Изобретение относится к управлению угловым движением космических аппаратов (КА) с помощью реактивных исполнительных органов силовых гироскопов (СГ) и реактивных двигателей ориентации (ДО).
Известен способ управления КА с помощью реактивных исполнительных органов СГ и ДО при выполнении режимов ориентации (см. Каструччио, Ирби. Цифровая система стабилизации орбитальной космической станции "Скайлэб". BPT N 10, 1973, стр. 74-75), суть которого заключается в том, что в течении времени (t) построения и поддержания требуемой ориентации КА с помощью СГ наряду с измерениями вектора-функции  кинетического момента в СГ измеряют значения вектора абсолютной угловой скорости корпуса КА
кинетического момента в СГ измеряют значения вектора абсолютной угловой скорости корпуса КА  По измеренным значениям
По измеренным значениям  определяют кинетический момент корпуса КА:
определяют кинетический момент корпуса КА:
где I тензор инерции КА.
Далее определяют суммарный вектор кинетического момента 

В момент начала режима насыщения (ts) системы СГ, определяемый по началу невыполнения условия:
где S область располагаемых значений вектора кинетического момента СГ,
осуществляют разгрузку системы СГ от  путем одновременного приложения к корпусу КА тормозящего момента от системы СГ и стабилизирующего момента от ДО. При этом для разгрузки выбирается тот ДО, включение которого будет уменьшать величину максимальной составляющей вектора
путем одновременного приложения к корпусу КА тормозящего момента от системы СГ и стабилизирующего момента от ДО. При этом для разгрузки выбирается тот ДО, включение которого будет уменьшать величину максимальной составляющей вектора  , а затем составляющих текущих его значений, причем длительность включений ДО является кратной длительности включения одного минимального импульса. А число включений ДО зависит от конечной цели разгрузки, определяемой заданным значением вектора
, а затем составляющих текущих его значений, причем длительность включений ДО является кратной длительности включения одного минимального импульса. А число включений ДО зависит от конечной цели разгрузки, определяемой заданным значением вектора  на момент ее окончания.
на момент ее окончания.
Основной недостаток рассмотренного способа заключен в том, что разгрузка системы СГ от накопленного кинетического момента производится без учета потребного кинетического момента на выполнение текущего режима ориентации и при этом ДО используется не с максимальной эффективностью. Все это приводит к перерасходу рабочего тела на управление КА.
Указанный недостаток отсутствует в другом известном способе управления, см. "Космическая астрофизическая обсерватория "Гамма". Определение выполнимости режимов ориентации по располагаемому кинетическому моменту. П25869-118. НПО "Энергия" им. С.П.Королева, г. Калининград, 1991 г. стр. 11-14.
Суть данного способа, по технической сути наиболее близкого к предлагаемому изобретению, заключается в том, что в процессе управления угловым движением КА измеряют текущие значения вектора кинетического момента в системе СГ, измеряют значения вектора абсолютной угловой скорости КА, определяют по вектору абсолютной угловой скорости значение вектора кинетического момента корпуса КА, в момент принятия решения о разгрузке системы СГ, определяемый по суммарному значению указанных векторов кинетического момента и параметрам области S располагаемых значений кинетического момента, определяют вектор кинетического момента для разгрузки системы СГ и кинематические параметры для разворота КА, обеспечивающие эту разгрузку с помощью разгрузочного момента с максимальным значением произведения удельного импульса ДО на плечо действия его тяги. Далее, развернув КА, по указанным параметрам производят разгрузку системы СГ от накопленного кинетического момента путем одновременного приложения к корпусу КА разгрузочного момента от ДО и равного противоположно направленного момента от СГ.
Указанный способ хорошо себя зарекомендовал при использовании реактивных исполнительных органов высокодинамичного КА, на котором размещалась космическая астрофизическая обсерватория "Гамма" (см. В.С.Ковтун и др. "Математическое обеспечение проведения экспериментов при управлении ориентацией космического астрофизического модуля "Гамма", Известия АН СССР, "Техническая кибернетика", N 3, 1990, стр. 144-157), угловые скорости которого при управлении угловым движением только с помощью системы СГ превышали 0,8o/с.
Возможности системы СГ значительно ограничены при управлении большими орбитальными станциями типа "Мир", "Альфа" из-за уменьшения их "поворотливости" (см. Б. В. Раушенбах. "Управление ориентацией орбитальных станций", в сб. "Управление в пространстве", т. 2. Труды VI Международного симпозиума ИФАК по автоматическому управлению в пространстве. М. Наука, 1976, стр. 5-12), в результате больших моментов инерции, при которых потребный кинетический момент растет быстрее, чем располагаемый в системе. Поэтому становится невозможным осуществлять два программных разворота с помощью СГ для того, чтобы в промежутке между ними выполнить указанную в способе-прототипе оптимальную их разгрузку с помощью ДО.
Для выполнения подобных по продолжительности разворотов на станции "Мир" приходится применять одновременно "СГ + ДО".
Таким образом, основной недостаток способа-прототипа заключается в том, что для оптимальной разгрузки СГ с помощью ДО необходимо выполнить специальный, дополнительный разворот КА, который не предусмотрен основной программой полета и при больших моментах инерции КА становится невыполним с помощью одних только СГ. А применять дополнительно ДО для этого разворота становится не рационально, исходя из самой постановки задачи: уменьшить расход рабочего тела на управление КА.
Техническим результатом, достигаемым данным изобретением, является уменьшение расхода рабочего тела в ДО КА, управляемого СГ и ДО, при выполнении заданного программного разворота КА.
