Изобретение относится к области навигации летательных аппаратов (ЛА) и предназначено для повышения точности определения координат при выполнении ими групповых полетов строем.
Известен способ коррекции счисленных координат, при котором периодически на каждом ЛА, находящемся в пути, измеряют параметры относительного местоположения (дальность, азимут, угол превышения) ориентира с известными координатами, при помощи геометрических соотношений рассчитывают собственные координаты, определяют поправки к счисленным координатам, как разность между составляющими счисленных координат и составляющими координат, рассчитанных по измеренным параметрам относительно местоположения ориентира с известными координатами, корректируют счисленные координаты путем вычитания из составляющих счисленных координат поправок к ним, принимают откорректированные координаты в качестве опорной точки, относительно которой производят последующее счисление до момента последующей коррекции [1]
Недостатками такого способа являются низкая точность определения поправок к счисленным координатам, а также невозможность проведения коррекции при полетах над безориентирной местностью (например, морем).
Наиболее близким к предлагаемому является способ коррекции счисленных координат, при котором на каждом ЛА, находящемся в строю, измеряют параметры относительного местоположения ориентира с известными координатами, при помощи геометрических соотношений рассчитывают собственные координаты, формируют наблюдения, как разность между составляющими счисленных координат и составляющими координат, рассчитанных по измеренным параметрам относительного местоположения ориентира с известными координатами, выполняют один шаг рекуррентной обработки наблюдений и получают оценки погрешностей счисленных составляющих координат для данного шага обработки, после выполнения L-шагов рекуррентной обработки корректируют счисленные координаты путем вычитания из составляющих счисленных координат оценок их погрешностей, полученных на последнем шаге рекуррентной обработки, принимают откорректированные координаты в качестве опорной точки, относительно которой производят следующее счисление координат до момента последующей коррекции [2]
Недостатком такого способа является невозможность проведения коррекции при выполнении полета над безориентирной местностью.
Цель изобретения обеспечение коррекции и повышение точности определения координат при полетах ЛА над безориентирной местностью.
Для достижения указанного технического результата в способе коррекции счисленных координат, при котором на каждом ЛА измеряют составляющие его собственной скорости, параметры относительного местоположения ЛА относительно ориентира, рассчитывают собственные координаты по измеренным параметрам относительного местоположения, формируют наблюдения, как разность между составляющими счисленных координат и составляющими рассчитанных координат, выполняют один шаг рекуррентной обработки наблюдений и получают оценки погрешностей счисленных составляющих координат для данного шага обработки, а затем после выполнения L-шагов рекуррентной обработки корректируют счисленные координаты путем вычитания из составляющих счисленных координат оценок их погрешностей, полученных на последнем шаге рекуррентной обработки, и принимают откорректированные координаты в качестве опорной точки, относительно которой производят следующее счисление до момента следующей коррекции, на каждом ЛА, находящемся в строю, за исключением первого, непрерывно измеряют параметры относительного местоположения ближайшего впереди летящего ЛА и поочередно начиная от ЛА, находящегося в одном конце строя, к ЛА, находящемуся в другом конце строя, а затем наоборот, последовательно в зависимости от направления передают составляющие скорости каждого впереди летящего ЛА и его составляющие уточненных координат, представляющие собой разность между составляющими счисленных координат и оценками их погрешностей ближайшим летящим позади ЛА, или измеренные параметры относительного местоположения впереди летящего ЛА и составляющие своих уточненных координат ближайшему летящему впереди ЛА, причем оценки счисленных координат ЛА, с которого начинается передача данных, в начальный момент принимают равным нулю, затем в зависимости от направления передачи сигналов на каждом летящем позади или впереди ЛА принимают от ближайшего впереди или позади летящего ЛА переданные им данные на момент приема в зависимости от направления передачи сигналов по измеренным параметрам относительно местоположения впереди летящего ЛА принятым параметрам своего относительного местоположения от позади летящего ЛА, принятым составляющим скорости впереди летящего ЛА или измеренным собственным составляющим скорости принятым составляющим уточненных координат летящего впереди или позади ЛА рассчитывают собственные координаты, рассчитывают уточненные составляющие собственных координат и оценками их погрешностей, полученных после очередного шага рекуррентной обработки, и передают в зависимости от направления передачи сигналов составляющие уточненных координат и составляющие скорости следующему ближайшему позади ЛА или составляющие уточненных координат и измеренные параметры относительного местоположения следующему ближайшему впереди летящему ЛА, причем после L-1 шагов рекуррентной обработки на первом и последнем в строю ЛА, и L шагов на всех остальных ЛА, находящихся в строю, осуществляют по мере выполнения последнего шага коррекцию счисленных координат, причем передачу данных в новом цикле формирования оценок начинают с ЛА, находящегося в противоположном конце строя, чем в предыдущем цикле.
