Изобретение относится к области систем наблюдения и сопровождения за объектами в пространстве, преимущественно с подвижного основания.
Известна телевизионно-оптическая система сопровождения со следящим стробом, содержащая телекамеру, телевизионный автомат, в который входят устройство обработки видеосигнала, решающее устройство, интегратор и задающее устройство, а также исполнительное устройство (привод наведения) ([1] с.232, рис.7.17).
Недостатком данной системы являются достаточно большие рассогласования между положением оптической оси оптико-электронного прибора (телекамеры) и линией визирования при сопровождении динамичных объектов с подвижного основания из-за отсутствия системы стабилизации оптической линии визирования и инерционности исполнительного привода.
Известно также оптико-электронное устройство ([2] с.110-112, рис.3.23), состоящее из связанных между собой оптико-электронного пеленгатора и привода с усилителем мощности. Эта система имеет входы приема оптического сигнала, внешнего целеуказания и коррекции. В процессе сопровождения разворот пеленгатора на объект осуществляется приводом по сигналам от пеленгатора. Недостатком этой системы является отсутствие измерителей качек, что затрудняет использование этой системы на носителях, подверженных воздействию качек. Кроме того, отсутствие функциональных блоков для выдачи точных координат объекта относительно оптической оси оптико-электронного пеленгатора не позволяет осуществлять автозахват объекта на сопровождение.
Известна следящая система ([2] с.228, 229, рис.6.7), состоящая из последовательно соединенных датчика поступательного движения, вычислителя, гиростабилизатора, пеленгатора и усилителя мощности, выход которого соединен со вторым входом гиростабилизатора. Данная система позволяет осуществлять работу с качающегося основания. Однако в связи с тем, что для стабилизации используется гиропривод, отсутствует практическая возможность стабилизации массивных оптических приборов, т.е. приборов с большими фокусными расстояниями и диаметрами входного зрачка. Это не позволяет обеспечить сопровождение объектов, находящихся на большой дальности либо имеющих малый контраст относительно фона. Эта система также неспособна к автоматическому захвату объекта на сопровождение.
В литературе описана также следящая система ([2] с.229, 230, рис.6.8), состоящая из последовательно соединенных датчика угловой скорости, сумматора, усилителя мощности, двигателя и пеленгатора. Выход пеленгатора соединен со вторым входом сумматора. В этой системе датчик угловой скорости, сумматор, усилитель мощности и двигатель выполняют функции устройства наведения и стабилизации. В данной системе захват объекта на автосопровождение возможен лишь путем точного совмещения изображения объекта со стробом (окном анализа), что затруднительно при значительном рассогласовании положений объекта и строба в картинной плоскости пеленгатора. Кроме того, отсутствие устройств для динамической коррекции не позволяет в достаточной мере реализовать возможности исполнительного устройства.
Наиболее близким к предлагаемому изобретению является телевизионно-оптическая система ([3] с. 8 и 9, рис.4), содержащая последовательно соединенные телевизионный датчик, устройство усиления и обработки сигнала, вычислительное устройство (в совокупности образующие пеленгатор) и исполнительный орган. Исполнительный орган, выполняющий функции блока наведения и стабилизации, кинематически связан с оптико-электронным (телевизионным) прибором пеленгатора.
