Заявляемое техническое решение относится к области систем наведения приборов, расположенных на качающемся основании, например судовых локаторов, приборов аэрофотосъемки и т.п.
Известна система стабилизации (см. [1] с.36, рис.2.1), состоящая из последовательно соединенных измерителя качек и устройства перемещения, причем выходной вал устройства перемещения кинематически связан с корпусом измерителя качек.
Недостатком этой системы является уход (дрейф оси чувствительности) в измерителе качек (подробнее см. [2] с.180 187). В результате устройство перемещения непрерывно смещает стабилизируемый прибор с заданного направления.
Наиболее близким к предлагаемому способу компенсации уходов устройства наведения и стабилизации является описанный в [1] с.44. Этот способ характеризуется подачей на выход устройства наведения и стабилизации сигнала, величина которого определяется, исходя из средней скорости ухода.
Недостатком этого способа является то, что из-за неточного задания средней скорости величина ошибки с течением времени нарастает, кроме того, из-за нестабильности скорости ухода (см. [3] с.115 120) уход имеет место даже при точном задании среднего значения.
Целью настоящего изобретения является повышение точности компенсации ухода и за счет этого повышение точности устройства наведения и стабилизации.
Для достижения этой цели способ наведения и стабилизации приборов, расположенных на качающемся основании, заключающийся в том, что измеряют качки и осуществляют перемещение привода наведения в соответствии с заданным сигналом управления, измеренными качками и сигналом компенсации ухода оси чувствительности измерителя качек, изменяется следующим образом: перед подачей на вход производится измерение сигнала на выходе устройства наведения и стабилизации, сравнение его с ожидаемым значением реакции на сигнал управления, из полученной разности отфильтровывается составляющая, вызванная качками, полученная величина корректируется с целью обеспечения устойчивости и точности замкнутого круга, после чего результат вычитают из заданного сигнала управления.
Был проведен анализ схем построения известных типов устройств наведения и стабилизации. Известна система ([10] с.137, рис. 3.2), состоящая из последовательно соединенных гиротахометра и привода наведения. При этом привод наведения имеет также вход управления для обеспечения разворота в заданное положение. Недостатком этого устройства являются большие уходы, что приводит к большим ошибкам.
Наиболее близким к предлагаемому является устройство наведения и стабилизации, описанное в [1] с.197, рис.6.13. В этом устройстве имеется блок измерения качек и перемещения, на первый вход которого подается сигнал наведения, а на второй сигнал компенсации ухода. При этом блок измерения качек и перемещения состоит из последовательно соединенных измерителя (гиротахометра) и привода наведения, выходной вал которого кинематически связан с измерителем качек и наводимым прибором. Привод, в свою очередь, состоит из механической передачи, связанной с нагрузкой и датчиком угла, двигателя и блока управления (сравни с [11] с. 6 8).
Недостатком этого устройства наведения и стабилизации является недостаточная точность из-за растущей с течением времени ошибки вследствие неполной компенсации ухода.
Для повышения точности устройства наведения и стабилизации за счет использования предлагаемого способа наведения и стабилизации в устройство наведения и стабилизации, содержащее блок измерения качек и перемещения, введены последовательно соединенные блок моделирования, измеритель рассогласования, подавитель сигнала качек, дискриминатор и блок коррекции контура компенсации ухода. При этом первый вход блока измерения качек и перемещения (вход управления) соединен с входом блока моделирования, второй вход с вторым выходом измерителя рассогласования.
Все используемые составные части являются известными. В качестве блока измерения качек и перемещения может использоваться прототип. Измеритель рассогласования, дискриминатор, блок моделирования, блок коррекции контура компенсации ухода могут быть реализованы, как это указано в [4] (см. соответственно с.24, рис.1-1б, с.51, рис.2.2, с.25 50), с учетом того, что передаточные функции блоков могут быть определены по алгоритмам, приведенным, например, в [5] с. 460 513, [9] с.193 336.