Указанный технический результат достигается тем, что в способе управления, включающем измерения текущих значений вектора кинетического момента в системе силовых гироскопов СГ и вектора абсолютной угловой скорости космического аппарата КА, определение по вектору абсолютной угловой скорости вектора кинетического момента корпуса КА, определение по значениям указанных векторов кинетического момента, а также по параметрам области располагаемых значений кинетического момента в системе СГ, момента времени начала разгрузки системы СГ, определение вектора кинетического момента для разгрузки системы СГ, определение кинематических параметров программного разворота, обеспечивающих проведение разгрузки СГ при минимальных затратах рабочего тела в ДО с использованием разгрузочного момента с максимальным значением произведения удельного импульса ДО на плечо действия их тяги, разгрузку системы СГ от накопленного кинетического момента путем одновременного приложения к корпусу КА разгрузочного момента от ДО и равного, противоположно направленного момента от СГ, после набора угловой скорости КА определяют расход рабочего тела на гашение остаточной угловой скорости в конце разворота при условии поддержания с помощью ДО в инерциальном пространстве неизменных значений векторов кинетического момента в системе СГ и корпуса КА на интервале пространственного движения, определяют значение вектора кинетического момента в системе СГ в инерциальном пространстве, соответствующего максимальному использованию запасов кинетического момента в системе СГ при гашении остаточной угловой скорости в конце разворота, определяют минимальный расход рабочего тела ДО, необходимый для предварительной разгрузки СГ от начального значения вектора кинетического момента до определенного выше значения, и текущие значения кинематических параметров разворота на интервале пространственного движения КА, при которых указанный минимальный расход достигается, определяют полный расход рабочего тела на гашение остаточной угловой скорости в конце разворота КА с учетом расхода на указанную предварительную разгрузку СГ, проверяют выполнение условия, при котором расход рабочего тела на гашение остаточной угловой скорости в конце разворота при условии поддержания с помощью ДО в инерциальном пространстве неизменных значений векторов кинетического момента системы СГ и корпуса КА на интервале пространственного движения больше расхода рабочего тела на гашение остаточной угловой скорости в конце разворота КА с учетом расхода на предварительную разгрузку СГ, и при его выполнении в процессе свободного пространственного движения КА по измеренным значениям вектора абсолютной угловой скорости определяют текущие значения кинематических параметров программного разворота, сравнивают их с кинематическими параметрами, соответствующими разгрузке СГ с минимальным расходом рабочего тела, и при достижении их равенства осуществляют разгрузку СГ от накопленного кинетического момента от начального до определенного выше значения при одновременном поддержании заданного значения вектора угловой скорости КА, а в случае не выполнения указанного условия гашение остаточной угловой скорости в конце разворота осуществляют без предварительной разгрузки СГ.
Введение новых признаков в предполагаемый "Способ." позволяет достичь указанного технического результата.
Поскольку система СГ позволяет иметь определенный "внутренний запас" кинетического момента при сохранении заданного углового движения КА, то необходимо этот запас использовать для гашения остаточной угловой скорости в конце разворота КА, не расходуя при этом бортового топлива. Чем больше указанный "запас", тем меньше топлива потребуется на гашение остаточной угловой скорости в конце разворота, а наибольший "запас" будет определяться параметрами области S. В данном способе определяется потребное значение вектора кинетического момента в системе СГ на конец разворота, которое позволяет полностью (максимально) использовать возможности системы СГ на безрасходное (по топливу ДО) гашение остаточной угловой скорости в конце разворота. Это потребное значение необходимо получить к моменту начала гашения без нарушения заданных уже условий программного разворота по направлению и длительности, т. е. сохранить набранную угловую скорость КА, определяемую вектором  . Для этого предлагается совместить два динамических режима: поддержания угловой скорости при пространственном движении КА и проведение разгрузки СГ к установленному значению.
. Для этого предлагается совместить два динамических режима: поддержания угловой скорости при пространственном движении КА и проведение разгрузки СГ к установленному значению.
Совмещение двух режимов позволяет выбрать на интервале пространственного движения момент времени и угол конечного поворота ему соответствующий, при которых расход топлива на разгрузку СГ будет минимален. Это достигается за счет наибольшего использования двигателей с максимальными коэффициентами эффективности момента, которые определены, в частности, в способе-прототипе и равны произведениям удельного импульса ДО на плечо действия их тяги.
Следовательно, используется пространственное движение для того, чтобы "произвести запас" максимального значения вектора кинетического момента в системе СГ при минимальных затратах рабочего тела для безрасходного гашения угловой скорости КА в конце разворота. Для сравнения берется расход рабочего тела в ДО при гашении угловой скорости без предварительной разгрузки. Такое управление в общем случае тоже может иметь место, однако его необходимо рассматривать как единичный случай в множестве возможных решений.
Таким образом, управление КА производится по оптимальным параметрам, полученным из множества решений в результате предварительного моделирования процесса. А вся оптимизация направлена на минимизацию расхода рабочего тела в ДО на гашение остаточной угловой скорости КА в конце его разворота и, как результат, на проведение всего режима.
На. фиг. 1 дан процесс набора угловой скорости; на фиг. 2 процесс гашения угловой скорости; на фиг. 3, 4 кватернион программного разворота; на фиг. 5 схема проведения разворота КА; на фиг. 6 система, реализующая способ.
Рассмотрим подробно суть предлагаемого изобретения на одном из примеров выполнения программного разворота.
Пусть при выполнении программного разворота КА в процессе набора угловой скорости вектор  достиг в системе СГ предельного значения
достиг в системе СГ предельного значения  (см. фиг. 1), заданного областью S, в виде сферы, обозначенной пунктиром в абсолютном инерциальном экваториальном базисе Iγ(oxγ, oyγ, oxγ) Далее после дополнительного включения ДО с целью достижения заданного значения
(см. фиг. 1), заданного областью S, в виде сферы, обозначенной пунктиром в абсолютном инерциальном экваториальном базисе Iγ(oxγ, oyγ, oxγ) Далее после дополнительного включения ДО с целью достижения заданного значения  был получен вектор
был получен вектор  .
.
В результате на момент времени окончания набора угловой скорости сформировался вектор
В процессе свободного пространственного движения значения составляющих вектора  поддерживалось за счет работы ДО, тем самым сохранялось заданное для разворота значение вектора
поддерживалось за счет работы ДО, тем самым сохранялось заданное для разворота значение вектора  .
.