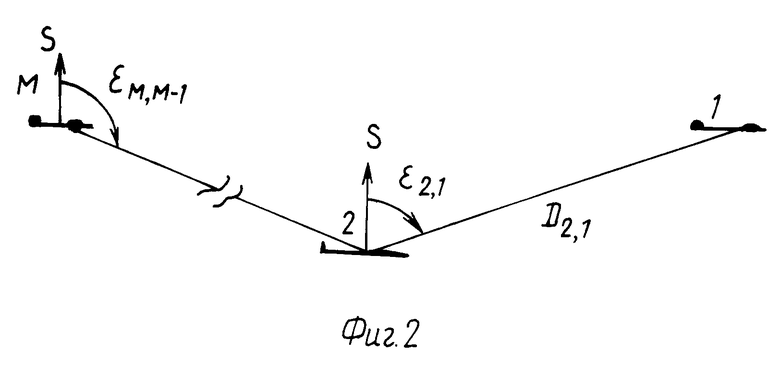
На фиг. 1 и 2 изображена прямоугольная система координат ONES, начало которой для каждого ЛА совпадает с центром масс данного ЛА, ось OS направлена по геодезической вертикали вверх, оси ON и OE лежат в плоскости горизонта, причем ON направлена на Север, а ось OE дополняет оси ON и OS до правой системы координат, а также показаны параметры относительного местоположения самолетов в строю (азимут Ai,i-1 и угол