Изобретение относится к области систем управления и может быть использовано при проектировании систем управления угловым движением выносных элементов конструкции (ВЭК), например, оптических наблюдательных инструментов, связанных через средство их поворота с корпусом вращающегося относительно наблюдаемых ориентиров космического (КА) или иного аппарата, в частности, систем управления угловым движением солнечных батарей (СБ), связанных через электромеханический привод с корпусом вращающегося относительно Солнца КА.
Известен способ управления угловым движением преимущественно панелей солнечных батарей, включающий наведение панелей СБ на Солнце путем измерения отклонения нормали к панелям СБ от Солнца и их поворота относительно корпуса КА [1]
Недостатком способа является то, что поворот СБ после определения отклонения от направления на Солнце выполняется без учета величины и знака угловой скорости вращения КА относительно Солнца, что приводит к увеличению времени ориентации СБ на Солнце. Кроме того, при превышении угловой скорости вращения КА максимальной угловой скорости вращения СБ, реализуемой электромеханическим приводом, например, при аварийной закрутке КА в плоскости орбиты, происходит уменьшение интегрального времени освещенности излучением Солнца фотопреобразователей СБ (уменьшение времени нахождения наблюдаемого ориентира в поле обзора ВЭК), следовательно, и уменьшается энергоснабжение КА.
Наиболее близким к решаемой задаче является способ (прототип) управления угловым движением выносных элементов конструкции, в частности, панелей солнечных батарей, вращающегося относительно наблюдаемого ориентира Солнца, космического аппарата, включающий вращение выносных элементов относительно корпуса аппарата, например, панелей солнечных батарей в направлении, противоположном повороту корпуса космического аппарата при вращении относительно наблюдаемого ориентира. При этом КА поддерживает трехосную орбитальную ориентацию [2]
Недостатком известного способа является то, что при превышении угловой скорости вращения КА максимальной угловой скорости вращения СБ, реализуемой электромеханическим приводом, например, при аварийной закрутке КА в плоскости орбиты, происходит уменьшение интегрального времени освещенности излучением Солнца фотопреобразователей СБ (уменьшение времени нахождения наблюдаемого ориентира в поле обзора ВЭК), следовательно, и уменьшается энергоснабжение КА.
Техническим результатом изобретения является устранение указанных недостатков.
Технический результат достигается тем, что в способе управления угловым движением выносных элементов конструкции движущегося относительно наблюдаемого ориентира аппарата, включающем вращение выносных элементов относительно корпуса аппарата в направлении, противоположном повороту корпуса аппарата относительно наблюдаемого ориентира, в отличие от прототипа при выходе ориентира из поля обзора выносных элементов вращение выносных элементов производят в направлении: совпадающем с направлением поворота корпуса аппарата относительно ориентира.
При этом вращение выносных элементов в направлении, совпадающем с направлением поворота корпуса аппарата, осуществляют при одновременном выполнении условий отсутствия затенения ориентира, при угловой скорости поворота аппарата больше, чем реализуемая угловая скорость вращения выносных элементов относительно корпуса упомянутого аппарата и при отсутствии ориентира в поле обзора выносных элементов, например, при отклонении оси визирования выносных элементов от ориентира, в частности, нормали к плоскости панелей от Солнца, на величину угла, превышающую допустимое значение.
Кроме того, при управлении угловым движением выносных элементов конструкции, вращение выносных элементов в направлении, совпадающем с направлением поворота корпуса аппарата, осуществляют до достижения поверхностью, ограничивающей поле обзора выносных элементов, местного горизонта, образованного элементами конструкции аппарата.