В известной системе переход в автоматический режим осуществляется посредством предварительного разворота пеленгатора на предназначенный для сопровождения объект таким образом, чтобы он оказался в пределах окна захвата внутри поля зрения. При этом в известной системе возникают недопустимые переходные процессы при переходе на автосопровождение. Это обусловлено тем, что при увеличении угловых скоростей и ускорений перемещения изображения объекта относительно фотоприемника (оптической оси пеленгатора) вероятность перехода в автоматический режим сопровождения падает. Это объясняется падением контраста изображения объекта, перемещающегося относительно растра (см. [3] с. 209-212). Данное обстоятельство может приводить к срыву автосопровождения и существенно влияет на точность сопровождения из-за искажения образа объекта (появления шлейфа за движущимся относительно растра изображением объекта). Переходные процессы вызываются следующими обстоятельствами. Пусть данные по целеуказанию поступают от одной из систем комплекса, куда входит оптико-электронная система, например локационной станции. При этом на момент автозахвата оптико-электронной системой всегда имеется начальное рассогласование между положением изображения объекта и оптической осью визирования оптико-электронного прибора (3 мрад и более) ввиду неизбежных ошибок как задания целеуказания, так и динамических ошибок блока наведения и стабилизации при парировании качек основания. Телевизионный автомат пеленгатора определяет координаты изображения объекта и выдает сигналы, пропорциональные величине рассогласования относительно центра телевизионного растра. Данные сигналы рассогласования поступают на блок наведения и стабилизации, стремящийся совместить положение изображения объекта (линию визирования) с оптической осью оптико-электронного прибора пеленгатора. Даже при относительно небольшом коэффициенте разомкнутого контура Краз = 25-30 1/с2 начальное рассогласование приводит к недопустимой скорости перемещения изображения объекта относительно фотоприемника. Ввиду смазывания изображения и потери контраста может происходить срыв автосопровождения (см. [1] с.137, 138). Аналогичный эффект может наступить даже при использовании относительно безинерционных приемников, если используется межкадровое накопление сигнала в пеленгаторе. В результате для обеспечения устойчивого перехода на автосопровождение требуется, как минимум, избыточное отношение сигнал/шум от изображения объекта, что, помимо выше указанных недостатков, приводит также и к уменьшению дальности, на которой возможен переход на автосопровождение.
Задачей предлагаемого изобретения является повышение вероятности перехода на автосопровождение, увеличение максимальной дальности возможного перехода на автосопровождение и повышение точности сопровождения объектов следящей оптико-электронной системой.
Для достижения указанной задачи в оптико-электронную систему, содержащую последовательно соединенные блок наведения и стабилизации и оптико-электронный пеленгатор, введены последовательно соединенные преобразователь координат из измерительной системы пеленгатора в стабилизированную систему координат, схема плавного ввода ошибки, корректирующее устройство, преобразователь стабилизированных координат в исполнительную систему координат блока наведения и стабилизации. При этом вход преобразователя координат из измерительной системы пеленгатора в стабилизированную систему координат соединен с выходом оптико-электронного пеленгатора, а выход преобразователя стабилизированных координат в исполнительную систему координат блока наведения и стабилизации соединен со входом блока наведения и стабилизации.
На фиг. 1 приведена функциональная схема для одного канала предлагаемой следящей оптико-электронной системы. На фиг.2 изображена возможная реализация схемы плавного ввода ошибки (ключи - в положении для автосопровождения). Функциональная схема возможной реализации корректирующего устройства приведена на фиг.3.
Следящая оптико-электронная система состоит из последовательно соединенных оптико-электронного пеленгатора 1, преобразователя координат из измерительной системы пеленгатора в стабилизированную систему координат (ПК1) 2, схемы плавного ввода ошибки (СПВО) 3, корректирующего устройства (КУ) 4, преобразователя стабилизированных координат в исполнительную систему координат блока наведения и стабилизации (ПК2) 5, блока наведения и стабилизации (БНС) 6, выход которого кинематически связан с пеленгатором.
Все используемые составные части системы сопровождения являются известными либо могут быть получены из известных устройств путем их объединения известными методами.
Оптико-электронный пеленгатор может быть выполнен, как это описано в прототипе или [1] (оптико-электронный прибор, в частности телекамера, и телевизионный автомат в совокупности являются пеленгатором). Блок наведения и стабилизации может быть реализован как в прототипе на базе пневматических, гидравлических, электрических [4], в т.ч. на базе двух- и трехкоординатных моментных двигателей и т.п. сервоприводов. Вопросы применения и построения преобразователей координат подробно описаны в [5]. Корректирующее устройство при известных требованиях к контуру сопровождения может быть сформировано по правилам, изложенным в [6], с реализацией аппаратной части на основе методов, приведенных в [7]. Схема плавного ввода ошибки может быть реализована на базе коммутаторов, запоминающих устройств, суммирующих усилителей, и ниже будет описано, как это можно сделать.