превышения εi,i-1 впереди летящего ЛА, наклонная дальность до него Di,i-1).
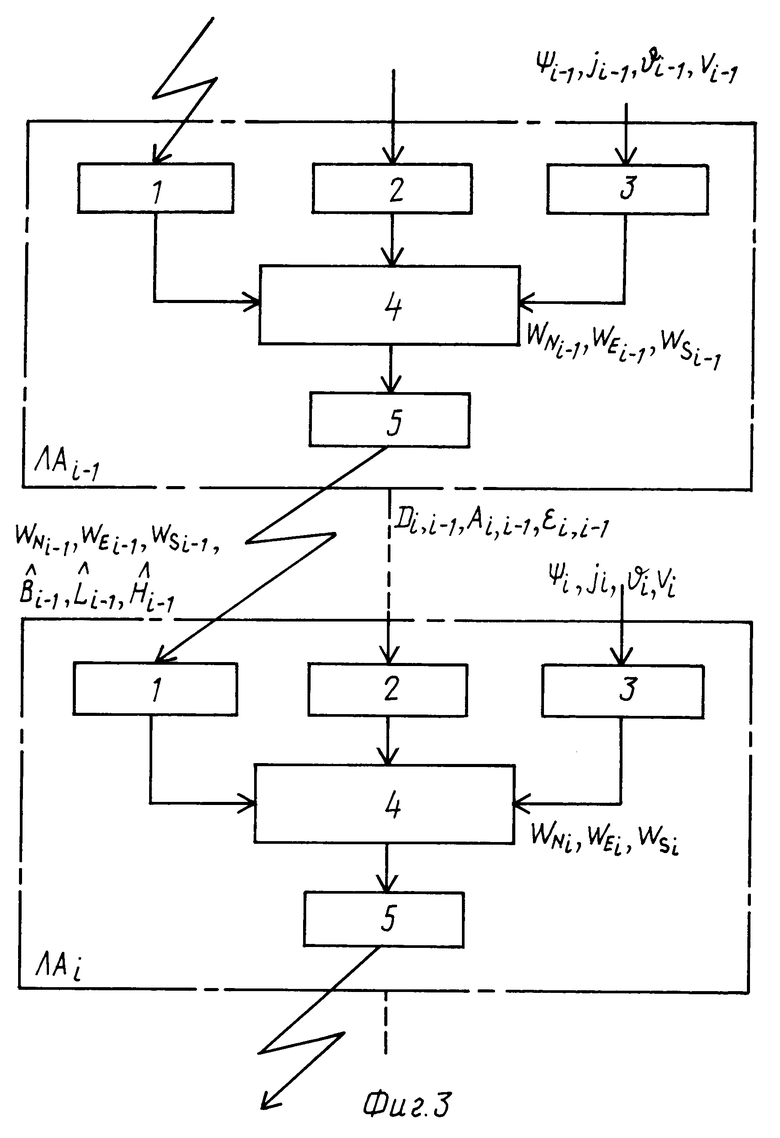
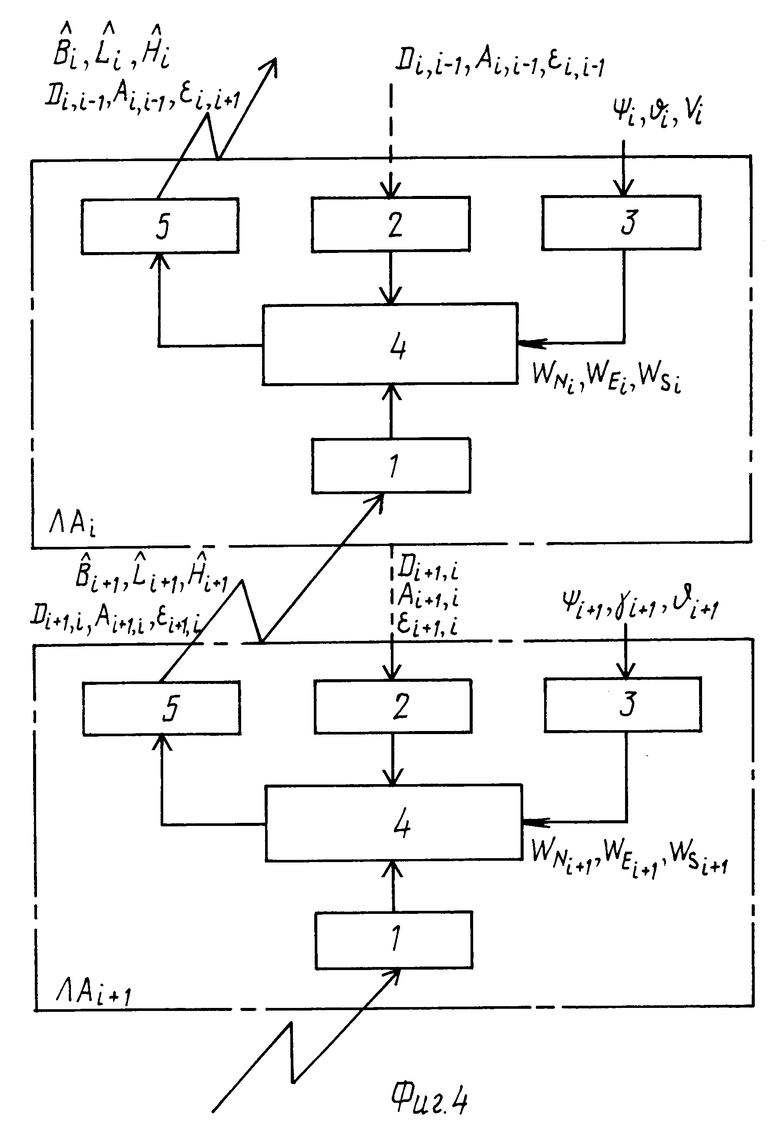
На фиг. 3 и 4 изображены функциональные схемы устройства, реализующие предложенный способ. Данное устройство (фиг.3, 4) содержит приемник 1, локатор 2, измеритель скорости и углов ориентации ЛА 3, в качестве которого может быть использована инерциальная система, вычислитель 4, передатчик 5.