Причинно-следственная связь между совокупностью вышеуказанных существенных признаков и достигаемым результатом в способе управления угловым движением выносных элементов конструкции, преимущественно панелей солнечных батарей, движущегося относительно наблюдаемого ориентира, например Солнца, космического или иного аппарата, заключается в том, что вращение выносных элементов относительно корпуса КА в направлении, совпадающем с направлением поворота корпуса космического аппарата при отсутствии ориентира в поле обзора ВЭК, увеличивает суммарную угловую скорость поворота оси визирования ВЭК, в частности, панелей СБ относительно Солнца, и сокращает время приведения ориентира в упомянутое поле обзора ВЭК, а вращение выносных элементов в направлении, обратном повороту КА при наличии ориентира в поле обзора ВЭК уменьшает суммарную скорость поворота оси визирования ВЭК относительно наблюдаемого ориентира и, следовательно, увеличивает время нахождения ориентира в поле обзора ВЭК. Таким образом, достигается увеличение времени нахождения ориентира (Солнца) в поле обзора ВЭК (СБ) вращающегося, например, при аварийной закрутке КА и увеличивается время наблюдения и поток информации от ориентира (энергоснабжение бортовых систем КА от СБ).
Для пояснения сущности изобретения приводится чертеж.
На чертеже обозначено: 1 ориентируемые выносные элементы конструкции (панели солнечных батарей), 2 Солнце, излучение от Солнца, 3 угловое отклонение Q оси визирования ВЭК от направления на ориентир, 4 ось визирования n (нормаль к плоскости панелей СБ), 5 корпус КА, 6 тень Земли, 7 Земля, 8 освещенный участок орбиты, 9 поле обзора ВЭК (конус освещенности фотопреобразователей СБ с углом А при вершине около 120 градусов, при попадании в который излучения Солнца обеспечивается выработка электроэнергии), Х строительная ось КА по каналу рыскания, Y строительная ось КА по каналу крена, Z строительная ось КА по каналу тангажа, Wка угловая скорость закрутки КА, Wоб угловая скорость вращения СБ относительно корпуса КА, Wo вектор орбитальной угловой скорости КА.
Описание предлагаемого способа управления приведем на примере функционирования системы ориентации солнечных батарей (СОСБ). Традиционной задачей СОСБ является наведение панелей СБ 1 на Солнце 2 путем измерения углового отклонения 3 нормали 4 к плоскости панелей СБ от Солнца и их поворота в сторону уменьшения измеренного углового рассогласования. Наведение выполняется путем разворотов и последующего поддержания требуемой ориентации в пространстве корпуса КА 5 средствами системы управления углового движения аппарата (СУД) и поворота СБ электромеханическими приводами (не показаны) относительно корпуса КА с угловой скоростью Wсб.
Для конкретизации полагаем, что КА 5 закручен с угловой скоростью Wка вокруг нормали к плоскости орбиты и находится вне тени 6 Земли 7 на освещенном участке 8 орбиты. При этом угловая скорость поворота КА Wка по величине больше, чем Wсб. Режим закрутки может быть средством обеспечения гарантированного энергоснабжения бортовых систем КА при нештатных ситуациях, связанных со временным нарушением, например, орбитальной ориентации КА. При закрутке КА излучение Солнца периодически попадает в рабочий конус 9 освещенности фотопреобразователей СВ, чем обеспечивается минимально необходимое энергоснабжение КА.
Согласно предлагаемому способу при попадании излучения Солнца 2 в поле обзора 9 панели СБ 1 вращают относительно корпуса КА в направлении, противоположном повороту КА относительно Солнца. Так как угловая скорость КА больше угловой скорости вращения СБ относительно корпуса КА, то нормаль 4 будет уходить от направления на Солнце с угловой скоростью
Максимальная длительность нахождения Солнца в поле обзора
dt1 A / Dw1.
После выхода Солнца из поля обзора предлагается вращать СБ в направлении, совпадающем с направлением вращения КА в пространстве. Относительная угловая скорость поворота СБ относительно направления на Солнце при этом составляет ,
,
а длительность отсутствия Солнца в поле обзора
dt2= (2•π-A)/Dw2, (3),
где π = 3,14159 ...
