Предлагаемый способ относится к области авиационного приборостроения н предназначен для точной выставки осп чувствительности гравиметра (ОЧГ) по линии отвеса (ЛО) при работе гравиметра в качестве датчика первичной информации при выполнении аэрогравиметрических работ на борту летательного аппарата (ЛА).
Известно [1], что ОЧГ должна быть выставлена во время съемочных работ на борту ЛА возможно более точно по ЛО, т.к. при любом отклонении ОЧГ от ЛО горизонтальные ускорения, возникающие при полете ЛА, являются причиной значительных ошибок в измерении вертикального ускорения.
Суть этого процесса заключается в совмещении осей Z1 и Z сопровождающего и приборного трехгранников, где:
1. Сопровождающий трехгранник X1Y1Z1, ось Z1 которого ориентирована по линии отвеса, а ось X1 - вдоль касательной к номинальной траектории полета (например, к ортодромии).
2. Приборный трехгранник X,Y,Z, связанный жестко с корпусом гравиметра, ось Z которого совпадает с ОЧГ, а оси Х и Y - с осями чувствительности "горизонтальных" акселерометров. Оба трехгранника ортогональные, правые.
Из изложенного выше очевидно, что суть настоящего предложения сводится к разработке способа формирования сигнала управления, обеспечивающей совмещения оси Z с осью Z1 с наименьшими ошибками при наименьших затратах.
Первую часть сформулированного выше требования наиболее просто выполнить, если установить гравиметр непосредственно на гироплатформу специальной инерциальной навигационной системы [2] платформенного типа, имеющей весьма точные горизонтальные акселерометры, гироскопы и внутренние следящие системы.
Применение дополнительной специальной ИНС для выставки оси чувствительности гравиметра, установленного на борту ЛА, по линии отвеса приводит к значительному удорожанию гравиметрической аппаратуры.
Известны способы управления угловым положением oceй чувствительности датчиков первичной информации, установленных на движущемся объекте при процедуре их первоначальной выставки [3] . Данные способы заключаются в следующем: на борту летательного аппарата имеется точная ИНС и ИНС-повторители (обычно менее точные и дешевые). В процессе полета непрерывно работает основная ИHC, а ИНС-повторители не работают. Приборный трехгранник основной ИНС с высокой точностью совмещается с сопровождающим. Приборные трехгранники ИНС-повторителей до начала их работы обычно ориентируются относительно корпуса, т.е. в горизонтальном полете занимают приблизительно положение сопровождающего трехгранника (с погрешностью 1...3 град.). Для приведения ИНС-повторителей в нормальное положение (т.е. с минимальной ошибкой положения приборного трехгранника относительно сопровождающего) устанавливается режим согласования ИИС-повторителя с точной работающей ИНС.
Известны 2 способа согласования [3].
В первом способе [3] сигналы управления положением приборного трехгранника ИНС-повторителя формируются по невязке показаний датчиков угла, установленных на осях кардановых подвесов точной ИНС и ИНС-повторителей. При данном способе возникает неустранимая ошибка ориентации осей XiYiZi (i - номер повторителя) относительно осей X1Y1Z1. В лучшем случае она составляет 0.5... 1 угловую минуту. Данная ошибка на порядок превышает современные требования к установке ОЧГ.
Второй способ, наиболее близкий к предлагаемому, - "векторное согласование" [3] . Суть этого способа заключается в следующем: после приведения ИНС-повторителей в рабочее состояние (т.е. после разарретирования) измеряются сигналы, пропорциональные горизонтальным ускорениям, действующим на "горизонтальные" акселерометры ИНС-повторителей, которые грубо (с погрешностью 1. . .3 град.) ориентированы так же, как на точной ИНС. По сигналам акселерометров ИНС и ИНС-повторителя формируют сигнал невязки, который затем преобразуют в сигнал управления положением осей XiYiZi (i - номер повторителя). Анализ показывает [3] , что для выполнения этой операции с погрешностью ≅0,1 угловой минуты требуется выполнение летательным аппаратом точного маневра в горизонтальной плоскости, что совершенно неприемлемо для непрерывного режима выставки ОЧГ по ЛО при съемочных работах.
