Изобретение относится к автоматическому регулированию, предназначено для систем автоматического наблюдения и сопровождения за подвижными объектами в пространстве преимущественно с качающегося основания и может быть использовано для управления воздушным движением.
Известна телевизионно-оптическая система сопровождения со следящим стробом, содержащая телевизионную камеру, устройство обработки видеосигнала, решающее устройство, привод наведения [1] (Барсуков Ф.И. Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М.: Советское радио, 1979. - 256 с., стр.232, рис.7.17, аналог).
Недостатком данной телевизионной системы является недостаточная точность сопровождения целей с подвижного основания из-за отсутствия системы стабилизации оптической линии визирования и, как следствие, наличие динамической инерционности исполнительного привода и контура электронного слежения. Эта система неспособна к автоматическому захвату объекта на автосопровождение.
Известна также телевизионно-оптическая система [2] (Грязин Г.Н., Оптико-электронные системы для обзора пространства: Системы телевидения. Л., Машиностроение, Ленинградское отделение. - 1988, стр.8, 9, рис.4, аналог), содержащая последовательно соединенные телевизионный датчик, устройство усиления и обработки сигнала, вычислительное устройство (в совокупности образующее пеленгатор) и исполнительный орган. Исполнительный орган, выполняющий функции блока наведения и стабилизации, кинематически связан с оптико-электронным (телевизионным) датчиком пеленгатора.
В известной системе переход в автоматический режим осуществляется посредством предварительного разворота пеленгатора на предназначенную для сопровождения цель таким образом, чтобы она оказалась в пределах окна захвата внутри поля зрения. Однако при увеличении угловых скоростей и ускорений визирования цели вероятность перехода в автоматический режим сопровождения падает. Это объясняется, с одной стороны, падением контраста изображения цели, перемещающейся относительно растра (см. Грязин Г.Н. Оптико-электронные системы для обзора пространства: Системы телевидения. Л., Машиностроение, Ленинградское отделение. - 1988, стр.209-212). С другой стороны, если предварительный разворот пеленгатора осуществляется в полуавтоматическом режиме с участием человека-оператора, увеличиваются ошибки сопровождения высокоскоростной цели оператором в силу ограниченности его динамических характеристик, приводящих к недопустимым переходным процессам в оптико-электронной системе, вызывающим срыв автосопровождения [3] (Цибулевский И.Е. Человек как звено следящей системы. - М., Наука, 1981. - 288 с.).
Недостатком оптических систем сопровождения является их высокая чувствительность к метеоусловиям и оптическим помехам, таким как атмосферная дымка, туман, дымопылевые помехи, засветки от ярких источников света и т.д., что объясняется работой телекамеры в видимой области спектра.
Известен также радиолокатор сопровождения, содержащий передатчик, приемник, последовательно соединенные антенну, двигатель вращения облучателя, генератор опорных напряжений, блок выделения сигналов ошибки, устройство наведения и стабилизации [4] (Динамика следящих приводов. / Под ред. Л.В.Рабиновича. - М.: Машиностроение, 1982. - 496 с., стр.132, рис.2.26); [5] Радиолокационные устройства. / Под ред. В.В.Григорина-Рябова. - М.: Советское радио. - 1970, стр.570, рис.21.12, аналог).
Недостатком радиолокатора является чувствительность к средствам радиоэлектронного излучения и затруднительность работы при малых углах места из-за близости подстилающей поверхности.
Наиболее близкой по технической сущности к изобретению является свободная от основных недостатков телевизионной и радиолокационной систем известная интегрированная локационно-оптическая автоматическая система сопровождения подвижных объектов с заданной точностью, преимущественно с подвижного основания, которая состоит из последовательно соединенных оптико-электронного пеленгатора, блока управления оптико-электронной системы, последовательно соединенных устройства автоматического сопровождения, цифровой приборной системы, содержащей последовательно соединенные преобразователь «код-напряжение», второй коммутатор, интегрирующий привод и механическую передачу, второй выход которой подключен ко второму входу преобразователя «код-напряжение» и устройства наведения и стабилизации, включающего последовательно соединенные преобразователь стабилизированных координат в нестабилизированные, приборную следящую систему преобразователя координат и привод наведения и стабилизации, а также блок коррекции сигнала задающей скорости приборной следящей системы преобразователя координат, вход которого соединен со вторым выходом приборной следящей системы преобразователя координат, а выход - со вторым входом привода наведения и стабилизации, контура подслеживания выходного сигнала устройства автоматического сопровождения за выходом устройства наведения и стабилизации, содержащего последовательно соединенные первый блок сравнения, блок формирования траектории подслеживания, первый коммутатор и второй блок сравнения, и дополнительный преобразователь нестабилизированных координат в стабилизированные. Локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом устройства наведения и стабилизации, а их вторые выходы подключены соответственно к первому и второму входам формирователя логики режимов, первый и второй выходы которого подключены соответственно к управляющим входам первого и второго коммутаторов. При этом второй выход локационного пеленгатора соединен со вторым входом второго блока сравнения, выход которого соединен со входом устройства автоматического сопровождения, а выход устройства автоматического сопровождения одновременно соединен с первым входом первого блока сравнения, второй выход устройства наведения и стабилизации соединен со входом дополнительного преобразователя нестабилизированных координат в стабилизированные, выход которого соединен со вторым входом первого блока сравнения, а выход блока управления оптико-электронной системы соединен со вторым входом второго коммутатора.
Устройство автоматического сопровождения содержит последовательно соединенные первый интегратор, блок сравнения, второй интегратор, а также усиливающий элемент, входом соединенный с входом первого интегратора, а выходом - со вторым входом блока сравнения, причем входом устройства автоматического сопровождения является вход первого интегратора, а выходом - выход второго интегратора [6] (патент РФ, №2321020, МПК 7 G01S 13/66, G01S 17/66 - прототип).
В известной локационно-оптической автоматической системе сопровождения обеспечивается переключение пеленгаторов в процессе сопровождения подвижных объектов без потери точности сопровождения, а также плавное без скачков и колебаний движение пеленгаторов, что обеспечивает исключение явления «размытия» изображения на видеоконтрольном устройстве и срыв автосопровождения телевизионным пеленгатором.
Указанные известные системы наведения (аналог, прототип) предназначены для сопровождения цели. При использовании следящей системы для сопровождения цели при стрельбе по цели пушечным вооружением возможны срывы автосопровождения в связи с возможным переходом пеленгаторов на сопровождение иного объекта из находящихся в поле зрения пеленгаторов. Срыв автосопровождения связан с ухудшающейся помехозащищенностью пеленгаторов при стрельбе пушечным вооружением (дымопылевые помехи и яркая плазма при вспышке от выстрела, значительно превышающая по фону параметры цели). Известные системы сопровождения при их реализации в соответствии с аналогом и прототипом также не обеспечивают точное попадание снарядов в маневрирующую цель и выполнение огневой задачи поражения цели.
Задачей предлагаемого изобретения является повышение точности и устойчивости сопровождения цели, помехозащищенности следящей системы сопровождения, точности стрельбы по сопровождаемой маневрирующей цели при выполнении огневых задач поражения цели пушечным вооружением.