Работа следящей оптико-электронной системы (СОЭС) осуществляется следующим образом. Данные по целеуказанию (предпочтительно на вход КУ 4, т.к. при этом обеспечивается более удобное запоминание начальных условий при переходе на автосопровождение) поступают от комплекса, в который входит СОЭС. Блок наведения и стабилизации 6 отрабатывает сигналы целеуказания в вертикальной и горизонтальной плоскостях, совмещая изображение с оптической осью визирования пеленгатора с некоторым угловым рассогласованием, но таким, что изображение объекта находится в пределах части поля зрения (строба), в которой осуществляется анализ видеосигнала. Пеленгатор 1 определяет сигнал рассогласования положения изображения объекта относительно центра строба δβ, δε, координаты которого формируются в задающем устройстве телевизионного автомата (см. [1] ). При наличии изображения объекта в стробируемом участке поля зрения пеленгатором формируется признак "готовность", после чего контур телевизионного автомата пеленгатора отрабатывает измеренное рассогласование, совмещая центр строба с изображением объекта. При таком центрировании строба относительно изображения на выходе решающего устройства телевизионного автомата сигнал рассогласования обнуляется (после чего запоминается образ эталона), а на выходе телевизионного автомата образуются электрические сигналы β, ε, пропорциональные положению центра строба относительно оптической оси телекамеры, и признак перехода на автосопровождение (АС). Признаки готовности и автосопровождения используются для управления СПВО 3.
В прототипе в автоматическом режиме указанные сигналы поступают непосредственно на вход блока наведения и стабилизации 6, что приводит к недопустимым переходным процессам и весьма вероятному срыву автосопровождения, в том числе и из-за того, что не обеспечивается стабилизация положения линии визирования. Поэтому координаты из пеленгатора 1 первоначально поступают в преобразователь координат из измерительной системы пеленгатора в стабилизированную систему координат 2. Его работа может быть, в частности, описана системой уравнений
где εc, βc - сигналы рассогласования в стабилизированной системе координат;
γ - угол скрутки измерительной системы координат (см. [5] с.138).
В результате преобразования координат в стабилизированную систему удается учесть качки носителя. Здесь следует отметить, что для работы преобразователей координат необходимо измерение качек носителя, но поскольку это очевидно, соответствующие блоки и их связи с преобразователями специально не рассматриваются. Однако учет качек, хотя и позволяет уменьшить рассогласование между линией визирования и оптической осью, не позволяет исключить все возможные причины их начального рассогласования. А как уже указывалось, такое рассогласование приводит к переходному режиму, в процессе которого возможен срыв автосопровождения.