Устройство устанавливается на каждом ЛА, находящемся в строю, и работает следующим образом.
С выхода измерителей 3 (фиг.3, 4) каждого ЛА на вход их вычислителей 4 поступают составляющие путевой скорости WNi, WEi, WSi в осях системы координат ONES. В вычислителях 4 осуществляют счисление геодезических координат, например, с использованием следующих выражений /3/
где B0i, L0i, H0i координаты i-го ЛА в опорной точке;
Bi, Li, Hi счисленные координаты i-го ЛА;
θi, Gi радиусы кривизны земного эллипсоида для 21-го ЛА;
a длина большой полуоси референц-эллипсоида;
e2 квадрат эксцентриситета.
На каждом ЛА, находящемся в строю, за исключением первого, измеряют параметры относительного местоположения ближайшего впереди летящего ЛА (его азимута Ai,i-1, угол превышения εi,i-1 и дальность до него Di,i-1) с использованием локатора 2.
Поочередно от ЛА, находящегося в одном конце строя, до ЛА, находящемся в другом его конце, и обратно, последовательно выполняются следующие операции.
Например, начиная от ЛА, находящегося в начале строя, передают с выхода передатчика 5 i-1-го ЛА (фиг.3) составляющие его путевой скорости WNi-1, WEi-1, WSi-1, измеренные в измерителе 3 и поступившие через вычислитель 4 на вход передатчика 5, а также составляющие уточненных геодезических координат и высоты i-1-го ЛА  ,
,  ,
,  , поступившие на вход передатчика 5 с выхода вычислителя 4 и вычисленные в последнем согласно выражения
, поступившие на вход передатчика 5 с выхода вычислителя 4 и вычисленные в последнем согласно выражения
где  вектор уточненных координат i-1-го ЛА;
вектор уточненных координат i-1-го ЛА;
Xi-1 [Bi-1, Li-1, Hi-1]т вектор счисленных координат i-1-го ЛА; вектор оценок погрешностей счисленных координат i-1-го ЛА на шаге n рекуррентной обработки, причем оценки счисленных координат ЛА, с которого начинается передача данных (в данном случае с первого ЛА), в начальный момент времени принимают равным нулю.
вектор оценок погрешностей счисленных координат i-1-го ЛА на шаге n рекуррентной обработки, причем оценки счисленных координат ЛА, с которого начинается передача данных (в данном случае с первого ЛА), в начальный момент времени принимают равным нулю.
Принимают на входе приемника 1 ближайшего летящего позади ЛА переданные сигналы. С выхода приемника 1 принятая информация поступает на вход вычислителя 4.
Одновременно на вход вычислителя 4 с выхода локатора 2 поступают измеренные параметры относительного местонахождения ближайшего впереди летящего i-1-го ЛА Di,i-1, Ai,i-1, εi,i-1.
В вычислителе 4 выполняются следующие операции:
рассчитывают значения составляющих координат 1-го ЛА по формулам:
где Δt известное время задержки передаваемых сигналов в приемно-передающем тракте;
формируют наблюдение вида
где  вектор рассчитанных по формуле /3/ координат 1- го ЛА;
вектор рассчитанных по формуле /3/ координат 1- го ЛА;
выполняют один шаг рекуррентной обработки в виде
где  вектор оценок ошибок определения геодезических координат i-го ЛА, полученный на предыдущем шаге обработки, причем
вектор оценок ошибок определения геодезических координат i-го ЛА, полученный на предыдущем шаге обработки, причем 
K 1(n+1) коэффициент усиления;
n номер шага обработки, изменяют от 1 до L (величина L характеризует шаг обработки, после которого из-за малости коэффициента веса величина оценки изменяется очень незначительно);
вычисляют вектор уточненных координат i-го ЛА согласно выражения /2/.