По окончании же разворота производилось гашение угловой скорости  (приведение вектора
(приведение вектора  к нулю). Для этого первоначально использовались возможности системы СГ, затем окончательное гашение производилось с помощью ДО. По закону сохранения кинетического момента для замкнутой системы величина, на которую будет уменьшен вектор
к нулю). Для этого первоначально использовались возможности системы СГ, затем окончательное гашение производилось с помощью ДО. По закону сохранения кинетического момента для замкнутой системы величина, на которую будет уменьшен вектор  за счет перераспределения кинетического момента между системой СГ и корпусом КА, будет определяться проекцией вектора
за счет перераспределения кинетического момента между системой СГ и корпусом КА, будет определяться проекцией вектора  (см. отрезок C'C1 на фиг. 2) на направление вектора
(см. отрезок C'C1 на фиг. 2) на направление вектора 
При этом вектор  определяется по выражению:
определяется по выражению:
где  вектор кинетического момента, начало которого находится в центре области S, а конец в точке пересечения поверхности области S с направлением, заданным вектором
вектор кинетического момента, начало которого находится в центре области S, а конец в точке пересечения поверхности области S с направлением, заданным вектором  (см. фиг. 2).
(см. фиг. 2).
После гашения  с помощью СГ ДО погасят оставшуюся угловую скорость до нуля, скомпенсировав тем самым кинетический момент
с помощью СГ ДО погасят оставшуюся угловую скорость до нуля, скомпенсировав тем самым кинетический момент  величина которого определяется по выражению:
величина которого определяется по выражению:
При этом будет израсходовано согласно выражениям, рассмотренным в способе-прототипе, топливо в количестве Qi:
Q1 = ΔK1x/K1 + ΔK1y/K2 + ΔK1z/K3 (7),
где ΔK1x, ΔK1y, ΔK1z проекции вектора  на оси ox, oy, oz связанного базиса КА на момент начала гашения остаточной угловой скорости корпуса;
на оси ox, oy, oz связанного базиса КА на момент начала гашения остаточной угловой скорости корпуса;
K1, K2, K3 коэффициенты эффективности моментов относительно каждой из осей управления, равные произведениям удельных импульсов ДО, участвующих в управлении, на плечи действия тяги соответствующих ДО.
Управление КА при выполнении рассмотренного режима программного разворота можно провести и по-другому. Например, после получения необходимой угловой скорости  и дальнейшего ее поддержания в процессе свободного пространственного движения "перевести" конец вектора
и дальнейшего ее поддержания в процессе свободного пространственного движения "перевести" конец вектора  из точки C0 в точку C2 на поверхность области S (см. фиг. 2). Указанный "перевод" осуществляется за счет разгрузки системы СГ с помощью ДО к наперед заданному значению вектора кинетического момента, которое определяется вектором
из точки C0 в точку C2 на поверхность области S (см. фиг. 2). Указанный "перевод" осуществляется за счет разгрузки системы СГ с помощью ДО к наперед заданному значению вектора кинетического момента, которое определяется вектором  . При этом будет израсходовано какое-то топливо
. При этом будет израсходовано какое-то топливо  . Зато при гашении остаточных угловых скоростей, после окончания разворота большую часть вектора
. Зато при гашении остаточных угловых скоростей, после окончания разворота большую часть вектора  можно "скомпенсировать" внутренним кинетическим моментом КА за счет системы СГ. Для этого используются полностью возможности области S, определяемые отрезком C1C2, равным диаметру сферы, ограничивающей указанную область. Тогда расход топлива Q2 на гашение угловой скорости будет определяться по выражению:
можно "скомпенсировать" внутренним кинетическим моментом КА за счет системы СГ. Для этого используются полностью возможности области S, определяемые отрезком C1C2, равным диаметру сферы, ограничивающей указанную область. Тогда расход топлива Q2 на гашение угловой скорости будет определяться по выражению:
где ΔK2x, ΔK2y, ΔK2z проекции вектора  по направлению совпадающего с вектором
по направлению совпадающего с вектором  , а по величине равного
, а по величине равного  C1C2, на оси ox, oy, oz связанного базиса КА на момент начала гашения угловой скорости корпуса.
C1C2, на оси ox, oy, oz связанного базиса КА на момент начала гашения угловой скорости корпуса.
Очевидно, что значения Q1 и Q2 не могут быть равны между собой. Указанная очевидность вытекает из того, что в процессе программного разворота каждая из осей связанного базиса будет совершать в инерциальном пространстве вращательное движение, в то время как векторы  будут неподвижны. Следовательно, указанные вектора в каждый момент времени будут перепроектироваться на связанные оси КА. В случае, когда разворот осуществляется вокруг вектора конечного поворота, величина
будут неподвижны. Следовательно, указанные вектора в каждый момент времени будут перепроектироваться на связанные оси КА. В случае, когда разворот осуществляется вокруг вектора конечного поворота, величина  будет функцией
будет функцией  текущих значений угла конечного поворота β. При этом
текущих значений угла конечного поворота β. При этом  будет иметь минимально возможное значение в случае, когда при разгрузке совместится вектор
будет иметь минимально возможное значение в случае, когда при разгрузке совместится вектор  с направлением, противоположным вектору разгрузочного момента с максимальным значением коэффициента K, выбранного из K1, K2, K3 (случай, рассмотренный в способе-прототипе). Однако при выполнении одного пространственного разворота указанный случай можно рассматривать только как частный.
с направлением, противоположным вектору разгрузочного момента с максимальным значением коэффициента K, выбранного из K1, K2, K3 (случай, рассмотренный в способе-прототипе). Однако при выполнении одного пространственного разворота указанный случай можно рассматривать только как частный.
Для анализа процесса управления угловым движением КА обнуление модуля вектора  удобно разбить на три условных этапа и в соответствии с ними разделить его на три отрезка
удобно разбить на три условных этапа и в соответствии с ними разделить его на три отрезка 
1) обнуление первой части  на величину
на величину  с максимально эффективным применением ДО по отношению к разгрузочному вектору;
с максимально эффективным применением ДО по отношению к разгрузочному вектору;
2) обнуление второй части  на величину
на величину  за счет последующего его безрасходного "поглощения" системой СГ;
за счет последующего его безрасходного "поглощения" системой СГ;
3) обнуление третьей (оставшейся) части  в конце разворота с помощью ДО при сложившихся проекциях вектора
в конце разворота с помощью ДО при сложившихся проекциях вектора  на оси связанного базиса.