Решение указанной задачи достигается за счет того, что в следящую систему сопровождения подвижных объектов, содержащую механически соединенные локационный и оптико-электронный пеленгаторы, первые выходы которых подключены соответственно к первому и второму входам формирователя логики режимов, обеспечивающего переход сопровождения подвижных объектов с локационного режима в оптический и обратно, блок управления оптико-электронной системы, вход которого подключен ко второму выходу оптико-электронного пеленгатора, устройство автоматического сопровождения подвижных объектов, первый преобразователь нестабилизированных координат в стабилизированные и первое устройство наведения и стабилизации, содержащее последовательно соединенные первый преобразователь стабилизированных координат в нестабилизированные и первый привод наведения и стабилизации, причем выходной вал, являющийся первым выходом первого привода наведения и стабилизации, кинематически связан с локационным и оптико-электронным пеленгаторами, дополнительно введены первый сумматор, сглаживающий фильтр, механически связанные с пеленгаторами гироскопический датчик угла, вход которого подключен к выходу блока управления оптико-электронной системы, и измеритель угловой скорости, причем выходы гироскопического датчика угла и измерителя угловой скорости подключены соответственно к первому и второму входам первого сумматора, выход которого подключен ко второму входу первого первого наведения и стабилизации, первый и второй радиочастотные блоки, представляющие радиолокаторы, работающие в режиме непрерывного излучения и приема, последовательно соединенное устройство обработки сигнала, предназначенное для формирования по доплеровскому сигналу данных для вычисления начальной скорости снаряда, вычислительный блок, предназначенный для вычисления начальной скорости снаряда, ее отклонения от табличного значения, расчета поправки на изменение баллистических условий стрельбы и сигнала упреждения, и второе устройство наведения и стабилизации, содержащее последовательно соединенные второй преобразователь стабилизированных координат в нестабилизированные и второй привод наведения и стабилизации, выходной вал которого кинематически связан с башенной установкой, на которой установлена платформа с оптико-электронным и локационным пеленгаторами, при этом первый и второй радиочастотные блоки размещены на стволах орудий башенной установки, второй выход локационного пеленгатора подключен к входу сглаживающего фильтра, выход которого соединен с входом первого преобразователя нестабилизированных координат в стабилизированные, выходом соединенного с устройством автоматического сопровождения подвижных объектов, выход которого соединен с входом первого преобразователя стабилизированных координат в нестабилизированные, выходы первого и второго радиочастотных блоков подключены соответственно к первому и второму входам устройства обработки сигнала, третий вход которого соединен с первым выходом формирователя логики режимов, второй выход которого соединен с третьим входом первого привода наведения и стабилизации, второй и третий входы вычислительного блока подключены соответственно к второму выходу первого привода наведения и стабилизации и третьему выходу локационного пеленгатора.
Радиочастотный блок содержит последовательно соединенные генератор высокой частоты, фазовый модулятор, усилитель мощности и передающую антенну, последовательно соединенные приемную антенну, преобразователь высокой частоты, преобразователь низкой частоты и фильтр доплеровской частоты, а также генератор модулирующей частоты, причем второй выход генератора высокой частоты соединен со вторым входом преобразователя высокой частоты, а выход генератора модулирующей частоты одновременно подключен ко вторым входам фазового модулятора и преобразователя низкой частоты, при этом входом радиочастотного блока является приемная антенна, а первым и вторым выходами - передающая антенна и выход фильтра доплеровской частоты
Вычислительный блок содержит последовательно соединенные вычислитель поправки, второй сумматор и второй преобразователь нестабилизированных координат в стабилизированные, а также блок выработки сигнала упреждения, первый вход и выход которого подключены соответственно ко второму и третьему входам второго сумматора, при этом первым, вторым и третьими входами вычислительного блока являются соответственно вход вычислителя поправки, второй вход второго сумматора и второй вход блока выработки сигнала упреждения, а выходом - выход второго преобразователя нестабилизированных координат в стабилизированные.
Первый привод наведения и стабилизации содержит последовательно соединенные блок коррекции, коммутатор, управляемый привод и механическую передачу, второй выход которой подключен к второму входу блока коррекции, при этом первым, вторым и третьим входами первого привода наведения и стабилизации являются соответственно первый вход блока коррекции, второй и управляющий входы коммутатора, а первым и вторым выходами - выходной вал и выход механической передачи.
Параметры передаточных функций сглаживающего фильтра определяются спектральным составом шума и полезного сигнала локационного пеленгатора, а для устройства автоматического сопровождения - требуемыми характеристиками точности работы системы управления локационного пеленгатора.
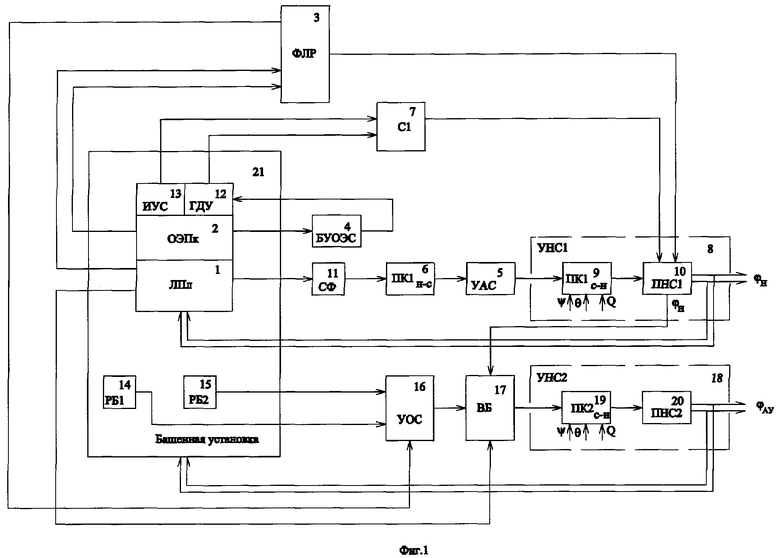
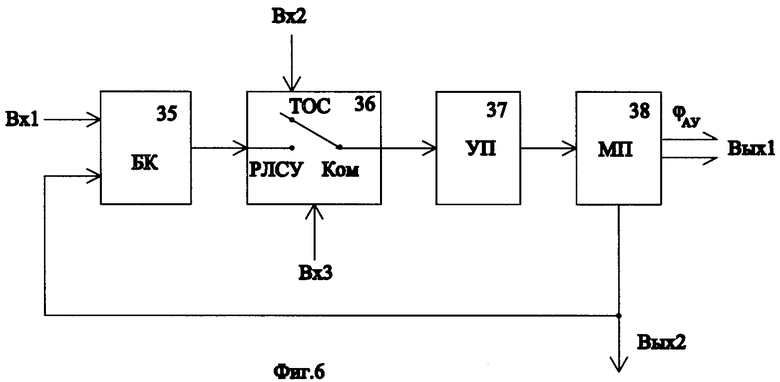
В качестве иллюстрации на чертежах приведены: фиг.1 - функциональная схема предлагаемой следящей системы сопровождения для одного канала управления, фиг.2 - схема размещения блоков на изделии, фиг.3 - векторный треугольник встречи, фиг.4 - функциональная схема радиочастотного блока, фиг.5 - функциональная схема вычислительного блока, фиг.6 - функциональная схема первого привода наведения и стабилизации.