С выхода вычислителя 4 i-го ЛА поступают уточненные составляющие координат  и составляющие скорости WNi, WEi, WSi на вход передатчика 5, с выхода которого поступают далее на вход приемника следующего летящего позади ЛА.
и составляющие скорости WNi, WEi, WSi на вход передатчика 5, с выхода которого поступают далее на вход приемника следующего летящего позади ЛА.
После определения уточненных координат последнего в строю ЛА, начиная с данного ЛА последовательно до ЛА, находящегося в начале строя, с выхода передатчика 5 i+1-го ЛА (фиг.4) передают уточненные значения его составляющих координат  и измеренные параметры относительного местоположения Di+1i, Ai+1i, εi+1,i ближайшего летящего впереди ЛА на вход его приемника 1.
и измеренные параметры относительного местоположения Di+1i, Ai+1i, εi+1,i ближайшего летящего впереди ЛА на вход его приемника 1.
С выхода приемника i-го ЛА полученные сигналы поступают на вход вычислителя 4. Одновременно на вход вычислителя 4 с выхода измерителя 3 поступают измеренные составляющие путевой скорости WNi, WEi, WSi.
В вычислителе 4 выполняют следующие операции:
рассчитывают значения составляющих координат i-го ЛА в виде
формируют наблюдение согласно выражению /4/;
выполняют один шаг рекуррентной обработки по формуле /5/;
вычисляют вектор уточненных координат  согласно выражению /2/.
согласно выражению /2/.
С выхода вычислителя 4 на вход передатчика поступают уточненные значения координат  . Одновременно с выхода локатора 2 через вычислитель 4 поступают измеренные параметры относительного местоположения Di,i-1, Ai,i-1, εi,i-1 ближайшего впереди летящего ЛА. С выхода передатчика 5 1-го ЛА поступают на вход приемника 1 i-го ЛА.
. Одновременно с выхода локатора 2 через вычислитель 4 поступают измеренные параметры относительного местоположения Di,i-1, Ai,i-1, εi,i-1 ближайшего впереди летящего ЛА. С выхода передатчика 5 1-го ЛА поступают на вход приемника 1 i-го ЛА.
После выполнения L шагов рекуррентной обработки на всех ЛА за исключением первого и последнего в строю, на которых выполняют L-1 шагов обработки, осуществляют последовательно по мере выполнения последнего шага коррекцию счисленных координат путем вычитания из составляющих счисленных координат оценок их погрешностей, полученных на последнем шаге рекуррентной обработки, при этом откорректированные координаты принимаются в качестве опорной точки, относительного которой производят счисление координат до момента последующей коррекции, определяемого временем выполнения требуемого количества шагов обработки. Причем передачу данных в новом цикле формирования оценок начинают с ЛА, находящегося в противоположном конце строя, чем в предыдущем цикле.
Предполагая, что ошибки счисления каждой из составляющей координаты N-летательных аппаратов, находящихся в строю, представляют собой в каждый момент времени N-взаимно независимых случайных величин с математическим ожиданием MN ___→ O при N ___→ ∞ дисперсией σ
σ
где  дисперсия погрешности определения j-ой составляющей координаты ЛА, вносимая измерителями относительного местоположения ЛА.
дисперсия погрешности определения j-ой составляющей координаты ЛА, вносимая измерителями относительного местоположения ЛА.
Как следует из /7/, эффективность предлагаемого способа тем выше, чем больше ЛА находится в строю, и меньше ошибка, вносимая измерителями относительного местоположения ЛА.