на оси связанного базиса.
Сравним указанный процесс управления с управлением, рассмотренным в первом случае, при определении расхода Q1. При этом в первом случае управление содержит 2-й и 3-й этап, а во втором (при получении Q2) все три этапа.
При разгрузке СГ от  будет затрачено топлива меньше или ровно столько же, как и на гашение
будет затрачено топлива меньше или ровно столько же, как и на гашение  на третьем этапе управления в первом случае управления, так как наименьшее значение
на третьем этапе управления в первом случае управления, так как наименьшее значение  выбирается из значений, определенный для текущих величин угла β, в которые входит и bk конечное значение этого угла.
выбирается из значений, определенный для текущих величин угла β, в которые входит и bk конечное значение этого угла.
Следовательно, на первом этапе мы можем уменьшить расход рабочего тела по сравнению с первым случаем.
Отрезок  всегда меньше отрезка
всегда меньше отрезка  (см. фиг. 2), так как первый получается через проекцию
(см. фиг. 2), так как первый получается через проекцию  на направление вектора
на направление вектора  образованную радиусом окружности с центром в точке C2, проходящей через точку C0, а второй через проекцию
образованную радиусом окружности с центром в точке C2, проходящей через точку C0, а второй через проекцию  образованную перпендикуляром, проведенным C0C'.
образованную перпендикуляром, проведенным C0C'.
Поскольку первая проекция больше второй, то до точки C1, определяющей располагаемое значение области S, в первом случае ближе, чем во втором.
Следовательно, на втором этапе второго случая управления "поглощенное" значение  будет меньше, чем в первом случае гашения угловой скорости, что объективно приводит к увеличению расхода топлива.
будет меньше, чем в первом случае гашения угловой скорости, что объективно приводит к увеличению расхода топлива.
И, наконец, на третьем этапе управления первого случая из-за отсутствия отрезка  значительно увеличивается отрезок
значительно увеличивается отрезок  что может увеличить расход топлива по сравнению со вторым случаем управления или оставить неизменным этот расход в частном случае максимально эффективного применения ДО (
что может увеличить расход топлива по сравнению со вторым случаем управления или оставить неизменным этот расход в частном случае максимально эффективного применения ДО (  соответствует углу βк).
соответствует углу βк).
Таким образом, чисто качественный анализ затрат рабочего тела при гашении остаточной угловой скорости КА с помощью СГ + ДО показал, что при поиске минимального значения расхода топлива Qmin необходимо одновременно рассматривать значения Q1 и Q2. Причем Q2 включает в себя функцию  зависящую от текущих значений угла конечного поворота β, а Q1 зависит только от значения bк.
зависящую от текущих значений угла конечного поворота β, а Q1 зависит только от значения bк.
Рассмотрим подробно определение функциональной зависимости  .
.
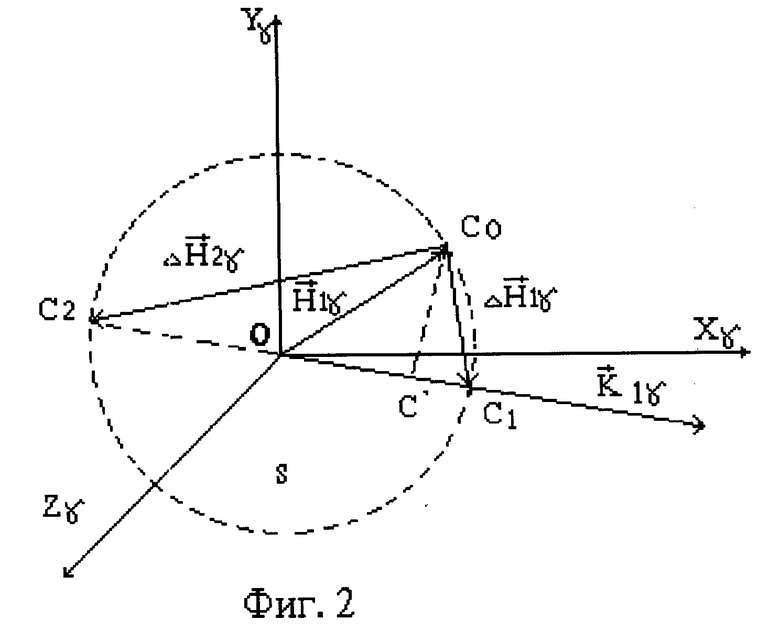
Как правило, для выполнения программного разворота задаются два кватерниона, например, A и A', определяющие положение связанного базиса B относительно одного из опорных на моменты начала и конца разворота. В качестве опорного может быть и базис Iγ
Тогда кватернион N (см. фиг. 3) программного разворота определяется по выражению
где  кватернион, сопряженный известному нормированному кватерниону A'. (см. В. Н. Бранец, И.П. Шмыглевский. Применение кватернионов в задачах ориентации твердого тела. М. Наука, 1973).
кватернион, сопряженный известному нормированному кватерниону A'. (см. В. Н. Бранец, И.П. Шмыглевский. Применение кватернионов в задачах ориентации твердого тела. М. Наука, 1973).
Вектор конечного поворота  (ei) определяется по расчетному значению нормированного кватерниона программного разворота N (N0, N1, N2, N3):
(ei) определяется по расчетному значению нормированного кватерниона программного разворота N (N0, N1, N2, N3):
где ei проекции вектора конечного поворота соответственно на оси ox, oy, oz связанного базиса.
Кроме указанного вектора, определяется угол конечного поворота
βk = 2 arccos No (11).
Далее выбирается из двух вариантов в сторону углов βк и 2π - βк направление кратчайшего поворота
После выбора направления поворота определяется требуемый управляющий момент  , учитывающий возможности системы СГ по конфигурации области S, портрет фазовой плоскости управления, ограничения, накладываемые на силовые гироскопы по величине создаваемого ими управляющего момента (подробно см. "Математическая модель режимов ориентации". П25252-118, РКК "Энергия" им. С. П. Королева, 1987 г.)