Следящая система сопровождения состоит из локационного 1 (ЛПл) и оптико-электронного 2 (ОЭПл) пеленгаторов, формирователя логики режимов 3 (ФЛР), блока управления оптико-электронной системы 4 (БУОЭС), последовательно соединенных устройства автоматического сопровождения подвижных объектов 5 (УАС) и первого преобразователя координат из нестабилизированной системы координат в стабилизированную 6 (ПК1Н-C), первого сумматора 7 (С1), первого устройства наведения и стабилизации 8 (УНС1), содержащего последовательно соединенные первый преобразователь координат из стабилизированной системы координат в нестабилизированную 9 (ПК1С-H) и первый привод наведения и стабилизации 10 (ПНС1), сглаживающего фильтра 11 (СФ), гироскопического датчика угла 12 (ГДУ), измерителя угловой скорости 13 (ИУС), первого 14 (РБ1) и второго 15 (РБ2) радиочастотных блоков, последовательно соединенных устройства обработки сигнала 16 (УОС), вычислительного блока 17 (ВБ) и второго устройства наведения и стабилизации 18 (УНС2), содержащего последовательно соединенные второй преобразователь стабилизированных координат в нестабилизированные 19 (ПК2С-Н) и второй привод наведения и стабилизации 20 (ПНС2), установленный на башенной установке 21 (БУ).
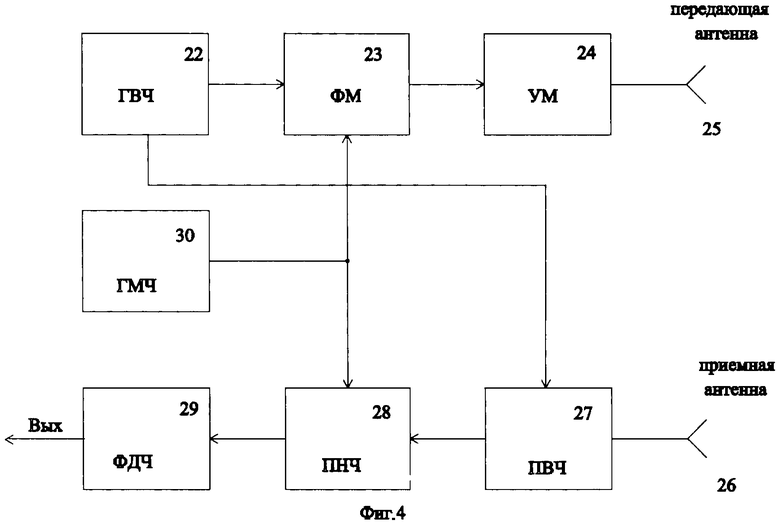
Радиочастотный блок содержит последовательно соединенные генератор высокой частоты 22 (ГВЧ), фазовый модулятор 23 (ФМ), усилитель мощности 24 (УМ) и передающую антенну 25, последовательно соединенные приемную антенну 26, преобразователь высокой частоты 27 (ПВЧ), преобразователь низкой частоты 28 (ПНЧ), фильтр доплеровской частоты 29 (ФДЧ), а также генератор модулирующей частоты 30 (ГМЧ).
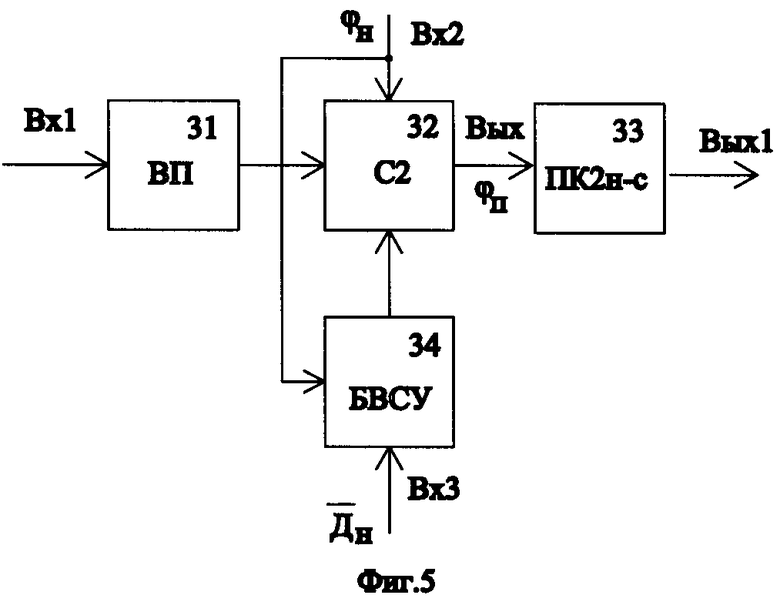
Вычислительный блок содержит последовательно соединенные вычислитель поправки 31 (ВП), второй сумматор 32 (С2) и второй преобразователь нестабилизированных координат в стабилизированные 33 (ПК2Н-C), а также блок выработки сигнала упреждения 34 (БВСУ).
Первый привод наведения и стабилизации содержит блок коррекции 35 (БК), коммутатор 36 (Ком), управляемый привод 37 (УП) и механическую передачу 38 (МП), второй привод наведения и стабилизации имеет функциональный состав, аналогичный первому приводу наведения и стабилизации.
Все используемые составные части комбинированной системы сопровождения являются известными или могут быть получены из известных устройств путем их объединения известными методами.