Таким образом, предлагаемый способ коррекции координат группы ЛА позволяет значительно повысить точность определения координат при полетах ЛА строем над безориентирной местностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат группы летательных аппаратов при межсамолетной навигации | 2020 |
|
RU2738039C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ УХОДОВ НАВИГАЦИОННЫХ СИСТЕМ ПОДВИЖНЫХ НОСИТЕЛЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2504733C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРОВ ВОЗДУШНОЙ И ЗЕМНОЙ СКОРОСТЕЙ, УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНОЕ ЛАЗЕРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2238521C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| Способ и система формирования оценки абсолютной высоты полета летательного аппарата, многофункциональный маневренный самолет с такой системой | 2017 |
|
RU2671613C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОПЕРАТИВНЫХ ЦЕЛЕЙ | 2008 |
|
RU2383468C1 |
| Способ навигации летательных аппаратов | 2016 |
|
RU2611564C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
Использование: системы навигации летательных аппаратов (ЛА) при выполнении групповых полетов. Сущность изобретения: на каждом ЛА, находящемся в строю, измеряют параметры относительного местоположения впереди летящего ближайшего ЛА, последовательно от одного конца строя к другому уточняют координаты каждого ЛА за счет выполнения рекуррентной обработки вектора наблюдения и передают их следующему ближайшему ЛА для уточнения координат последнего. Вектор наблюдения формируют как разность между вектором счисленных координат ЛА и вектором рассчитанных координат по измеренным или принятым параметрам относительного местоположения и составляющим скорости ЛА, а также принятым координатам ближайшего ЛА. Через определенное число шагов рекуррентной обработки на каждом ЛА, находящемся в строю, выполняют коррекцию счисленных координат и принимают откорректированные координаты в качестве опорной точки, относительно которой производят счисление координат до момента последующей коррекции. 4 ил.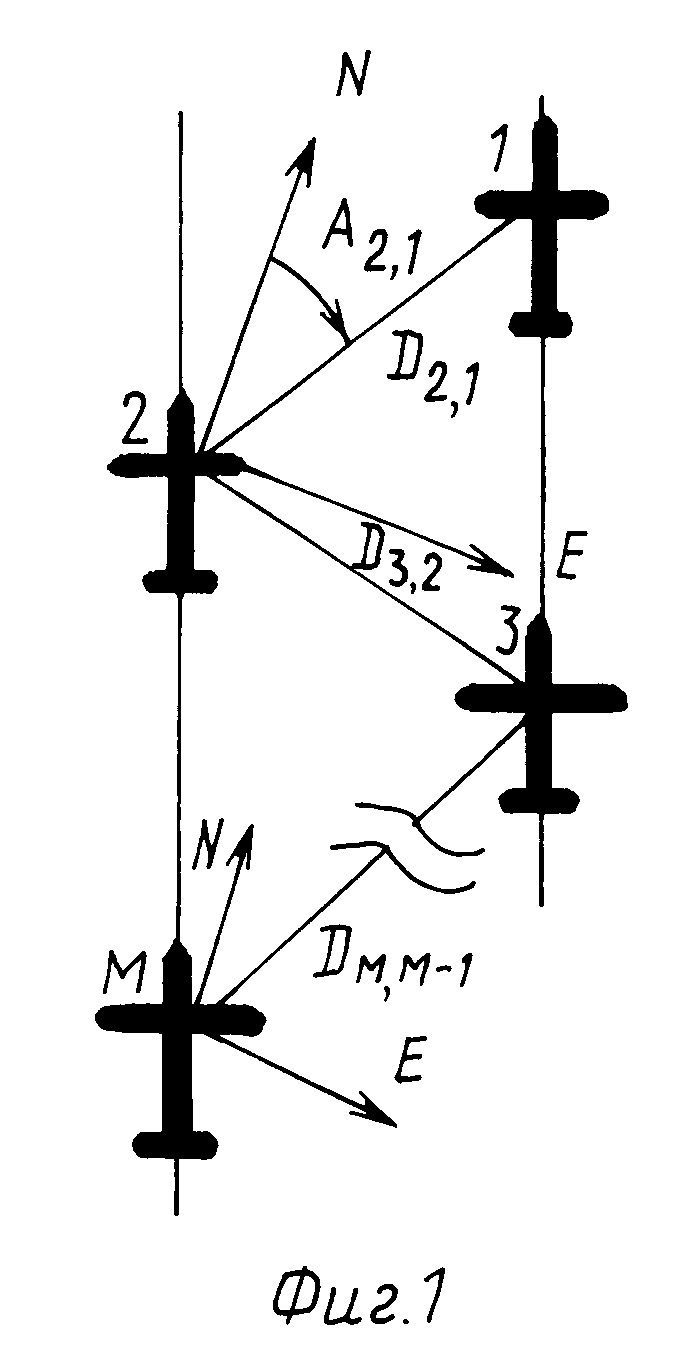
Способ коррекции счисленных координат группы летательных аппаратов, при котором на каждом летательном аппарате измеряют составляющие его собственной скорости, параметры относительного местоположения летательного аппарата относительно ориентира, рассчитывают собственные координаты по измеренным параметрам относительного местоположения, формируют наблюдения как разность между составляющими счисленных координат и составляющими рассчитанных координат, выполняют один шаг рекуррентной обработки наблюдений и получают оценки погрешностей счисленных координат для данного шага обработки, а затем после выполнения L шагов рекуррентной обработки корректируют счисленные координаты путем вычитания из составляющих счисленных координат оценок их погрешностей, полученных на последнем шаге рекуррентной обработки, принимают откорректированные координаты в качестве опорной точки, относительно которой производят последующее счисление до момента следующей коррекции, отличающийся тем, что при полете над