Изобретение относится к способам управления механизированными очистными комплексами и агрегатами в плоскости, преимущественно, крутого пласта при их работе по простиранию.
Известен способ управления [1, 2] крепью (агрегатом) в плоскости пласта, включающий поочередную передвижку базовой балки с хвостовиками и секций крепи со взаимным боковым смещением базовой балки с хвостовиком относительно секций крепи и устройство для его осуществления, содержащее базовую балку, состоящую из звеньев с хвостовиками, концы которых связаны с гидродомкратами смещения (управления) и расположенные между хвостовиками секции, что обеспечивает возможность или поступательного передвижения крепи (агрегата) в направлении простирания пласта вслед за его выемкой, или передвижения крепи с подъемом по восстанию. При этом боковые смещения крепи вдоль забоя обеспечиваются при поступательном движении крепи (агрегата) с помощью, установленных в хвостовиках, двухсторонних гидродомкратов смещения с малым ходом (гидропатронов).
В известном способе управления крепью (агрегатом) в плоскости крутого пласта при передвижке крепи (агрегата) вслед за очистным забоем происходит сползание базовой балки и секций крепи либо при каждом шаге перемещения, либо через несколько шагов передвижки крепи. Поэтому необходимо постоянно смещать базовую балку с хвостовиками по восстанию пласта (вверх) в исходное положение с последующей передвижкой к ним вплотную секций крепи. Выполнение вышеуказанных операций требует больших трудозатрат из-за необходимости многократного повторения этих операций.
В отличие от известного решения в предлагаемом способе исключается сползание крепи (агрегата) за счет подъема крепи по восстанию пласта при ее передвижении вслед за очистным забоем в определенном направлении.
Известен способ управления крепью в плоскости пласта, включающий поочередную передвижку базовой балки с хвостовиками и секций крепи и разворот хвостовиков и секций относительно базовой балки в противоположную сторону от направления смещения базовой балки при ее передвижке [3]
Известно также устройство для управления крепью в плоскости пласта, включающее базовую балку, состоящую из звеньев с хвостовиками в виде рычагов, которые шарнирно закреплены на базовой балке и имеют механизм фиксации и гидродомкраты смещения, которые связаны одними концами с хвостовиками [3]
Недостатком известных технических решений является невозможность регулировки угла разворота на любую величину и в любое время, как перед началом, так и в процессе передвижки.
Задачей изобретения является повышение маневренности управления крепью и снижение трудоемкости. Улучшение маневренности обеспечивается за счет возможности экстренной корректировки направления передвижения секций крепи в процессе смещения базовой балки путем одновременного разворота хвостовиков относительно базовой балки на величину свободного зазора между хвостовиками и секциями крепи. Снижение трудоемкости обеспечивается за счет того, что разворот хвостовиков производится посредством гидродомкрата двухстороннего действия в связи с тем, что отпадает необходимость в корректировке положения секций крепи из-за более точного (на заранее установленную величину) приподъема крепи, т.к. отсутствует накопление угловых погрешностей секций в процессе их передвижки. Повышение маневренности управления крепью и снижение трудоемкости приводит к повышению точности управления крепью.
Решение поставленной задачи обеспечивается тем, что способ и управления крепью в плоскости пласта, включающий поочередную передвижку базовой балки с хвостовиками секций и секций крепи и разворот хвостовиков и секций относительно базовой балки в противоположную сторону от направления смещения базовой балки при ее передвижке, предусматривает разворот хвостовиков и секций крепи осуществляют перед передвижкой базовой балки, а в процессе передвижки базовой балки при возникновении ее смещения производят одновременный разворот всех хвостовиков относительно базовой балки на величину свободного зазора между хвостовиками и секциями крепи. Устройство для осуществления данного способа, включает базовую балку, состоящую из звеньев в виде двуплечих рычагов, которые шарнирно закреплены на базовой балке и имеют гидродомкраты смещения, связанные одними концами с хвостовиками, а другими секциями крепи, и механизм фиксации, установленный на плече рычага со стороны базовой балки и выполнен в виде двухстороннего гидродомкрата. Корпус двухстороннего гидродомкрата может иметь опоры, а конец хвостовика выполняться в виде вилки, а для размещения упоров.