Таким образом, известные способы формирования сигнала управления положением оси чувствительности датчиков первичной информации, установленных на движущемся объекте, при дистанционной выставке по линии отвеса либо не обеспечивают требуемой точности, либо не могут быть применимы, когда в качестве датчика первичной информации используется гравиметр.
Цель предлагаемого изобретения - обеспечение дистанционной выставки ОЧГ, установленного на борту ЛА, относительно ЛО с требуемой для аэрогравиметрическнх работ точностью (~0,1 угл. минута).
Поставленная цель достигается тем, что так же, как и в известном способе, основанном на формировании управляющего сигнала согласующего положения оси чувствительности гравиметра с осью "Z" сопровождающего трехгранника, измеряют сигналы, пропорциональные горизонтальным ускорениям, действующим на гравиметр, установленный на платформе-повторителе. Кроме того, по совокупности сигналов, полученных с помощью бортовой ИНС, соответствующих углам курса, крена, тангажа, приращениям скорости, вызванным ускорением Кориолиса, и радиусам кривизны, формируют сигнал, соответствующий угловой скорости оси чувствительности гравиметра. Затем определяют разность между этим вновь сформированным сигналом и сигналом, соответствующим угловой скорости сопровождающего трехгранника, вычисленного с помощью бортовой ИНС.
Суть предлагаемого способа состоит в формировании сигнала управления, обеспечивающего организацию движения ОЧГ относительно Земли с угловой скоростью, равной соответствующей угловой скорости ЛО, проходящей через центр масс летательного аппарата при его движении вдоль поверхности Земли. Сигнал управления в этом случае формируется по невязке угловых скоростей осей Z1 (повторитель) и Z (считая ее совмещенной с осью Z1 приборного трехгранника точной ИНC).
Сопоставительный анализ с известными в этой области объектами техники показал, что совокупность существенных признаков предлагаемого способа является новой.
Рассмотрим более подробно предлагаемый способ, который может быть проиллюстрирован функциональной блок-cxeмoй фиг.1.
Так же, как и в известном способе векторного согласования, в предлагаемом способе измеряют сигналы горизонтального ускорения (aх, aу) с помощью "горизонтальных" акселерометров (оси чувствительности которых ортогональны ОЧГ) повторителя (1), интегрируют их (3), вычисляют проекции на оси сопровождающего трехгранника (4), для чего используют информацию об углах курса (ψ), крена (γ) и тангажа (ϑ), получаемую от ИНС (2). В результате этой oперации формируются сигналы о приращении cкopocтей ΔWx1 и ΔWy1, к которым добавляют приращения скоростей, вызванные ускорениями Кориолиса (5), вычисляемые по приращениям линейной (ΔVx1 и ΔVy1) и угловой (Δωx1 и Δωy1) скоростей, поступающих из ИHC (2). В результате формируются сигналы, соответствующие полным приращениям относительных линейных скоростей (ΔVx1 и ΔVy1). По этим приращениям вычисляются сигналы, соответствующие приращениям yгловых скоростей поворота сопровождающего тpexгранника (6) - Ωx1 и Ωy1, а затем и величины невязок (7) Ω
Источники информации
[1] - Юзефович А.П., Огородова Л.В. "Гравиметрия". М.: "Недра", 1984 г., с. 179...186, 206...216, 231...234.
[2] - Андреев В.Д. "Теория инерциальной навигации". М.: Наука, 1966 г., с. 16...54, 367...399.