Повышение точности предлагаемого способа по сравнению с прототипом достигается за счет следующих операций. Известно (см. [5] с.140 141), что в замкнутом контуре с отрицательной обратной связью выходная величина от возмущения уменьшается в (1 + Фp) раз, где Фp передаточная функция разомкнутого контура. Однако непосредственное замыкание выхода на вход приведет к уменьшению в той же пропорции на выходе составляющих от сигнала управления и качек, и положительный эффект достигнут не будет. Поэтому необходимо внутри контура подавить в цепи обратной связи составляющие от сигнала управления и качек. Для этого осуществляется формирование ожидаемой реакции устройства наведения и стабилизации на сигнал управления и из него вычитается замеренное на выходе значение сигнала. Из полученной разности отфильтровывается неинформативная часть сигнала составляющая от качек. Чтобы замкнутый контур по сигналу ухода был устойчив, остаток перед подачей на вход устройства наведения и стабилизации пропускается через корректирующее устройство.
Для исключения сигнала качек предложено использовать информацию о его ожидаемом уровне и частотном составе. При этом (см. фиг.1) осуществляется подавление сигнала качки по амплитуде в подавителе сигнала качек (ПСК) 3, а затем его исключение с помощью дискриминатора 5. При этом из-за нелинейности проводимой операции подключение блоков может быть осуществлено только в указанном порядке и ни один из них в отдельности не обеспечит требуемого эффекта. Рассмотрим варианты построения цепи коррекции.
Вариант А. Подавитель сигнала качек отсутствует. Тогда зона дискриминатора для условий, приведенных далее в примере конкретной реализации, будет не менее ±10o. То есть компенсация ухода будет осуществляться лишь после того, как уход измерительной оси достигнет 10o, что, очевидно, неприемлемо.
Вариант Б. Имеется только подавитель сигнала качек без дискриминатора. Тогда образуется замкнутый контур с отрицательной неединичной обратной связью по сигналу качек. В результате блок измерения качек и перемещения 2 (БИКП) будет неправильно отрабатывать сигнал качек. То есть не будет осуществляться точная стабилизация, что также не приемлемо.
Вариант В. Дискриминатор установлен перед ПСК. Тогда, если зона дискриминатора больше-равна возможной амплитуде колебаний, справедливо сказанное в варианте А, если меньше в варианте Б.
И только если дискриминатор 5 установить после ПСК 3, можно добиться требуемой точности стабилизации и обеспечить, чтобы компенсация скорости ухода осуществлялась при величине ухода не больше заданной.
Из сказанного выше ясно, что формировать контур по сигналу ухода можно, лишь гарантированно исключив составляющую качек. Поэтому блок коррекции контура компенсации ухода (БКККУ) 6 стоит после ПСК и дискриминатора. Необходимость его обусловлена тем, что в замкнутой системе точность компенсации возмущения тем выше, чем больше коэффициент разомкнутого контура на частоте возмущения, то есть этот блок также необходим для достижения цели изобретения. Но, как видно из приведенного выше, использование только этого блока, аналогично тому, что описано в варианте Б, не может обеспечить само по себе повышение точности устройства наведения и стабилизации.
Таким образом, использование последовательно соединенных ПСК, дискриминатора и БККУ необходимо для достижения цели изобретения и обеспечивает сверхсуммарный эффект.
На фиг.1 приведена функциональная схема устройства наведения и стабилизации. На схеме указаны последовательно соединенные блок моделирования 1, измеритель рассогласования 4, подавитель сигнала качек 3, дискриминатор 5, блок коррекции контура компенсации ухода 6, блок измерения качек и перемещения 2. Вход управления блока измерения качек и перемещения соединен с входом блока моделирования, а выход с вторым входом измерителя рассогласования.
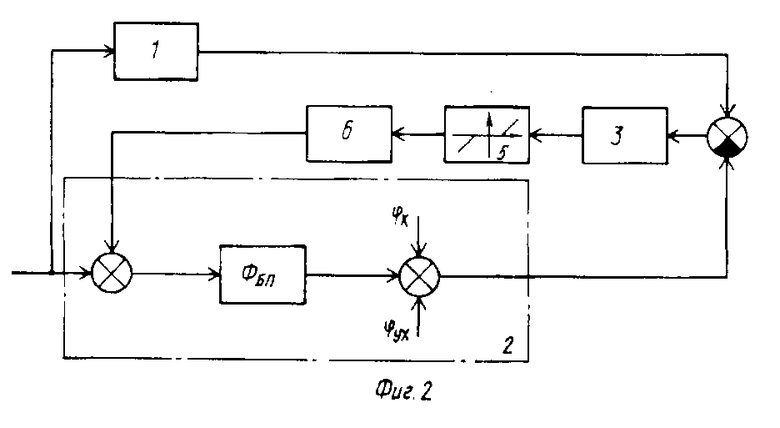
Для пояснения работы рассмотрим структурную схему (фиг.2). На фиг. 2 ФБМ, ФБП, ФПК, ФК передаточные функции соответственно блока моделирования 1, блока измерения качек и перемещения 2, подавителя сигнала качек 3 и блока коррекции контура компенсации ухода 6. На вход блока моделирования и второй вход блока измерения качек и перемещения подается сигнал управления наведением.