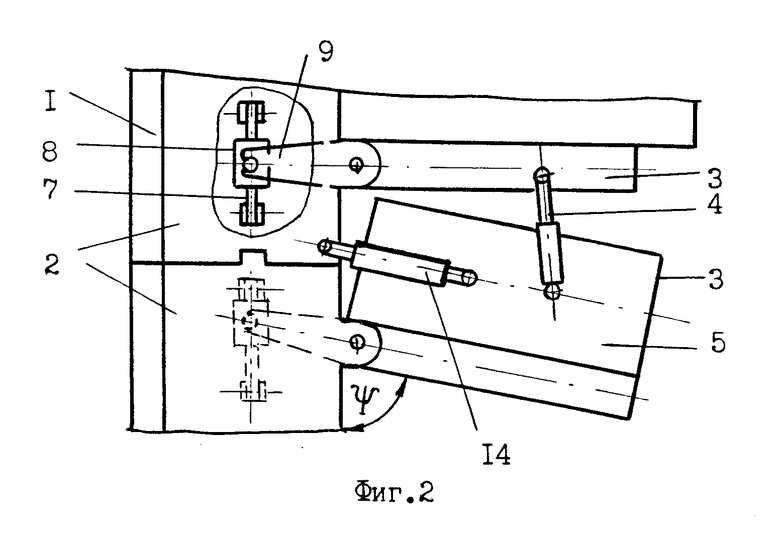
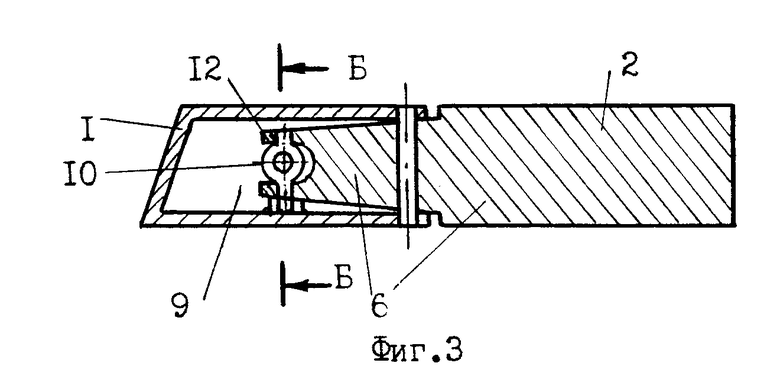
Изобретение поясняется чертежами, где на фиг. 1 показана механизированная крепь в плоскости пласта с передвинутой базовой балкой по простиранию на шаг передвижки крепи; на фиг. 2 разворот хвостовика и секции крепи относительно базовой балки в плоскости пласта для ее движения с подъемом; на фиг. 3
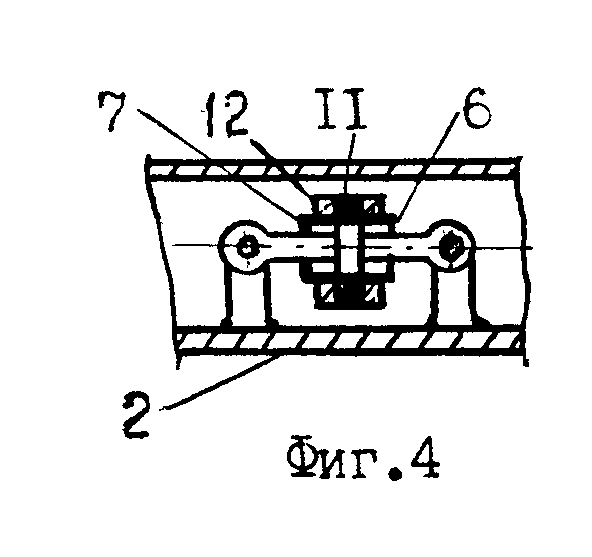
разрез по А-А на фиг. 1 вдоль оси хвостовика базовой балки; на фиг. 4 разрез по Б-Б на фиг. 3 вдоль оси двухстороннего домкрата, установленного в полости звена базовой балки.