безориентирной местностью на каждом летательном аппарате, находящемся в строю, за исключением первого, непрерывно измеряют параметры относительного местоположения ближайшего впереди летящего летательного аппарата и поочередно начиная от летательного аппарата, находящегося в одном конце строя к летательному аппарату, находящемуся в другом конце строя, а затем наоборот последовательно в зависимости от направления передают составляющие скорости каждого впереди летящего летательного аппарата и его составляющие уточненных координат, представляющие собой разность между составляющими счисленных координат и оценками их погрешностей ближайшим летящим позади летательным аппаратом или измеренные параметры относительного местоположения впереди летящего летательного аппарата и составляющие своих уточненных координат ближайшему летящему впереди летательному аппарату, причем оценки счисленных координат летательного аппарата, с которого начинается передача данных, в начальный момент принимают равными нулю, затем в зависимости от направления передачи сигналов на каждом летящем позади или впереди летательном аппарате принимают от ближайшего впереди летящего или позади летящего летательного аппарата переданные им данные, на момент приема в зависимости от направления передачи сигналов по измеренным параметрам относительного местоположения впереди летящего летательного аппарата или принятым параметрам своего относительного местоположения от позади летящего летательного аппарата, принятым составляющим скорости впереди летящего летательного аппарата или измеренным собственным составляющим скорости, принятым составляющим уточненных координат летящего впереди или позади летательного аппарата, рассчитывают собственные координаты, рассчитывают уточненные составляющие собственных координат как разность между счисленными составляющими координат и оценками их погрешностей, полученных после выполнения очередного шага рекуррентной обработки, и передают в зависимости от направления передачи сигналов составляющие уточненных координат и составляющие своей скорости следующему ближайшему позади летящему летательному аппарату или составляющие уточненных координат и измеренные параметры относительного местоположения следующему ближайшему впереди летящему летательному аппарату, причем после L-1 шагов рекуррентной обработки на первом и последнем в строю летательном аппарате, и L шагов на всех остальных летательных аппаратах, находящихся в строю, осуществляют по мере выполнения последнего шага коррекцию счисленных координат, причем передачу данных в новом цикле формирования оценок начинают с летательного аппарата, находящегося в противоположном конце строя, чем в предыдущем цикле.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Молоканов Г.Ф | |||
| и др | |||
| Воздушная навигация | |||
| - Монино: Изд-во ВВА им | |||
| Ю.А | |||
| Гагарина, 1988, с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Молоканов Г.Ф | |||
| Автоматизация самолетовождения и комплексные навигационные системы | |||
| - Монино: Изд-во ВВА им | |||
| Ю.А | |||
| Гагарина, 1977, с | |||
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