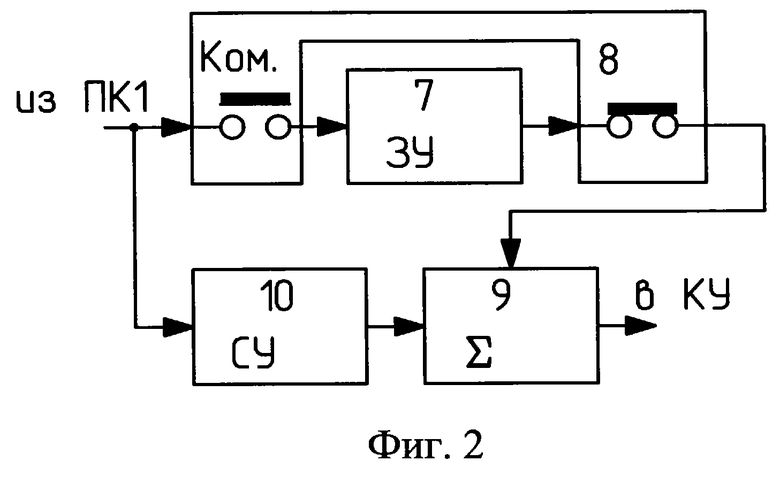
Таким образом, чтобы избежать срыва, следует уменьшить скорость перемещения изображения относительно фотоприемника в переходном режиме. Эту задачу выполняет схема плавного ввода ошибки 3. Она выполняет следующие операции. В период центрирования строба (с момента получения признака готовности к АС) входы сглаживающего 10 и запоминающего устройства 7 (см. фиг.2) подключены к выходу ПК1. На выходе запоминающего устройства 7 формируется сигнал, пропорциональный положению центра строба относительно оптической оси пеленгатора 1 в стабилизированной системе координат, поступающий на вход сумматора 9. В связи с тем что запоминающее устройство обладает некоторой инерционностью, на другой вход сумматора 9 через сглаживающее устройство 10 поступает эквивалентный сигнал с выхода ПК1, имеющий противоположный знак по отношению к выходному сигналу запоминающего устройства 7. Следовательно, при центрировании строба выходной сигнал сумматора 9 равен нулю и блок наведения и стабилизации 6 перемещает оптическую ось пеленгатора 1 со скоростью, запомненной в начале автозахвата. После окончания центрирования (получен признак АС либо прошло назначенное для центрирования время) коммутатор 8 отключает вход запоминающего устройства 7 от ПК1 (т.е. коммутатор срабатывает не в момент автозахвата, а лишь после завершения центрирования и запоминания эталона) и переводит запоминающее устройство 7 в режим медленного сброса выходного сигнала до нуля (такая функция возможна при использовании в качестве ЗУ, например, устройства выборки-хранения с соответствующей скоростью разряда в режиме хранения либо реверсивного счетчика). При этом на выходе сумматора 9 соответственно происходит плавное нарастание сигнала до величины, равной выходному сигналу телевизионного автомата. В результате обеспечивается возможность перехода в автоматический режим работы практически при любом начальном рассогласовании изображения цели относительно центра растра (в пределах поля зрения), в том числе при наличии алгоритма центрирования относительно строба.
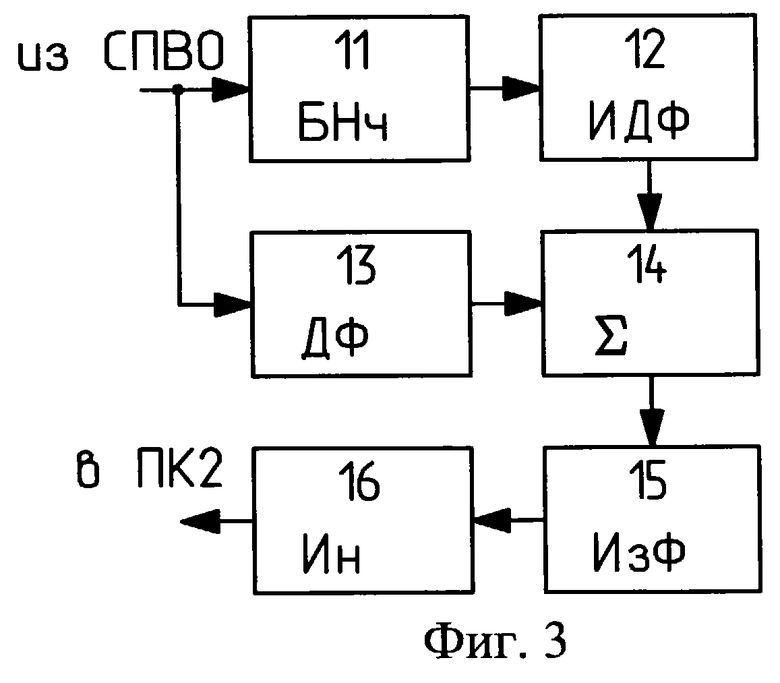
Как правило, высокая точность сопровождения оптико-электронной автоматической системой обеспечивается только в центральной части (10-15%) поля зрения. При большом отклонении изображения цели от центра растра на точность определения координат начинают существенно влиять нелинейные искажения оптической системы, нелинейность характеристик чувствительного элемента телевизионной камеры, нелинейность растра. Следовательно, для уменьшения среднеквадратического отклонения ошибки определения координат объекта целесообразно, чтобы изображение максимально возможное время удерживалось в центральной части растра, т.