Способ управления крепью в плоскости пласта осуществляется устройством, включающим базовую балку 1, состоящую из звеньев 2 с хвостовиками 3, концы которых связаны с гидродомкратами 4 смещения (управления) и расположенные между ними секции 5. При этом хвостовики 3 выполнены в виде двуплечих рычагов 6, шарнирно закрепленных на звеньях 2 базовой балки 1, причем концы хвостовиков 3 со стороны базовой балки снабжены механизмом фиксации 7. Механизм фиксации 7 выполнен в виде двухстороннего гидродомкрата 8, закрепленного в полости 9 звена 2 базовой балки 1, корпус 10 которого имеет упоры 11, а конец хвостовика 2 выполнен в виде вилки, в которой размещены упоры 11. Основание 13 (перекрытие, если базовая рамка у кровли пласта) каждой секции 5 связано с соответствующим звеном 2 базовой балки гидродомкратом передвижки 14.
Способ управления крепью в плоскости пласта посредством указанного устройства производится следующим образом.
При поступательном движении крепи (агрегата) поочередная передвижка базовой балки 1 с хвостовиками 3 и секций 5 крепи со взаимным боковым смещением базовой балки 1 с хвостовиками 3 относительно секций 5 крепи обеспечивается с помощью гидродомкратов 4 смещения (управления), связывающих концы хвостовиков 3 с продольной осью оснований 13 секций 5, и гидродомкратов 14 передвижки. Взаимное боковое смещение базовых балок и секций при поступательном движении крепи вслед за продвиганием забоя достигается с помощью поочередной подачи давления в поршневую или штоковую полость гидродомкратов 4 и 14.
Для передвижки крепи с подъемом по восстанию пласта смещение базовой балки 1 и секций 5 крепи в этом направлении производят последовательным поочередным разворотом хвостовика 3 на угол ψ относительно базовой балки 1 и затем завальной части секции 5 крепи в противоположную сторону от направления смещения базовой балки 1 при ее передвижке. Если угол разворота хвостовиков незначителен, что не предотвращает сползание крепи, то возможно увеличение угла j установки хвостовиков по отношению к базовой балке 1.
Если на нижнем конце крепи у нижнего борта лавы расположена секция 5 крепи, то поочередный разворот начинается с нее, а в случае нахождения у нижнего борта лавы хвостовика 3, разворот начинается с отклонения хвостовика 3 в направлении падения пласта посредством гидродомкрата 8 двухстороннего действия. Затем соответственно разворачивают вплотную к секции 5 хвостовик 3, либо секцию 5 к хвостовику 3 при ее передвижке с остаточным подпором к базовой балке 1 посредством гидродомкратов 4 и 14. Затем производят аналогичный разворот последующих хвостовиков и завальных частей секций вдоль всей крепи до верхнего борта лавы. Величину подъема (смещения) регулируем за счет изменения угла j установки (разворота) хвостовиков и секций крепи относительно базовой балки. На этом цикл разворота хвостовиков базовой балки и секций крепи заканчивается. Затем переводят поступательное передвижение крепи (агрегата) вслед за очистным забоем. При этом происходит передвижение крепи с подъемом по восстанию пласта на определенную величину смещения (подъема) в каждом шаге передвижки крепи вслед за очистным забоем. При поступательном движении крепи (агрегата) производительность по выемке пласта сохраняется, так как разворот хвостовиков и секций крепи производят лишь перед началом работы крепи (агрегата) и при передвижении (работе) крепи (агрегата) не повторяется при каждом шаге передвижки крепи.