При этом передаточная функция блока моделирования должна удовлетворять условию
ФБМ ФБП (1)
в диапазоне частот наведения. Это необходимо для того, чтобы исключить на выходе измерителя рассогласования 4 составляющую, определяемую сигналом управления наведением. Блок измерения качек и перемещения выполняет следующие функции:
1) перемещение прибора в соответствии с сигналом наведения;
2) компенсацию колебаний основания.
Чтобы обеспечить выполнение обеих этих функций, обычно используют три основных варианта.
Во-первых, использование измерителя качек, устанавливаемого на стабилизирующем приборе, например гиротахометра, выход которого соединен с входом привода наведения, осуществляющего перемещение прибора (см. [1] рис.6.13). В этом случае входом блока измерения качек и перемещения является второй вход привода наведения.
Во-вторых, использование измерителя качек с входом управления прецессией, например гиродатчика угла, устанавливаемого на стабилизируемом объекте, вход которого соединен с входом привода наведения, перемещающего прибор (см.[2] с.99 108, рис.3.5). В этом варианте входом управления наведением является вход управления прецессией измерителя качек.
В-третьих, использование измерителя качек, расположенного на подвижном основании, причем выход измерителя качек через преобразователь координат соединен с входом привода наведения, перемещающего прибор. Сигнал о повороте привода выдается в преобразователь координат ([2] с.259 262). При таком построении блока измерителя качек и перемещения сигнал управления наведением подается на один из входов преобразователя координат.
Кроме полезной составляющей в перемещении выходного вала блока измерения качек и перемещения присутствует составляющая ухода. При этом уход может вызываться как неидеальностью гиродатчика, так и неидеальностью привода.
В измерителе рассогласования 4 из сигнала с блока моделирования 1 вычитается сигнал с блока измерения качек и перемещения 2. В качестве измерителя сигнала перемещения могут использоваться, например, кинематически связанные с выходным валом блока измерения качек и перемещения датчики угла (потенциометры, вращающиеся трансформаторы, сельсины и т.п.) или датчики скорости (тахогенераторы, датчики Холла, гиротахометры и т.д.) С учетом (1) сигнал на выходе измерителя рассогласования будет содержать только составляющие от качек и ухода и не будет содержать только составляющей от сигнала наведения. Для формирования сигнала компенсации ухода необходимо исключить составляющую качек. С этой целью сигнал с выхода измерителя рассогласования пропускается через последовательно соединенные подавитель сигнала качек 3 и дискриминатор 5. Передаточная функция подавителя сигнала качек и величина зоны нечувствительности дискриминатора могут быть определены из условий:
где ΦК функция качки;
Φyx функция возмущений, вызывающих уход;
δ величина зоны нечувствительности;
L-1 обратное преобразование Лапласа;
vдоп ограничение на величину ухода.
В результате на выходе дискриминатора 5 остается только составляющая, обусловленная уходом блока измерения качек и перемещения 2. Через блок формирования сигнала компенсации сигнал, вызванный уходом, поступает на вход блока измерения качек и перемещения. То есть возмущения, вызывающие уход, оказываются внутри контура с отрицательной обратной связью. Если передаточную функцию по уходу обозначить Фух, то в контуре должно выполняться соотношение
где Φмакс>Φдоп максимально допустимая величина ухода.
При этом в соответствии с теорией автоматического регулирования ([5] с. 140 141)
где КД коэффициент передачи дискриминатора.