Скважность наличия Солнца в поле обзора составляет величину
C dt1 / (dt1 + dt2. (4)
Из (4) следует, что предлагаемый способ (Wсб не равно нулю) обеспечивает более высокую величину скважности, чем известные (Wсб 0).
Вышеописанные действия выполняются при отсутствии затенения поля обзора ВЭК, в частности, СБ на освещенном участке орбиты.
Если наблюдательный ВЭК расположен таким образом, что выступающие элементы конструкции КА при повороте ВЭК попадают в его поле обзора, то поворот ВЭК в направлении, совпадающем с направлением поворота корпуса аппарата, осуществляют до достижения геометрической поверхностью, ограничивающей поле обзора выносных элементов, местного горизонта, образованного элементами конструкции аппарата.
Легко убедиться, что и в этом случае так же обеспечивается более высокая величина скважности, т.е. длительности нахождения наблюдаемого ориентира в поле обзора ВЭК, чем при известных способах управления.
Реализация способа управления может осуществляться следующими средствами. ВЭК поворачиваются относительно корпуса КА электро-механическим приводом. Отклонение оси визирования ВЭК (СБ) от направления на ориентир (Солнце) измеряется солнечным датчиком (СД), угловое положение ВЭК относительно корпуса аппарата измеряется датчиком угла (ДУ) в составе привода. Наличие Солнца в конусе поля обзора СБ можно определить путем сравнения сигналов с задатчика величины угла поля обзора с сигналом отклонения нормали к СБ от направления на Солнце от СД и ДУ. Эту же задачу можно выполнить с помощью компаратора, сравнивая сигналы с датчика тока от фотопреобразователе СБ с заданным пороговым значением, устанавливаемым задатчиком порогового сигнала. Угловая скорость поворота КА измеряется блоком измерения угловой скорости (ИУС) КА. В состав системы управления включается блок сравнения (БлС) Wка и Wсб, выход которого связан со входом блока анализа и задания угловой скорости (БАЗС) поворота ВЭК. К другим входам (второму, третьему и т.п. в зависимости от реализации) БАЗС подключены выходы средства определения затенения поля обзора (ОЗПО) ВЭК. Величина Wсб может задаваться задатчиком угловой скорости (ЗУС) СБ. Ко входам ОЗПО подклкючены выходы СД, ДУ. В состав ОЗПО входят задатчики границ поля (ЗГПО) обзора ВЭК, координат местного горизонта, образованного элементами конструкции КА, логическая схема (ЛС), спецвычислитель (СВ). Используя измерительную информацию от ДУ, СД, а также информацию от ЗУС, ЗГПО в ОЗПО с помощью ЛС и СВ формируются сигналы о наличии или отсутствии и причины затенения (в частности, теневой участок орбиты, достижение границы местного горизонта и т.п.) поля обзора ВЭК. Эти сигналы затем вместе с выходным сигналом БлС используются в БАЗС для формирования управляющих сигналов для управления поворотом ВЭК. БАЗС формирует сигналы на включение с требуемым знаком или останов поворота в соответствии с вышеописанной последовательностью управления в виде логических сигналов (например, в виде сигналов высокого уровня логическая 1 и низкого уровня - логический 0) по крайней мере на двух выходах. Как вариант, возможно формирования кодового сигнала о требуемой величине угла и/или угловой скорости поворота ВЭК, при этом к его входам, при необходимости, может быть подключен ИУС. Выходы БАЗС подключены ко входам блока управления (БУ), в состав которого могут входить и усилители-преобразователи привода (УП), непосредственно выполняющего формирование командных сигналов на поворот ВЭК. В варианте управления с использованием величины угла и угловой скорости поворота ВЭК ко входам ВУ могут быть подключены выходы ДУ и, возможно, выходы измерителей угловой скорости выходного вала привода.