При необходимости перемещения крепи (агрегата) с опусканием по падению пласта со смещением базовой балки и секций крепи в этом направлении производят разворот хвостовиков и завальных частей секций крепи относительно базовой балки в направлении пласта, начиная с верхнего конца крепи у верхнего борта лавы аналогично вышеописанной очередности.
В случае экстренного передвижения крепи с подъемом по восстанию или с опусканием по падению пласта при смещении базовой балки и секции крепи в соответствующем направлении имеется возможность производить одновременный разворот хвостовиков относительно базовой балки на величину свободного зазора между хвостовиками и секциями крепи.
Таким образом, предлагаемый способ управления крепью (агрегатом) в плоскости пласта и устройство для его осуществления позволяет обеспечивать повышение маневренности управления крепью, направленное (заданное) движение крепи в плоскости пласта с любым углом его падения без сползания крепи путем задания определенного (фиксированного) угла разворота хвостовиков базовой балки и соответственно секций крепи, без снижения производительности агрегата и при незначительных (минимальных) трудозатратах.
Источники информации.
1. Кузьмич А.С. Аксенов В.В. Автоматизированный очистной агрегат АКД-2 для тонких крутых пластов. М. ИГД им. А.А.Скочинского, 1969, с.14.
Кузьмич А.С. Аксенов В.В. Об основных принципах устройства прогрессивных агрегатов для выемки угля в очистных забоях. Уголь, N 1, 1974, с. 39-45.
Авторской свидетельство СССР N 1504353, кл. E 21 D 23/08, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1992 |
|
RU2065059C1 |
| СЕКЦИЯ БЕЗРАЗГРУЗОЧНОЙ БАЛЛОННОЙ КРЕПИ | 1991 |
|
RU2029095C1 |
| СЕКЦИЯ КРЕПИ ОЧИСТНОГО МЕХАНИЗИРОВАННОГО КОМПЛЕКСА | 1991 |
|
RU2027012C1 |
| Механизированная крепь | 1988 |
|
SU1765443A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1992 |
|
RU2065060C1 |
| Механизированная крепь | 1988 |
|
SU1765448A1 |
| Механизированная крепь для крутых пластов | 1987 |
|
SU1511428A1 |
| Устройство автоматического поддержания заданной толщины стружки очистного агрегата | 1979 |
|
SU881343A1 |
| Механизированная крепь для очистных забоев | 1985 |
|
SU1357584A1 |
| Агрегат для выемки угля | 1980 |
|
SU989091A2 |
Использование: при управлении механизированными комплексами и агрегатами, работающими на крутых пластах. Сущность изобретения: способ управления крепью в плоскости пласта, включает поочередную передвижку базовой балки с хвостовиками и секций крепи и разворот хвостовиков и секций относительно базовой балки в противоположную сторону от направления смещения базовой балки при ее передвижке. Разворот хвостовиков и секций крепи осуществляют перед передвижкой базовой балки. В процессе передвижки базовой балки при ее смещении одновременно разворачивают все хвостовики относительно базовой балки на величину свободного зазора между хвостовиками и секциями крепи. Устройство для осуществления способа включает базовую балку, состоящую из звеньев с хвостовиками в виде двуплечих рычагов, которые шарнирно закреплены на базовой балке и имеют механизм фиксации и гидродомкраты смещения. Последние установлены между хвостовиками и секциями крепи. Механизм фиксации установлен на плече рычага со стороны базовой балки и выполнен в виде двухстороннего гидродомкрата. Его корпус может иметь упоры, размещенные в вилке, выполненной на конце хвостовика. 1 з.п. ф-лы, 4 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выемочный комплекс для крутых пластов | 1980 |
|
SU1021787A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизированный комплекс для тонких крутых пластов с диагональным забоем | 1987 |
|
SU1504353A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