Оптико-электронный пеленгатор может быть выполнен, как это описано в [1], (Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М., Советское радио, 1979). Локационный пеленгатор может быть взят аналогичным [7] (Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М., Радио и связь, 1982, стр.219, рис.6.1), можно также использовать и лазерную локационную установку. Устройство автоматического сопровождения может быть реализовано, как в прототипе [6] (Патент РФ, №2321020). Коммутатор может быть реализован на герконах, реле, электронных ключах и т.п. Блоки сравнения, сглаживающий фильтр, а также сумматоры могут быть реализованы на операционных усилителях [8] (Тетельбаум И.И., Шнейдер Ю.Р. 400 схем для ABM. - М., Энергия, 1978) или цифровых микросхемах. Формирователь логики режимов может быть изготовлен на базе логических микросхем [9] (Павлов В.В. Управляющие устройства логического типа. - М., Энергия, 1968). Преобразователи координат из стабилизированной системы координат в нестабилизированную и из нестабилизированной системы координат в стабилизированную могут быть сделаны, как это описано в [10] (Ривкин С.С. Стабилизация измерительных устройств на качающемся основании. - М., Наука, 1978). Устройство наведения и стабилизации может быть реализовано, как в прототипе, на базе гидравлических, электрических двигателей и сервоприводов, как описано в [11] (Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М., Энергоиздат, 1981). При необходимости работы при больших углах возвышения или существенных значениях амплитуды качек, когда система может потерять устойчивость в результате возникновения положительных перекрестных связей из-за несовпадения измерительной и исполнительной систем координат, УНС дополняется преобразователем координат. Например, УНС может представлять собой последовательно соединенные преобразователь координат из стабилизированной системы координат пеленгатора в нестабилизированную систему координат сервопривода и сам привод наведения и стабилизации совместно с механической передачей. Выходной вал привода наведения и стабилизации ПНС при этом является выходным валом устройства наведения и стабилизации. Блок коррекции БК и устройство автоматического сопровождения при известных требованиях к приводу наведения и стабилизации и системе сопровождения могут быть сформированы по правилам, изложенным в [12] (Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М., Наука, 1973) с реализацией аппаратной части на основе методов, приведенных в [8] (Тетельбаум И.И., Шнейдер Ю.Р. 400 схем для ABM. - М., Энергия, 1978). Блок коррекции выполнен в виде ПИД-регулятора и реализован в соответствии с рекомендациями, приведенными в [12], синтез параметров ПИД-регулятора и примеры реализации и моделирования регулятора в составе динамической системы приведены в [13, 14] (Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. - СПб: КОРОНА принт, 2001. - 320 с., Ануфриев И.Е. Самоучитель MatLad 5.3/6.х - СПб.: БХВ-Петербург, 2003. - 736 с.: ил.). Гироскопический датчик угла (корректируемый позиционный гироскоп) может быть реализован, как это изложено в [15] (Магнус К. Гироскоп. Теория и применение. - М., Мир, 1982. - стр.401-407). Работа и аппаратная реализация элементов радиочастотного блока - генератора высокой частоты, фазового модулятора, усилителя мощности, передающей и приемной антенн, преобразователя высокой частоты, преобразователя низкой частоты, фильтра доплеровской частоты, а также генератора модулирующей частоты - подробно описаны в [16-18] Справочник по радиолокации: Пер. с англ. В 4-х т. / Ред. М.Сколник; Под общ. Ред. К.Н.Трофимова. - М., Советское радио, 1976 (т.2, 3), Теоретические основы радиолокации / под ред. Я.Д.Ширлина. - М, Советское радио, 1970. - 580 с., Современная радиолокация. Анализ, расчет и проектирование: Пер. с англ - М., Советское радио, 1969. - 704 с. Состав, устройство и характеристики вычислительного блока ВБ, реализованного на базе ЭВМ «Багет», и рекомендации по применению приведены в [19] (Семейство ЭВМ для специализированных применений. Семейство ЭВМ «Багет». Процессорные модули. Дополнительные модули. Периферийные устройства. - М., КБ Корунд - М, 2000. - 50 с.), а аналитические выражения для расчета поправок для обеспечения встречи визируемого и выводимого неуправляемого собственного объекта, программно-реализованные в цифровом микроконтроллере, получены на основе законов движения твердого тела в инерциальном пространстве и приведены в описании работы системы сопровождения. Характеристики микроконтроллера, рекомендации по применению и программированию микроконтроллера приведены в [20] (Руководство пользователя по сигнальным микропроцессорам семейства ADSP 2100 / Пер. с англ. О.В.Луневой; под ред. А.Д.Викторова, С-Пб. Гос. ун-т. - С-Пб, 1997. - 520 с.).
Работа системы осуществляется следующим образом. Пеленгаторы 1, 2 ведут слежение за целью одновременно и выдают сигналы, пропорциональные угловому отклонению сопровождаемой цели от линии визирования (оптической оси или оси антенны радиолокатора), независимо один от другого. Устойчивость сопровождения цели и возможность восстановления сопровождения в автоматическом режиме в случае перерыва оптической связи или потери цели локационным пеленгатором обеспечивается построением следящей системы сопровождения. Следящая система сопровождения подвижных объектов включает в себя локационный и оптико-электронный пеленгаторы, механически соединенные между собой и имеющие кинематическую связь с выходным валом устройства наведения и стабилизации. Пеленгаторы также последовательно соединены с формирователем логики режимов 3, подключенным первым и вторым выходами соответственно к третьему входу (УОС) 16 и управляющему входу коммутатора (Ком) 36. Возможность перехода сопровождения с локационного режима в оптический и обратно обеспечивается переключением структур с помощью контактов коммутатора 36. Формирователь логики режимов 3 анализирует наличие признака автосопровождения в обоих каналах и выдает сигнал управления на коммутатор 36, который подключает при работе в локационном режиме сигнал пеленгатора через сглаживающий фильтр 11, преобразователь координат 6 и устройство автоматического сопровождения подвижных объектов 5 к первому входу первого устройства наведения и стабилизации 8, а при работе в оптическом режиме сигнал пеленгатора 2 через последовательно соединенные БУ ОЭС 4, ГДУ 12, первый сумматор 7 на второй вход первого УНС 8 и (УОС) 16, обеспечивая обмен данными между УОС 16 и ВБ 17 для расчета попраки на изменение баллистических условий стрельбы. Коммутатор 36 может находиться в двух состояниях - включенном или выключенном. Включен - режим управления первого УНС1 8 от ЛПл 1, отключен - режим управления УНС1 8 от ОЭПл 2.
Локационный режим сопровождения объектов обеспечивается структурой контура, включающего приемник, передатчик, антенный переключатель, синхронизатор системы сопровождения по дальности и угловым координатам и устройство наведения и стабилизации. Приемник, передатчик, антенный переключатель, синхронизатор системы сопровождения по угловым координатам в совокупности представляют собой локационный пеленгатор. Локационный пеленгатор определяет положение объекта относительно оси диаграммы направленности антенны. Сигналы о положении объекта после звена коррекции подаются на вход устройства наведения и стабилизации, и оно осуществляет разворот локационного пеленгатора до тех пор, пока цель не окажется на оси диаграммы направленности. УНС позволяет также компенсировать качки носителя.
Поступающие на вход первого УНС1 8 стабилизированные координаты визируемой цели для управления первым приводом наведения и стабилизации (ПНС1) 10 преобразуются в нестабилизированные в преобразователе координат ПК1С-H 9. Он может быть реализован, например, с использованием зависимостей предложенных в [10]:
где εH, qH - углы наведения УНС в нестабилизированной системе координат;
εС, βC - углы наведения УНС в стабилизированной системе координат;
Q, ψ, θ - углы курса, тангажа и крена носителя соответственно.
Следует отметить, углы качек носителя используются также в ПК1Н-С 6 из нестабилизированной системы координат в стабилизированную для расчета угла скрутки γ наряду со стабилизированными координатами. Поскольку использование этой информации очевидно и она может быть получена от внешней системы или выработана самой системой сопровождения, подробно эти связи не описываются.
Оптический режим сопровождения системы обеспечивается структурой, содержащей последовательно соединенные телевизионный датчик, устройство усиления и обработки сигнала, вычислительное устройство в совокупности образующее ОЭПл, устройство коррекции и УНС1. Исполнительный орган 8 общий для ЛПл и ОЭПл. С учетом того, что управляющие сигналы содержат информацию о качках носителя, УНС1 выполняет функции устройства наведения и стабилизации и кинематически связан с оптико-электронным датчиком пеленгатора.