Таким образом, предлагаемый способ управления позволяет увеличить время нахождения наблюдаемого ориентира в поле обзора ВЭК, в частности, при аварийной закрутке КА в плоскости орбиты увеличить интегральное время освещенности излучением Солнца фотопреобразователей СБ.
Использование: в области систем управления угловым движением выносных элементов конструкции (ВЭК), в том числе поворотных оптических инструментов на корпусе вращающегося относительно наблюдаемых ориентиров космического аппарата (КА) и, в частности, солнечных батарей (СБ), связанных с КА через электромеханический привод. Сущность изобретения: вращают ВЭК относительно корпуса КА в направлении, противоположном направлению вращения этого корпуса относительно наблюдаемого ориентира, а при отсутствии ориентира в поле обзора ВЭК вращают их в направлении, совпадающем с направлением поворота корпуса КА, если одновременно выполнены условия: ориентир не затенен; угловая скорость поворота КА больше реализуемой угловой скорости вращения ВЭК относительно корпуса КА. В случае СБ выходом ориентира из поля обзора считается отклонение нормали к плоскости панелей СБ от Солнца на угол, превышающий допустимую величину. Изобретение позволяет увеличить время нахождения ориентира (Солнца) в поле обзора ВЭК (СБ) на борту КА, находящегося, например, в режиме аварийной закрутки, чем повышается информативность наблюдения (энергоснабжение КА от СБ). 2 з. п. ф-лы, 1 ил.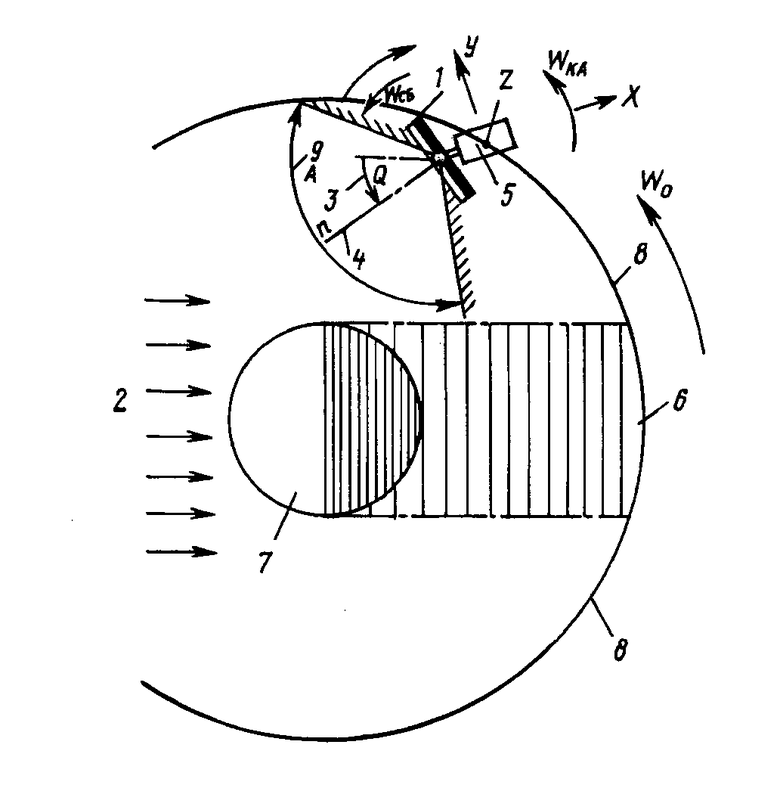
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Раушенбах Б.В., Токарь Е.Н | |||
| Управление ориентацией космических аппаратов | |||
| - М.: Наука, 1974, с | |||
| Фрикционная муфта с переменною скоростью вращения | 1920 |
|
SU444A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Мирошниченко Л.А | |||
| и др | |||
| Система ориентации и стабилизации спутника телевизионного вещания "Экран" | |||
| Известия АН СССР Техническая кибернетика, N 4 - М.: Наука, 1977. | |||