Следовательно, передаточная функция блока коррекции контура компенсации ухода 6 выбирается из условия обеспечения устойчивости контура и требуемой точности. Желательно, кроме того, чтобы сигнал компенсации не обнулялся, когда значение составляющей от ухода на входе дискриминатора становится меньше зоны нечувствительности. Поэтому целесообразно выполнять блок коррекции контура компенсации ухода с астатизмом (наличием интегрирующих элементов). Как видно из (5), использование контура с обратной связью позволяет уменьшить уход в /1 + КДФКФБПФПК/ раз.
Таким образом, повышение точности устройства наведения и стабилизации достигается за счет того, что из выходного сигнала блока измерения качек и перемещения 2 с помощью измерителя рассогласования 4, блока моделирования 1, подавителя сигнала качек 3 и дискриминатора 5, соединенных, как указано на фиг.1, выделяется составляющая, вызываемая уходом, которая через блок коррекции контура компенсации ухода 6 подается на вход блока измерения качек и перемещения.
Данное устройство является одним из примеров реализации способа, характеризующегося сравнением выходного сигнала с ожидаемым значением реакции на сигнал управления, отсечкой неинформативной части полученного значения (составляющей качек) с последующей коррекцией сигнала и подачей его на вход устройства наведения и стабилизации.
В отличие от системы (см. [6] с.21, рис.4), заявляемая содержит модель, адекватную объекту регулирования в полосе частот управления, и поэтому не имеет ограничений по виду передаточной функции объекта регулирования. Система обеспечивает, чтобы ее выходной сигнал соответствовал сумме сигнала управления по наведению и измеренной величине качки, чего не может делать указанная система. Корректирующее устройство выполняется с астатизмом (интегрированием), а не дифференцирующим, что обеспечивает дополнительное подавление шумовой составляющей.
В заявляемой системе, учитывая низкочастотный спектр ухода БИКП, предложено реализовать БКККУ с астатизмом. В отличие от [8] (Кузовков Н.Т. "Модальное управление и наблюдающие устройства". М. Машиностроение, 1976, с. 116, в предлагаемом устройстве для формирования входного сигнала на интегратор не требуется знать оценки значений переменных вектора состояний объекта регулирования ([8] с.115, 118). Оценка вектора состояний является сложной технической задачей, решение которой в [8] предложено только для класса линейных систем. Более того, для реализации управления в соответствии с [8] необходимо иметь следующую априорную информацию: матрицу вектора воздействия возмущений с точками воздействия ([8] с.115, 116, 94) и зависимости неизмеряемых возмущений от измеряемых параметров расширенной модели в данном случае носителя ([8] с.94).
Следует также отметить, что предложенное в [8] с.116, измерение возмущений возможно лишь в системе, где вектор управления формируется, исходя из оценки вектора состояний ([8] с.96).
Следовательно, заявляемая система не может быть отнесена к системам, описываемым в [8] с.116, т.к.
1) модель системы использует только входной сигнал управления, а не сформированный ей же, исходя из измерений составляющих вектора состояния объекта регулирования, управление (тем более, что даже не все сигналы управления могут быть измерены);
2) модель системы не использует параметров вектора состояния объекта регулирования для формирования сигнала на входе интегрирующего устройства;
3) контур коррекции в заявляемой системе нелинейный в отличие от систем, описываемых в [8]
4) объект регулирования в заявляемой системе может содержать любые нелинейности, в то время, как в [8] объект регулирования должен быть линейным.
Кроме того, в предлагаемой системе элемент, обеспечивающий астатизм, не является изолированным, а входит в состав корректирующей цепи ПСК - дискриминатор БКККУ. Это позволяет использовать его в качестве запоминающего устройства сигнала компенсации ухода в период, когда величина ухода меньше зоны дискриминатора (в это время контур коррекции можно считать разомкнутым).
В результате увеличивается период времени, когда система работает с разомкнутым контуром коррекции, что является положительным фактором для нелинейных объектов регулирования, для которых не соблюдается принцип суперпозиции и в процессе совместной работы контура наведения и контура коррекции из-за динамичного изменения сигнала коррекции из-за динамичного изменения сигнала коррекции могут возникать кратковременные дополнительные ошибки в наведении, хотя и не превышающие заданной допустимой величины.