Сопровождение подвижной цели происходит следующим образом. После того как по сигналу целеуказания от внешней системы блок пеленгаторов развернут в направлении цели с точностью, достаточной для взятия ее на сопровождение, локационный и оптико-электронный пеленгаторы осуществляют захват цели и начинают вырабатывать условные координаты цели относительно оптической оси или оси антенны радиолокатора. Для того чтобы исключить из сигнала составляющую от качки и уменьшить перекрестные связи между каналами, сигнал с выхода пеленгатора (локационного, оптико-электронного) пересчитывают в стабилизированную систему координат, например, по зависимостям (2)

δε, δβ - сигналы рассогласования в нестабилизированной системе координат;
δεс, δβc - сигналы рассогласования в стабилизированной системе координат;
γ - угол скрутки нестабилизированной системы координат ([10], стр.138).
Полученный в пеленгаторе (локационном, оптико-электронном) сигнал поступает на вход корректирующего устройства, где проводятся такие операции над ним, чтобы, обеспечивая устойчивость системы, добиться требуемых параметров по точности и характеристикам переходных процессов [12].
Высокая точность сопровождения подвижной цели решает задачу устойчивости сопровождения следящей системой сопровождения высокодинамичной подвижной цели. Качество наведения и сопровождения подвижных целей (время регулирования, перерегулирование) и повышенная динамическая точность в радиолокационной системе обеспечиваются за счет применения сглаживающего фильтра СФ (11) и устройства автоматического сопровождения подвижных объектов УАС (5), функциональная схема и частотные характеристики которого показаны в прототипе [6]. УАС 5 имеет в своем составе два интегратора и создает в контуре радиолокационного сопровождения астатизм второго порядка по управлению. Введение астатизма второго порядка в контур сопровождения локационной системы обеспечивает требуемые точностные характеристики контура сопровождения. Для обеспечения стабильности характеристик интеграторов, входящих в состав УАС (5), во всех условиях эксплуатации устройство обеспечивает коррекцию и преобразование сигнала управления в цифровом виде. Поскольку сигнал с локационного пеленгатора зашумлен и имеет малую величину, полученную величину сигнала с локационного пеленгатора подвергают фильтрации. Вид фильтра определяется спектральным составом полезного сигнала и шума. Для медленно меняющихся полезных сигналов могут использоваться, например, фильтры низких частот либо устройства, вычисляющие среднее значение функции на определенном временном интервале.
Поскольку диаграмма направленности луча (1-2 град) локационного пеленгатора (1) существенно больше величины следящего строба (1-5 мрад) оптико-электронного пеленгатора (2) и, как правило, превышает по величине погрешность целеуказания, первоначально цель берется на автосопровождение локационным пеленгатором. Он выдает признак автосопровождения цели в формирователь логики режимов (3), который обеспечивает через коммутатор (36) подключение второго выхода ЛПл (1) ко входу первого УНС1 (8). Выходной вал УНС1 разворачивает пеленгаторы (или их передающие устройства) в сторону цели таким образом, чтобы цель оказалась на оси диаграммы направленности локационного пеленгатора 1.
Однако погрешность определения координат цели с помощью локационного пеленгатора существенно выше, чем с помощью оптико-электронного. Поэтому целесообразно перевести управление первым устройством наведения и стабилизации УНС1 8 на сигнал от ОЭПл (2). Когда изображение цели оказывается в стробе и сигнал от него становится отличным от фона, ОЭПл (2) выдает в ФЛР (3) информацию об этом со своего второго выхода. Формирователь логики режимов переключает с помощью коммутатора (36) УНС1 (8) в интегрирующий режим работы. Отключается БК (35) от управляемого привода 37, который через гироскопический датчик угла 12 и блок управления оптико-электронной системы 4 подключается ко второму выходу ОЭПл 2. В этом режиме выходной вал УНС1 (8) стремится развернуть пеленгаторы так, чтобы изображение цели оказалось в центре растра, соответствующем положению оптической оси ОЭПл (2). Точностные характеристики и высокая плавность работы оптической системы управления обеспечена выбором структуры оптико-электронной системы управления - введением гироскопического датчика угла (ГДУ) 12 и организацией в контуре сопровождения дополнительного астатизма по управлению за счет перевода привода наведения и стабилизации (ПНС1) 10 в интегрирующий режим работы с помощью коммутатора (Ком) 36. Введение в контур оптической системы гироскопического датчика угла 12, установленного на той же платформе, что и приемное устройство пеленгатора, позволяет измерять качки в той же системе координат, что и приемное устройство пеленгатора 2. Поскольку положение измерительных осей ГДУ 12 соответствует желаемому, а не фактическому положению платформы, сигнал на выходе ГДУ 12 представляет собой ошибку наведения и стабилизации, замеренную в нестабилизированной системе координат, и является сигналом управления для УНС1 8.
Такое построение оптической системы дает преимущество по точности стабилизации, так как измеритель качки находится непосредственно на стабилизируемом объекте. Малые ошибки стабилизации уменьшают уровень динамических воздействий и повышают плавность движения платформы (под плавностью понимается скорость изменения ошибки по углу). Дополнительное повышение точности работы системы обеспечено введением астатизма по управлению за счет перевода с помощью коммутатора (Ком) 36 следящего привода ПНС 8 в интегрирующий режим. Увеличение ошибки стабилизации за счет замыкания обратной связи привода не по абсолютной скорости качки, а по скорости двигателя, компенсируется с помощью измерителя абсолютной угловой скорости (ИУС) 12 платформы с установленными на ней пеленгаторами 1, 2.
Рекомендованное построение оптической системы управления позволяет значительно повысить точность определения координат цели (ошибка определения координат не превышает 0.05-0. мрад) и плавность наведения оптического пеленгатора 2 и в итоге уменьшить вероятность срыва сопровождения при работе системы сопровождения в режиме сопровождения наблюдаемого объекта.
