализации и выдачи сигнала о проследовании границы блок-участка и данных о внесении необходимой поправки на вычисленную величину пройденного пути, отличающееся тем, что на буксовом узле локомотива или головного вагона поезда установлен датчик ускорений, срабатывающий при проследовании колесной пары через стык, причем датчик ускорений через второй блок сопряжения подключен к вычислительному блоку, осуществляющему по сигналу, поступившему от датчика ускорений, уточнение линейной координаты границы преследуемого блок-участка.
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 1994 |
|
RU2090420C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, ПЕРЕМЕЩАЮЩЕГОСЯ ВДОЛЬ СРЕДСТВА РАСПРОСТРАНЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 1996 |
|
RU2181680C2 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1997 |
|
RU2139215C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ЛОКОМОТИВА | 1993 |
|
RU2063349C1 |