, учитывающий возможности системы СГ по конфигурации области S, портрет фазовой плоскости управления, ограничения, накладываемые на силовые гироскопы по величине создаваемого ими управляющего момента (подробно см. "Математическая модель режимов ориентации". П25252-118, РКК "Энергия" им. С. П. Королева, 1987 г.)
Для определения угловой скорости  интегрируется на интервале разворота КА (t0, t1) уравнение Эйлера:
интегрируется на интервале разворота КА (t0, t1) уравнение Эйлера:
где  главный вектор внешнего возмущающего момента, действующего на КА.
главный вектор внешнего возмущающего момента, действующего на КА.
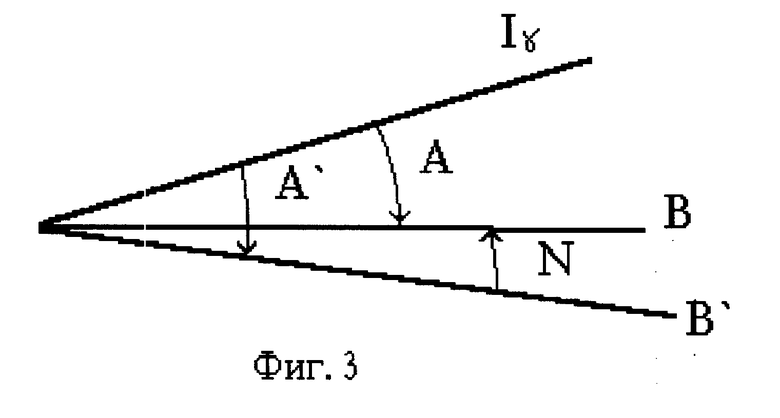
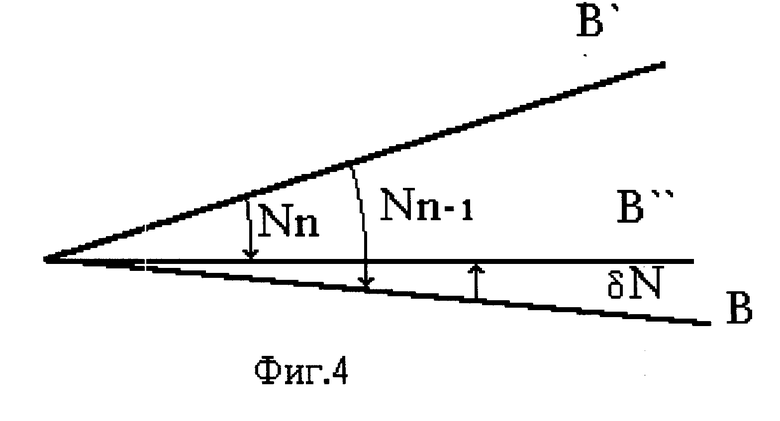
При этом выбирается шаг вычислений Δt, на котором рассчитываются текущие значения кватерниона N (см. фиг. 4):
Nn = Nn-1° δN, n = 1, 2, 3, ..., N0 = N, (13),
где компоненты δN1, δN2, δN3 кватерниона приращения δN определяются через компоненты вектора 

где ΔWx, ΔWy, ΔWz значения  на Δt
на Δt
По расчетным значениям Nn определяются текущие значения угла конечного разворота
Разворот считается законченным, если выполняется условие
βn ≅ ε (15),
где ε граница перехода на алгоритм поддержания ориентации.
По расчетным значениям кватерниона Nn можно определить значение другого кватерниона An, определяющего текущие положения связанного базиса относительно Iγ
An= A′° Nn (16),
В свою очередь через кватернион An можно перепроектировать вектор  в связанный базис:
в связанный базис:
Далее  рассчитывается по выражению:
рассчитывается по выражению:
На момент времени t0 (начала разворота) при определении  в выражении (17) используется кватернион A, а на момент окончания tk - кватернион А'.
в выражении (17) используется кватернион A, а на момент окончания tk - кватернион А'.
На фиг. 5 представлен пример схемы проведения разворота КА вокруг вектора конечного поворота  , расположенного на оси OO', где O центр связанного базиса, представленного осями ox, oy, oz. Угол конечного поворота βk в процессе разворота будет уменьшаться до достижения значения меньшего ε -границы, поэтому он отсчитывается от положения вектора
, расположенного на оси OO', где O центр связанного базиса, представленного осями ox, oy, oz. Угол конечного поворота βk в процессе разворота будет уменьшаться до достижения значения меньшего ε -границы, поэтому он отсчитывается от положения вектора  на момент времени tk, до положения этого же вектора на момент времени t0. Сам вектор
на момент времени tk, до положения этого же вектора на момент времени t0. Сам вектор  не меняя своих величины и направления в Iγ, опишет условно часть конической поверхности в связанном базисе. При этом он будет "перепроектироваться" на оси этого базиса в каждый момент времени t или при каждом значении b(t) В какой-то момент времени t', соответствующий углу β′ значение
не меняя своих величины и направления в Iγ, опишет условно часть конической поверхности в связанном базисе. При этом он будет "перепроектироваться" на оси этого базиса в каждый момент времени t или при каждом значении b(t) В какой-то момент времени t', соответствующий углу β′ значение  достигнет минимального значения
достигнет минимального значения  Например, на фиг. 5 этот момент соответствует углу Θmin, при котором вектор
Например, на фиг. 5 этот момент соответствует углу Θmin, при котором вектор  находится в плоскости XОY связанного базиса и при разгрузке СГ наибольшая из проекций DH2γ будет обнулена с помощью ДО с максимальным коэффициентом эффективности момента, единичный вектор которого обозначен как
находится в плоскости XОY связанного базиса и при разгрузке СГ наибольшая из проекций DH2γ будет обнулена с помощью ДО с максимальным коэффициентом эффективности момента, единичный вектор которого обозначен как 
Итак, при построении функциональной зависимости  по выражениям (17, 18) используются: в начальный момент времени t0 кватернион A, в конечный момент времени tk кватернион A', а в текущие моменты t кватернионы An, при этом β: = βn
по выражениям (17, 18) используются: в начальный момент времени t0 кватернион A, в конечный момент времени tk кватернион A', а в текущие моменты t кватернионы An, при этом β: = βn
После получения  определяется вторая расходная часть для Q2 в выражении (8). При этом модуль вектора
определяется вторая расходная часть для Q2 в выражении (8). При этом модуль вектора  определить легко, через модуль вектора
определить легко, через модуль вектора  и отрезок C1С2, который известен из параметров, определяющих область S. Для рассмотренного случая C1C2 2 R, где R радиус сферы описывающей S. Тогда сам вектор
и отрезок C1С2, который известен из параметров, определяющих область S. Для рассмотренного случая C1C2 2 R, где R радиус сферы описывающей S. Тогда сам вектор  можно определить по выражению:
можно определить по выражению:
Далее вектор  переводится в связанный базис:
переводится в связанный базис:
А компоненты вектора  являются уже исходными для расчета значения Q2.