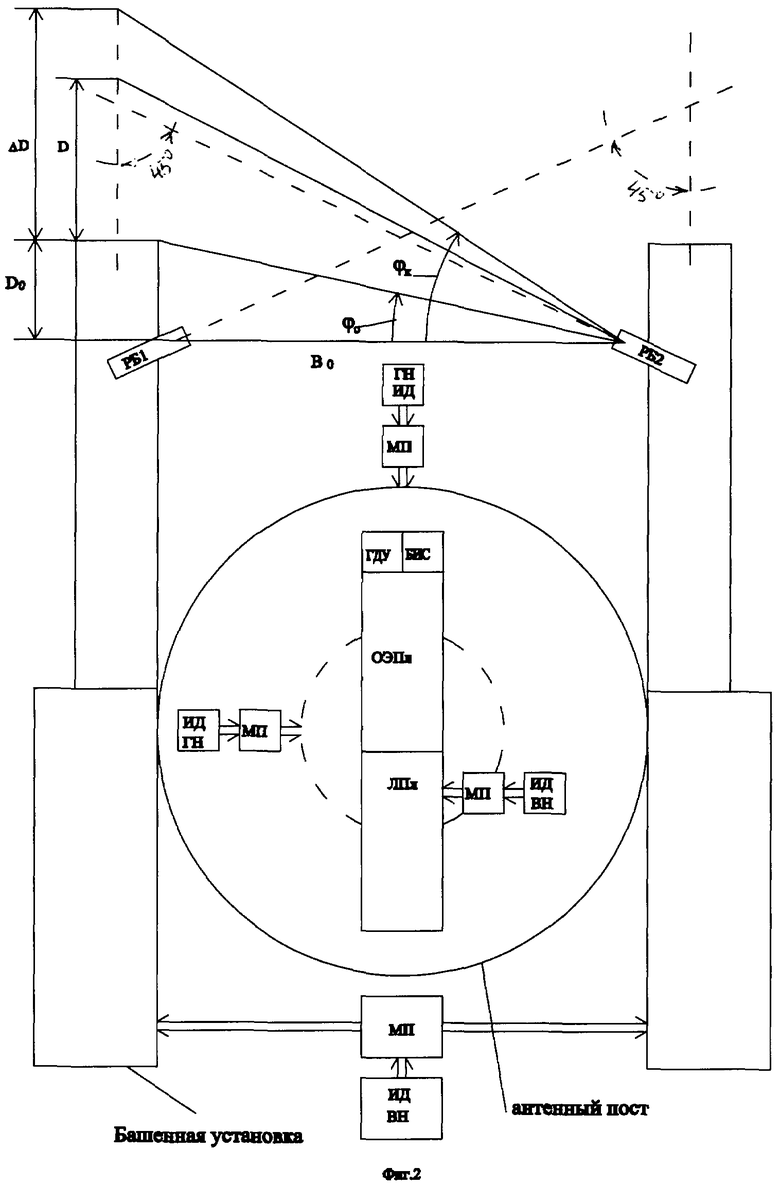
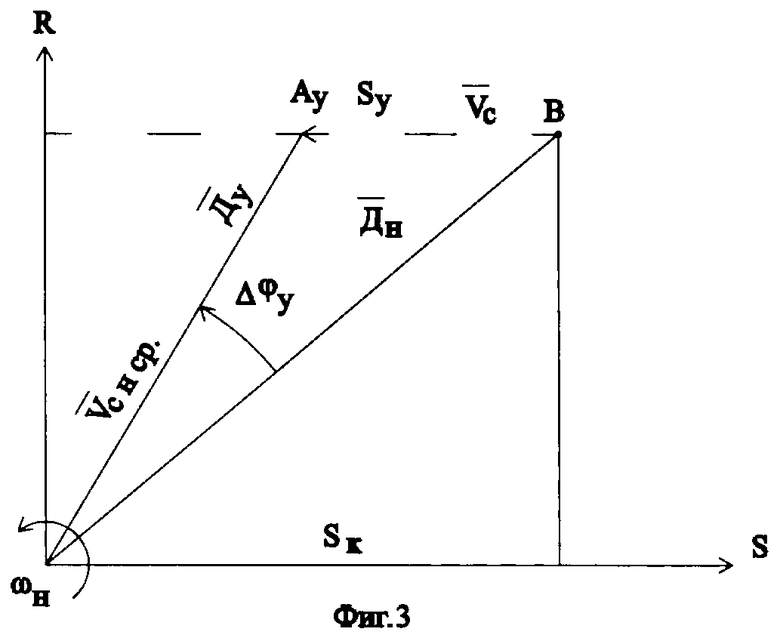
В ряде практических применений следящей системы возникает задача уничтожения сопровождаемой пеленгаторами маневрирующей цели. Для решения задачи поражения цели в состав системы введена башенная установка с двумя орудиями, которые обеспечивают выполнение огневой задачи поражения маневрирующей цели. На башенной установке установлена платформа с оптическим и локационным пеленгатором, при этом башенная установка имеет автономные привод наведения установки в горизонтальной плоскости и привод наведения орудий в вертикальной плоскости. Приводы наведения башенной установки обеспечивают также подслеживание башенной установки в горизонтальной плоскости и пушечного вооружения в плоскости вертикального наведения за положением оптической оси оптико-электронного пеленгатора или осью диаграммы направленности локационного пеленгатора. Схема размещения устройств следящей системы на изделии приведена на фиг.2. Основное назначение следящей системы - сопровождение подвижных целей. Учитывая скорости движения снаряда и скорость полета визируемой цели, приводы наведения башенной установки (ПНС2) 20 в горизонтальной плоскости и пушечного вооружения наводятся несинхронно с оптическим 2 или локационным 1 пеленгатором (на визируемую цель), а с некоторым упреждением. Векторный треугольник встречи приведен на фиг.3. Из рассмотрения векторного треугольника встречи следует простая зависимость для вычисления угла упреждения αу (3):
где Дн - измеренная дальность до цели;
ωн - измеренная угловая скорость вращения линии визирования;
Ду - дальность от башенной установки до точки встречи (дальность стрельбы);
τ - время полета снаряда на исчисленную дальность стрельбы;
αу - угол упреждения.
В (3) скорость снаряда определяется параметрами орудийных систем и характеристиками снаряда и, в простейшем варианте, берется из формуляра на партию применяемых для поражения цели снарядов. Однако использование данных формуляра в отдельных ответственных практических применениях не обеспечивает, с учетом неуправляемости полета снарядов после их выхода из канала ствола, точного попадания снаряда в сопровождаемую пеленгаторами цель. Для точной попадания снаряда в сопровождаемую цель необходимо вычислять угол упреждения с учетом конкретной начальной скорости вылета снаряда из канала ствола. Измерение начальной скорости снарядов в данном техническом решении предлагается производить радиолокационным способом с использованием эффекта Доплера путем обработки отраженного от вылетающего из канала ствола снаряда и зондирующего сигналов. Для определения скорости полета снаряда сравниваются частоты отраженного и зондирующего сигналов и выделяется сигнал с разностной частотой (частотой Доплера). Полученный сигнал после обработки в (УОС) 16 передается по каналу связи в вычислительный блок 17 для вычисления начальной скорости снаряда, ее отклонения от табличного значения, расчета поправки на отклонение баллистических условий стрельбы и сигнала упреждения.
Для обеспечения независимого измерения скорости вылета снарядов из канала ствола каждого орудия используются два радиочастотных блока, подключенные к устройству обработки сигналов (УОС) 16, которое обрабатывает поступающие с РБ1 и РБ2 сигналы, формируют данные для вычисления начальной скорости снарядов (время пролета снарядом фиксированного участка траектории) и передают их по каналу связи в ВБ 17, в котором вычисляется поправка на отклонение баллистических условий стрельбы, рассчитывается угол упреждения, являющийся сигналом управления приводов наведения башенной установки, который с выхода ВБ 17 поступает на вход второго УНС2 18, обеспечивая управление наведением приводов башенной установки. Схема размещения радиочастотных блоков РБ1, РБ2 на стволах относительно траектории полета снаряда приведена на фиг.2.
Измерение скорости снаряда производится путем подсчета периодов доплеровской частоты за время пролета снарядом фиксированного участка траектории D фиг.2 (обычно называемого измерительной базой), определения времени пролета этой длины и вычисления скорости по формуле

где D - длина фиксированной измерительной базы;
t - время пролета снарядом фиксированной измерительной базы.
Радиочастотные блоки РБ1, РБ2 14, 15 (приемопередатчик), устанавливаемые на каждом орудии башенной установки, представляют собой радиолокаторы, работающие в режиме непрерывного излучения, которые обеспечивают генерацию СВЧ-энергии, излучение ее в эфир, приема отраженного от снаряда сигнала доплеровской частоты, несущей информацию о скорости движения снаряда.