Рассмотрим пример конкретного выполнения составных частей устройства наведения и стабилизации. Пусть блок измерения качек и перемещений аналогичен прототипу, тогда его передаточная функция по сигналу управления (см. [7] с. 193, [3] с.58) будет:
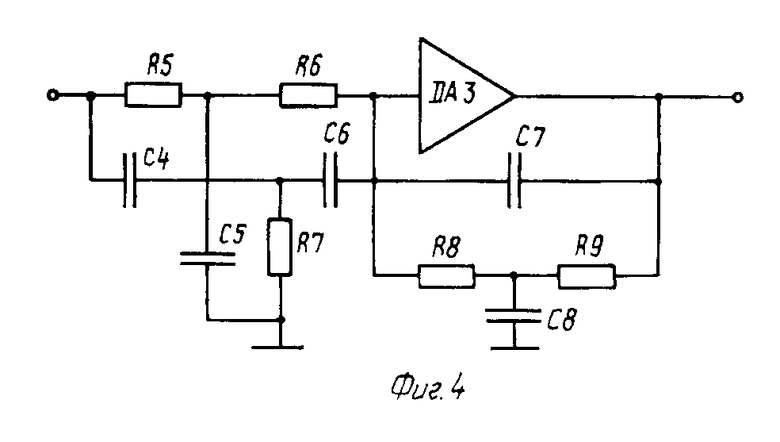
Соответственно, исходя из (1), такой же будет передаточная функция блока моделирования. Следовательно, блок моделирования может быть реализован, как указано на фиг. 3. Спектр качек определяется в большинстве случаев механическими характеристиками конструкции и представляет собой, как правило, одновершинную функцию с максимумом на частоте 0,15 1,5 Гц. Поэтому целесообразно в качестве подавителя сигнала качек использовать режекторный фильтр с передаточной функцией:
где ωм частота максимума спектральной характеристики.
Реализация подавителя сигнала качек приведена на фиг.4.
Максимально допустимую величину ухода можно оценить из следующих соображений:
неточность устройства наведения и стабилизации определяется суммой величины ухода и ошибки измерения качки, им вызываемой, тогда
Φмакс+AкsinΦмакс≅Δ (6)
где Δ требуемая точность;
A амплитуда качки.
Если D 1 мрад, а АК 10o, то vмакс 0,85 мрад.
Поскольку уход является функцией с медленно меняющейся скоростью величиной от 0,5 до 1,5 мрад/с, в качестве блока коррекции контура компенсации ухода с учетом требования к астатизму целесообразно использовать изодробный фильтр с передаточной функцией (реализацию смотри [5] с. 254):
Тогда передаточная функция по уходу примет вид:
Наличие двукратного символа дифференцирования в числителе показывает, что сигнал с постоянной скоростью будет полностью подавляться. Тогда постоянная Т3 выбирается из условия компенсации фазового запаздывания на низких частотах (менее ωм). Коэффициент К3 выбирается в этом случае из условия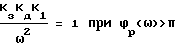
где vp фазовое запаздывание разомкнутого контура на частоте ω.
Выбор зоны нечувствительности дискриминатора осуществляется следующим образом. Так как, учитывая вышесказанное, частота среза замкнутого контура (0,5 0,6)wм, то время регулирования Тр будет не более, чем  (см. [5] с. 319), для приведенных числовых данных 1,3 с. Для максимального изменения величины скорости ухода 0,5 мрад./с, аппроксимируя переходный процесс треугольной функцией, получаем верхнюю оценку для динамической ошибки
(см. [5] с. 319), для приведенных числовых данных 1,3 с. Для максимального изменения величины скорости ухода 0,5 мрад./с, аппроксимируя переходный процесс треугольной функцией, получаем верхнюю оценку для динамической ошибки
Φош≅ 0,5Tp•ΔΦ = 0,48 мрад.
Тогда зона нечувствительности равна
δ = Φмакс-Φош= 0,37 мрад.
Приведенный пример показывает, что даже при изменении скорости ухода на величину, сравнимую с ее средним значением, угол ухода не превышает допустимой величины, в то время как в прототипе уход будет нарастать с течением времени и превысит допустимое значение при тех же прочих условиях за 1,7 с.