являются уже исходными для расчета значения Q2.
Для получения значения  (см. (6)) необходимо определить отрезок C'C1 по выражениям:
(см. (6)) необходимо определить отрезок C'C1 по выражениям:
Перевод вектора  в связанный базис осуществляется по выражению:
в связанный базис осуществляется по выражению:
Далее производится определение значения Q1 (см. (7)) и из Q1 и Q2 выбирается значение Qmin.
Как видно из приведенного описания, управление программным разворотом КА при помощи "СГ + ДО" строится на основе математического моделирования процесса. Для этого строится модель процесса, определяются оптимальные параметры управления, исходя из сложившихся начальных условий, и по оптимальным параметрам производится непосредственно само управление КА.
Подытожим весь процесс управления.
После набора заданного значения угловой скорости  корпусом КА, измеряем значение вектора кинетического момента в системе СГ, а по измеренным значениям
корпусом КА, измеряем значение вектора кинетического момента в системе СГ, а по измеренным значениям  определяем значение вектора кинетического момента корпуса КА (см. (1)). Определяем расход рабочего тела Q1 на гашение остаточной угловой скорости разворота при условии поддержания с помощью ДО в инерциальном пространстве неизменных значений векторов кинетического момента в системе СГ и корпусе КА на интервале пространственного движения. Устанавливаем по определенному значению кинетического момента корпуса КА значение вектора кинетического момента в системе СГ, заданного в инерциальном пространстве, для полного использования запасов кинетического момента в системе СГ при гашении остаточной угловой скорости в конце разворота. Как видно из фиг. 2, это вектор
определяем значение вектора кинетического момента корпуса КА (см. (1)). Определяем расход рабочего тела Q1 на гашение остаточной угловой скорости разворота при условии поддержания с помощью ДО в инерциальном пространстве неизменных значений векторов кинетического момента в системе СГ и корпусе КА на интервале пространственного движения. Устанавливаем по определенному значению кинетического момента корпуса КА значение вектора кинетического момента в системе СГ, заданного в инерциальном пространстве, для полного использования запасов кинетического момента в системе СГ при гашении остаточной угловой скорости в конце разворота. Как видно из фиг. 2, это вектор  модуль которого равен R, а направление противоположно вектору
модуль которого равен R, а направление противоположно вектору 
Далее определяем  минимальный расход рабочего тела ДО, необходимый для разгрузки СГ от начального значения вектора кинетического момента до установленного значения. На фиг. 2 это вектор
минимальный расход рабочего тела ДО, необходимый для разгрузки СГ от начального значения вектора кинетического момента до установленного значения. На фиг. 2 это вектор 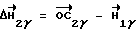 . При этом одновременно определяем текущее значение угла конечного поворота b′, при котором это минимальное значение достигается. Определяем полный расход рабочего тела Q2 на гашение остаточной угловой скорости с учетом расхода на указанную предварительную разгрузку. Далее проверяем выполнение условия
. При этом одновременно определяем текущее значение угла конечного поворота b′, при котором это минимальное значение достигается. Определяем полный расход рабочего тела Q2 на гашение остаточной угловой скорости с учетом расхода на указанную предварительную разгрузку. Далее проверяем выполнение условия
Q1 > Q2
и если оно выполняется, то в процессе свободного пространственного движения по измеренным значениям  определяем текущие значения угла конечного поворота. Для этого на борту КА используются те же расчетные зависимости, что и для прогноза (13, 14), только в данном случае при определении компонент кватерниона приращения δN используются измеренные значения вектора
определяем текущие значения угла конечного поворота. Для этого на борту КА используются те же расчетные зависимости, что и для прогноза (13, 14), только в данном случае при определении компонент кватерниона приращения δN используются измеренные значения вектора  .
.
Сравниваем текущие значения β со значением b′ и при достижении их равенства осуществляем разгрузку СГ от вектора  при одновременном поддержании заданного значения угловой скорости КА. А если условие не выполняется, то гашение остаточной угловой скорости в конце разворота осуществляем без предварительной разгрузки СГ.
при одновременном поддержании заданного значения угловой скорости КА. А если условие не выполняется, то гашение остаточной угловой скорости в конце разворота осуществляем без предварительной разгрузки СГ.
Для реализации предлагаемого способа управления выберем систему управления движением (СУД), построенную на принципах бесплатформенных инерциально-навигационных систем (БИНС). СУД такого типа установлена на орбитальном комплексе "Мир" (см. 30Ю ТО ч. 2, РКК "Энергия" им. С.П.Королева). Известны также описания такой системы в технической литературе. (См. например, Б. В. Раушенбах, Е. Н. Токарь. Управление ориентацией КА. М. Наука, 1974, стр. 102).
Рассмотрим из указанной СУД только те блоки и функциональные связи, которые необходимы для реализации данного способа (см.фиг. 6).