В состав приемопередатчика входят:
- блок антенн (приемная и передающая);
- блок СВЧ приемопередающий;
- блок первичной обработки сигналов;
- светоприемник-синхронизатор, предназначенный для фиксации момента выхода снаряда из канала ствола и синхронизации работы блока.
Антенны и блок СВЧ обеспечивают генерацию и излучение СВЧ-энергии частотой
FH, приема отраженного сигнала (FH+FД) преобразования его в сигнал частотой FД.
Здесь FH - несущая частота передатчика;
(FH+FД) - частота отраженного от снаряда сигнала;
FД - доплеровская частота.
Структурная схема построения радиочастотной части приведена на фиг.4. Генератор высокой частоты (ГВЧ) 22 вырабатывает сигнал

с частотой fo и амплитудой Ag. Сигнал с ГВЧ 22 модулируется в фазовом модуляторе (ФМ) 23 сигналом с генератора модуляции (ГМЧ) 30, имеющим частоту Fm. Тогда сигнал Ut, излучаемый передающей антенной At 25, можно записать как

Сигнал Ur, принимаемый приемной антенной Ar 26, который отражается от снаряда, будет иметь вид

где Ar - амплитуда,  - задержка сигнала от удаляющегося снаряда, находящегося на расстоянии Ro и движущегося с радиальной скоростью V. Сигнал на низкой частоте с преобразователя высокой частоты (ПВЧ) 27определяется как
- задержка сигнала от удаляющегося снаряда, находящегося на расстоянии Ro и движущегося с радиальной скоростью V. Сигнал на низкой частоте с преобразователя высокой частоты (ПВЧ) 27определяется как

который проходит через фильтр доплеровской частоты (ФДЧ) 29. Таким образом, сигнал с выхода ФДЧ 29 имеет частоту  . Схема расположения радиочастотной части (РБ1, РБ2) относительно траектории движения снаряда представлена на фиг.2. Исходя из минимально возможной скорости вылета снаряда Vc и максимального темпа стрельбы находится минимально возможное расстояние между снарядами на траектории по формуле
. Схема расположения радиочастотной части (РБ1, РБ2) относительно траектории движения снаряда представлена на фиг.2. Исходя из минимально возможной скорости вылета снаряда Vc и максимального темпа стрельбы находится минимально возможное расстояние между снарядами на траектории по формуле

где Vc - скорость вылета снаряда;
Т - максимальный темп стрельбы.
Для обеспечения угловой селекции снарядов ширина диаграммы направленности
θ0,5 в горизонтальной плоскости из геометрических построений (фиг.2) определится как

Начальная скорость Vc определяется из величины интервала D и времени Т, за которое снаряд проходит это расстояние

Так как доплеровский определитель обеспечивает измерение радиальной скорости V
расстояние R=Rk-Rn можно определить как
Выбирая интервал времени Т, равный целому числу N периодов доплеровского сигнала Td, т.е. T=NTd, тогда

где λ - длина волны электромагнитного излучения.
Из фиг.2 имеем

и с учетом 11, 12, 13, получаем
В итоге, чтобы определить начальную скорость Vc, необходимо:
- измерить временной интервал Т, за который укладывается N периодов доплеровской частоты;
- оценить геометрическое расстояние Rn и Do;
- знать длину волны λ.
Приемник обеспечивает фильтрацию и усиление сигнала отраженного от снаряда. С целью увеличения отношения сигнал/шум для повышения доплеровской частоты применяется узкополосная фильтрация доплеровского сигнала.
В качестве вычислительного блока (ВБ) 17 используется малогабаритная ЭВМ типа «Багет», которая содержит высокопроизводительный процессор, ОЗУ, клавиатуру, индикатор и программируемое запоминающее устройство [19]. Использование ЭВМ расширяет спектр решаемых задач. Становится возможным вычисление поправки, учет метеоусловий, а также упрощается сопряжение различных устройств системы сопровождения. В составе устройства обработки сигнала имеется Flash-память, что позволяет запоминать данные измерений для группы выстрелов, оценивать изменения начальной скорости во время работы системы сопровождения, сохранять данные при пропадании напряжения питания. Перепрограммируемое запоминающее устройство используется для ввода новых данных из таблиц при необходимости в перерывах работы следящей системы.
Таким образом, в заявленном техническом решении за счет использования башенной установки с двумя орудиями и применения специальных устройств, обеспечивающих точное попадание неуправляемого пушечного снаряда в сопровождаемую подвижную цель, при использовании высокоточных локационной и телевизионной систем управления обеспечивается:
- определение начальной скорости снаряда и вычисление поправки в систему управления;
- повышенная точность стрельбы по сопровождаемой цели с учетом собственных баллистических характеристик снарядов и условий работы следящей системы;
- повышенная точность и устойчивость сопровождения целей локационным и оптико-электронным пеленгаторами;
- повышенная помехозащищенность следящей системы сопровождения, выражающаяся в возможности сопровождения объектов пеленгаторами с исключением ложных захватов при стрельбе по цели пушечным вооружением.
Источники информации
1. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М., Советское радио, 1979. - 256 с., аналог.
2. Грязин Г.Н. Оптико-электронные системы для обзора пространства: Системы телевидения. - Л.: Машиностроение, Ленинградское отд., 1988. - 224 с.
3. Цибулевский И.Е. Человек как звено следящей системы. - М., Наука, 1981. - 288 с., аналог.
4. Динамика следящих приводов / Под ред. Л.В.Рабиновича. - М.: Машиностроение, 1982. - 496 с., стр.132, рис.2.26, аналог.
5. Радиолокационные устройства / Под ред. В.В.Григорина-Рябова. - М.: Советское радио, 1970. - 680 с., стр.570, рис21.12 аналог.
6. Пат. 2321020 РФ. Интегрированная локационно-оптическая автоматическая система сопровождения подвижных объектов / А.Г.Шипунов, И.В.Степаничев, А.В.Жуков, Е.В.Александров и др. // Бюл. - 2008. - №9 - С.845, прототип.
7. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М., Радио и связь, 1982. - 304 с.
8. Тетельбаум И.И., Шнейдер Ю.Р. 400 схем для ABM. - М., Энергия, 1978. - 246 с., ил.
9. Павлов В.В. Управляющие устройства логического типа. - М., Энергия, 1968.
10. Ривкин С.С. Стабилизация измерительных устройств на качающемся основании. - М., Наука, 1978. - 320 с.: ил.
11. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М., Энергоиздат, 1981. - 576 с.
12. Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М., Наука, 1973. - 768 с.
13. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. - СПб: КОРОНА принт, 2001. - 320 с.
14. Ануфриев И.Е. Самоучитель MatLad 5.3/6.х - СПб.: БХВ-Петербург, 2003. - 736 c.: ил.
15. Магнус К. Гироскоп. Теория и применение. - М., Мир, 1974. - 526 с.
16. Справочник по радиолокации: Пер. с англ. В 4-х т. / Ред. М.Сколник; Под общ. ред. К.Н.Трофимова. - М., Советское радио, 1976. (т.2, 3).
17. Теоретические основы радиолокации / под ред. Я.Д.Ширлина. - М., Советское радио, 1970. - 580 с.