Использованные источники
1. Автоматическая стабилизация оптического изображения. Л. Машиностроение, 1988.
2. Репников А.В. Сачков Г.П. Черноморский А.П. Гироскопические системы. М. Машиностроение, 1983.
3. Северов Л.А. Гиростабилизаторы инерциальных систем управления. Л. издательство ЛГУ, 1979.
4. Тетельбаум И.М. Шнейдер Ю.Р. "400 схем для АВМ". М. Энергия, 1978.
5. Бесекерский В.А. Попов Е.П. Теория систем автоматического регулирования. М. Наука, 1966.
6. Громыко В.Д. Самонаводящиеся системы с моделью. М. Энергия, 1974.
7. Александров А.Г. Синтез регуляторов многомерных систем. М. Машиностроение, 1986.
8. Кузовков Н.Т. Модальное управление и управляющие устройства. М. Машиностроение, 1976.
9. Пальтов И.П. Качество процессов и синтез корректирующих устройств в нелинейных автоматических системах. М. Наука, 1975.
10. Свершников А.А. Ривкин С.С. Вероятностные методы в теории гороскопа. М. Наука, 1974.
11. Чиликин М.Г. Сандлер А.С. "Общий курс электропривода". Учебник для вузов, 6-е издание, доп. и перераб. М. Энергоиздат, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |

Изобретение относится к области систем наведения приборов, расположенных на качающемся расстоянии, например судовых локаторов, приборов аэрофотосъемки и т.п. Целью настоящего изобретения является повышение точности компенсации ухода и за счет этого повышение точности устройства наведения и стабилизации. Способ наведения и стабилизации приборов, расположенных на качающемся основании, заключается в том, что измеряют качки и осуществляют перемещение привода наведения в соответствии с заданным сигналом управления, измеренными качками и сигналом компенсации ухода оси чувствительности измерителя качек. Для формирования сигнала компенсации ухода оси чувствительности измерителя качек измеряют сигнал, характеризующий перемещение привода наведения, измеренный сигнал сравнивают с ожидаемым значением, из сформированного разностного сигнала отфильтровывают составляющую, вызванную качками, полученный сигнал корректируют и сформированный таким образом сигнал компенсации ухода оси чувствительности измерителя качек вычитают из заданного сигнала управления, причем коррекцию осуществляют, исходя из условия требуемой устойчивости и точности. Устройство наведения и стабилизации приборов, расположенных на качающемся основании, содержит блок измерения качек и перемещения, первый вход которого является входом управления устройства, а выход является выходом устройства, последовательно соединенные блок моделирования, вход которого соединен с входом управления устройства, измеритель рассогласования, подавитель сигнала качек, дискриминатор и блок коррекции контура компенсации ухода, выход которого соединен с вторым входом блока измерения качек и перемещения, выход которого соединен с вторым входом измерителя рассогласования. 2 с. и 2 з.п.ф-лы, 4 ил.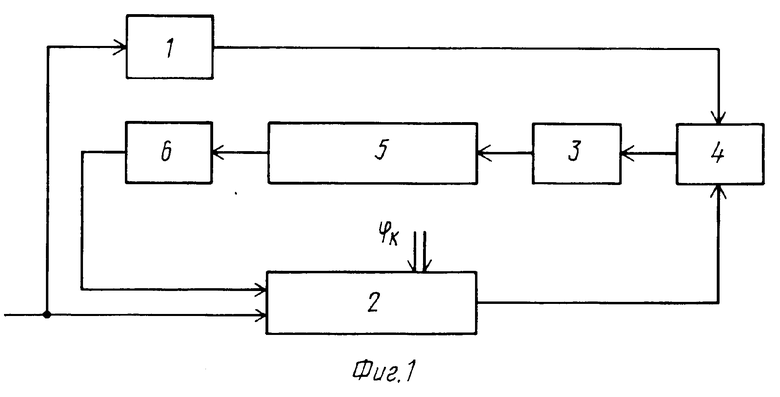
| Д.Н.Еськов и др | |||
| Автоматическая стабилизация оптического изобрадения | |||
| - Л.: Машиностроение, 1988, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Там же, с | |||
| Способ утилизации отработанного щелока из бучильных котлов отбельных фабрик | 1923 |
|
SU197A1 |