На фиг. 6 введены следующие обозначения:
1 блок управления (БУ) бортовой цифровой вычислительной машиной (БЦВМ);
2 БЦВМ;
3 блок датчиков угловых скоростей (БДУС);
4 блок согласующих устройств (БСУ);
5 блок силовых гироскопов (БСГ), содержащий устройство измерениями 
6 блок реактивных двигателей ориентации (БДО).
При этом БУ 1 соединен своим выходом с первым входом БЦВМ 2, а со вторым-четвертым входами БЦВМ 2 соединен поканально БДУС 3.
Выход БЦВМ2 через БСУ4 соединен с БСГ5 и БДО6. А выход БСГ5 соединен с пятым входом БЦВМ2.
Примером реализации БУ1 может служить пульт космонавтов станции "Мир", см. ТО ч. 10, РКК "Энергия" им. С.П.Королева.
Пример реализации остальных блоков системы представлен в книге: Б.В.Раушенбах, Е.Н.Токарь. Управление ориентацией КА, стр. 102-107.
До начала разворота при помощи БУ1 в БЦВМ закладываются компоненты кватернионов A и A' (см.фиг. 3). Оттуда же задается момент времени начала разворота КА.
При достижении бортовым временем заданного момента времени БЦВМ2 рассчитывает кинематические параметры разворота, по которым определяет требуемый управляющий момент и формирует его в виде управляющих сигналов через БСУ4 в БСГ5. Информация об изменениях  поступает с БСГ5 в БЦВМ2. Для этого используются, например, вращательные трансформаторы синус-косинусных преобразователей, установленных по осям прецессии двухстепенных СГ (гиродинов), см. например, прибор Г 15-16 М, 6АГ.400.013 ТО, РКК "Энергия" им.С.П.Королева. С БДУС3 поступает также информация о текущих значениях вектора
поступает с БСГ5 в БЦВМ2. Для этого используются, например, вращательные трансформаторы синус-косинусных преобразователей, установленных по осям прецессии двухстепенных СГ (гиродинов), см. например, прибор Г 15-16 М, 6АГ.400.013 ТО, РКК "Энергия" им.С.П.Королева. С БДУС3 поступает также информация о текущих значениях вектора  По значениям
По значениям  сравнивая их с параметрами области S, БЦВМ2 определяет момент насыщения системы СГ. При насыщении системы производится сравнение текущего значения
сравнивая их с параметрами области S, БЦВМ2 определяет момент насыщения системы СГ. При насыщении системы производится сравнение текущего значения  с заданным значением. Если заданное значение угловой скорости не достигнуто, БЦВМ продолжает формировать требуемый управляющий момент и через БСУ4 пересылать его для реализации в БДО6.
с заданным значением. Если заданное значение угловой скорости не достигнуто, БЦВМ продолжает формировать требуемый управляющий момент и через БСУ4 пересылать его для реализации в БДО6.
По достижении заданного значения угловой скорости КА БЦВМ2 определяет расход рабочего тела Qi, который будет получен при гашении набранной угловой скорости в конце разворота. Для этого используются представленные ранее зависимости, при этом исходной является заложенная через БУ1 информация о значениях кватерниона A'.
Далее в БЦВМ2 определяется также и значение Q2, которое сравнивается с Q1. В случае, когда Q1 больше Q2, фиксируется в БЦВМ значение угла конечного поворота β′, соответствующее 
В процессе свободного пространственного движения КА требуемый управляющий момент, определенный в кинематическом контуре СУД, формируется для поддержания заданной угловой скорости, в частности, для парирования действия  Одновременно идет сравнение текущих реальных значений углов конечного поворота β со значением b′ При этом, как уже отмечалось, используется информация, получаемая с БДУС3.
Одновременно идет сравнение текущих реальных значений углов конечного поворота β со значением b′ При этом, как уже отмечалось, используется информация, получаемая с БДУС3.
При достижении равенства указанных углов с БЦВМ2 в БСГ5 идет команда на начало разгрузки системы СГ к ранее определенному значению вектора  По данной команде силовые гироскопы будут "тормозиться" о корпус КА. В частности, оси прецессии гиродинов будут переводить оси роторов в новое положение, создавая при этом управляющий, "тормозящий" момент на корпусе КА. Указанный момент будет восприниматься динамическим контуром КА условно как "суммарный внешний возмущающий" и будет парироваться при помощи БДО6.
По данной команде силовые гироскопы будут "тормозиться" о корпус КА. В частности, оси прецессии гиродинов будут переводить оси роторов в новое положение, создавая при этом управляющий, "тормозящий" момент на корпусе КА. Указанный момент будет восприниматься динамическим контуром КА условно как "суммарный внешний возмущающий" и будет парироваться при помощи БДО6.
Таким образом будет осуществляться разгрузка системы СГ. При достижении текущим значением  заданного значения конца разгрузки действие на корпус КА управляющего момента прекратится, и, следовательно, как бы уменьшится "внешний возмущающий момент". Момент времени окончания разгрузки в системе СГ фиксирует БЦВМ2, которая и управляет осями прецессии гиродинов, приводя текущие значения кинетического момента к заданному.
заданного значения конца разгрузки действие на корпус КА управляющего момента прекратится, и, следовательно, как бы уменьшится "внешний возмущающий момент". Момент времени окончания разгрузки в системе СГ фиксирует БЦВМ2, которая и управляет осями прецессии гиродинов, приводя текущие значения кинетического момента к заданному.
При достижении текущим значением угла βε окрестности (см. (15)) разворот закончен и осуществляется гашение остаточной угловой скорости корпуса КА. Для этого требуемый управляющий момент реализуется сначала через БСГ4, а затем БДО5.
Как указывалось, изобретение направлено на уменьшение расхода рабочего тела в ДО при гашении остаточной угловой скорости в конце программного разворота.
Для малых КА типа "Гамма" рассмотренный способ управления не мог принести ощутимого эффекта. Это объясняется тем, что управление при выполнении разворотов КА строилось в подавляющем числе случаев только с использованием СГ. А редкие случаи использования СГ и ДО не могли также заметно повлиять при использовании предлагаемого способа на экономию топлива. Более существенным в этом плане был способ управления, предложенный авторами в прототипе.