18. Современная радиолокация. Анализ, расчет и проектирование: Пер с англ. / Под общ. ред. Ю.Б. - М., Советское радио, 1969. - 704 с.
19. Семейство ЭВМ для специализированных применений. Семейство ЭВМ «Багет». Процессорные модули. Дополнительные модули. Периферийные устройства. - М., КБ Корунд-М, 2000. - 50 с.
20. Руководство пользователя по сигнальным микропроцессорам семейства ADSP 2100 / Пер. с англ. О.В.Луневой; под ред. А.Д.Викторова, С-Пб. Гос. ун-т. - С-Пб, 1997. - 520 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
Следящая система сопровождения подвижных объектов в пространстве может быть использована для управления воздушным движением. Достигаемый технический результат изобретения заключается в повышении устойчивости сопровождения подвижного объекта и точности стрельбы по маневрирующей цели. Указанный результат достигается за счет того, что в систему сопровождения, содержащую функционально связанные между собой локационный и оптико-электронный пеленгаторы, формирователь логики режимов, сглаживающий фильтр, первый сумматор, первое устройство наведения и стабилизации, а локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом первого устройства наведения и стабилизации, введены устройство автоматического сопровождения, гироскопический датчик угла, измеритель угловой скорости пеленгаторов, два радиочастотных блока, каждый из которых установлен на трубе башенной установки, устройство обработки сигналов радиочастотных блоков, вычислительный блок, второе устройство наведения и стабилизации. Устойчивое сопровождение обеспечено выбором структур локационной и оптической систем сопровождения. Для точного поражения сопровождаемой цели по замеренной скорости вылета снарядов из канала ствола в вычислительном блоке рассчитывается угол упреждения, который суммируется с углом наведения пеленгатора и используется во втором устройстве наведения и стабилизации, которое для точного попадания снарядов в цель подслеживает за перемещениями пеленгаторов. 3 з.п. ф-лы, 6 ил.
1. Следящая система сопровождения подвижных объектов, содержащая механически соединенные локационный и оптико-электронный пеленгаторы, первые выходы которых подключены соответственно к первому и второму входам формирователя логики режимов, обеспечивающего переход сопровождения подвижных объектов с локационного режима в оптический и обратно, блок управления оптико-электронной системы, вход которого подключен ко второму выходу оптико-электронного пеленгатора, устройство автоматического сопровождения подвижных объектов, первый преобразователь нестабилизированных координат в стабилизированные и первое устройство наведения и стабилизации, содержащее последовательно соединенные первый преобразователь стабилизированных координат в нестабилизированные и первый привод наведения и стабилизации, причем выходной вал, являющийся первым выходом первого привода наведения и стабилизации, кинематически связан с локационным и оптико-электронным пеленгаторами, отличающаяся тем, что в ее состав дополнительно введены первый сумматор, сглаживающий фильтр, механически связанные с локационным и оптико-электронным пеленгаторами гироскопический датчик угла, вход которого подключен к выходу блока управления оптико-электронной системы, и измеритель угловой скорости, причем выходы гироскопического датчика угла и измерителя угловой скорости подключены соответственно к первому и второму входам первого сумматора, выход которого подключен ко второму входу первого привода наведения и стабилизации, первый и второй радиочастотные блоки, представляющие собой радиолокаторы, работающие в режиме непрерывного излучения и приема, последовательно соединенные устройство обработки сигнала, предназначенное для формирования по доплеровскому сигналу данных для вычисления начальной скорости снаряда, вычислительный блок, предназначенный для вычисления начальной скорости снаряда, ее отклонения от табличного значения и расчета поправки на изменение баллистических условий стрельбы и сигнала упреждения, и второе устройство наведения и стабилизации, содержащее последовательно соединенные второй преобразователь стабилизированных координат в нестабилизированные и второй привод наведения и стабилизации, выходной вал которого кинематически связан с башенной установкой, на которой установлена платформа с оптико-электронным и локационным пеленгаторами, при этом первый и второй радиочастотные блоки размещены на стволах орудий башенной установки, причем второй выход локационного пеленгатора подключен к входу сглаживающего фильтра, выход которого соединен с входом первого преобразователя нестабилизированных координат в стабилизированные, выходом соединенного с устройством автоматического сопровождения подвижных объектов, выход которого соединен с входом первого преобразователя стабилизированных координат в нестабилизированные, выходы первого и второго радиочастотных блоков подключены соответственно к первому и второму входам устройства обработки сигнала, третий вход которого соединен с первым выходом формирователя логики режимов, второй выход которого соединен с третьим входом первого привода наведения и стабилизации, второй и третий входы вычислительного блока подключены соответственно к второму выходу первого привода наведения и стабилизации и третьему выходу локационного пеленгатора.
2. Система по п.1, отличающаяся тем, что радиочастотный блок содержит последовательно соединенные генератор высокой частоты, фазовый модулятор, усилитель мощности и передающую антенну, последовательно соединенные приемную антенну, преобразователь высокой частоты, преобразователь низкой частоты и фильтр доплеровской частоты, а также генератор модулирующей частоты, причем второй выход генератора высокой частоты соединен со вторым входом преобразователя высокой частоты, а выход генератора модулирующей частоты одновременно соединен со вторыми входами фазового модулятора и преобразователя низкой частоты, при этом входом радиочастотного блока является приемная антенна, а первым и вторым выходами - передающая антенна и выход фильтра доплеровской частоты.
3. Система по п.1, отличающаяся тем, что вычислительный блок содержит последовательно соединенные вычислитель поправки, второй сумматор и второй преобразователь нестабилизированных координат в стабилизированные, а также блок выработки сигнала упреждения, вход и выход которого подключены соответственно к второму и третьему входам второго сумматора, при этом первым, вторым и третьими входами вычислительного блока являются соответственно вход вычислителя поправки, второй вход второго сумматора и второй вход блока выработки сигнала упреждения, а выходом - выход второго преобразователя нестабилизированных координат в стабилизированные.
4. Система по п.1, отличающаяся тем, что привод наведения и стабилизации содержит последовательно соединенные блок коррекции, коммутатор, управляемый привод и механическую передачу, второй выход которой подключен к второму входу блока коррекции, при этом первым, вторым и третьим входами привода наведения и стабилизации являются соответственно первый вход блока коррекции, второй и управляющий входы коммутатора, а первым и вторым выходами - выходной вал и второй выход механической передачи.
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА КООРДИНАТАМИ ЦЕЛИ | 2000 |
|
RU2189056C2 |
| US 2007008213 A1, 11.01.2007 | |||
| US 5638162 A, 10.06.1997 | |||
| СПОСОБ ВЫПОЛНЕНИЯ АВТОМАТИЧЕСКОГО ВВОДА В ДЕЙСТВИЕ СЕТИ | 2011 |
|
RU2589308C2 |
| Устройство для распознавания цвета | 1991 |
|
SU1836695A3 |
| БЛОК ИЗ ДВУХ АНТЕНН С ДВОЙНЫМИ РЕФЛЕКТОРАМИ, УСТАНОВЛЕННЫХ НА ОБЩЕЙ ОПОРЕ, И СПУТНИК, СОДЕРЖАЩИЙ ТАКОЙ БЛОК | 2015 |
|
RU2685090C2 |