[3] - А. Липтон. "Выставка инерциальных систем на подвижном основании". М.: Наука, 1971 г., с. 122...127.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2723976C1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 2001 |
|
RU2219496C2 |
| Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе | 2022 |
|
RU2794283C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| АВТОНОМНАЯ КОРРЕКТИРУЕМАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2629658C2 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
Изобретение относится к области авиационного приборостроения и может быть использовано при аэрогравиметрических работах, где в качестве датчика первичной информации используется гравиметр. Суть способа заключается в том, что по совокупности сигналов, измеренных с помощью бортовой инерциальной навигационной системы, установленной на летательном аппарате, соответствующих углам курса, крена и тангажа, приращениям скорости, вызванным ускорением Кориолиса, и радиусов кривизны, формируют сигнал, соответствующий угловой скорости оси чувствительности гравиметра. Определяют разность между этим вновь сформированным сигналом и сигналом, соответствующим угловой скорости сопровождающего трехгранника, вычисленного с помощью бортовой инерциальной навигационной системы. По сигналу невязки угловых скоростей реального движения оси чувствительности гравиметра и линии отвеса, реализованной в точной инерциальной навигационной системе, формируют сигнал управления положением оси чувствительности гравиметра. Технический результат состоит в повышении точности дистанционной выставки оси чувствительности гравиметра. 1 ил.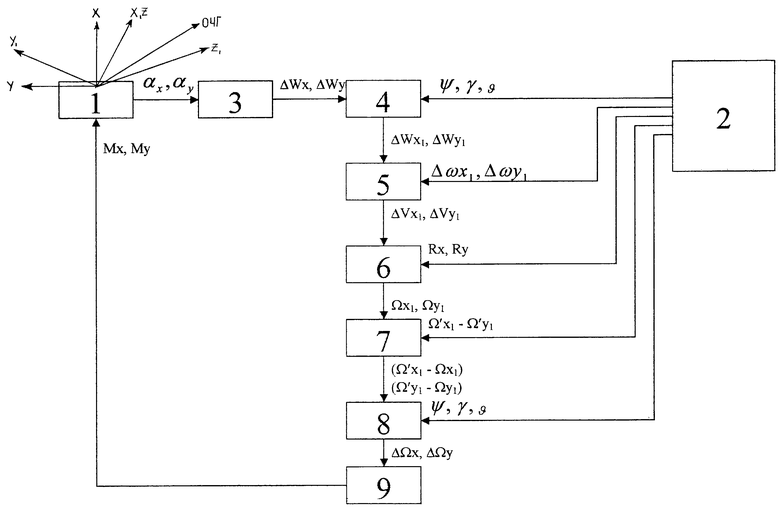
Способ формирования сигнала управления положением оси чувствительности гравиметра, установленного на борту летательного аппарата (ЛА), при его дистанционной выставке по линии отвеса, заключающийся в измерении сигналов, пропорциональных горизонтальным ускорениям, действующим на гравиметр, установленный на платформе-повторителе, и формировании управляющего сигнала, согласующего положение оси чувствительности гравиметра с осью сопровождающего трехгранника, совпадающей с линией отвеса, отличающийся тем, что по совокупности сигналов, измеренных с помощью бортовой инерциальной навигационной системы, установленной на ЛА, соответствующих углам курса, крена, тангажа, приращениям скорости, вызванным ускорением Кориолиса, и радиусов кривизны, формируют сигнал, соответствующий угловой скорости оси чувствительности гравиметра, определяют разность между этим вновь сформированным сигналом и сигналом, соответствующим угловой скорости сопровождающего трехгранника, вычисленного с помощью бортовой инерциальной навигационной системы, и по сигналу невязки угловых скоростей реального движения оси чувствительности гравиметра и линии отвеса, реализованной в точной инерциальной навигационной системе, формируют сигнал управления положением оси чувствительности гравиметра.
| ЛИПТОН А | |||
| Выставка инерциальных систем на подвижном основании | |||
| - М.: Наука, 1971, с.122-127 | |||
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2120608C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1994 |
|
RU2098765C1 |
| US 5359889 А, 01.11.1994 | |||
| ПОДВЕСНОЙ СВОД МАРТЕНОВСКОЙ ПЕЧИ | 0 |
|
SU368457A1 |