Однако с переходом к управлению в космосе крупногабаритными конструкциями типа "Мир", "Альфа" стал одним из наиболее актуальных вопрос о расходе рабочего тела в реактивных двигателях. Хотя запасы топлива и пополняются с помощью транспортных грузовых кораблей "Прогресс-М", все равно его запасы невозможно было полностью восполнить при той частоте, с которой "Прогрессы" запускались, и намеченной в целом динамической частью программы полета.
Один из вариантов экономии топлива на борту станции "Мир" заключается в установке выносной двигательной установки (ВДУ), которая "выносит" в настоящее время ДО от основной конструкции станции на 10 м, а в перспективе, при установке на "Альфе", на 100 м. При этом расход топлива в ДО обратно пропорционален длине плеч действия их тяги (при равных удельных импульсах). Подробно это рассмотрено, в частности, при описании способа-прототипа.
Следовательно, предложенный авторами способ управления КА именно и дает дополнительную возможность использовать ВДУ совместно с СГ для экономии топлива в целом. Так, станция "Мир" в течение одних суток штатного полета совершает примерно два "переворота" в пространстве. Они могут совершаться как относительно продольных, так и поперечных осей. Кроме того, производится целый ряд "доворотов" корпуса с целью обеспечения проведения научных экспериментов. Всякий раз осуществляя заданный программный разворот и используя ВДУ для предварительной разгрузки СГ перед гашением остаточной скорости, в среднем можно сэкономить до 20% топлива, затрачиваемого на выполнение всего режима.
Указанная цифра зависит и от дополнительных расчетных параметров (кроме коэффициентов эффективности моментов ДО), в частности, от величины области S, величин заданных угловых скоростей, разворота и т.д. Поэтому она всякий раз должна рассматриваться применительно к конкретной конструкции КА, его СУД и к выполняемой программе полета.
Использование: системы ориентации космических аппаратов (КА), управляемых реактивными исполнительными органами и силовыми гироскопами (СГ). Сущность: способ управления КА с помощью реактивных исполнительных органов при выполнении разворота позволяет сократить расход рабочего тела на гашение остаточной угловой скорости в конце разворота КА за счет использования "запаса" кинетического момента системы силовых гироскопов, определяемых параметрами области S. Определяется потребное значение вектора кинетического момента в системе СГ на конец разворота, которое позволяет использовать возможности системы СГ на безрасходное (по топливу) гашение остаточной скорости. Для этого совмещаются два динамических режима: поддержание угловой скорости при пространственном движении КА и проведение разгрузки СГ к установленному значению. 6 ил.
Способ управления космическим аппаратом (КА) с помощью реактивных исполнительных органов при выполнении программного разворота, включающий измерение текущих значений вектора кинетического момента в системе силовых гироскопов и вектора абсолютной угловой скорости КА, определение по вектору абсолютной угловой скорости вектора кинетического момента корпуса КА, определение по значениям указанных векторов кинетического момента, а также по параметрам области располагаемых значений кинетического момента в системе силовых гироскопов, момента времени начала разгрузки системы силовых гироскопов, определение вектора кинетического момента для разгрузки системы силовых гироскопов, определение кинематических параметров программного разворота, обеспечивающих проведение разгрузки силовых гироскопов при минимальных затратах рабочего тела в двигателях ориентации с использованием разгрузочного момента с максимальным значением произведения удельного импульса двигателей ориентации на плечо действия их тяги, разгрузку системы силовых гироскопов от накопленного кинетического момента путем одновременного приложения к корпусу КА разгрузочного момента от двигателей ориентации и равного, противоположно направленного момента от силовых гироскопов, отличающийся тем, что после набора угловой скорости КА определяют расход рабочего тела на гашение остаточной угловой скорости в конце разворота при условии поддержания с помощью двигателей ориентации в инерциальном пространстве неизменных значений векторов кинетического момента системы силовых гироскопов и корпуса КА на интервале пространственного движения, определяют значение вектора кинетического момента в системе силовых гироскопов в инерциальном пространстве, соответствующего максимальному использованию запасов кинетического момента в системе силовых гироскопов при гашении остаточной угловой скорости в конце разворота, определяют минимальный расход рабочего тела двигателей ориентации, необходимый для предварительной разгрузки силовых гироскопов от начального значения вектора кинетического момента до определенного выше значения, и текущие значения кинематических параметров разворота на интервале пространственного движения КА, при которых указанный минимальный расход достигается, определяют полный расход рабочего тела на гашение остаточной угловой скорости в конце разворота КА с учетом расхода на указанную предварительную разгрузку силовых гироскопов, проверяют выполнение условия, при котором расход рабочего тела на гашение остаточной угловой скорости в конце разворота при условии поддержания с помощью двигателей ориентации в иннерциальном пространстве неизменных значений векторов кинетического момента системы силовых гироскопов и корпуса КА на интервале пространственного движения больше расхода рабочего тела на гашение остаточной угловой скорости в конце разворота КА с учетом расхода на предварительную разгрузку силовых гироскопов и при его выполнении, в процессе свободного пространственного движения КА по измеренным значениям вектора абсолютной угловой скорости определяют текущие значения кинематических параметров программного разворота, сравнивают их с кинематическими параметрами, соответствующими разгрузке силовых гироскопов с минимальным расходом рабочего тела, и при достижении их равенства осуществляют разгрузку силовых гироскопов от накопленного кинетического момента от начального до определенного выше значения при одновременном поддержании заданного значения вектора угловой скорости КА, а в случае невыполнения указанного условия гашение остаточной угловой скорости в конце разворота осуществляют без предварительной разгрузки силовых гироскопов.
| Космическая астрофизическая обсерватория "Гамма" | |||
| Определение выполнимости режимов ориентации по располагаемому кинетическому моменту | |||
| Устройство для мытья и сушки консервных коробок | 1927 |
|
SU25869A1 |
| НПО "Энергия" им.С.П.Королева, Калининград, 1991, с.11-14. | |||