е. чтобы скорость совмещения изображения объекта с центром растра была максимальной. Но по указанным выше причинам при быстром перемещении изображения объекта относительно фотоприемника возникает смазывание изображения, проявляющееся в потере контраста изображения и его размывании. (Для видикона ЛИ-479, например, максимальная скорость перемещения изображения точечного объекта не должна превышать 2 мм/с). То есть скорость совмещения изображения объекта с центром растра должна выбираться из условия несрыва автосопровождения при наличии эффекта смазывания. С другой стороны, даже если сопровождение происходит без срыва, но вследствие высокой добротности в контуре скорость изменения положения линии визирования относительно центра растра велика, точное определение координат объекта невозможно, т.к. из-за смазывания его образ отличается от эталонного и пеленгатор определяет не координату объекта, а координату изображения, наиболее похожего на первоначально записанное эталонное изображение объекта. Следовательно, при сопровождении изображения объекта в центральной части растра необходимо обеспечить, чтобы перемещения линии визирования относительно центра растра не сопровождались искажениями образа из-за смазывания. Выполнение обоих этих условий обеспечивает корректирующее устройство 4. На его вход с выхода схемы плавного ввода ошибки 3 поступает сигнал и проходит сначала по двум параллельным ветвям. В одной из ветвей установлен дифференцирующий фильтр (ДФ) 13, например, с передаточной функцией
причем Т1 > Т2.
В другой ветви стоят последовательно установленные блок 11 с зоной нечувствительности (БНч) 11 и интегродифференцирующий фильтр (ИДФ) 12, например, с передаточной функцией
причем Т3 < Т1.
Выходы дифференцирующего 13 и интегро-дифференцирующего фильтров 12 подключены соответственно к первому и второму входу сумматора 14. Таким образом, если сопровождение объекта происходит при рассогласовании от центра растра, превышающем зону нечувствительности, эквивалентная передаточная функция от входа КУ 4 до выхода его сумматора 14 принимает вид
в противном случае WНКБ=WДФ, т.е. обеспечивается более высокая добротность при больших рассогласованиях между линией визирования и оптической осью, чем при малых. Благодаря реализации переключения структуры с использованием зоны нечувствительности, обеспечивается изменение сигнала на выходе сумматора 14 без скачка в момент переключения.
Для уменьшения статической и скоростной составляющей ошибки контур следящей системы желательно выполнять с астатизмом. Для этого в корректирующем устройстве используются последовательно соединенные изодромный фильтр (ИзФ) 15, входом соединенный с выходом сумматора 14, и интегратор (Ин) 16, выход которого одновременно является выходом КУ 4. Использование контура с астатизмом второго порядка позволяет также упростить решение задачи движения с постоянной скоростью в течение времени, когда осуществляется автозахват, т. к. при нулевом выходном сигнале из СПВО движение будет осуществляться со скоростью, соответствующей выходному сигналу с изодромного фильтра 15 (КУ) 4, но в установившемся режиме нулевому сигналу на входе изодрома соответствует постоянная величина на выходе.
С выхода корректирующего устройства 4 сигнал поступает на вход преобразователя стабилизированных координат в исполнительную систему координат блока наведения и стабилизации (ПК2) 5. ПК2 может быть, в частности, описан зависимостями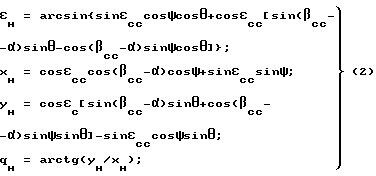
где εн qн - углы наведения БНС в исполнительной системе координат;
εcc, βcc - углы наведения БНС в стабилизированной системе координат;
α, ψ, θ - углы соответственно курса, тангажа и крена носителя.
Под действием сигнала управления с выхода ПК2 блок наведения и стабилизации 6 разворачивает оптическую ось пеленгатора в направлении на объект. Тем самым обеспечивается сопровождение движущихся и неподвижных объектов с качающегося основания.
Таким образом, повышение вероятности перехода на автосопровождение, увеличение максимальной дальности возможного перехода на автосопровождение и повышение точности сопровождения обеспечивается за счет введения в следящую оптико-электронную систему между пеленгатором и блоком наведения и стабилизации последовательно соединенных первого преобразователя координат, схемы плавного ввода ошибки, корректирующего устройства и второго преобразователя координат. Дополнительное улучшение качества достигается за счет введения задержки при отключении запоминающего устройства от выхода первого преобразователя координат, использования нелинейной коррекции и астатизма второго порядка в замкнутом контуре.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М.: Советское радио, 1979, с.232, рис.7.17 - аналог.
2. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982, с.110-112, 228-230 - аналог.
3. Грязин Г. Н. Оптико-электронные системы для обзора пространства: Системы телевидения. - Л.: Машиностроение, Ленинградское отд-е, 1988, с.8 и 9, рис.4 - прототип.
4. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981.
5. Ривкин С.С. Стабилизация измерительных устройств на качающемся основании. - М.: Наука, 1978.
6. Бесекерский В. А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1973.
7. Тетельбаум И.И., Шнейдер Ю.Р. 400 схем для АВМ. - М.: Энергия, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2001 |
|
RU2192034C1 |
Изобретение относится к области систем наблюдения и сопровождения за объектами в пространстве, преимущественно с подвижного основания. Достигаемым техническим результатом является повышение вероятности перехода на автосопровождение, увеличение максимальной дальности возможного перехода на автосопровождение и повышение точности сопровождения объектов следящей оптико-электронной системой. Следящая оптико-электронная система содержит последовательно соединенные блок наведения и стабилизации и оптико-электронный пеленгатор, последовательно соединенные преобразователь координат из измерительной системы пеленгатора в стабилизированную систему координат, схему плавного ввода ошибки, корректирующее устройство, преобразователь стабилизированных координат в исполнительную систему координат блока наведения и стабилизации. При этом вход преобразователя координат из измерительной системы пеленгатора в стабилизированную систему координат соединен с выходом оптико-электронного пеленгатора, а выход блока преобразователя стабилизированных координат в исполнительную систему координат блока наведения и стабилизации соединен со входом блока наведения и стабилизации. 3 з.п.ф-лы, 3 ил.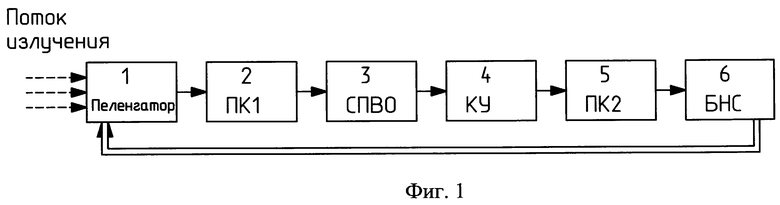
| ГРЯЗИН Г.Н | |||
| Оптико-электронные системы для обзора пространства: Системы телевидения | |||
| - Л.: Машиностроение, Ленинградское отделение, 1988, с.8, 9, рис.4 | |||
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| RU 95104732 A1, 27.01.1997 | |||
| Узел электрического соединения токоведущей шины с выводом электрического аппарата | 1981 |
|
SU1001251A1 |
| US 6147748, 02.06.1999. | |||

